analisis model denyut jantung dengan menggunakan teori bifurkasi
advertisement

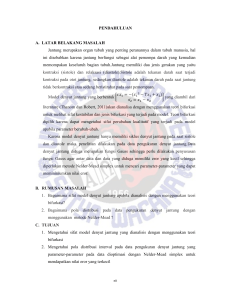
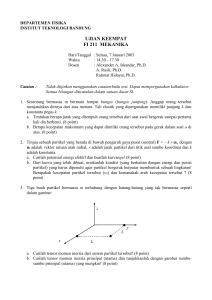
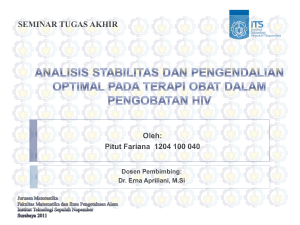
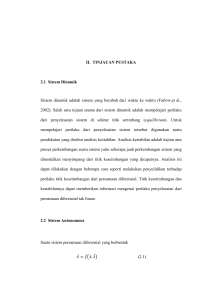
ANALISIS MODEL DENYUT JANTUNG DENGAN MENGGUNAKAN TEORI BIFURKASI Herlina D. Tendean1), Hanna A. Parhusip2), Bambang Susanto2) 1) Mahasiswa Program Studi Matematika FSM UKSW 2) Dosen Program Studi Matematika FSM UKSW Fakultas Sains dan Matematika UKSW Jl. Diponegoro 52-60 Salatiga 50711 1) [email protected], 2) [email protected], 2) [email protected] Abstrak Model denyut jantung manusia yang berbentuk 𝜀𝑥1 = −(𝑥1 3 − 𝑇𝑥1 + 𝑥2 ) dianalisa dengan menggunakan teori 𝑥2 = 𝑥1 − 𝑥𝑑 bifurkasi karena variasi parameter dalam model yang dapat menyebabkan perubahan sifat kualitatif titik setimbang. Model tersebut merupakan model tak linier maka model akan dilinierkan dengan mengunakan linierisasi deret Taylor. Untuk melihat perbandingan antara model linier dan tak linier yang sesuai dengan sistem kerja jantung manusia, maka kedua model diselesaikan dengan menggunakan metode Runge-Kutta orde 4. Model linier tidak sesuai dengan sistem kerja jantung manusia karena dalam model linier tidak terjadi proses sistole dan diastole, sehingga model tak linier lebih valid karena sesuai dengan sistem kerja jantung manusia. Solusi yang didapatkan dari model tak linier merupakan bifurkasi homoklinik yang terjadi karena adanya siklus periodik dan sifat stabilitas titik setimbang cenderung tidak stabil. Kata kunci : Jantung, Bifurkasi Homoklinik, Titik Setimbang. Pendahuluan Pada proses pemompaan darah pada jantung memiliki dua jenis gerakan yang disebut kontraksi (sistole) dan relaksasi (diastole). Sistole adalah gerakan jantung pada saat tekanan darah terjadi kontraksi pada otot-otot jantung, sedangkan diastole adalah gerakan jantung pada saat jantung beristirahat pada saat pemompaan . Denyut jantung terjadi pada saat jantung berada dalam kondisi sistole dan diastole yang terjadi berulang-ulang. Salah satu alat yang dapat digunakan untuk mengukur denyut jantung manusia adalah Electrodiagram (ECG). ECG menampilkan grafik yang merekam aktifitas kelistrikan jantung pada selang waktu tertentu, grafik yang muncul dari hasil pemeriksaan berupa grafik naik dan turun yang dapat disebut sebagai gelombang (Shyu dan Weichih, 2007). Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. Model denyut jantung manusia harus memiliki 3 siklus dasar (Jones dan Sleeman,1983) : 1. Model yang dibuat harus berdasarkan keadaan setimbang dengan laju perubahan panjang serabut otot dan gelombang aktifitas elektrokimia sama dengan nol 2. Terdapat ambang batas yang memicu gelombang elektrokimia yang menyebabkan jantung berkontraksi 3. Model diharapkan dapat cepat kembali dalam keadaan setimbang Model denyut jantung yang diteliti dalam paper ini berbentuk (Thanom dan Robert, 2011): 𝜀𝑥1 = −(𝑥1 3 − 𝑇𝑥1 + 𝑥2 ) 𝑇>0 (1) 𝑥2 = 𝑥1 − 𝑥𝑑 (2) dengan 𝑥1 : Panjang serabut otot 𝑥2 : Variabel aktifitas elektrokimia 𝜀 : Konstanta parameter bernilai positif kecil yang berhubungan dengan nilai eigen 𝑥𝑑 : Skalar kuantitas yang mewakili panjang serat otot dalam keadaan diastole 𝑇 : Ketegangan dalam otot. Pada literatur nilai parameter yang diketahui adalah 𝑥𝑑 = 0, 𝜀 = 0.2 dan 𝑇 = 1. Persamaan (1) dan (2) merupakan sistem persamaan yang memiliki bentuk umum 𝑑𝑥 𝑑𝑡 = 𝑓 (𝑥, 𝑡), persamaan (1) dan (2) akan dianalisis dengan menggunakan teori bifurkasi. Model dianalisis dengan menggunakan teori bifurkasi diharapkan dapat menunjukan sifat sistem kerja jantung apabila parameter berubah-ubah. Teori Bifurkasi Bifurkasi adalah perubahan sifat kualitatif titik setimbang dari sistem persamaan diferensial 𝑑𝑥 𝑑𝑡 = 𝑓 (𝑥, 𝑡) yang terjadi karena variasi parameter. Titik setimbang adalah solusi 𝑥 = 𝑥 ∗ yang menyebabkan 𝑑𝑥 𝑑𝑡 = 0. Terdapat 3 jenis bifurkasi yang dapat digambarkan dari sebuah persamaan diferensial (Golubitsky dan Dellnitz,1999) : Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. 1. Bifurkasi pelana (saddle node bifurcation) yaitu dimana titik setimbang 𝑥 ∗ bertabrakan dan menghilang. Bifurkasi pelana diperoleh dengan mendeteksi : det (𝐽𝑓 ) = 0 , (𝑡𝑟(𝐽𝑓 ) ≠ 0) 𝑥 ,𝑡 dengan 𝐽𝑓 adalah matriks Jacobian dari sistem persamaan diferensial. Matriks Jacobian dibentuk dari turunan parsial dari sistem persamaan diferensial dari 𝑓𝑖 (𝑥, 𝑡) terhadap 𝑥𝑗 , dengan 𝑗 = 1, … , 𝑛 dan 𝑖 = 1, … , 𝑛. Berdasarkan komponennya, 𝐽𝑓 ditulis 𝜕𝑓1 𝐽𝑓 = 𝜕𝑥 1 ⋮ 𝜕𝑓𝑛 𝜕𝑥 1 ⋯ ⋱ … 𝜕𝑓1 𝜕𝑥 𝑛 ⋮ . 𝜕𝑓𝑛 (3) 𝜕𝑥 𝑛 2. Bifurkasi hopf yaitu berubahnya jenis kestabilan titik setimbang persamaan diferensial, yang terjadi karena munculnya sepasang nilai eigen dari matriks Jacobian yang bernilai imajiner. Bifurkasi hopf dapat diperoleh jika sistem persamaan diferensial memenuhi : det (𝐽𝑓 ) 𝑥 ,𝑡 > 0 , (𝑡𝑟 𝐽𝑓 = 0) Nilai eigen disini adalah nilai skalar 𝜆 yang memenuhi persamaan 𝐴𝑥 = 𝜆𝑥. (4) Matriks A adalah matriks Jacobian dari persamaan diferensial yang dihitung pada titik setimbangnya. Sehingga nilai eigen pada matriks Jacobian dicari dengan menyelesaikan (Mahmud, 2009) det 𝐴 − 𝜆Ι = 0 (5) 3. Bifurkasi homoklinik yaitu adanya siklus periodik pada suatu persamaan diferensial, yang muncul karena sepasang nilai eigen (5) dari matriks Jacobian tidak sama dengan nol (Maoan dkk, 2012). Bifurkasi homoklinik dapat dideteksi jika persamaan diferensial memenuhi : det (𝐽𝑓 ) 𝑥 ,𝑡 > 0 , (𝑡𝑟 𝐽𝑓 ≠ 0) Untuk menentukan sifat stabilitas titik setimbang maka sistem persamaan diferensial tak linier perlu diketahui sifat nilai eigen dari matriks Jacobian yaitu matriks pada persamaan (3). Menurut (Golubitsky dan Dellnitz,1999) Titik setimbang untuk kasus bifurkasi dibedakan menjadi 2 bagian : Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. 1. Titik setimbang hiperbolik (jika bagian riil pada nilai eigen dari matriks Jacobian pada titik setimbang tidak nol). 2. Titik setimbang non hiperbolik (jika bagian riil pada nilai eigen dari matriks Jacobian pada titik setimbang bernilai nol). Sifat kestabilan untuk titik setimbang hiperbolik dibagi berdasarkan jenis dan tanda dari nilai eigen. Beberapa sifat kestabilan titik setimbang (Golubitsky dan Dellnitz,1999) : 1. Jika semua nilai eigen riil dan mempunyai tanda sama, stabil apabila nilai eigen positif dan tidak stabil apabila nilai eigen negatif. 2. Jika semua nilai eigen riil dan berbeda tanda (positif dan negatif) maka jenis kestabilan adalah pelana (saddle) dan selalu tak stabil. 3. Jika salah satu nilai eigen riil dan nilai eigen kompleks yang semua nilai eigen bernilai negatif maka jenis kestabilan adalah stabil, tetapi apabila semua nilai eigen bertanda positif maka jenis kestabilan adalah tak stabil. Jenis kestabilan ini disebut fokus titik (focus node). 4. Jika salah satu nilai eigen riil dengan tanda yang berlawanan dari nilai eigen yang kompleks, maka jenis kestabilannya disebut titik pelana fokus (saddle focus), titik setimbang ini selalu tidak stabil. Karena model 1 yang digunakan bersifat tak linier maka sebagai langkah awal model dilinierkan dengan deret Taylor di sekitar titik setimbang 𝑥 ∗ . Linierisasi sistem persamaan tak linier dengan menggunakan Deret Taylor Linierisasi didasarkan dari fungsi 𝑓 (𝑥) yang terletak dekat dengan titik setimbang, dengan 𝑓 𝑥 ∗ = 0 yang kemudian disusun sistem persamaan pada sekitar titik setimbang 𝑥 ∗ . 𝑑𝑥 𝑑𝑡 = 𝑓 (𝑥) = 𝑓 (𝑥 ∗ ) + 𝐽𝑓 𝑥∗ (𝑥 − 𝑥 ∗ ) + ⋯ (6) Dari persamaan (6) selanjutnya yang lebih tinggi dbuang, sehingga persamaan menjadi 𝑑𝑥 𝑑𝑡 = 𝑑𝑥 1 𝜕𝑓1 𝑑𝑡 𝜕𝑥 1 ⋮ 𝑑𝑥 𝑛 𝑑𝑡 = ⋮ 𝜕𝑓𝑛 𝜕𝑥 1 … ⋱ ⋯ 𝜕𝑓1 𝜕𝑥 𝑛 ⋮ 𝜕𝑓𝑛 𝜕𝑥 𝑛 𝑥1 − 𝑥1∗ ⋮ 𝑥𝑛 − 𝑥𝑛∗ (7) Persamaan (7) merupakan model sistem persamaan linier yang berada di sekitar titik setimbang 𝑥 ∗ . Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. Metode Runge-Kutta orde 4 untuk model denyut jantung persamaan (1) dan (2) Untuk menyelesaikan sistem persamaan diferensial tak linier pada persamaan (1) dan (2) dapat digunakan metode Runge-Kutta (Yang dkk, 2005) dengan tujuan membawa model kedalam fungsi waktu (𝑡). Penyelesaian 𝑑𝑥 𝑑𝑡 = 𝑓(𝑥, 𝑡) menurut metode Runge-Kutta Orde 4 adalah ℎ 𝑥 𝑛+1 = 𝑥 𝑛 + (𝑘1 + 2𝑘2 + 2𝑘3 + 𝑘4 ) 6 dengan 𝑘1 = 𝑓(𝑥 𝑛 , 𝑡 𝑛 ) 1 1 𝑘2 = 𝑓(𝑥 𝑛 + ℎ𝑘1 , 𝑡 𝑛 + ℎ) 2 2 1 1 𝑘3 = 𝑓 (𝑥 𝑛 + ℎ𝑘2 , 𝑡 𝑛 + ℎ) 2 2 𝑛 𝑛 𝑘4 = 𝑓(𝑥 + ℎ𝑘3 , 𝑡 ) Persamaan (1) dan (2) merupakan sistem persamaan tak linier dan akan dibawa kedalam fungsi waktu (𝑡) dengan menggunakan metode Runge-Kutta orde 4, persamaan (1) dan (2) mempunyai penyelesaian ℎ 𝑥 𝑛+1 = 𝑥 𝑛 + (𝑘1 + 2𝑘2 + 2𝑘3 + 𝑘4 ) 6 dengan 1 𝑘 − ( 𝑥1 𝑛 3 − 𝑇𝑥1 𝑛 + 𝑥2 𝑛 ) = 11 𝜀 𝑘12 𝑛 𝑥1 − 𝑥𝑑 1 ℎ ℎ ℎ − ((𝑥1 𝑛 + 𝑘11 )3 − 𝑇 𝑥1 𝑛 + 𝑘11 + (𝑥2 𝑛 + 𝑘12 )) 𝑘 𝜀 2 2 2 𝑘2 = = 21 ℎ 𝑘22 𝑛 (𝑥1 + 𝑘11 ) + 𝑥𝑑 2 1 ℎ ℎ ℎ − ((𝑥1 𝑛 + 𝑘21 )3 − 𝑇 𝑥1 𝑛 + 𝑘21 + (𝑥2 𝑛 + 𝑘22 )) 𝑘 𝜀 2 2 2 𝑘3 = = 31 ℎ 𝑘32 (𝑥1 𝑛 + 𝑘21 ) + 𝑥𝑑 2 1 𝑘 − ( 𝑥1 𝑛 + ℎ𝑘31 3 − 𝑇 𝑥1 𝑛 + ℎ𝑘31 + (𝑥2 𝑛 + ℎ𝑘32 )) 𝑘4 = = 41 𝜀 𝑘42 𝑛 𝑥1 + ℎ𝑘31 + 𝑥𝑑 𝑘1 = Pembahasan Analisa model denyut jantung manusia Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. Dalam penilitian ini persamaan (1) dan (2) akan dicari nilai titik setimbangnya untuk mengetahui sifat stabilitas titik setimbang 𝑥 ∗ . Secara analitik didapatkan nilai titik setimbang 𝑥1 ∗ = 𝑥𝑑 1 𝑥2 ∗ = − (𝑥𝑑 − 𝑥𝑑 ) 𝜀 1 ∗ Sehingga titik setimbang 𝑥1 , 𝑥2 ∗ adalah (𝑥𝑑 , − 𝜀 (𝑥𝑑 3 − 𝑇𝑥𝑑 )). Titik setimbang tergantung pada parameter 𝜀, 𝑇 dan 𝑥𝑑 . Berdasarkan titik setimbang pada persamaan (1) dan (2) merupakan bifurkasi homoklinik karena siklus periodik dapat muncul dan menghilang jika parameter divariasi. Pada gambar 1 𝑥𝑑 divariasi −0.5 ≤ 𝑥𝑑 ≤ 0.5, jika 𝑥𝑑 > 0.5 dan 𝑥𝑑 < −0.5 maka tidak akan terjadi siklus periodik. xd = - 0.5 E = 0.2 T=1 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E xd = 0 E = 0.2 T=1 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 3 2 2 2 1 1 1 0 x1 3 x1 x1 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 3 0 -1 -1 -2 -2 -2 -3 -3 -2 -1 0 x2 1 2 3 E = 0.2 T=1 0 -1 -3 xd = 0.5 -3 -3 -2 -1 0 x2 1 2 3 -3 -2 -1 0 x2 1 2 3 Gambar 1. Siklus periodik yang terjadi untuk 𝑥𝑑 = −0.5 (kiri), 𝑥𝑑 = 0 (tengah) dan 𝑥𝑑 = 0.5 (kanan). Menentukan sifat stabilitas titik setimbang berdasarkan variansi parameter Untuk menentukan sifat stabilitas titik setimbang persamaan (1) dan (2) maka dicari nilai eigen dengan membentuk matriks Jacobian sesuai dengan persamaan (3) 𝜕𝑓1 𝜕𝑥1 𝐽𝑓 = 𝜕𝑓2 𝜕𝑥1 𝜕𝑓1 1 1 2 𝜕𝑥2 = − 𝜀 (3𝑥1 − 𝑇) − 𝜀 𝜕𝑓2 1 0 𝜕𝑥2 Nilai eigen 𝐽𝑓 dengan parameter yang telah diketahui 𝜆1 = 3.62 dan 𝜆2 = 1.38, jadi sifat kestabilan titik setimbang adalah tidak stabil karena nilai eigennya real dan bertanda positif dengan tipe titik setimbang hiperbolik. Sifat kestabilan berdasarkan nilai eigen dengan memvariasi parameter 𝜀, 𝑥𝑑 dan 𝑇 ditunjukan pada table 1. 1. Parameter 𝜀 yang divariasi Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. Tabel 1. Nilai eige, determinan dan trace dari matriks Jacobian untuk beberapa variasi parameter 𝜀 `1 Nilai Parameter 𝜀 = 0.19 𝑇=1 𝑥𝑑 = 0 Nilai Eigen 𝜆1 = 3.9208 𝜆2 = 1.3424 Det /Trace 5.2632 5.2632 Matriks Jacobian 5.2632 1 Gambar pplane7 −5.2632 0 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E xd = 0 E = 0.19 T=1 3 2 1 x1 No 0 -1 -2 -3 -3 𝜀 = 0.05 𝑇=1 𝑥𝑑 = 0 𝜆1 = 18.9443 𝜆2 = 1.0557 20 20 20 1 −20 0 -1 0 x2 1 2 3 xd = 0 E = 0.05 T=1 3 2 1 x1 2 -2 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 0 -1 -2 -3 -3 𝜀 = 0.25 𝑇=1 𝑥𝑑 = 0 𝜆1 = 2 𝜆2 = 2 4 4 4 1 −4 0 -1 0 x2 1 2 3 xd = 0 E = 0.25 T=1 3 2 1 x1 3 -2 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 0 -1 -2 -3 -3 𝜀 = 0.256 𝑇=1 𝑥𝑑 = 0 𝜆1 = 1.96 + 0.29i 𝜆2 = 1.96 − 0.29i 3.9063 3.9063 3.9063 1 − 3.9063 0 1 2 xd = 0 3 E = 0.256 T=1 1 0 -1 -2 𝜆1 = 1.67 + 0.75i 𝜆2 = 1.67 − 0.75i -3 -3 3.3333 3.3333 3.3333 1 −3.3333 0 -2 -1 0 x2 1 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 2 xd = 0 3 E = 0.3 T=1 3 2 1 x1 𝜀 = 0.3 𝑇=1 𝑥𝑑 = 0 0 x2 2 (pelana) 5 -1 3 x1 4 -2 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E 0 -1 (pelana) -2 -3 -3 -2 -1 0 x2 1 2 Setelah memvariasi parameter 𝜀 dapat terlihat nilai eigen selalu positif dan sifat kestabilan titik setimbang akan terjadi tidak stabil apabila 𝜀 ≤ 0.25 dan sifat kestabilan pelana fokus terjadi apabila nilai 𝜀 > 0.25. Dapat dikatakan bahwa sifat titik setimbang dengan memvariasi parameter 𝜀 adalah pelana fokus dan tidak stabil. 2. Apabila parameter −0.5 ≤ 𝑥𝑑 < 0 atau 0.5 ≥ 𝑥𝑑 > 0 maka sifat kestabilan titik setimbang tidak stabil dan pelana fokus dan apabila 𝑥𝑑 = 0 sifat kestabilan titik setimbang tidak stabil. 3. Parameter 𝑇 divariansi 𝑇 ≥ 1 maka sifat kestabilan titik setimbang tidak stabil Setelah melakukan variansi parameter 𝜀, 𝑥𝑑 dan 𝑇 persamaan(1) dan (2) merupakan bifurkasi homoklinik karena persamaan (1) dan (2) memiliki siklus periodik. Dengan menggunakan bantuan pplane7 maka akan terlihat siklus yang terjadi pada persamaan (1) dan (2) dalam bidang fase. Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. 3 x2 ' = x1 - xd x1 ' = - (x13 - T x1 + x2)/E T=1 E = 0.2 xd = 0 3 A 2 x1(panjang seraut otot) B 1 0 -1 D C -2 -3 -3 -2 -1 0 1 x2 (variabel aktifitas elektrokimia) 2 3 Gambar 2. 𝑥1 = panjang serat otot, 𝑥2 = Variabel aktifitas elektrokimia dimana 𝑥𝑑 = 0, 𝜀 = 0.2 dan 𝑇 = 1. Gambar 2 menunjukan bahwa medan vektor dalam garis AB dan BC berjalan menuju garis B dan C yang membentuk siklus. Titik-titik AB dan BC merupakan titik setimbang yang stabil sedangkan titik yang berada disekitar garis BC merupakan titik setimbang yang tidak stabil disebabkan pada garis B dan C merupakan ambang batas yang menyebabkan jantung berkontraksi (Thanom dan Robert, 2011). Titik setimbang dikatakan tidak stabil karena jantung merupakan organ tubuh yang tidak berhenti beraktifitas sehingga dapat dikatakan bahwa jantung tidak pernah berada pada kondisi yang stabil. Linierisasi sistem persamaan tak linier Melinierkan sistem persamaan tak linier diharapkan persamaan yang linier lebih mendekati sistem kerja jantung. Pada persamaan (1) dan (2) akan disusun persamaan disekitar titik setimbang 𝑥1 ∗ dan 𝑥2 ∗ 𝑑𝑥1 = 𝑓1 𝑥1 , 𝑥2 = 𝑓1 𝑥1 ∗ , 𝑥2 ∗ + 𝐽𝑓 𝑑𝑡 𝑑𝑥2 = 𝑓2 𝑥1 , 𝑥2 = 𝑓2 𝑥1 ∗ , 𝑥2 ∗ + 𝐽𝑓 𝑑𝑡 (𝑥 1 ∗ ,𝑥 2 ∗ ) 𝑥 1 ∗ ,𝑥 2 ∗ ) 𝑥1 − 𝑥1 ∗ + 𝐽𝑓 𝑥1 − 𝑥1 ∗ + 𝐽𝑓 (𝑥 1 ∗ ,𝑥 2 ∗ ) (𝑥 1 ∗ ,𝑥 2 ∗ ) 𝑥2 − 𝑥2 ∗ 𝑥2 − 𝑥2 ∗ Linierisasi persamaan (1) dan (2) disekitar titik setimbang 𝑥1 ∗ dan 𝑥2 ∗ 𝑑𝑥1 −3𝑥1 2 + 𝑇 𝑑𝑡 = 𝜀 𝑑𝑥2 1 𝑑𝑡 1 𝑥 −𝑥 ∗ −3𝑥1 2 + 𝑇 1 1 𝜀 𝑥2 − 𝑥2 ∗ = 𝜀 0 1 − 𝑥1 − 𝑥𝑑 1 3 (−𝑥 𝑑 + 𝑇𝑥𝑑 ) 𝜀 𝑥2 − 𝜀 0 − Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. 𝑑𝑥 1 𝑑𝑡 𝑑𝑥 2 −3𝑥 1 2 +𝑇 = 𝜀 𝑑𝑡 1 𝑥1 − 𝑥𝑑 + 𝑥2 − 𝜀 𝑥1 − 𝑥𝑑 (−𝑥 𝑑 3 +𝑇𝑥 𝑑 ) (8) 𝜀 Persamaan (8) adalah hasil linierisasi persamaan (1) dan (2). Metode Runge-Kutta orde 4 Hasil Metode Runge-Kutta orde 4 akan diaplikasikan pada persaman (1) dan (2) dengan dibantu Matlab R2009a, dengan titik awal yang dipilih adalah 0.35 dan 0.35. 2 x1 1 0 -1 -2 0 5 10 0 5 10 15 20 25 15 20 25 1 x2 0.5 0 -0.5 -1 t Gambar 3. Gambar dari persamaan (1) dan (2) dengan 𝜀 = 0.2, 𝑇 = 1 dan 𝑥𝑑 = 0 Gambar 3 merupakan gambar pada persamaan (1) dan (2) yang dibawa dalam fungsi 𝑡 dengan titik awal yang dipilih adalah pada saat 𝑥1 𝑡 = −0.35 dan 𝑥2 𝑡 = 0.35, titik awal dipilih berdasarkan perpotongan antara AB dan BC pada gambar 2. Pada gambar 3 menjelaskan 𝑥1 adalah panjang serabut otot dan 𝑥2 adalah variabel aktifitas elektrokimia, pada saat 𝑥1 = 5 dan 𝑥2 = 5 terlihat pada garis putus-putus yaitu pada saat jantung dalam keadaan diastole maka panjang serabut otot semakin melebar dan aktifitas elektrokimia akan semakin mengecil karena tidak terjadi kontraksi pada otot jantung, tetapi pada garis yang tidak putus-putus yaitu pada saat jantung dalam keadaan sistole maka panjang serabut otot akan semakin mengecil dan variabel aktifitas elektrokimia semakin membesar karena terjadi kontraksi dalam jantung yang dapat menghasilkan listrik didalam jantung. Dengan menggunakan metode Runge-Kutta orde 4 persamaan (8) disusun seperti persamaan yang tak linier dan dibawa ke dalam fungsi waktu (𝑡) untuk Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. melihat kedekatan antara model yang linier dengan sistem kerja jantung. Dengan menggunakan bantuan Matlab R2009a maka persamaan (1),(2) dan (8) diaplikasikan dengan menggunakan metode Runge-Kutta orde 4 yang ditunjukan pada gambar 4. 4 Linier x1 2 0 -2 Tak linier 0 5 10 15 20 25 15 20 25 60 x2 40 Linier 20 0 Tak Linier -20 0 5 10 t Gambar 4. Gambar dari persamaan (1), (2) dan (8) Pada gambar 4 terlihat bahwa sistem persamaan yang telah dilinierkan tidak sesuai dengan keadaan jantung manusia, karena keadaan panjang serabut otot dan variabel aktifitas elektrokimia semakin meningkat dan terlihat bahwa jantung tidak mengalami proses sistole dan diastole. Dimensi Analisis untuk Persamaan (1) dan (2) Model pada persamaan (1) dan (2) merupakan model yang tak berdimensi sehingga pada kasus ini akan dilakukan analisis untuk menjadikan model yang tak berdimensi menjadi berdimensi. Misalkan berdasarkan dari literatur diberikan dimensi pada setiap variabel : 𝑥1 = panjang serabut otot (meter) 𝑥2 = aktivitas variabel elektrokimia (tegangan listrik = Volt) 𝑇 = Tegangan (Pascal atau Newton/meter2 ) 𝑥𝑑 = Skalar kuantitas yang mewakili panjang serat otot dalam keadaan diastole (meter) 𝑡 = waktu (detik) Untuk mendapatkan informasi tentang satuan pada parameter pada persamaan (1) dan (2) tersebut maka perlu dilakukan terlebih dahulu analisa dimensi sebagaimana ditunjukkan berikut ini. Model ditulis dalam bentuk 𝑥1 = −𝑏𝑥1 3 + 𝑐𝑇𝑥1 − 𝑑𝑥2 (9) Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. 𝑥2 = 𝑒(𝑥1 − 𝑥𝑑 ), 𝑏, 𝑐, 𝑑, 𝑒, 𝑇 > 0 (10) Penyekalaan umum yang dapat digunakan adalah 𝑥1 = 𝑥1 , 𝐴 𝑥2 = 𝑥2 , 𝐵 𝑡 𝑡=𝜏. (11) dengan A, B dan 𝜏 merupakan skala referensi untuk panjang serabut otot, tegangan listrik dan waktu. Skala referensi adalah nilai-nilai panjang serabut otot, tegangan listrik dan waktu yang biasa digunakan pada saat pengukuran jantung. Misalkan A adalah panjang serabut otot jantung dalam keadaan normal bagi orang sehat ketika jantung berkontraksi dalam satuan meter, B adalah tegangan listrik yang terjadi dalam jantung pada saat berkontranksi dalam satuan volt dan 𝜏 adalah waktu yang digunakan pada saat jantung mengalami sistole dan diastole dalam satuan detik. Dengan menggunakan penyekalaan umum (11) pada persamaan (9) dan (10) diperoleh 𝐴 𝑥 𝜏 1 𝐵 𝑥 𝜏 2 = −𝑏𝐴3 𝑥1 3 + 𝑐𝑇𝐴𝑥1 − 𝑑𝐵𝑥2 (12) = 𝑒𝐴(𝑥1 − 𝑥𝑑 ) (13) selanjutnya perlu dicari 𝑏, 𝑐, 𝑑 dan 𝑒 dengan 𝐵 𝐵 𝑐𝐴 𝑐 𝜏 = 𝑒𝐴 , sehingga 𝜏 = 𝑒𝐴 = 𝑒𝐴𝑑 = 𝑒𝑑 𝐴 𝑏𝐴3 3 𝑑𝐵 𝑥1 = − 𝑥1 + 𝑇𝑥1 − 𝑥 𝑐𝐴𝜏 𝑐𝐴 𝑐𝐴 2 𝐴 𝑐𝐴𝜏 1 adalah 𝜀 pada persamaan (1) yang sehingga dapat menjadi 𝜀 = 𝑐𝜏 .Ekspresi dapat disederhanakan menjadi 𝐴= 𝑐 𝑏 . Selanjutnya 𝑑𝐵 𝑐𝐴 𝑏𝐴 2 𝑐 = 1 jadi 𝐵 = 𝑏𝐴 3 𝑐𝐴 𝑐 = 1 sehingga menyebabkan 𝐴2 = 𝑏 jadi 𝑐𝐴 𝑑 = 𝑐 𝑏 𝑐 𝑑 . Jadi model pada persamaan (1) dan (2) setelah dilakukan penyekalaan akan menjadi 𝜀𝑥1 = −𝑥1 3 + 𝑇𝑥1 − 𝑥2 (14) 𝑥2 = 𝑥1 − 𝑥𝑎 (15) Persamaan (14) dan (15) merupakan persamaan yang muncul pada persamaan (1) dan (2), dengan menghilangkan notasi tilda maka persamaan (14) dan (15) dapat digunakan dengan dimensi yang dapat dihubungkan jika muncul pada pengukuran denyut jantung. Hal ini akan digunakan pada penelitian yang lebih lanjut. Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. Kesimpulan Berdasarkan analisis model denyut jantung yang dilakukan terlihat bahwa teori bifurkasi telah digunakan untuk menganalisis suatu persamaan diferensial yang mempunyai perubahan sifat kualitatif pada titik setimbang yang dikarenakan perubahan parameter. Persamaan tak linier yang sudah ada juga telah memenuhi sistem kerja jantung pada saat sistole dan diastole. Pada persamaan (1) dan (2) merupakan jenis bifurkasi homoklinik yang timbul karena adanya siklus periodik dengan sifat titik setimbang yang cenderung tidak stabil. Sifat titik setimbang adalah tidak stabil yang berarti bahwa jantung sedang berada pada kondisi sistole dan diastole yang berulang-ulang pada nilai parameter 𝜀 ≤ 0.25 dan 𝜀 ≥ 0.25, −0.5 ≤ 𝑥𝑑 ≤ 0.5 dan 𝑇 ≥ 1. Ucapan Terima Kasih : Terima kasih kepada Bapak Dr. Suryasatriya Trihandaru, M. Sc yang telah berkontribusi pada analisis dimensi model yang akan digunakan untuk penelitian lebih lanjut. Daftar Pustaka [1]. Golubitsky, M and Dellnitz, M. (1999). Liniear Algebra and Differential Equation Using Matlab. Brooks/Cole Publishing Company. [2]. Imrona, Mahmud. (2009). Aljabar Linier Dasar. Jakarta : Erlangga. [3]. Jones, D.S and Sleeman, B. D. (1983). Differential Equations And Mathematical Biology. Departement of Mathematical Sciences, University of Dundee. London. [4]. Maoan Han, Junmin Yang and Dongmei Xiao. (2012). Limit Cycle Bifurcation Near a Double Homoclinic Loop with a Nilpotent Saddle. International Journal of Bifurcation and Chaos. [5]. Pangase, Yulin. (2013). Penyelesaian Untuk Model Reaktor Reaksi Kimia (Continuous Flow Stirred Chemical Tank Reactor (Cstr)) Dengan Menggunakan Teori Bifurkasi. Fakultas Ilmu Alam dan Teknologi Rekayasa Universitas Halmahera. [6]. Thanom, Witt and Loh, Robert N. K. (2011). Nonlinier Control Of Heartbeat Models. Departement of Electrical and Computer Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73. [7]. Engineering Center for Robotics and Advanced Automation Oakland University Rochester. USA. Yang WY, Cao W, Chung TS and Morris J. (2005). Applied Numerical Methods Using Matlab. United State of America : Willey-Interscience. Prosiding Seminar Nasional Pendidikan Matematika LSM XXI pada tanggal 22 Februari 2014 yang diselenggarakan oleh Himpunan Mahasiswa Jurusan Pendidikan Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Yogyakarta., ISBN, 978 – 979 – 17763 – 7 – 0,hal.65-73.