pengaturan motor induksi 1 phase sebagai penggerak mobil listrik
advertisement

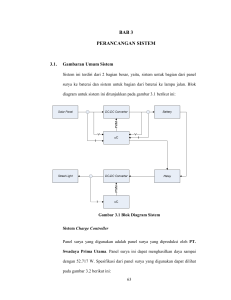
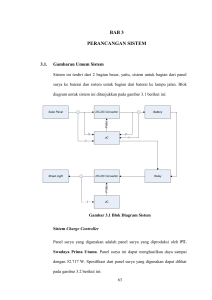
RANCANG BANGUN UNITERRUPTIBLE POWER SUPPLY (UPS) DENGAN ENERGI HYBRID (SUBJUDUL: SOFTWARE) Dicky Indramanto 1, Ir. Joke Pratilartiarso, MT2, Ir. Moh. Zaenal Efendi, MT.2 1 Mahasiswa Jurusan Teknik Elektro Industri, 2 Dosen PENS-ITS Politeknik Elektronika Negeri Surabaya Institut Teknologi Sepuluh Nopember Surabaya Kampus ITS Sukolilo Surabaya 60111 Telp (+62) 031-59447280 .Fax (+62) 031-5946114 e-mail:[email protected] Abstract Electrical energy demand in the internet cafe and supermarket increased and electrical energy from PLN often interruption. This final project utilizing stationary bicycle and the sun as a source of electrical energy to the UPS (Unitterruptible Power Supply)with capacity 250 watt is used as electrical energy reserve for the standard computer is used for server in the internet café and cashier in the supermarket. Which the bike is used to drive the generator to charge batteries with solar cells. The voltage output of the solar cell and DC generator is lowered and raised first with the DC-DC converter after the output of the DC-DC converter is connected to the microcontroller to read as the ADC, then the microcontroller generates a PWM signal to adjust the duty cycle of a series of buck boost converter and boost converter. Signal adjusted by calculate logarithmic of PI controller for voltage charger 14.5 volt. DC Generator was filled accu by current 0.2 ampere and solar cell was filled accu by current 0.8 ampere. Expected outputs of the two series can be constant. This project will be widely used in the internet cafe and supermarket that requires electrical energy reserve in order to assist them in managing the internet cafe activity using motion and heat energy available in the natural sun is free and unlimited, which this UPS can supply electrical energy to the computer during 1 hour maximal. Kata kunci: PI kontroler, PWM, konverter, sensor tegangan, ADC, Mikrokontroler. listrik pada computer sebagai pengganti suplai PLN saat mati. 1. PENDAHULUAN Dewasa ini pengembangan dan penggunaan energi terbarukan (renewable energy) makin menjadi hal yang sangat penting. Apalagi dengan makin mengglobalnya isu emisi CO2 yang kontra terhadap pelestarian lingkungan global. Gegapgempita upaya diversifikasi sumber energi tak pelak merambah Indonesia menyusul ditandatanganinya Inpres No.1/2006 tentang Penyediaan dan Pemanfaatan Bahan Bakar Nabati. Tentu ini merupakan kondisi yang positif, momentum yang tepat bagi seluruh komponen bangsa terkait, untuk segera memikirkan dan mengambil langkah serius guna pengembangan sumber energi alternatif masa depan. Salah satu energy yang akan selalu tersedia secara gratis dalam waktu yang cukup lama adalah energy matahari. Panas matahari merupakan satu diantara sumber energy yang dapat dimanfaatkan untuk membangkitakan energy listrik. Dalam hal ini digunakan solar cell untuk memanfaatkan energy matahari agar adapat digunakan untuk kebutuhan manusia sendiri. Energy yang lain yang sebenarnya dapat digunakan sebagai enegy alternative adalah pemanfaatan energy kinetic (gerak) dari sepeda statis, di-couple dengan sebuah alternator. Sehingga ketika dikayuh akan dapat menghasilkan tenaga. Dan tenaga yang dikeluarkan akan menghasilkan keluaran berupa tegangan yang dapat dimanfaatkan oleh manusia juga. Energi dari alternator yang dipadukan dengan solar cell disimpan bersama – sama dalam battery/accu untuk sumber energy 2. DASAR TEORI Kontrol PI merupakan salah satu jenis pengatur yang banyak digunakan pada kontrol loop tertutup. Selain itu sistem ini mudah digabungkan dengan metoda pengaturan yang lain seperti Fuzzy dan Robust, Sehingga akan menjadi suatu sistem pengatur yang semakin baik. Diagram blok kontrol PI ditunjukan pada Gambar 2.1. Gambar 2.1. Blok Diagram PI Controler Gabungan aksi kontrol proporsional dan aksi kontrol integral membentuk aksi kontrol proporsional plus integral ( controller PI ). Gabungan aksi ini mempunyai keunggulan dibandingkan dengan masing-masing penyusunnya. Keunggulan utamanya adalah diperolehnya keuntungan dari masing-masing aksi kontrol dan kekurangan aksi kontrol yang satu dapat diatasi. Dengan kata lain elemen-elemen controller P dan I secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem dan menghilangkan offset. Dalam waktu kontinyu, sinyal keluaran pengendali PI dapat dirumuskan sebagai persamaan 2.1. 1 (2.1) dengan Co(t) Kp Ti Ki e(t) (e(t) mengandung unsur integrator ataupun polepole kompleks, reaksi sistem akan berbentuk S. Gambar 2.3 menunjukkan kurva berbentuk S tersebut. Kelemahan metode ini terletak pada ketidakmampuannya untuk plant integrator maupun plant yang memiliki pole kompleks. = sinyal keluaran pengendali PI = konstanta proporsional = waktu integral = konstanta integral = sinyal kesalahan = referensi – keluaran plant) Gambar 2.3 Respon tangga satuan sistem 2.1 Penalaan Paramater Kontroler Penalaan parameter PID selalu didasari atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum penalaan parameter kontroler itu dilakukan. Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak diperlukan lagi, karena dengan menggunakan data yang berupa kurva krluaran, penalaan PID telah dapat dilakukan. Penalaan bertujuan untuk mendapatkan kinerja sistem sesuai spesifikasi perancangan. Ogata menyatakan hal itu sebagai alat control (controller tuning) (Ogata, 1997, 168, Jilid 2). Gambar 2.4 Kurva Respons berbentuk S Kurva berbentuk-s mempunyai dua konstanta, waktu mati (dead time) L dan waktu tunda T. Dari Gambar 2.4 terlihat bahwa kurva reaksi berubah naik, setelah selang waktu L. Sedangkan waktu tunda menggambarkan perubahan kurva setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis yang bersinggungan dengan garis kurva. Garis singgung itu akan memotong dengan sumbu absis dan garis maksimum. Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu mati, dan perpotongan dengan garis maksimum merupakan waktu tunda yang diukur dari titik waktu L. Penalaan parameter PID didasarkan perolehan kedua konstanta itu. Zeigler dan Nichols melakukan eksperimen dan menyarankan parameter penyetelan nilai Kp, Ti, dan Td dengan didasarkan pada kedua parameter tersebut. Tabel 2.1 merupakan rumusan penalaan parameter PID berdasarkan cara kurva reaksi. 2.1.1 Metode Ziegler-Nichols Ziegler-Nichols pertama kali memperkenalkan metodenya pada tahun 1942. Metode ini memiliki dua cara, metode osilasi dan kurva reaksi. Kedua metode ditujukan untuk menghasilkan respon sistem dengan lonjakan maksimum sebesar 25%. Gambar 2.2 memperlihatkan kurva dengan lonjakan 25%. Tabel 2.1 Penalaan paramater PID dengan metode kurva reaksi Tipe Kontroler Gambar 2.2 Kurva respons tangga satuan yang memperlihatkan 25 % lonjakan maksimum 2.1.2 Metode Kurva Reaksi Metode ini didasarkan terhadap reaksi sistem untaian terbuka. Plant sebagai untaian terbuka dikenai sinyal fungsi tangga satuan (Gambar 2.3). Kalau plant minimal tidak 2 Kp Ti Td ~ 0 P T/L PI 0,9 T/L L/0.3 0 PID 1,2 T/L 2L 0,5L 3. 2.1.3 Metode Osilasi Metode ini didasarkan pada reaksi sistem untaian tertutup. Plant disusun serial dengan kontroller PID. Semula parameter parameter integrator disetel tak berhingga dan parameter diferensial disetel nol (T i = ~ ;Td = 0). Parameter proporsional kemudian dinaikkan bertahap. Mulai dari nol sampai mencapai harga yang mengakibatkan reaksi sistem berosilasi. Reaksi sistem harus berosilasi dengan magnitud tetap(Sustain oscillation) (Guterus, 1994, 9-9). Gambar 2.5 menunjukkan rangkaian untaian tertutup pada cara osilasi. PERENCANAAN Pada bab ini dibahas perencanaan perangkat lunak dari penstabil tegangan solar cell dan sepeda statis untuk pengecasan aki Uniterruptible Power Supply (UPS). Gambar 3.1 Blok diagram sistem Seperti yang terlihat pada Gambar 3.1, beberapa peralatan yang mendukung perencanaan ini antara lain sel surya, sepeda statis, generator DC, accumulator, DC-DC Converter (buck-boost, boost converter), inverter dan mikrokontroler. Gambar 2.5 Sistem untaian tertutup dengan alat kontrol proporsional Nilai penguatan proportional pada saat sistem mencapai kondisi sustain oscillation disebut ultimate gain Ku. Periode dari sustained oscillation disebut ultimate period Tu (Perdikaris, 1991, 433). Gambar 2.6 menggambarkan kurva reaksi untaian terttutup ketika berosilasi. 3.2 SKEMA DIAGRAM SISTEM Gambar 3.2 berikut adalah flowchart main program sistem pada proyek akhir yang digunakan untuk mengatur duty cycle DC-DC Converter. Bila nilai variable point tidak sama dengan set point maka aliran kembali pada proses PI kontrol yang mengatur duty cycle DC-DC Converter melalui PWM. Gambar 2.6 Kurva respon sustain oscillation Penalaan parameter PID didasarkan terhadap kedua konstanta hasil eksperimen, Ku dan Pu. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp, Ti, dan Td berdasarkan rumus yang diperlihatkan pada Tabel 2.3. Gambar 3.2 Flowchart system 3.3 Tabel 2 .3 Penalaan paramater PID dengan metode osilasi Tipe Kontroler Kp P 0,5.Ku PI PID 0,45.Ku 0,6.Ku Ti 3.3.1 Kontroler Pembuatan kontroler PI dengan metode tuning Ziegler Nichols : Osilasi pada DC-DC Converter. Td 3.3.1.1 Simulasi Pengaturan Tegangan Output Buck-Boost Converter dengan Kontroler PI Menggunakan PSIM Simulasi dilakukan dengan menggunakan bantuan komputer menggunakan software PSIM ver 6.0 . Gambar 3.3 menunjukan skema Buck-boost converter. 1/2 Pu 0,5 Pu Perancanaan dan Pembuatan Perangkat Lunak 0,125 Pu 3 dibandingkan dengan respon dinamis Buck-Boost Converter tanpa PI Mp tr tp ts = 83,13 % = 0,94297 ms = 1,82 ms = 11,8825 ms 3.3.1.2 Gambar 3.3 Buck-Boost Converter dengan menggunakan PSIM Sinyal respon open loop tegangan output Buckboost converter seperti ditunjukan Gambar 3.4. Simulasi Pengaturan Tegangan Output Boost Converter dengan Kontroler PI Menggunakan PSIM Simulasi dilakukan dengan menggunakan bantuan komputer menggunakan software PSIM ver 6.0 . Gambar 3.7 menunjukan skema Boost converter. Gambar 3.7 Buck-Boost Converter dengan menggunakan PSIM Gambar 3.4 Sinyal respon open loop Buck-Boost Converter Dengan metode Ziegler Nicholz osilasi rangkaian di close loop dengan menambahkan kontroler proporsional maka didapatkan Kontanta proporsional (Kp) hingga respon berosilasi teratur sebesar 1,2767031. Sinyal respon open loop tegangan output Buckboost converter seperti ditunjukan Gambar 3.8. Gambar 3.8 Sinyal respon open loop Boost Converter Dengan metode Ziegler Nicholz osilasi rangkaian di close loop dengan menambahkan kontroler proporsional maka didapatkan Kontanta proporsional (Kp) hingga respon berosilasi teratur sebesar 1,2877596. Gambar 3.9. Kurva osilasi close loop Buck-Boost Converter dengan ultimate gain(Ku). Gambar 3.5. Kurva osilasi close loop Buck-Boost Converter dengan ultimate gain(Ku). Pada Gambar 3.5 nilai osilasi puncak ke puncak dapat diketahui sehingga didapatkan ultimate periode (Pu) sebesar 1,576x10-3. Dengan melihat Tabel 2.3 pada bab 2, nilai Kp dan Ti. Kontroler PI Kp = 0,45 x 1,2767031 = 0,574516 Ti = (1/1,2) x 1,576x10-3 = 1,31333 x10-3 sinyal respon tegangan ouput Buck-Boost Converter yang dikontrol dengan PI sehingga didapat respon dinamis sebagai berikut Pada Gambar 3.9, nilai osilasi puncak ke puncak dapat diketahui sehingga didapatkan ultimate periode (Pu) sebesar 2,175x10-3. Dengan melihat Tabel 2.3 pada bab 2, nilai Kp dan Ti. Mp tr tp ts Kontroler PI Kp = 0,45 x 1,2877596 = 0,57949 Ti = (1/1,2) x 2,175x10-3 = 1,8125 x10-3 = 0% = 1,072 ms = 1,072 ms = 14,394 ms 4 Mp tr tp ts = 71% = 0,916 ms = 1,43 ms = 62,5878 ms Tabel 4.2 Tegangan keluaran boost converter dengan tegangan input variable dan pembebanan tetap Vin Duty Vout Vout Error (V) Cycle exp (V) calc (V) (%) (%) 4 66,67 10,55 14.5 27,24 5 66,67 13,31 14.5 8,20 6 62,22 14,53 14.5 0,20 7 57,77 14,52 14.5 0,13 8 48,89 14,48 14.5 0,13 9 44,44 14,44 14.5 0.41 10 35,55 14,43 14.5 0.48 11 28,88 14,45 14.5 0,34 12 22,22 14,44 14.5 0,41 13 17,78 14,44 14.5 0,41 14 17,78 14,84 14.5 2,34 15 17,78 15,97 14.5 10,13 dibandingkan dengan respon dinamis Buck-Boost Converter tanpa PI Mp tr tp ts = 90,34 % = 0,94423 ms = 1,8425 ms = 49,378 ms 3.3.2 Pembangkitan Sinyal PWM Diperlukan dua buah pembangkitan PWM untuk dua buah DC-DC Converter sehingga pemilihan timer1 lebih tepat karena terdapat pada port yang sama yaitu pan pin 4 dan pin 5 (OC1A dan OC1B). Frekuensi yang digunakan 40Khz, sehingga untuk pengaktifan register pada timer 1 yaitu Tegangan input yang masuk memiliki batasan yang dapat dinaikkan tegangannya oleh boost converter. Tegangan minimum yang diperlukan yaitu sekitar 6 volt dan tegangan maksimum sekitar 14 volt. Hal ini dikarenakan pembatasan dutycycle agar MOSFET tidak selalu dalam keadaan konduksi. Grafik dapat dilihat pada Gambar 4.7 fpwm= fosc/(N*(1+top)) dimana : fpwm= frekuensi yang mampu dihasilkan fosc = frekuensi Kristal mikrokontroler N = prescaler Top = maksimum bit fpwm=11059.200Khz(1*(1+255)) fpwm≈40Khz 5. 20 6. 7. 10 8. 9. 0 10. Dengan mengatur bit pada register TCCR1A dan TCCR1B sebagai berikut : TCNT1= 0x00FF (maksimum 8bit fast pwm) TCCR1A=10100001 =0xA1 TCCR1B=00001001=0x09 Vin 4 5 6 7 811. 9 . 10 11 12 13 14 15 Gambar 4.7 Grafik tegangan keluaran boost converter terhadap tegangan input variable. Atau dinyatakan dengan periode adalah : Tabel 4.3 tegangan keluaran boost konverter dengan tegangan input tetap dan pembebanan variable. Vin(V Vout(V Iout(A Vcal Error ) ) ) c % 14.49 0.17 14.5 0.06 9 14.49 0.2 14.5 0.06 9 14.45 0.3 14.5 0.34 9 14.45 0.35 14.5 0.34 9 14.44 0.4 14.5 0.41 9 14.44 0.45 14.5 0.41 9 14.43 0.5 14.5 0.55 9 14.41 0.55 14.5 0.62 9 14.39 0.6 14.5 0.71 9 14.39 0.65 14.5 0.71 9 14.36 0.7 14.5 0.81 9 Tpwm=1/fpwm Tpwm=(1+top)*Tosc*N Dimana: Tpwm = periode frekuensi PWM Tosc = periode frekuensi Kristal mikro N = prescaler Tpwm=(1+255)*0,092us*1 Tpwm≈0,25us 4. Vout PENGUJIAN DAN ANALISA Kontroler PI merupakan program yang digunakan untuk pengaturan pada dutycycle PWM dengan sistem close loop agar tegangan keluaran DC-DC Converter stabil. Tabel 4.2 menunjukan data tegangan keluaran yang distabilkan dengan kontroler PI pada Boost Converter. Tabel 4.3 menunjukan tegangan konstan kisaran 14.5 volt meski beban di ubah dalam range tertentu. 5 Tabel 4.4 Tegangan keluaran buck-boost converter dengan tegangan input variable dan pembebanan tetap 10 5 Vin (V) Vout calc (V) 4 5 6 9.67 10.35 12.44 14.5 14.5 14.5 33.31 28.62 14.20 7 8 9 10 11 12 14.43 14.54 14.56 14.51 14.53 14.54 14.5 14.5 14.5 14.5 14.5 14.5 0.48 0.27 0.41 0.06 0.20 0.27 13 14 15 14.53 14.48 14.49 14.5 14.5 14.5 0.20 0.13 0.06 14,49 14,49 14,45 14,45 14,44 14,44 14,43 14,41 14,39 14,39 14,36 0 Vout exp (V) Gambar 4.8 Grafik tegangan keluaran boost converter dengan pembebanan variable Gambar 4.8, menunjukan dengan pembebanan yang variable tegangan konstan kisaran 14.5 volt. Respon tegangan keluaran boost converter saat open loop (tanpa kontroler) ditunjukan pada Gambar 4.9. 20 Error (%) 15 Tegangan input yang masuk memiliki batasan yang dapat dinaikkan tegangannya oleh buck-boost converter. Tegangan minimum yang diperlukan yaitu sekitar 7 volt dan tegangan maksimum sekitar 14 volt. Hal ini dikarenakan pembatasan dutycycle agar MOSFET tidak selalu dalam keadaan konduksi. Grafik dapat dilihat pada Gambar 4.11 10 5 s 0 0,33 0,99 1,65 2,31 2,97 3,63 Gambar 4.9 Grafik respon open loop tegangan keluaran boost converter. 20 15 10 5 0 Sedangkan respon tegangan keluaran boost converter dengan kontroler PI (close loop) ditunjukan pada Gambar 4.10. 20 Vout Vin 4 5 6 7 8 9 10 11 12 13 14 15 15 Gambar 4.11 Grafik tegangan keluaran buck-boost converter terhadap tegangan input variable. 12. 10 5 Tabel 4.5 tegangan keluaran buck-boost konverter dengan tegangan input tetap dan pembebanan variable. Vin(V) Vout(V) Iout(A) Vcalc Error% 0 0,5 1,5 2,5 3,5 4,5 5,5 6,5 Gambar 4.10 Grafik respon close loop tegangan keluaran boost converter. Tabel 4.4 menunjukan data tegangan keluaran yang distabilkan dengan kontroler PI pada Buck-Boost Converter dengan pembebanan tetap namun tegangan masukan di ubah. 6 10 10 10 14.54 14.54 14.53 0.13 0.2 0.3 14.5 14.5 14.5 0.27 0.27 0.20 10 14.54 0.37 14.5 0.27 10 14.53 0.42 14.5 0.20 10 14.55 0.51 14.5 0.34 10 14.53 0.55 14.5 0.20 10 14.53 0.7 14.5 0.20 10 14.51 0.74 14.5 0.06 10 14.49 0.82 14.5 0.06 10 14.49 0.97 14.5 0.06 Tabel 4.5 menunjukan tegangan konstan kisaran 14.5 volt meski beban di ubah dalam range tertentu. tegangan keluaran yang direncanakan yaitu 14.5 volt dengan mengubah tegangan input atau jumlah beban dalam range tertentu. 2. Adanya batasan pengaturan lebar dutycycle pada DC-DC Converter agar terjadi proses switching. Batas minimum 20% dan batas maksimum 80% dari dutycycle. 3. Desain induktor mempengaruhi baik tidaknya respon DC-DC Converter terhadap masukan tangga. 14,54 14,54 14,53 14,54 14,53 14,55 14,53 14,53 14,51 14,49 14,49 15 10 5 0 Gambar 4.12 Grafik tegangan keluaran buck-boost converter dengan pembebanan variable 5.2 SARAN-SARAN Dalam pengerjakan dan penyelesaian Proyek Akhir ini tentu tidak lepas dari berbagai macam kekurangan dan kesalahan, baik itu pada perancangan sistim maupun pada proses pembuatan Proyek Akhir yang telah dibuat. Untuk memperbaiki kekurangan-kekurangan tersebut, maka perlu melakukan hal-hal sebagai berikut: 1. Desain DC-DC konverter yang baik, sebaiknya lebih diperhatikan dalam pemilihan jenis komponen dan ratingnya agar menghasilkan efisiensi rangakain yang baik. 2. Desain dan pembuatan induktor yang lebih baik serta penenempatannya pada PCB karena desain yang kurang baik dapat menyebabkan losses pada rangkaian. 3. Penggunaan generator DC dan sel surya hendaknya disesuaikan dengan beban yang akan disuplai agar tidak terjadi drop tegangan. 4. Pengetesan komponen satu persatu perlu dilakukan supaya mencegah adanya komponen yang rusak dan dapat merusak komponen lain serta mengurangi error sejak dini. 5. Memperbanyak referensi sehingga pembuatan dan pengembangan tugas akhir lebih menyasar pada masyarakat. Gambar 4.12, menunjukan dengan pembebanan yang variable tegangan konstan kisaran 14.5 volt. Respon tegangan keluaran boost converter saat open loop (tanpa kontroler) ditunjukan pada Gambar 4.13. 20 15 10 5 0 0,33 0,66 0,99 1,32 1,65 1,98 2,31 2,64 2,97 3,3 3,63 3,96 s Gambar 4.13 Grafik respon open loop tegangan keluaran buck-boost converter. Sedangkan respon tegangan keluaran boost converter dengan kontroler PI (close loop) ditunjukan pada Gambar 4.14. 20 15 10 5 DAFTAR PUSTAKA 0 1.Daniel W. Hart, Introducing to Power Electonics (International Edition), 2.Blogs, ttl pembangkit listrik tenaga angin, community Portal of Gunadarma University. 3. Bakhtiar Indra K, 2010, Penerapan Metode Auto Tuning PI Relay Feedback Ziegler-Nichols pada Pengendalian Level Ketinggian Cairan Menggunakan Mikrokontroler ATmega 8535, Jurusan Teknik Elektro Universitas Diponegoro. 4.Ir. Abdul Wahid, MT, Penyetelan PID (ppt), Jurusan Teknik Kimia Universitas Indonesia. 5.Eka Candra Wijaya, 2003, Auto Tuning PID Berbasis Metode Osilasi Ziegler-Nichols Menggunakan Mikrokontroler AT89S52 pada Pengendalian Suhu, 6.Yaya Suryana, Anwar Mujadin, Rona Regen, Performance Evaluation of GeneticTuned PI-Based Fuzzy Logic Controller, Program Studi Teknik Elektro Universitas Al Azhar Indonesia. 0,5 1,5 2,5 3,5 4,5 5,5 6,5 Gambar 4.14 Grafik respon close loop tegangan keluaran buck-boost converter. 5. 5.1 PENUTUP KESIMPULAN Setelah melalui beberapa proses perencanaan, pembuatan dan pengujian alat serta dari beberapa data yang didapat dari pengujian dan pembuatan Tugas Akhir ini, maka dapat diberikan kesimpulan sebagai berikut: 1.Tegangan keluaran dapat dijaga konstan antara 14.4 volt hingga 14.6 volt dari 7 8