BAB II TINJAUAN PUSTAKA DAN LANDASAN
advertisement

BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI
2.1 Tinjauan Pustaka
Terdapat berbagai macam demodulator FM apabila dikelompokkan
berdasarkan rangkaian pembangunnya. Modul Demodulator FM pun telah
tersedia namun belum terdapat modul demodulator yang menggunakan Phase
Locked-Loop (PLL).
Pada pembuatan tugas akhir yang terdahulu telah dibuat demodulator FM.
Bagian
yang akan diperdalam dalam pembuatan tugas akhir ini adalah pada
analisa kerja PLL sebagai demodulator.
2.2
Landasan Teori
Radio adalah proses transmisi sinyal melalui udara dengan menggunakan
gelombang elektromagnetik dengan range frekuensi tertentu, mulai dari 3 KHz
sampai 300 GHz. Gelombang-gelombang ini disebut gelombang radio. Radiasi
elektromagnetik dibuat dengan membangun elektromagnetik field dan dapat
menjalar melalui udara serta ruang hampa.
Informasi berupa suara dibawa dengan mengubah nilai-nilai dari
gelombang yang dipancarkan seperti amplitudo, frekuensi atau phasa. Ketika
gelombang radio ini bertemu dengan konduktor elektrikal, pada inductor akan
terbangun sebuah arus alternatif. Informasi yang terdapat pada gelombang dapat
diuraikan kembali menjadi bentuknya semula.
Sistem radio yang digunakan untuk komunikasi akan mempunyai beberapa
elemen. Elemen pertama adalah pemancar. Pemancar merupakan rangkaian
elektrikal yang digunakan untuk membuat sinyal-sinyal yang akan dikirim sesuai
dengan frekuensi yang diinginkan. Terdapat 3 macam modulasi yaitu modulasi
Amplitudo (AM), modulasi Frekuensi (FM), dan modulasi Phasa (PM).
Elemen kedua adalah antenna. Gelombang elektromagnetik akan
menempuh perjalanan udara langsung pada tujuan atau dipantulkan terlebih
dahulu. Hal ini akan mengurangi intensitas gelombang. Dan noise akan muncul
selama dalam perjalanan. Apabila nilai noise lebih besar dari informasi, informasi
3
Bab II Tinjauan Pustaka dan Landasan Teori
yang ada akan sulit untuk diurai kembali. Maka diperlukan antenna dan
perancangan propagasi yang mendukung pemancaran sinyal.
Resonansi merupakan elemen ketiga. Resonansi pada radio akan
memungkinkan
sebuah stasiun dipilih secara khusus. Rangkaian resonansi akan
merespon
pada frekuensi tertentu. Hal ini memungkinkan penerima memilih
secara tepat sinyal dengan frekuensi yang diinginkan.
Elemen keempat adalah penerima. Input receiver berasal dari antenna.
Filter digunakan untuk memisahkan sinyal yang tidak diinginkan. Sinyal yang
didapat kemudian diolah melalui proses demodulasi dan dikembalikan
telah
kembali
ke bentuk asalnya seperti suara, gambar atau data.
Modul radio frekuensi biasanya berupa rangkaian sederhana yang
digunakan untuk memancarkan, menerima atau keduanya pada nilai frekuensi
carrier tertentu. Penggunaan modul ini sangat luas. Pada pembuatan Tugas Akhir
ini akan dibuat Modul Radio Frekuensi yang dapat digunakan untuk kepentingan
praktikum pada Mata Kuliah Elektronika Komunikasi.Pemancar radio FM stereo
di Indonesia memiliki range frekuensi kerja pada 75 MHz sampai dengan 108
MHz. Namun karena modul yang dibuat hanya merupakan model dari
demodulator FM, maka frekuensi kerja yang digunakan bernilai 300 KHz.
2.2.1 Modulasi Frekuensi
Pada modulasi frekuensi, frekuensi carrier bervariasi sesuai dengan sinyal
informasi yang harus dikirim. Frekuensi carrier mengasumsikan satu harga untuk
sebuah bit 1 dan yang lainnya untuk bit 0. Tipe modulasi on/off ini juga disebut
frequency shift keying (FSK) atau carrier shift keying. Modulasi ini dapat pula
berupa proses analog yang kontinyu, input sinyalnya berupa sembarang bentuk
gelombang yang dianggap sebagai sekumpulan gelombang sinus.
Carrier yang tidak termodulasi dapat ditulis dengan persamaan ac = Ac sin
2πfct. Bila frekuensi fc dimodulasikan oleh gelombang sinus yang berfrekuensi fm,
maka didapatkan acm = Ac sin 2π(fc + fc sin 2π fmt)t dengan fc adalah deviasi
frekuensi maksimum yang dapat terjadi.
Sinyal FM ditransmisikan pada amplitudo yang konstan.Noise yang
muncul terkadang memengaruhi perubahan frekuensi.Namun noise lebih banyak
memberikan efek pada amplitudo. Perubahan ini dapat diabaikan dengan adanya
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
4
Bab II Tinjauan Pustaka dan Landasan Teori
proses deteksi. Dengan bantuan sepotong amplitudo pada amplitudo nol. Secara
teori, gelombang terima yang seketika melintasi nol yang digunakan dalam proses
deteksi. Pada rangkaian deteksi, limiter mengubah persilangan nol ini menjadi
gelombang
persegi.Selanjutnya rangkaian ini memindahkan setiap distorsi
amplitudo
menjadi gelombang kotak.Output limiter kemudian dapat diolah untuk
mendapatkan pola bit asli.
Gambar 1. Modulasi Frekuensi
Dalam modulasi frekuensi, index modulasi dihitung dengan menggunakan
persamaan sebagai berikut.
|
|
(2.1)
di mana fm adalah nilai frekuensi tertinggi dari sinyal modulasi xm(t) dan
Δf adalah deviasi frekuensi sinyal carrier.
Apabila h << 1 modulasi yang terjadi disebut sebagai FM narrowband dan
bandwithnya mendekati 2fm. Apabila h >> 1 modulasi yang terjadi disebut sebagai
FM wideband dan bandwithnya mendekati 2Δfc. FM yang memiliki bandwith
yang lebih besar memiliki rasio signal to noise yang lebih besar pula. Sinyal FM
yang konstan dan memiliki index modulasi yang terus bertambah, akan memiliki
bandwith yang lebih besar. Namun jarak antar spektrum akan berkurang.
2.2.2 Phase Locked-Loop
Phase Locked-Loop(PLL) adalah sebuah sistem feedback dimana sinyal
balik digunakan untuk mengunci frekuensi output dan fasanya serta fasa dari
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
5
Bab II Tinjauan Pustaka dan Landasan Teori
sinyal input. Bentuk gelombang input dapat berupa berbagai macam sinyal,
termasuk sinyal sinusoidal atau sinyal digital. Phase Locked-Loop pertama kali
digunakan pada tahun 1932 sebagai deteksi sinkron dari sinyal radio.Penerapan
ini berkaitan
dengan deteksi sinyal yang telah ditransmisikan.
Dimulai pada tahun 1960-an, program satelit NASA menggunakan Phase
Locked-Loop untuk menetapkan frekuensi sinyal pancar satelit. Walaupun sinyal
dirancang untuk dipancarkan pada frekuensi 108 MHz, penggeseren oleh osilator
dan shift Doppler menghasilkan beberapa kilohertz pergeseran frekuensi pada
yang diterima. Sinyal yang dipancarkan memiliki bandwith yang sangat
sinyal
sempit,
namun karena adanya pergeseran frekuensi dibutuhkan bandwith yang
lebih lebar pada penerima kemungkinan penambahan pada noise (daya noise
penerima berbanding lurus dengan bandwith). Namun, komunikasi satelit
kemudian berkembang dengan digunakannya Phase Locked-Loop untuk
mengunci frekuensi sinyal pancar, dan memungkinkan bandwith penerima yang
lebih sempit dengan jauh lebih kecil daya noise.
Phase Locked-Loop telah banyak digunakan untuk filter, frekuensi
synthesis, motor-speed control, frekuensi modulasi, demodulasi, deteksi sinyal,
dan macam-macam lainnya. Munculnya kesadaran Phase Locked-Loop sebagai
rangkaian terintegrasi yang relatif tidak mahal telah menyebabkan Phase LockedLoop menjadi rangkaian yang paling sering digunakan dalam komunikasi.Phase
Locked-Loop dapat berupa rangkaian analog maupun digital, namun kebanyakan
terdiri atas komponen analog dan digital.
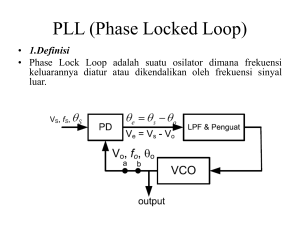
Gambar 2. Blok diagram Phase Locked-Loop.
Gambar 2 mengilustrasikan arsitektur dasar dari Phase Locked-Loop.
Detektor fasa menghasilkan sinyal output berupa fungsi dari perbedaan fasa antara
dua buah sinyal input. Output detektor difilter (dan mungkin juga dikuatkan) dan
komponen DC dari sinyal eror diterapkan pada voltage-controlled oscillator.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
6
Bab II Tinjauan Pustaka dan Landasan Teori
Sinyal feedback yang masuk ke phase detektor adalah frekuensi output VCO
dibagi dengan N. Kontrol tegangan VCO Vc(t) memaksa VCO untuk mengubah
frekuensi dengan arahan untuk mengurangi perbedaan antara frekuensi input dan
frekuensi
output dari divider. Apabila dua frekuensi ini dekat, mekanisme PLL
memaksa
frekuensi kedua input ini menjadi sama dan VCO terkunci dengan
frekuensi masuk (incoming, yang datang). Yaitu,
fr = fd
(2.2)
fd = fo/N
(2.3)
fo = Nfr
(2.4)
dan frekuensi output divider adalah
Frekuensi output
adalah sebuah integral bertingkat dari frekuensi input. Apabila divider tidak
digunakan maka N sama dengan 1. Begitu loop terkunci, akan terdapat perbedaan
kecil fasa diantara dua sinyal input phase detektor. Perbedaan ini menghasilkan
sebuah tegangan DC pada output phase detektor yang dibutuhkan VCO dari freerunning frekuensi dan menjaga loop tetap dalam keadaan terkunci. (ini bukan tipe
PLL yang sebenarnya).
Kemampuan self-koreksi dari PLL memungkinkannya untuk mendeteksi
perubahan frekuensi di sinyal input begitu terjadi kondisi lock. Range frekuensi
yang dapat ditahan dalam posisi lock sebagai sinyal input oleh PLL disebut
sebagai lock range. Sedangkan capture range adalah range frekuensi yang dapat
dilock oleh loop. Dan range ini lebih sempit dibandingkan lock range.
Karena output frekuensi PLL adalah sebuah integral bertingkat dari
frekuensi referensi, frekuensi output dapat diubah dengan mengubah rasio
pembagi N. komponen pembagi ini telah dibuat dapat diperoleh dengan mudah.
Penyediaan ini memungkinkan pembuatan banyak frekuensi dari sebuah input
frekuensi. Frekuensi sintesis adalah aplikasi yang paling sering digunakan PLL.
2.2.3 Model Linear Phase Locked-Loop
PLL nonlinear karena phase detektornya nonlinear, bias dimodelkan
sebagai perangkat linear ketika perbedaan fasa di input phase detektor kecil.
Untuk analisa linear, diasumsikan output phase detektor adalah sebuah fungsi
linear dari perbedaan fasa kedua sinyal input, yaitu
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
7
Bab II Tinjauan Pustaka dan Landasan Teori
Va = Kd(θr – θd)
(2.5)
di mana θr dan θd adalah phase dari sinyal input dan sinyal feedback dan Kd adalah
gain factor dari phase detektor dengan satuan volt/radian. VCO juga diasumsikan
dapat
dijadikan model perangkat linear yang output frekuensinya merupakan
deviasi
frekuensi free-running dengan peningkatan
Δω = KOVC
(2.6)
di mana VC adalah tegangan input VCO dan KO adalah gain factor VCO, dalam
satuan radian per second per volt. Output frekuensinya adalah
ω0 = ωc + Δω = ωc + K0Vc
(2.7)
di mana
ωc adalah frekuensi free-running dari VCO. Karena frekuensi adalah fasa
dalam fungsi waktu, operasi VCO dapat dituliskan juga sebagai
Δω =
= KoVc
(2.8)
Hasil akhir dari pembagi frekuensi fd adalah pembagi frekuensi input
dibagi dengan N, yaitu
fd =
(2.9)
atau, karena phase adalah integral waktu dari frekuensi
θd =
(2.10)
untuk model PLL, rangkaian pembagi N dapat diganti dengan sebuah scalar
frekuensi-independent yang setara dengan 1/N. dengan asumsi ini, PLL dapat
direpresentasikan dengan model linear pada gambar 3 di bawah dimana F(s)
adalah fungsi transfer dari LPF.
Gambar 3. Model Linear sinyal kecil dari Phase Locked-Loop
Fungsi transfer linear dari hubungan output phase θo(s) dan input phase
θr(s) adalah
⁄
⁄
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
⁄
(2.11)
8
Bab II Tinjauan Pustaka dan Landasan Teori
Fungsi transfer yang sama menunjukkan hubungan frekuensi input dan
output fr(s) dan fo(s). apabila LPF tidak digunakan, fungsi transfernya adalah
(2.12)
⁄
yang ekivalen dengan fungsi transfer dari LPF sederhana dengan Gain DC sebesar
banwith Kv dimana
N dan
(2.13)
digunakan untuk menyederhanakan notasi.
PLL ini dijadikan referensi sebagai first-order loop karena dapat
dideskripsikan dengan persamaan diferensial orde pertama dan juga merupakan
tipe I.
Dengan model matematika yang digunakan di sini, PLL tampak seperti
LPF, namun frekuensi dan phase output menampilkan defiasi dari frekuensi freerunning ωc. PLL sebenarnya adalah BPF dengan frekuensi tengah pada frekuensi
input gelombang. Output phase detektor adalah sinyal frekuensi rendah yang
difilter oleh LPF. Sangatlah mudah untuk membangun LPF narrow-bandwith
dibandingkan filter dengan Q yang tinggi yang mungkin lebih dibutuhkan. Ini
adalah salah satu keunggulan utama PLL.
Biasanya dalam loop juga terdapat filter untuk menyaring komponenkomponen yang tidak diinginkan dari phase detektor dan untuk menyediakan
kontrol terhadap respon frekuensi loop. Apabila F(s) adalah sebuah LPF
sederhana, maka
F(s) = (
)
(2.14)
dan fungsi transfer dari loop tertutup adalah
⁄
(
di mana
⁄
)
⁄
(2.15)
(2.16)
(2.17)
( )
(2.18)
Persamaan 2.15 adalah bentuk umum dari fungsi transfer LPF orde kedua.
Persamaan ini sering muncul dalam analisa PLL. Nilai dari respon frekuensi
steady-state adalah
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
9
Bab II Tinjauan Pustaka dan Landasan Teori
|
|
*(
⁄
)
(2.19)
+
dan phase shift-nya
⁄
(
⁄
)
(2.20)
Nilai dari respon frekuensi pada fungsi transfer orde kedua ini ditentukan
untuk nilai ζ tertentu. Untuk ζ = 0,707, fungsi transfer menghasilkan respon
butterworth “maximally flat” orde kedua. Untuk nilai ζ < 0,707, puncak gain
terdapat pada domain frekuensi. Nilai maksimum dari respon frekuansi Mp
sebagai fungsi damping rasio dapat ditemukan dengan mengatur deriatif dari
persamaan
2.19 – dengan „respect to frekuensi‟ sama dengan nol. Nilai Mp dapat
ditentukan dengan persamaan berikut.
(2.21)
dan frekunsi ωp dimana nilai maksimum muncul adalah
(2.22)
Gambar 4. Magnitude dari PLL orde kedua sebagai fungsi frekuensi dari damping rasio tertentu.
Bandwith 3dB ωh dapat diatur dengan mengubah frekuensi ωn pada
persamaan 2.19 menjadi sama dengan 0,707 untuk gain DC (0,707N). dan ωh
akan bernilai (dengan ζ < 1)
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
10
Bab II Tinjauan Pustaka dan Landasan Teori
(2.23)
Waktu yang dibutuhkan agar didapat nilai output naik dari 10% ke 90%
dari nilai akhirnya disebut rise time tr. Rise time adalah nilai pendekatan terhadap
bandwith
sistem dengan hubungan
(2.24)
yang bernilai tetap untuk sistem orde pertama.
Biasanya bandwith dirancang untuk lebih semput agar didapat maksimum
filter
dan rise time yang pendek sehingga loop dapat mengikuti perubahan dari
gelombang input. Persamaan 2.24 menunjukkan bahwa perancangan ini tidak
memungkinkan.Perancangan hanya dapat memilih salah satu antara kecepatan
respon sistem dan bandwith sistem.
Karakteristik sistem dapat diubah dengan mengubah gain loop atau
bandwith filter atau dengan menambahkan filter dengan orde yang lebih tinggi.
2.2.4 Phase detektor
Karakteristik kinerja PLL sangat beragam tergantung pada tipe phase
detektor yang digunakan. Tiga bentuk phase detektor yang paling sering digunaka
adalah digital detektor yang output sinyalnya terbatas hanya pada dua atau tiga
level yang berbeda, mixer atau multiplier, dan sampling phase detektor.
2.2.4.1
Digital phase detektor
Rangkaian logika saat ini telah menjadi phase detektor yang paling sering
dipakan karena telah tersedia sebagai IC yang kecil dan murah. Output rangkaian
logika PD adalah sebuah pulsa amplitudo konstan yang lebar pulsanya sebanding
dengan perbedaan fasa dari dua buah sinyal input (yang dapat berupa sinyal
analog maupun digital).
2.2.4.2
Exclusive-OR Phase Detektor
Rangkaian eksklusif-OR ditunjukkan pada Gambar 5 biasa digunakan
sebagai salah satu tipe PD yang paling sederhana. Output rangkaian ini tinggi bila
dan hanya bila salah satu sinyal input tinggi. Dalam digital PD, phase error
didefinisikan sebagai
(2.25)
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
11
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 5. Phase Detektor Exclusive-OR
Dimana T adalah perioda dari sinyal input dan τ adalah perbedaan waktu
antara kedua buah sinyal. (apabila kedua input tidak memilki frekuensi yang
sama, phase error akan ambiguous). Nilai rata-rata dari output gerbang eksklusifOR sebagai fungsi dari phase error digambarkan pada Gambar.5. Diasumsikan
kedua sinyal input memiliki 50 duty cycle. Output maksimum (output gerbang
tinggi pada tiap waktu) ketika kedua sinyal berbeda fasa sebesar 180 o.terdapat dua
buah nilai phase error untuk setiap tegangan output, tapi hanya satu nilai yang
akan berkoresponden dengan gain loop negative dan nilai yang lain untuk gain
loop positif. Untuk nilai positif dari gain loop, sistem loop-tertutup tidak stabil,
dan error yang muncul akan menyesuaikan diri dengan phase error loop
feedback-negatif. Satu kerugian dari eksklusif-OR sebagai PD adalah outputnya
tergantung pada duty cycle dari sinyal input.
2.2.4.3
Flip-flop Detektor
Rangkaian sederhana set-reset flip-flop ditunjukkan pada Gambar 7 dapat
pula digunakan sebagai phase detektor. Sinyal fa dan fb berupa pulsa narrow yang
dihubungkan ke input set dan reset. Nilai rata-rata keluaran Q berbanding lurus
terhadap perbadaan phase kedua sinyal. Nilai rata-rata dari karakteristik transfer
tegangan terhadap phase ditunjukkan pada Gambar 8. Phase detektor ini memiliki
kelebihan apabila dibandingkan dengan rangkaian eksklusif-OR yaitu phase
detektor flip-flop memiliki phase range 2 kali lipat lebih besar (0 sampai 2π).
Tegangan output hanya akan mencapai V V ketika phase error mencapai 2π rad.
Kekurangan dari phase detektor ini adalah output memerlukan filter lebih
apabila dibandingkan dengan output phase detektor eksklusif-OR. Dengan
mempertimbangkan timing diagram pada Gambar 9 (diasumsikan di sini beberapa
langkah digunakan untuk mengubah sinyal input A dan B menjadi pulsa digital),
output rangkaian eksklusif-OR memiliki frekuensi dua kali lipat frekuensi sinyal
inputnya, sedangkan output flip-flop memiliki frekuensi yang sama dengan
inputnya.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
12
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 6. Output tegangan rata-rata sebagai fungsi phase error dari PD eksklusif-OR
Gambar 7. Flip-flop RS yang digunakan sebagai phase detektor.
Gambar 8. Output teganga rata-rata sebagai fungsi phase error untuk PD flip-flop RS
Gambar 9. Respon output PD eksklusif-OR dan flip-flop RS terhadap input PD fA dan fB
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
13
Bab II Tinjauan Pustaka dan Landasan Teori
Hal ini menunjukkan komponen AC pada output rangkaian eksklusif-OR
memiliki kecepatan dua kali lipat kecepatan output flip-flop. Dengan sebab ini
rangkaian ekskludif-OR membutuhkan LPF yang lebih akurat. Flip-flop RS
berkerja
maksimal dengan sinyal input low duty-cycle. Output yang didapat akan
memiliki
flat spot dengan lebar sesuai sinyal input yang akan memberikan efek
negatif pada kinerja PLL.
2.2.4.4
Dual-D flip-flop
Karakteristik phase-tegangan dari set-reset flip-flop sebelumnya sensitive
terhadap
lebar pulsa dari sinyal input. Apabila lebar pulsa tersebut tertentu, salah
satu karakteristik yang muncul adalah sifat non-linear. Dual-D flip flop
ditunjukkan pada Gambar 10 kurang sensitive terhadap duty cycle. Nilai D flipflop tinggi pada edge awal sinyal input dan akan tetap tinggi sampai mereka di
reset. Sinyal reset muncul ketika kedua input tinggi. Ketika kedua sinyal berada
dalam fasa dan frekuensi yang sama, kedua output akan tetap bernilai rendah dan
tidak ada sinyal pump yang akan diterapkan pada LPF. Ketika kedua sinyal
memiliki frekuensi yang sama, tapi tidak pada phase, karakteristik transfer
tegangan DC output akan seperti yang ditunjukkan pada gambar 8 untuk RS flipflop. Apabila kedua sinyal berbeda frekuensi, output tegangan akan bergantung
pada frekuensi relative fan perbedaan fasa.
Gambar 10. Phase detektor dual-D flip-flop, termasuk di dalamnya LPF
Timing diagram pada Gambar 11 menunjukkan contoh kasus di mana f2 =
2f1. Pada gambar 11a, leading edge f1 muncul tepat setelah f2 yang menghasilkan
Q2 bernilai 50% dari waktu (Q2 menjadi tinggi ketika f2 bernilai tinggi dan
kemudian mereset ketika f1 bernilai tinggi), dan nilai rata-rata dari output PD
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
14
Bab II Tinjauan Pustaka dan Landasan Teori
adalah 0,5 V. pada gambar 10b, leading edge f1 muncul tepat sebelum f2 yang
menghasilkan Q2 tinggi hampir di seluruh waktu, dan tegangan rata-ratanya
mendekati V. rata-rata tegangan output terhadap perbedaan fasa sebesar 0,75 V
untuk
f2 = 2f1.
Gambar 11(a). Output PD dual-D flip-flop (Q2) ketika f1 mendahului f2
(b). Output PD dual-D flip-flop (Q2) ketika f2 mendahului f1.
Gambar 12. Rata-rata output dual-D flip-flop sebagai fungsi dari perbedaan frekuensi input
Secara umum, rata-rata output dapat diperhitungkan dengan rumus
(
)
(2.26)
Dengan f2 lebih besar dari f1.Rumus ini digambarkan pada Gambar 12.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
15
Bab II Tinjauan Pustaka dan Landasan Teori
2.2.4.5
Phase-Frequency Detektor
Walaupun phase detektor eksklusif-OR dan flip-flop sederhana, namun
keduanya memiliki beberapa batasan. Salah satunya adalah sinyal output
memerlukan
substantial filter untuk mendapat nilai DC. Selain itu, loop akan
lambat
bereaksi apabila kedua sinyal input tidak sama frekuensinya. PD phase frekuensi (atau three-state) dirancang untuk menghilangkan batasan-batasan
ini.Phase-frequency detektor berlaku sebagai phase detektor selama lock dan
menyediakan sinyal yang sensitive terhadap frekuensi untuk membantu
pendudukan
ketika loop keluar dari kondisi lock. Phase-frequency detektor telah
tersedia
dalam bentuk IC dan sudah termasuk diantaranya charge pump.Charge
pump digambarkan pada gambar 14. Charge pump terdiri atas sumber arus yang
dikontrol oleh tegangan, bahwa nilai output arus plus atau minus I tergantung
pada nilai tegangan kontrol. Untuk nilai lain tegangan kontrol, arus yang di dapat
nol (atau sama dengan rangkaian terbuka). Apabila kapasitor merupakan
rangkaian terintegrasi, satu komponen ditambahkan pada sumber untuk
mendapatkan fungsi transfer. Dan loopnya menjadi loop tipe II. Jika C di-shunt
oleh resistor, loop akan tetap sebagai loop tipe I.
Gambar 13. Rangkaian charge pump.
Banyak pabrik saat ini telah memroduksi Quad-D phase-frekuensi
detektor. Jika kedua frekuensi sinyal input bernilai sama, flip-flop Q1a dan Q2a
tidak akan pernah set, dan rangkaian akan berfungsi sebagai dual-D flip-flop.
Apabila kedua sinyal tidak memiliki frekuensi yang sama, maka either Q1a or Q2a
will be set. Kedua flip-flop ini berperan sebagai pendeteksi apakah sinyal
memiliki frekuensi yang berbeda. Sebagai contoh, jika f1 setidaknya dua kali lebih
cepat dibandingkan f2, maka Q1a atau Q1b akan selalu bernilai tinggi.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
16
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 14. Quad-D phase-frequency detektor
Karakteristik tegangan rata-rata terhadap frekuensi relative digambarkan
pada Gambar 16. Berlaku untuk f2 ≥ f1. Perlu diingat apabila frekuensi tidak sama,
rat-rata tegangan output akan lebih besar dibandingkan rata-rata tegangan output
dual-D flip-flop. Karena tegangan yang lebih besar diterapkan pada VCO, loop
dapt bereaksi lebih cepat. Begitu loop mencapai frekuensi lock, phase error
didapatkan dari Q1b dan Q2b seperti yang didapatkan dari dual-D flip-flop.
Gambar 15. Output tegangan rata-rata dari quad-D phase-frekuensi detektor sebagai fungsi dari
perbedaan frekuensi input
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
17
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 16. Output tegangan rata-rata sebagai fungsi phase error dari quad-D phase-frekuensi
detektor.
Apabila loop dalam keadaan lock, karakteristik rata-rata tegangan terhadap
phase ditunjukkan pada Gambar 16. Range phase untuk phase-frequency detektor
adalah 720o.
2.2.4.6
Mixers
Mixer dan multiplier sering digunakan sebagai phase detektor dalam PLL
analog. Apabila sinya input adalah θi = Ai sin ω0t dan sinyal referensi adalah θr =
Ar sin (ω0t + Ø), di mana Ø adalah perbedaan fasa antara kedua sinyal, maka
sinyal output θ adalah
(2.27)
di mana K adalah gain mixer. Salah satu fungsi utama dari loop LPF adalah untuk
mengeliminasi harmonisa kedua sebelum mencapai VCO. Harmonisa kedua akan
diasumsikan telah difilter dan hanya bagian pertama yang akan diperhitungkan.
Maka,
(2.28)
Ketika sinyal error sama dengan nol, Ø = π/2. Sinyal error ini proportional
untuk perbedaan fasa sebesar 90o.untuk perubahan kecil fasa ΔØ,
(
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
)
18
Bab II Tinjauan Pustaka dan Landasan Teori
Untuk perubahan/gangguan kecil pada fasa ΔØ
(2.29)
karena output phase detektor diasumsikan menjadi θ = Kd(θi – θo). factor skala
dari phase detektor Kd bernilai
(2.30)
Faktor skala phase detektor Kd tergantug pada nilai amplitudo sinyal input,
perangkat ini hanya dapat dipertimbangkan linear karena amplitudo sinyal input
yang
tetap dan deviasi fasa yang kecil. Untuk deviasi fasa yang lebih besar,
(2.31)
yang menggambarkan hubungan non-linear antara θ dan Ø.
2.2.4.7
Detektor Sampling
Phase detektor bisa didapat dari switch linear time-varying yang ditutup
secara periodik. Secara teori matematis, switch ini dapat digambarkan sebagai
pulsa modulator, seperti yang ditunjukkan pada Gambar 18. Apabila operasi
sampling dilakukan berdasarkan periode waktu, yaitu apabila sample dilakukan
dengan jarak pendek P sebagai contoh T = 0, T, 2T, … , nT, maka sampling akan
seragam. Bentuk gelombang input dan output dari perangkat yang menghasilkan
sampling dengan rate yang seragam ditunjukkan pada gambar 19. Outputnya
dapat diperhitungkan dengan
θ(t) = θi(t)θr(t)
(2.32)
di mana θr(t) dapat diasumsikan sebagai rantai periodic dari pulsa amplitudo tetap
dari amplitudo Ar, lebar sinyal P, dan periode T. Karena θr(t) bersifat periodic
seperti yang digambarkan pada Gambar 20, persamaan ini dapat dikembangkan
dalam seri Fourier sebagai berikut
∑
di mana
(2.33)
∫
(2.34)
(
)
n≠0
(2.35)
n=0
(2.36)
maka didapatkan
∑
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
*
(
)+
(2.37)
19
Bab II Tinjauan Pustaka dan Landasan Teori
apabila sinyal input adalah gelombang sinus
maka
(
{
∑
[
]
[
]})
(2.38)
loop dalam keadaan lock (ωi = ω0). Nilai DC-nya adalah
ketika
⁄
(
)
(2.39)
Gambar 17. Switch yang dimodelkan sebagai modulator fasa.
Gambar 18. Contoh bentuk gelombang input dan output dari perangkat sampling
Gambar 19. Pulsa modulasi digunakan sebagai model sample
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
20
Bab II Tinjauan Pustaka dan Landasan Teori
Kondisi ω0 P/2 muncul karena pulsa θr(t) diasumsikan mulai pada saat t =
0. Apabila waktu originalnya digeser ke tengah pulsa, kondisi ini tidak akan
muncul. Untuk perbedaan kecil fasa Ø, sinyal error akan sebanding dengan
perbedaan
fasa. Karena sebab itu, switch linear time-varying dapat berperan
sebagai
phase detektor. Apabila perbedaan output DC dari mixer adalah nol ketika
Ø = -ωoP/2. Yaitu ketika fasa osilator dan sinyal referensi sama. Hal ini
membedakan mixer sebagai phase detektor, yang dapat di-null-kan ketika kedua
sinyal berada dalam phase quadrature. Sedangkan pada mixer, nilai konstan gain
sampling-phase-detektor
Kd berbanding lurus dengan amplitudo sinyal yang
digunakan.
Kondisi yang dibutuhkan untuk menampilkan karakteristik linear pada
kedua loop adalah amplitudo sinyal input bernilai konstan dan nilai phase error
sangat kecil hingga memenuhi persamaan berikut
(
)
(2.40)
Gambar 20. Output ZODH dibandingkan dengan output yang diinginkan (sinyal putus-putus)
Ketika loop dalam keadaan lock (ωi = ωo), output mixer mengandung DC
dan harmonisa kedua, sedangkan output sampling phase detektor mengandung
DC dan seluruh harmonisa dari frekuensi input. Maka dari itu untuk sampling
phase detektor dibutuhkan LPF yang lebih ketat dibandingkan mixer sinusoidal.
Fortunately, telah ada filter yang dapat diterapkan untuk sampling PD. Filter yang
paling umum digunakan adalah zero-order data hold (ZODH) atau generator
boxcar. ZODH adalah sebuah perangkat yang mengubah pulsa dengan lebar P
menjadi pulsa amplitudo konstan dengan lebar T, seperti ditunjukkan pada
gambar 20. Output ZODH di antara kedua sampling ti dan ti+1 adalah
θo(t) = θ(ti)[u(t) – u(ti)]
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
(2.41)
21
Bab II Tinjauan Pustaka dan Landasan Teori
di mana θ(ti) adalah nilai θ(t) pada saat ti. meskipun analisa kombinasi
pulsa sampling dan ZODH sangat rumit, respon prekuensi akan mendekati
perkiraan apabila proses sampling diganti dengan sample ideal yang outputnya
rangkaian dari impulse.
berupa
Sinyal sample θ*(t) terdiri atas serangkaian impul modulasi amplitudo
θ*(t) = θi(t)δT(t)
(2.42)
di mana δT(t) adalah satu unit impuls dari periode T,
∑
(2.43)
dan δ(t – nT) mewaliki unit area yang muncul pada saat t = nT. δT(t) bersifat
periodic
dan dapat dituliskan dengan seri Fourier
∑
(2.44)
di mana ωo = 2π/T. Nilai konstan Cn ditentukan oleh
∫
(2.45)
Kemudian δT(t) dapat dikembangkan dalam seri Fourier
∑
(2.46)
dan karena
∑
(2.47)
Berdasarkan persamaan-persamaan di atas, spectrum frekuensi dari
serangkaian impuls pada perioda T mengandung komponen DC dan frekuensi
fundamental dan seluruh harmonisa dengan amplitudo 1/T. persamaan (2.42)
dapat juga dituliskan sebagai
∑
(
)
(2.48)
Apabila input θi(t) adalah gelombang sinus θi(t) = Ai sin (ωit + Ø),
∑
(2.49)
Persamaan ini mirip dengan hasil yang di dapat dari persamaan (2.38)
untuk hasil realistic sample model finite-pulse-width. Perbedaannya, harmonisa
pada model finite-pulse-width diatenuasi oleh
(2.50)
Dengan sampler impuls, seluruh harmonisa diatenuasi oleh 2/T.
Respon impuls dari ZODH adalah sebuah pulsa dengan lebar T, atau
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
22
Bab II Tinjauan Pustaka dan Landasan Teori
θo(t) = u(t) – u(t – T)
(2.51)
dan fungsi transfer frequency-dependent adalah
(2.52)
dan respon frekuensi ZODH adalah
(2.53)
yang merupakan LPF dengan phase shift linear seperti yang ditunjukkan pada
gambar 22. Sebuah fitur penting dari filter ini adalah tidak memberikan gain pada
frekuensi
sampling dan seluruh harmonisanya. Seperti yang ditunjukkan pada
persamaan
(2.49) atau persamaan (2.38), ketika input dan frekuensi sampling
sama outputnya akan menghasilkan komponen DC dan seluruh harmonisa dari
frekuensi sampling. Karena ZODH tidak memberikan gain pada frekuensi yang
bukan nol ini, seluruh harmonisa yang tidak diinginkan dihapus oleh filter. Ini
adalah salah satu alas an utama mengapa PLL banyak digunakan.ZODH juga
memiliki phase lag yang naik berbanding lurus dengan kenaikan frekuensi.
Walaupun PLL yang dibangun dengan sampling detektor biasa dianalisa
dengan menggunakan teknik transformasi-Z, hasil yang hampir sama akan didapat
pula pada kinerja loop dengan menggunakan teknik kontinyu.
Ketika frekuensi input dan feedback sama, persamaan (2.49) dapat
dituliskan sebagai berikut
high-frequency term
(2.54)
Gambar 21. Respon frekuensi dari ZODH
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
23
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 22. Model PLL yang mengandung modul sample-and-hold yang disederhanakan
Karena kondisi-kondisi pada frekuensi tinggi difilter seluruhnya oleh
ZODH, maka
(2.55)
Untuk Ø kecil. Respon frekuensi loop dapat diperkirakan dengan
menggunakan model pada gambar 23, dengan VCO sebagai satu-satunya
komponen lain yang bergantung pada frekuensi di dalam loop. Dalam model ini,
K dibangun berdasarkan perkalian factor Ai phase detektor dengan gain yang
terdapat pada loop. Model ini digunakan untuk menganalisa stabilitas loop dan
karakterstik respon frekuensi pada chapter berikutnya.
2.2.4.8
Perbandingan PD
Penggunaan phase detektor pada penerapannya bergantung pada banyak
factor, termasuk di dalamnya harga, ukuran, kecepatan dan noise. Mixer doublebalanced memiliki performansi noise paling baik dari seluruh jenis PD, namun
hanya mampu menghasilkan tegangan output mendekati 0.5 V. karena
kebanyakan VCO membutuhkan tegangan input sebesar 2 sampai 10 V, PD ini
akan membutuhkan amplifier, namun ini akan memperbesar noise juga yang
menjadikan PD ini bukan pilihan terbaik. PD jenis ini biasanya diterapkan pada
rangkaian yang membutuhkan pulling range VCO yang kecil, seperti ketika
VCXO digunakan. Sample-and-hold discriminator bekerja pada frekuensi 20
sampai 100 KHz, tapi di atas range frekuensi ini akan terdapat terlalu banyak
bocoran harmonisa. Apabila diinginkan kecepatan, biasanya dianjurkan phase
detektor digital dengan menggunakan emitter-coupled logic (ECL).
2.2.5 Voltage-Controlled Oscillator
Voltage-Controlled Oscillator (VCO) merupakan unit non-linear yang
akan membangkitkan suatu sinyal dimana frekuensinya ditentukan oleh besarnya
tegangan control yang dimasukan pada VCO.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
24
Bab II Tinjauan Pustaka dan Landasan Teori
VCO (voltage controlled oscillator) adalah osilator LC yang frekuensinya
bias dikendalikan dari tegangan yang diberikan pada varaktor-nya. Varaktor
adalah dioda yangbila diberi tegangan balik akan menjadi kapasitor, dimana nilai
kapasitansinya
tergantung dari tegangan yang diberikan padanya. Jadi dengan
tegangan pada varaktor, frekuensi VCO akan berubah.
mengubah
Secara garis besar, VCO akan menghasilkan sinyal yang frekuensinya
ditentukan dari bagian LF. Bagian LF mendapat masukan berupa perbedaan fasa
antara sinyal masukan dengan sinyal keluaran PLL.Sehingga akan diperoleh
keluaran yang frekuensinya 'terkunci' terhadap sinyal referensi di bagian
sinyal
masukan.
Sementara itu nilai kapasitansi varaktor (maupun kapasitansi intrinsik
dalam
transistor)
sangat
mudah
dipengaruhi
oleh
suhu.
Inilah
yang
membuat frekuensi VCO mudah berubah (kurang stabil).
PLL mempekerjakan dua jenis osilator itu (kristal dan VCO) sedemikian
rupa sehingga menghasilkan frekuensi output yang stabil dan sekaligus mudah
diubah-ubah (variabel). Caranya adalah dengan membagi frekuensi VCO dan
kemudian membandingkannya dengan frekuensi referensi yang berasal dari
osilator Kristal.
Lebar frekuensi VCO ditentukan oleh karakteristik varaktor yang
digunakan. Nilai kapasitansi varaktor dalam PLL ditentukan oleh tegangan error
yang dihasilkan detektor fasa yang besarnya berkisar antara 0 – 5 volt, mengingat
detektor fasa umumnya dibangun dari TTL (Transitor Transistor Logic) yang
beroperasi pada tegangan 5 volt. Variasi tegangan error ini akan menentukan lebar
frekuensi kerja VCO. Terkadang variasi tegangan 0 – 5 volt sering dirasa kurang.
Untuk mendapatkan variasi tegangan yang lebih lebar (misalnya 0 – 15 Volt)
dibutuhkan sebuah DC Amplifier sehingga akan diperoleh frekuensi kerja VCO
yang lebih lebar.
Rangkaian VCO (Voltage Control Oscillator) atau osilator terkendali
adalah suatu rangkaian yang berfungsi menghasilkan gelombang output AC,
biasanya gelombang kotak atau persegi, dimana frekuensi yang dihasilkan
tergantung kepada tegangan input yang diberikan kepadanya.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
25
Bab II Tinjauan Pustaka dan Landasan Teori
Jika sinyal input lemah, dan terganggu oleh noise, PLL tetap dapat
mengunci sinyal dan menghasilkan sinyal output yang kuat dengan tanpa
mengubah frekuensi. Rasio/perbandingan sinyal terhadap noise sangat diperbesar
karena
PLL juga menyaring noise diluar jangkauan penangkapan. Jika yang
masuk
sinyal termodulasi, maka outputnya akan berupa sinyal kontrol/sinyal
pemodulasi.
Kepentingannya ketika digunakan di dalam PLL. Point-point utama dari
sebuah VCO yang digunakan dalam sistem PLL adalah sebagai berikut.
1. Frequency deviation. Capture range maksimum PLL sama besar dengan
gain loop terbuka, akan menyediakan kemampuan deviasi frekuensi
sebesar ini. Apabila lebih kecil, maka capture range PLL dibatasi oleh
kemampuan maksimum frekuensi deviasi VCO.
2.
Frequency stability. Apabila kestabilan pada frekuensi tinggi diperlukan,
VCXO (Kristal VCO) biasa digunakan. Kestabilan frekuensi adalah
kondisi yang paling penting pada frekuensi synthesizer. Namun VCXO
memiliki deviasi frekuensi yang sempit dan tidak dapat mengikuti sinyal
dengan deviasi frekuensi yang besar/lebar.
3.
Modulation sensitivity. Sensitifitas modulasi Ko harus tinggi. Perubahan
kecil pada tegangan DC akan memberikan perubahan yang cukup besar
pada frekuensi VCO.
4.
Response. VCO harus dapat bereasksi cukup cepat sehingga tidak
memengaruhi karakteristik kestabilan loop. Biasanya, kutub VCO berada
di luar kutub dominan sistem.
5.
Frequency-voltage characteristics. Nilainya harus linear. Toleransi
kelinearitasan bergantung pada penggunaannya. PLL yang dibangun
dengan mikroprosesor dapat menggunakan ADC untuk mengatasi sifat
non-linear VCO.
6.
Spectral purity. Tergantung kepada penggunaannya, output VCO sangat
mendekati sinyal sinus, seperti pada analog frekuensi synthesizer. Pada
penggunaan lain, output VCO dapat berupa rangkaian pulsa kotak.
Sinyal error menyediakan indikasi pada apa yang terjadi dengan fasa input.
Sinyal error ini seharusnya bernilai nol dan untuk mendapatkan nilai nol dapat
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
26
Bab II Tinjauan Pustaka dan Landasan Teori
dilakukan pengubahan fasa sinyal kedua untuk sama dengan sinyal pertama. VCO
yang digunakan untuk menghasilkan dapat digunakan untuk hal ini.
Sesuai dengan namanya, VCO menghasilkan sinyal periodik yang
frekuensinya
berubah-ubah berdasarkan sinyal yang masuk. Apabila sinyal error
bernilai
nol, VCO akan menghasilkan sinyal dengan frekuensi tengah (frekuensi
kerja). Tetapi apabila sinyal error tidak bernilai nol, sinyal output VCO akan
berubah-ubah sesuai dengan perubahan frekuensi yang bekerja pada VCO.
2.2.6 Low Pass Filter
Filter adalah adalah sebuah rangkaian yang dirancang agar melewatkan
suatu
pita frekuensi tertentu dan menghilangkan sinyal lain di luar pita frekuensi
yang diinginkan.Pengertian lain dari filter adalah rangkaian pemilih frekuensi agar
dapat melewatkan frekuensi yang diinginkan dan menahan (couple)/membuang
(bypass) frekuensi lainnya.
Filter yang digunakan dalam rangkaian PLL adalah low pass filter. Low
pass filter (LPF) adalah filter yang melewatkan frekuensi yang berada di bawah
frekuensi cut off. Rangkaian ini memiliki output tegangan DC yang terus naik
sampai ke frekuensi cut off. Bersamaan dengan naiknya frekuensi diatas frekuensi
cut off, tegangan outputnya diperlemah (turun).Pada saat penguatan menurun,
LPF berfungsi sebagai integrator.
Filter pasif terdiri atas resistor, induktor, dan kapasitor. Frekuensi cutoff
(fc) disebut juga frekuensi 0.707, frekuensi 3-dB, frekuensi pojok, atau frekuensi
putus, dari LPF dapat dihitung dengan rumus sebagai berikut :
Fc = ½ phi R C
(2.56)
Low pass filter adalah filter yang melewatkan sinyal dengan frekuensi
rendah dan menghilangkan sinal dengan frekuensi yang lebih tinggi dari frekuensi
cutoff. Filter RC digunakan untuk menghilangkan tegangan sinyal yang memiliki
frekuensi dibawah frekuensi cutoff. Sistem radio menggunakan filter untuk
menghilangkan/mem-blok harmonisa yang menyebabkan terjadi gangguan
komunikasi atau noise.
LPF yang ideal akan menghilangkan seluruh sinyal yang memiliki
frekuensi di atas frekuensi cutoff. Respon frekuensi ini disebut fungsi rectangular.
Daerah transisi tidak didapati pada filter yang ideal. Secara matematis, LPF ideal
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
27
Bab II Tinjauan Pustaka dan Landasan Teori
didapatkan dengan mengalikan sinyal dengan fungsi rectangular pada domain
frekuensi. Namun filter ideal tidak mungkin untuk dibuat.
Bentuk respon LPF seperti ditunjukkan gambar di bawah ini.
Gambar 23. Respon frekuensi dari LPF
Contoh rangkaian LPF :
Gambar 24. Low Pass Filter
Terdapat berbagai macam rangkaian filter dengan respon frekuensi yang
berbeda-beda
pula.
Respon
frekuensi
filter
biasa
ditampilkan
dengan
menggunakan Bode plot dan sebuah filter dibedakan berdasarkan karakteristik
nilai frekuensi cutoffnya. Nilai frekuensi cutoff merupakan nilai frekuensi dimana
filter memotong setengan nilai daya input atau sebesar 3 dB. Orde filter
ditentukan dari jumlah attenuasinya.
2.2.7 Loop Filter
Loop filter yang digunakan adalah Low Pass Filter(LPF), biasanya pada
orde pertama, tetapi filter dengan orde yang lebih tinggi kadang ditambahkan
apabila diinginkan komponen AC pada output phase detektor. Konfigurasi
jaringan tergantung pada apakah output PD dimodelkan sebagai sumber tegangan
(low output impedance) atau sumber arus (high output impedance). Gambar 25a
menunjukkan filter orde pertama yang dapat digunakan dengan output charge
pump.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
28
Bab II Tinjauan Pustaka dan Landasan Teori
Gambar 25(a). Filter orde pertama dengan output charge pump PD
(b). Filter orde pertama dengan output tegangan PD
Tegangan yang diberikan
(2.57)
di mana I(V) adalah amplitudo dari output PD. Gambar 25b menunjukkan sebuah
filter aktif orde pertama, yang dapat digunakan dengan PD low output impedance.
Fungsi transfer
(2.58)
adalah filter orde pertama dengan gain DC
(2.59)
yang dapat diatur sesuai dengan kinerja loop.
2.2.8 Aplikasi Phase Locked-Loop
2.2.8.1
Tracking Filters
PLL dapat mem-filter noise yang terdapat pada sinyal input (referensi).
PLL akan mendeteksi frekuensi input selama perubahan yang terjadi tidak terlalu
cepat. Fungsi transfer PLL adalah LPF kisaran frekuensi VCO, sesuai dengan
frekuensi input. Rangkaian ini bukan merupakan filter linear, karena informasi
pada semua amlplitudo hilang, tetapi rangkaian ini mengurangi fluktuasi frekuensi
input. Ketika loop bekerja, fungsi transfer seperti pada persamaan (2.14)
(biasanya nilai N = 1). Loop akan berfungsi sebagai BPF dengan frekuensi tengah
sama dengan frekuensi refernsi input.
Bandwith loop orde kedua seperti pada persamaan (2.23). dari persamaan
ini dan persamaan (2.17) dapat dilihat bahwa besar bandwith
.
Bandwith loop tertutup berbanding lurus dengan akar dari bandwith loop filter
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
29
Bab II Tinjauan Pustaka dan Landasan Teori
dikali konstan loop gain. Sangat mungkin loop terkunci (lock) pada frekuensi
harmnisa atau sub-harmonisa loop, tergantung pada jenis PD dan VCO yang
digunakan. Sebagai contoh, tipe mixing-PD, PLL akan lock pada frekuensi subharmonisa
ketika output VCO berupa gelombang kotak.
Kemampuan PLL untuk mengatur sendiri frekuensi tengahnya menjadi
sama dengan frekuensi sinyal input menjadikan PLL solusi yang baik dalam
permasalahan modulasi dan demodulasi.
2.2.8.2
Angle Modulation
Sebuah PLL telah menyediakan rata-rata modulasi fasa dan secara tidak
langsung
modulasi frekuensi.Gambar 26 menunjukkan PLL dengan penambahan
sinyal modulasi sebelum LPF.
Gambar 26. PLL dengan sinyal m(t) phase-modulating
Apabila model linear diasumsikan sebagai loop, maka superposisi dapat
digunakan untuk menemukan fasa output.
(2.60)
di mana M(s) adalah transformasi Laplace dari sinyal modulasi m(t). Pada
frekuensi rendah
|
|
*
dan
(2.61)
+
PLL berperan sebagai LPF persamaan (2.61) dapat dipenuhi pada
frekuensi di antara bandwith loop. Pada wilayah frekuensi ini, fasa output
dimodulasi oleh m(t) dan
*
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
+
(2.62)
30
Bab II Tinjauan Pustaka dan Landasan Teori
Apabila fasa input tetap, frekuensi output akan berbanding lurus dengan
derivative sinyal modulasi. Hal ini merupakan acuan sebagai indirect frequency
modulation untuk membedakannya dari direct FM, di mana frekuensinya
proporsional
pada sinyal modulasi.
2.2.8.3
Frequency Demodulation
Demodulator frekuensi yang biasa disebut diskriminator frekuensi adalah
sebuah rangkaian yang secara langsung mengubah variasi frekuensi menjadi
perubahan tegangan secara linear. Terdapat berbagai macam rangkaian yang
digunakan
dalam sistem telekomunikasi seperti konversi FM ke AM,balanced,
phase-shift
discriminator, dan modulator frekuensi Phase Locked-Loop.
Input FM
Phase
Detector
Low Pass
Filter
Sinyal Output
Voltage
Controlled
Oscillator
Gambar 27. Diagram Blok demodulator FM PLL
Apabila PLL lock pada fekuensi input, kontrol tegangan VCO berbanding
lurus dengan pergeserran frekuensi VCO dari frekuensi free-running-nya. Apabila
frekuensi input bergeser, kontrol tegangan akan bergeser pula. Apabila sinyal
input dimodulasi oleh frekuesi modulasi maka VCO akan mendemodulasi output.
PLL dapat digunakan untuk mendeteksi sinyal FM narrowband maupun
wideband (nilai deviasinya tinggi) seperti pada perangkat FM detektor lain.
Apabila tegangan maksimum output PD adalah V V, maka nilai tegangan
maksimum yang dapat diterapkan pada VCO adalah KV V, dimana K adalah gain
DC dari LPF. Maka nilai deviasi frekuensi maksimum VCO adalah
(2.63)
Dengan mengasumsikan VCO linear terhadap range frekuensi. Apabila
output PD dapat menyebar antara ± V V, nilai tracking range (TR) akan menjadi
(2.64)
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
31
Bab II Tinjauan Pustaka dan Landasan Teori
Nilai tracking range harus lebih besar dari deviasi frekuensi sinyal input.
Demodulasi FM didapat dengan mengatur free-running frekuensi dari VCO
menjadi sama dengan frekuensi tengah sinyal input. Metode pendeteksian ini kan
mengasumsikan
selubung gelombang sinyal input mempunyai nilai yang tetap.
Untuk
memastikan nilai amplitudo yang tetap, ditambahkan amplifier dan limiter
pada rangkaian PLL.
Cara kerja sebuah demodulator FM PLL sangat mudah untuk dipahami.
Sinyal input FM dan sinyal output dari VCO diinputkan ke rangkaian phase
detektor.
Output phase detektor kemudian difilter dengan menggunakan sebuah
Low Pass Filter, amplifier, kemudian digunakan untuk mengontrol VCO. Ketika
tidak didapati carrier dari modulasi dan sinyal input FM berada di tengah
bandwith filter (hanya gelombang carrier saja), tegangan VCO akan berada pada
posisi tengah. Ketika terjadi deviasi dalam frekuensi carrier (terdapat modulasi),
frekuensi VCO akan mengikuti sinyal input dalam rangka menjaga loop dalam
kondisi lock. Hasil yang di dapat, nilai tegangan pada VCO berubah-ubah dan
perubahan ini sebanding dengan perubahan carrier yang termodulasi.Tegangan
.yang bervariasi ini kemudian difilter dan diamplifier dalam rangka mendapatkan
sinyal yang terdemodulasi.
Fastaqimah Fii Amrillah (08334008)
Laporan Tugas Akhir 2012
32