Analisa Gaya dalam Keadaan Statis pada Sistem - HFI DIY
advertisement

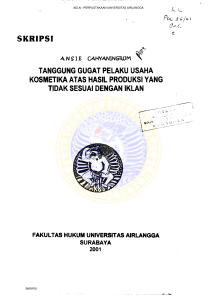
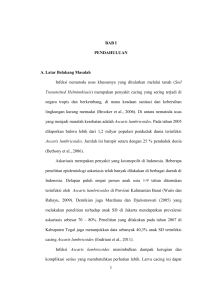
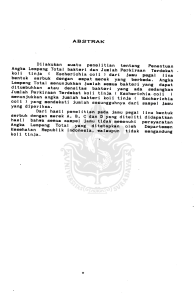
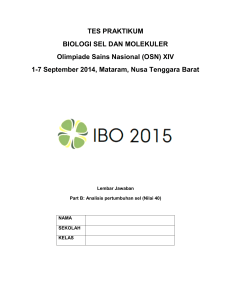
Danil Ilham, dkk / Analisa Gaya dalam Keadaan Statis pada Sistem Muskuloskeletal Tangan-Lengan Manusia 73 Analisa Gaya dalam Keadaan Statis pada Sistem Muskuloskeletal Tangan-Lengan Manusia Danil Ilham dan Yusril Yusuf Laboratoruim Fisika Material Jurusan Fisika FMIPA UGM Sekip Utara Bulaksumur, Yogyakarta-55281 email: [email protected] Abstrak – Sistem muskuloskeletal pada tangan-lengan manusia merupakan suatu sistem mekanik dimana otot berfungsi sebagai penggerak tulang pada sendinya. Dalam keadaan statis terdapat gaya internal dan gaya eksternal yang bekerja pada sistem tersebut. Gaya internal adalah gaya yang bekerja di dalam segmen antara lain gaya berat segmen, gaya otot, dan gaya reaksi sendi. Sedangkan, gaya eksternal adalah gaya yang berasal dari luar segmen seperti gaya berat beban yang diberikan ke dalam sistem. Pada penelitian ini akan dianalisa gaya otot dan gaya reaksi sendi dalam keadaan statis dengan menggunakan prinsip biomekanika dan Hukum Newton. Hasil analisis gaya yang berupa persamaan matematis ditransformasikan dalam bentuk grafik dengan menggunakan program MATLAB. Kata kunci: Sistem muskuloskeletal, statis, biomekanika, Hukum Newton, MATLAB Abstract – Musculoskeletal system of the human hand-arm is a mechanical system in which muscles function as an activator of bone at the joint. In the static state there are internal and external forces acting on the system. Internal forces are the forces acting on the segment between the other segments of gravity, muscle force and joint reaction force. External forces are the forces that comes from outer segments such as gravity loads applied to the system. Muscle Force and joint reaction force in a static state will be analyzed by using the principles of biomechanics and Newton's Laws. The results of the force’s analysis in the form of mathematical equations are transformed to the graph by using MATLAB program. Key words: System musculoskeletal, static, biomechanics, Newton's law, MATLAB I. PENDAHULUAN Dunia robotika telah berkembang sangat pesat terutama perkembangannya pada robot humanoid-form. Robot humanoid-form dapat berlaku seperti manusia, baik lewat interaksi fisik maupun pergerakan [1]. Penelitian-penelitian mengenai robot humanoid-form yang telah dilakukan oleh para ilmuwan umumnya menggunakan sistem motor pada setiap sendi pergerakannya yang mempunyai kelemahan pada sifat fleksibilitas dalam gerakan [1]. Kelemahan tersebut dapat diatasi dengan mengadopsi sistem muskuloskeletal (otot-tulang) pada manusia dengan menggunakan otot buatan yang fleksibilitasnya menyerupai otot manusia [2]. Salah satu penelitian mengenai otot buatan telah dikembangkan oleh Yusril Yusuf dengan teknologi biomimetik yang berbasis pada liquid crystal elastomers (LECs), yaitu satu jenis bahan lunak (soft matters) yang merupakan kombinasi antara polimer dan kristal cair yang bersifat fleksibel [3]. Pada penelitian ini akan dianalisa gaya-gaya dalam keadaan statis pada sistem muskuloskeletal organ gerak tangan-lengan manusia. Hasil dari analisa gaya berupa gaya otot dan gaya reaksi sendi yang selanjutnya menjadi acuan untuk membuat divais aktuator dan produk biomimetik yang berbasis pada LCEs atau bahan polimer lainnya seperti polimer aktif, polimer ionik gel, polimer feroelektrik, polimer konduktif. II. LANDASAN TEORI (JIKA DIPERLUKAN) Ilmu biomekanika menurut Hatze (1974) adalah ilmu yang mempelajari gerakan dari makhluk hidup dengan menggunakan ilmu mekanika. Sedangkan menurut Hay (1985) adalah ilmu yang mempelajari gaya internal dan gaya eksternal yang bekerja pada tubuh manusia serta efek dari gaya tersebut [4]. Gaya-gaya yang bekerja pada sistem organ gerak manusia dalam ilmu biomekanika antara lain gaya gravitasi, gaya reaksi, dan gaya otot [4]. Segmen tangan-lengan manusia tersebut menahan beban dalam keadaan statis mengikuti Hukum Kesetimbangan benda tegar [2]. Statik adalah suatu kondisi benda tegar dalam keadaan setimbang atau tidak ada percepatan yang bekerja pada benda tegar tersebut yang berarti [5], (a) gaya eksternal yang bekerja pada benda tersebut harus nol. 0 (1) (b) momen gaya atau torsi eksternal neto terhadap semua titik harus nol. 0 (2) Gaya dan momen gaya merupakan besaran skalar yang memiliki nilai dan arah, dimana momen gaya adalah hasil kali antara gaya yang disebabkan oleh beban dengan lengan gaya [2]. (3) Prosiding Pertemuan Ilmiah XXVI HFI Jateng & DIY, Purworejo 14 April 2012 ISSN : 0853-0823 744 Danil Ilham, I dkk / An nalisa Gaya dalam m Keadaan Stattis pada Sistem Muskuloskeletal M Tangan-Lengan n Manusia Huukum II New wton menjelasskan bahwa gaya g suatuu bennda berbandinng lurus dengaan percepatann dan massaa b benda tersebuut. (4) A Anatomi adalaah ilmu yang mempelajari struktur tubuhh maanusia [6]. Ilm mu anatomi yang akan diguunakan dalam m pennelitian ini fookus pada seggmen tangan––lengan tubuhh maanusia [7]. Ottot-otot yang terdapat di setiap s segmenn dijeelaskan pada Tabel T 1. IV. HA ASIL DAN PE EMBAHASA AN Dataa antropometri lengan-tanngan yang digunakan d pada penelitian inni menggunnakan data National Aerona autics and Sppace Adminisstration (NAS SA) untuk rata-ratta ukuran priaa Amerika (500th percentile)) umur 40 tahun dengan d tinggii badan 179,99 cm dan berat badan 82,2 kg g [9]. Gaya In nternal pada Tangan-Lenga T an Manusia Hasil analisa gayaa internal dalaam keadaan statis s pada bidang sagittal manuusia diperlihattkan pada Gam mbar 2, 3, dan 4. Tab bel 1. Otot-otott pada segmen tangan-lengan t m manusia. Jangkauan S Segmen Gerak [5] Otot [3] t tubuh [7] Eksstensi Fleksi T Tangan Lengan L b bawah Lengan L a atas Fleksor carpi c radialis Fleksor carpi c ulnaris Palmariss longus Biceps brrachii Brachialis Brachiraadialis Deltoid anterior a Pectoraliis major D Dalam peneliitian ini diguunakan prograam MATLAB B sebbagai kompuutasi persamaaan matematis dari hasil anaalisa gaya padda segmen tanggan-lengan manusia m [8]. P N/EKSPERIMEN IIII. METODE PENELITIA M Metodologi daalam penelitiaan ini meliputii beberapa tahhap, yaitu : 1. Diagram D kerjja untuk sim mulasi gaya pada segmenn t tangan-lengan n manusia, 2. Analisa A gayaa internal daan gaya ekssternal setiapp s segmen tangaan, lengan baw wah dan lengaan atas dengann m menggunakan n hukum kesetimbangan benda tegarr d dalam keadaan statis berdasarkan fuungsi anatom mi t tubuh manusiaa. 3. Hasil H analisaa gaya beruupa persamaaan matematiss s selanjutnya dii-plotting denggan menggunnakan program m M MATLAB verrsi 7.10. Gaambar 1. Diaagram kerja analisa gaya-gaya pada tanganlenngan manusia. Ga ambar 2. Grafikk gaya otot inteernal tangan maanusia. Gambar 3. Grafik gayya otot internal llengan bawah manusia. m Gambar 4. Grafik gayya otot internal llengan atas man nusia. Prosiiding Pertemuan n Ilmiah XXVI HFI H Jateng & DIIY, Purworejo 14 1 April 2012 ISSN N : 0853-0823 Danil Ilham, dkk / Analisa Gaya dalam Keadaan Statis pada Sistem Muskuloskeletal Tangan-Lengan Manusia Otot yang bersifat dominan adalah otot palmaris longus ( ) pada tangan dengan gaya maksimum sebesar 54,33 N (Gb. 2), otot brachialis ( ) pada lengan bawah dengan gaya maksimum sebesar 391,6 N ) pada lengan atas (Gb. 3), otot deltoid anterior ( dengan gaya maksimum sebesar 1,103 10 N (Gb. 4). Gambar-gambar tersebut juga menunjukkan bahwa gaya otot sebanding dengan cosinus sudut tangan ( ). cos Gaya Eksternal (Varisai Sudut) pada Tangan-Lengan Manusia Gaya eksternal dalam penelitian ini berupa sebuah benda dengan massa ( ) 10 kg dengan jarak titik pusat ) pada sendi massa benda dari pusat rotasi ( pergelangan tangan adalah 5,6 cm. Grafik gaya otot yang dominan pada penelitian ini sama dengan grafik pada penelitian untuk gaya internal. Nilai dari gaya otot maksimum pada setiap segmen ) sebesar antara lain : otot palmaris longus ( ) sebesar 7474 N; dan otot 1079 N; otot brachialis ( deltoid anterior ( ) sebesar 2,086 10 N. 75 dengan sudut 149,8 . Dari kedua data tersebut dapat disimpulkan bahwa otot fleksor lengan bawah dapat menahan beban eksternal lebih dari 20 Kg Gambar 6. Grafik sudut lengan bawah terhadap beban eksternal. Gaya Eksternal (Varisai Massa) pada Tangan-Lengan Manusia Variasi massa benda sebagai gaya eksternal diberikan setiap 1 Kg dari massa beban 1 Kg sampai dengan 20 Kg, dimana jarak titik pusat massa benda dari pusat ) adalah 5,6 cm. rotasi sendi pergelangan tangan ( Hasil analisa gaya eksternal pada setiap segmen diperlihatkan pada Gambar 5, 6 dan 7. Gambar 7. Grafik sudut lengan atas terhadap beban eksternal. Gambar 7 menunjukkan bahwa segmen lengan bawah membentuk sudut 0 pada beban eksternal 1 Kg sampai dengan 7 Kg dan sudut 32,08 pada beban eksternal 20 Kg. Data referensi [9] menunjukkan lengan atas dapat ber-fleksi sampai dengan sudut 187,6 . Dari kedua data tersebut dapat disimpulkan bahwa otot fleksor lengan atas dapat menahan beban eksternal lebih dari 20 Kg. Gambar 5. Grafik sudut tangan terhadap beban eksternal. Pada Gambar 5, tangan membentuk sudut 77,91 pada beban eksternal 2 Kg dan sudut 81,36 pada beban eksternal 3 Kg. Data referensi [9] menunjukkan tangan dapat ber-fleksi sampai dengan sudut 78,15 . Dari kedua data tersebut dapat disimpulkan bahwa otot fleksor tangan dapat menahan beban eksternal maksimal sebesar 2 Kg. Berdasarkan Gambar 6, lengan bawah membentuk sudut 21,01 pada beban eksternal 1 Kg dan sudut 66,65 pada beban eksternal 20 Kg. Data referensi [9] menunjukkan lengan bawah dapat ber-fleksi sampai V. KESIMPULAN Dari penelitian yang telah dilakukan dapat disimpulkan bahwa prinsip biomekanika dan Hukum Newton dapat digunakan dalam analisa gaya pada sistem muskuloskeletal tangan-lengan manusia dalam keadaan statis. Hasil analisa gaya pada setiap segmen sistem antara lain : 1. Pada segmen tangan, gaya otot bernilai maksimum 0 dimana tanpa beban saat 32,6 N, 32,6 N dan setelah 54,33 N, 1079 N, 647,6 N, diberikan beban 647,6 N. 2. Pada segmen lengan bawah, gaya otot bernilai maksimum saat 1 dimana tanpa beban 391,6 N, 275,5 N, 240,9 N dan Prosiding Pertemuan Ilmiah XXVI HFI Jateng & DIY, Purworejo 14 April 2012 ISSN : 0853-0823 76 Danil Ilham, dkk / Analisa Gaya dalam Keadaan Statis pada Sistem Muskuloskeletal Tangan-Lengan Manusia setelah diberikan beban 7474 N, 4601 N. 5258 N, 3. Pada segmen lengan atas, gaya otot bernilai maksimum tanpa beban saat 4 sebesar 1,103 10 N, 9191 N dan setelah 3 yaitu diberikan beban saat 1,739 10 N. 2,086 10 N, UCAPAN TERIMA KASIH Terimakasih kepada Ibu Rini Darmastiti atas bantuannya mengenai pengetahuan dalam bidang ergonomi, sehingga diperoleh gambaran lengkap mengenai antropometri tubuh manusia. PUSTAKA [1] Y. P. Cohen, Biomimetics-biologically inspired technologies, CRC Press, California, 2006. [2] M. Nordin, dan V. H. Frankel, Basic biomechanics of the musculoskeletal system, Lippincot Williams and Wilkins, New York, 2007. [3] Y. Yusuf, Swelling dynamics and electromechanical effects of liquid crystal elastomers as artificial muscles, Dr. thesis, Kyushu University, Fukuoka, 2005. [4] D. A. Winter, Biomechanic and motorcontrol of human movement, Wiley, New York, 1990. [5] P. A. Tipler, Physics for science and engineer, Worth Publisher Inc., California, 1991. [6] C. G. Young, dan J. D. Barber, Medical terminology-step by step, W. B. Saunders Co., Philadelphia, 1962. [7] D. Ilham, Analisa gaya dalam keadaan statis dan simulasi gerak pada tangan-lengan manusia, S.Si. skripsi, Laboratorium Fisika Material Jurusan Fisika FMIPAUGM, Yogyakarta, 2011. [8] K. Peranginangun, Pengenalan MATLAB, Penerbit Andi, Yogyakarta, 2006. [9] W. Thornton, dan J. Jackson, Anthropometric study of astronaut candidates, NASA-JSC, 1979 to 1980, Figure 3, pp. 711-713. TANYA JAWAB Kamsul Abraha, FMIPA UGM ? Apakah pemodalan sudah diperhitungkan sifat mekanik elestik ketiga bagian tangan lengan manusianya? Danil Ilham, FMIPA UGM √ Belum, karena pemodalan dari ketiga bagian tangan lengan manusia terjadi dalam keadaan statis sehingga sifat mekanik hanya dapat dilihat pada perubahan gaya masing-masing otot setiap perubahan posisi segmen tubuh. Diperlukan lagi penelitian selanjutnya untuk gerakan dinamis agar gerak mekanik elastik dapat diamatai lebih rinci. Prosiding Pertemuan Ilmiah XXVI HFI Jateng & DIY, Purworejo 14 April 2012 ISSN : 0853-0823