sekilas_pandang_vektor
advertisement

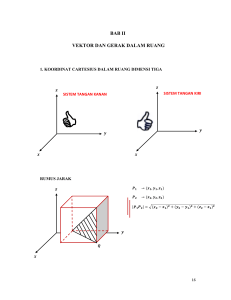
DAFTAR ISI A. Pendahuluan___Hal. 3 B. Vektor di Ruang Dimensi Dua (R2)___Hal. 3 C. Vektor di Ruang Dimensi Tiga (R3)___Hal. 5 D. Penjumlahan, Pengurangan, dan Perkalian Vektor dengan Skalar___Hal. 7 E. Hasil Kali Titik Dua Vektor___Hal. 9 F. Proyeksi Ortogonal suatu Vektor___Hal. 10 G. Hasil Kali Silang Dua Vektor___Hal. 12 DAFTAR PUSTAKA___Hal. 15 : oleh erlenza, http://rleni.wordpress.com/ *) 1 DAFTAR GAMBAR Gambar 1 : Vektor posisi titik A di R2___Hal. 4 Gambar 2 : Vektor posisi titik A di R3 ___Hal. 6 Gambar 3 : 𝑢 + 𝑣 ___Hal. 7 Gambar 4 : 𝑢 + 𝑣 = 𝑣 + 𝑢 ___Hal. 7 Gambar 5 : u v u v ___Hal. 8 Gambar 6 : kv ___Hal. 8 Gambar 7 : Sudut antara vektor u dan v ___Hal. 9 Gambar 8 : Vektor u dan vektor a ___Hal. 10 Gambar 9 : Proyeksi ortogonal vektor u pada vektor a ___Hal. 11 : oleh erlenza, http://rleni.wordpress.com/ *) 2 VEKTOR*) Dalam materi ini akan dibahas mengenai vektor dalam ruang dimensi dua (R2); vektor dalam ruang dimensi tiga (R3); penjumlahan, pengurangan, dan perkalian scalar dengan vektor; hasil kali titik (dot product) dua vektor; proyeksi ortogonal suatu vektor; dan hasil kali silang (cross product) dua vektor. A. Pendahuluan Vektor merupakan ruas garis berarah yang dinyatakan sebagai pasangan terurut yang disebut vektor kolom. Notasi-notasi vektor diantaranya adalah 𝒂, b, 𝑢, v , 𝑶𝑨, atau OA . Mengingat bahwa vektor memiliki arah, maka jika suatu vektor dinyatakan dalam dua huruf kapital, maka urutan huruf-huruf tersebut harus diperhatikan, OA AO . Vektor nol dinotasikan dengan 0 adalah suatu vektor khusus karena memiliki ukuran 0 dan akibatnya vektor tersebut tidak memiliki arah. Vektor khusus lainnya adalah vektor satuan yaitu suatu vektor yang memiliki ukuran 1. Ukuran suatu vektor lebih umum disebut sebagai panjang vektor (norm of a vector). Dua vektor dikatakan sama (equivalent vectors) jika memiliki panjang dan arah yang sama. B. Vektor dalam Ruang Dimensi Dua (R2) Vektor dalam R2 diwakili oleh dua besaran yang disebut komponen x dan komponen y. Vektor dalam dalam R2 dapat digambarkan dalam suatu sistem koordinat Cartesius (bidang). x1 Bentuk umum sebarang vektor 𝑎 di R2 adalah a , 𝑎 = (𝑥1 , 𝑦1 ), y1 atau a x1 i y1 j , dengan 𝑥1 adalah komponen x dan 𝑦1 adalah komponen y dari vektor 𝑎. : oleh erlenza, http://rleni.wordpress.com/ *) 3 1 Vektor-vektor i dan 0 0 j berturut-turut merupakan vektor 1 0 satuan di R2 dan 0 adalah vektor nol di R2. 0 Vektor posisi titik 𝐴(𝑥1 , 𝑦1 ) dinotasikan dengan OA adalah suatu vektor yang dimulai dari titik 𝑂(0,0) dan berakhir di titik 𝐴(𝑥1 , 𝑦1 ), ditulis x1 OA . Titik 𝑂(0,0) disebut titik pangkal dan titik 𝐴(𝑥1 , 𝑦1 ) disebut titik y1 ujung dari vektor OA . Sebagai contoh, vektor posisi titik 𝐴(6,4) adalah suatu vektor yang 6 memiliki titik pangkal 𝑂(0,0) dan titik ujung 𝐴(6,4) ditulis OA . Perhatikan 4 Gambar 1 di bawah ini. y O 1 2 3 4 5 A (6,4) 4 unit 4 6 unit 3 6 OA 2 4 1 6 x Gambar 1 : Vektor posisi titik A (6, 4) Sedangkan vektor AO adalah suatu vektor yang memiliki titik pangkal 6 𝐴(6,4) dan titik ujung 𝑂(0,0), ditulis AO . 4 6 6 Perhatikan bahwa AO OA , dikatakan bahwa vektor 4 4 AO merupakan lawan dari vektor OA . Vektor OA dapat juga dinotasikan dengan , dengan demikian vektor AO dinotasikan dengan – 𝑎 . x1 Panjang vektor OA dinotasikan dengan y1 OA atau OA , dan didefinisikan bahwa OA x12 y12 . : oleh erlenza, http://rleni.wordpress.com/ *) 4 Contoh 1: 6 Panjang vektor OA adalah OA 62 42 2 13 4 Jika diketahui titik 𝐴 (𝑥1 , 𝑦1 ) dan titik 𝐵 (𝑥2 , 𝑦2 ) maka vektor AB dapat dinyatakan sebagai x x AB 2 1 x2 x1 i y2 y1 j y2 y1 C. Vektor dalam Ruang Dimensi Tiga (R3) Vektor dalam R3 diwakili oleh tiga besaran yang disebut komponen x, komponen y, dan komponen z. x1 Bentuk umum sebarang vektor 𝑎 di R3 dinotasikan dengan a y1 , z 1 𝑎 = (𝑥1 , 𝑦1 , 𝑧1 ), atau a x1 i y1 j z1 k , dengan 𝑥1 adalah komponen x, 𝑦1 adalah komponen y, dan 𝑧1 adalah komponen z dari vektor 𝑎, 1 0 0 Vektor-vektor i 0 , j 1 , dan k 0 berturut-turut merupakan 0 0 1 0 vektor satuan di R3 dan 0 0 adalah vektor nol di R3. 0 Vektor posisi titik 𝐴(𝑥1 , 𝑦1 , 𝑧1 ) dinotasikan dengan OA adalah suatu vektor yang dimulai dari titik 𝑂(0,0,0) dan berakhir di titik 𝐴(𝑥1 , 𝑦1 , 𝑧1 ), ditulis x1 OA y1 . Titik 𝑂(0,0,0) disebut titik pangkal dan titik 𝐴(𝑥1 , 𝑦1 , 𝑧1 ) disebut z 1 titik ujung dari vektor OA . : oleh erlenza, http://rleni.wordpress.com/ *) 5 Sebagai contoh, vektor posisi titik 𝐴(4,6,2) adalah suatu vektor yang 4 memiliki titik pangkal 𝑂(0,0,0) dan titik ujung 𝐴(4,6,2), ditulis OA 6 . 2 Perhatikan Gambar 2 di berikut ini. z A(4, 6, 2) 2 a 0 6 y 4 x Gambar 2 : Vektor posisi titik A (4, 6, 2) Sedangkan vektor AO adalah suatu vektor memiliki titik pangkal 4 𝐴(4,6,2) dan titik ujung 𝑂(0,0,0), ditulis AO 6 . 2 4 4 Perhatikan bahwa AO 6 6 OA , dikatakan bahwa vektor 2 2 AO merupakan lawan dari vektor OA . Vektor OA dapat juga dinotasikan dengan , dengan demikian vektor AO dinotasikan dengan – 𝑎 . x1 Panjang vektor OA y1 dinotasikan dengan OA atau OA , dan z 1 didefinisikan bahwa OA x12 y12 z12 . Contoh 2: 4 Panjang vektor OA 6 adalah OA 42 62 22 2 14 2 : oleh erlenza, http://rleni.wordpress.com/ *) 6 Jika diketahui titik 𝐴 (𝑥1 , 𝑦1 , 𝑧1 ) dan titik 𝐵 (𝑥2 , 𝑦2 , 𝑧2 ) maka vektor AB dapat dinyatakan sebagai x2 x1 AB y2 y1 x2 x1 i y2 y1 j z2 z1 k z z 2 1 D. Penjumlahan, Pengurangan, dan Perkalian Skalar dengan Vektor Misalkan diketahui sebarang vektor-vektor tak nol u , v , dan skalar tak nol 𝑘. Operasi yang dapat dilakukan atas vektor , vektor 𝑣, dan suatu skalar 𝑘 diantaranya adalah operasi penjumlahan vektor, pengurangan vektor, dan perkalian vektor dengan skalar. Berikut ini adalah definisi-definisi dan teorema yang berlaku pada operasi tersebut. Definisi 1: 𝑢 + 𝑣 adalah suatu vektor yang ditentukan dengan cara: meletakkan vektor 𝑣 sedemikian sehingga titik pangkal vektor 𝑣 berimpit dengan titik ujung vektor 𝑢 . Perhatikan gambar 3 berikut ini. v u u+v Gambar 3: 𝑢 + 𝑣 Selain itu, 𝑢 + 𝑣 dapat juga ditentukan dengan cara: meletakkan vektor 𝑢 dan meletakkan vaktor 𝑣 sedemikian sehingga titik pangkal vektor 𝑢 berimpit dengan titik ujung vektor . Perhatikan gambar 4 di bawah ini. v u+v v+u u u v Gambar 4: 𝑢 + 𝑣 = 𝑣 + 𝑢 : oleh erlenza, http://rleni.wordpress.com/ *) 7 Definisi 2: Selisih vektor u dan v didefinisikan sebagai u v u v Gambar 5 berikut ini adalah sketsa selisih vektor u dan v . u-v u -v u v u-v v (5a) (5b) u v u v Gambar 5: Definisi 3: Hasil kali kv didefinisikan sebagai vektor yang panjangnya k kali panjang v . Jika k 0 maka kv searah dengan v , jika k 0 maka kv berlawanan arah dengan v . Perhatikan gambar 6 di bawah ini. 2v -2v v Gambar 6 : kv Didefinisikan pula kv 0 jika v 0 atau k 0 . Teorema 1: Jika diketahui sebarang vektor-vektor tak nol u , v , dan w ; sebarang skalar-skalar tak nol k dan l, maka berlaku: 1. 𝑢 + 𝑣 = 𝑣 + 𝑢 2. 𝑢 + 0 = 0 + 𝑢 = 𝑢 3. k lv kl v 4. k l u ku lu 5. u v w u v w 6. u u 0 : oleh erlenza, http://rleni.wordpress.com/ *) 8 7. k u v ku kv 8. 1u u E. Hasil Kali Titik Dua Vektor Misalkan diketahui vektor-vektor tak nol u dan v , yang telah diposisikan sedemikian sehingga titik-titik pangkal kedua vektor tersebut berimpit. Sudut antara vektor u dan v , sebut , memenuhi 0 ≤ 𝛼 ≤ 𝜋, seperti pada gambar 7 berikut. u u v v Gambar 7 : Sudut antara vektor u dan v Definisi 4: Misalkan diketahui sebarang vektor-vektor u dan v , dan adalah sudut antara vektor u dan v . Hasil kali titik (dot product) vektor u dengan vektor v dinotasikan dengan u v , didefinisikan sebagai u v cos , jika u 0 dan v 0 u v jika u 0 dan v 0 0, Perhatikan bahwa hasil kali titik dua vektor menghasilkan suatu skalar. Contoh 3: Jika diketahui vektor-vektor u 2, 1,1 , v 1,1, 2 di R3 dan sudut antara vektor u dan v adalah 60o, maka tentukan u v . Penyelesaian: Diketahui u 2, 1,1 , v 1,1, 2 , dan = 60o. u 22 1 12 6 2 v 12 12 22 6 : oleh erlenza, http://rleni.wordpress.com/ *) 9 u v u v cos 6 6 cos 60 o 3 Teorema 2: x1 x2 Jika diketahui sebarang vektor-vektor u y1 dan v y2 di R3, maka z z 1 2 u . v x1 x2 y1 y2 z1 z2 Contoh 4: Jika diketahui vektor-vektor u 2, 1,3 dan a 4, 1, 2 maka u . a 2 4 1 1 3 2 15 . Teorema 3: Jika diketahui sebarang vektor-vektor tak nol u, v, dan w ; dan suatu skalar tak nol k maka berlaku: 1. u v v . u 2. u v w u v u w 3. k u . v ku . v u . kv 4. v . v 0 jika v 0 dan v . v 0 jika v 0 F. Proyeksi Ortogonal suatu Vektor Dalam banyak penerapan vektor, seringkali suatu vektor akan diuraikan menjadi penjumlahan dua vektor, dimana vektor pertama sepanjang/sejajar dengan vektor yang diketahui, dan vektor kedua tegak lurus/ortogonal dengan vektor yang diketahui. Hal ini dikenal sebagai proyeksi ortogonal suatu vektor. Sebagai contoh, pada gambar 8, vektor u akan diuraikan sepanjang/sejajar vektor a . u a Gambar 8: Vektor : oleh erlenza, http://rleni.wordpress.com/ *) u dan vektor a 10 Proyeksi ortogonal vektor u pada vektor a , dilakukan dengan cara memindahkan vektor a sedemikian sehingga titik pangkalnya berimpit dengan titik pangkal vektor u . Tarik garis melalui titik ujung vektor u tegak lurus vektor a , sebut garis g. Sebut vektor w1 adalah vektor yang memiliki titik pangkal yang sama dan memiliki titik ujung di titik potong garis g dengan vektor a . Sebut vektor w2 adalah suatu vektor yang memiliki titik pangkal yang sama dan sejajar garis g, seperti gambar 9 di bawah ini. w2 u g a w1 u pada vektor a Gambar 9 : Proyeksi ortogonal vektor Pada gambar 9 berdasarkan definisi selisih dua vektor, u w1 w2 , dengan demikian w1 w2 w1 u w1 u . Vektor w1 disebut proyeksi ortogonal vektor u pada vektor a , dinotasikan dengan Proya u . Teorema 4: Jika diketahui sebarang vektor-vektor tak nol u dan a , maka (i) proyeksi ortogonal vektor u pada vektor a adalah u .a Proya u = 2 a a (ii) komponen vektor u yang ortogonal dengan vektor a adalah u – Proya u = u – u .a a 2 a Contoh 5: Jika diketahui vektor-vektor u 2, 1,3 dan a 4, 1, 2 maka tentukan: a. proyeksi ortogonal vektor u pada vektor a b. komponen vektor u yang ortogonal dengan vektor a Penyelesaian: Diketahui vektor-vektor u 2, 1,3 dan a 4, 1, 2 : oleh erlenza, http://rleni.wordpress.com/ *) 11 u . a 2 4 1 1 3 2 15 a 2 42 1 22 2 4 1 2 21 2 2 2 2 a. proyeksi ortogonal vektor u pada vektor a Proya u = u .a a 2 a 15 5 20 5 10 4, 1, 2 4, 1, 2 , , 21 7 7 7 7 b. komponen vektor u yang ortogonal dengan vektor a 20 5 10 u – Proya u = 2, 1,3 , , 7 7 7 14 7 21 20 5 10 , , , , 7 7 7 7 7 7 6 2 11 , , 7 7 7 G. Hasil Kali Silang Dua Vektor Selain menentukan proyeksi ortogonal suatu vektor, dapat pula dibentuk suatu vektor baru yang tegak lurus dengan dua vektor yang diketahui. Pada bagian ini akan dibahas mengenai suatu operasi perkalian vektor yang akan menghasilkan vektor baru. Operasi ini dikenal dengan nama hasil kali silang (cross product) dua vektor. Perhatikan bahwa hasil kali silang dua vektor menghasilkan suatu vektor. Definisi 5: Misalkan diketahui vektor-vektor tak nol u x1 , y1 , z1 dan v x2 , y2 , z3 di R3. Hasil kali silang vektor u dengan vektor v , dinotasikan dengan u v , didefinisikan sebagai y uv 1 y2 z1 z2 , x1 z1 x2 z2 x2 , x1 y1 y2 Dalam menentukan hasil kali silang vektor u x1 , y1 , z1 dengan v x2 , y2 , z3 dapat dilakukan dengan cara membentuk matriks ordo 2 3 : oleh erlenza, http://rleni.wordpress.com/ *) 12 dengan vektor u x1 , y1 , z1 sebagai baris pertama dan vektor v x2 , y2 , z2 sebagai baris kedua, matriks ordo 2 3 yang dimaksud adalah x1 x2 z1 z2 y1 y2 (1) (i) Untuk menentukan komponen pertama u v , hilangkan kolom pertama matriks (1) kemudian tentukan determinan y1 z1 y2 z2 y1 z2 z1 y2 . (ii) Untuk menentukan komponen kedua u v , hilangkan kolom kedua matriks (1) kemudian tentukan determinan – x1 z1 x2 z2 x1 z2 z1 x2 . (iii) Untuk menentukan komponen ketiga u v , hilangkan kolom ketiga matriks (1) kemudian tentukan determinan y1 z1 y2 z2 y1 z2 z1 y2 . Contoh 6: Jika diketahui vektor-vektor u 1, 2, 2 dan v 3,0,1 maka tentukan u v . Penyelesaian: Diketahui vektor-vektor u 1, 2, 2 dan v 3,0,1 . Bentuk matriks ordo 2 3 dengan vektor u 1, 2, 2 sebagai baris pertama dan vektor v 3,0,1 sebagai baris kedua. Matriks yang dimaksud adalah 1 2 2 3 0 1 (i) Komponen pertama u v adalah (ii) komponen kedua u v adalah (iii) komponen ketiga u v adalah 2 2 0 1 1 2 3 1 2 3 0 1 = (2)(1) – (–2)(0) = 2; = – [(1)(3) – (–2)(3)] = – 7; = (1)(0) – (2)(3) = – 6. Jadi u v 2, 7, 6 . : oleh erlenza, http://rleni.wordpress.com/ *) 13 Teorema 5: Jika diketahui sebarang vektor-vektor tak nol u, v, dan w , maka berlaku: 1. u . u v 0 ( u v ortogonal terhadap u ) 2. v . u v 0 ( u v ortogonal terhadap v ) 3. u v u v u .v 2 2 2 2 (Identitas Lagrange) 4. u v w u . w v u . v w 5. u v w u . w v v . w u Teorema 6: Jika diketahui sebarang vektor-vektor tak nol u, v, dan w , dan sebarang skalar tak nol k maka berlaku: 1. u v v u 2. u v w u v u w 3. u v w u w v w 4. k u v ku v u kv 5. u 0 0 v 0 6. u u 0 : oleh erlenza, http://rleni.wordpress.com/ *) 14 DAFTAR PUSTAKA Anton H., (2000). Elementary Linear Algebra 7th Edition. Drexel University Press. Clapham, C. (1996). The Concise Oxford Dictionary of Mathematics 2nd Edition. Oxford University Press. Neill, H. & Quadling, D. (2007). Advanced Level Mathematics Pure Mathematics 2 & 3. Cambridge University Press. Smedley R. & Wiseman G. (2001). Introducing Pure Mathematics 2nd Edition. Oxford University Press. : oleh erlenza, http://rleni.wordpress.com/ *) 15