Vektor dan Aplikasi Rangkaian Listrik Hukum Kirchoff FISIKA
advertisement

Vektor dan Aplikasi Rangkaian Listrik Hukum Kirchoff
FISIKA MATEMATIKA 1
Anggota Kelompok :
1.
2.
3.
4.
5.
Annida Melia Zulika
Arshinta Eka Putri
Devis Maredona
Indah Budiningtyah
Intan Septiani Rosa
1101135002
1101135003
1101135030
1101135010
1101135011
PENDIDIKAN FISIKA
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS MUHAMMADIYAH PROF. DR. HAMKA
2013
VEKTOR
Vektor didefinisikan sebagai besaran yang memiliki arah. Kecepatan,
gaya dan pergeseran merupakan contoh – contoh dari vektor karena
semuanya memiliki besar dan arah walaupun untuk kecepatan arahnya
hanya positif dan negatif. Vektor dikatakan berada di ruang – n ( Rn) jika
vektor tersebut mengandung n komponen. Jika vektor bearada di R2maka
dikatakan vektor berada di bidang, sedangkan jika vektor berada di
R3maka dikatakan vektor berada di ruang. Secara geometris, di bidang dan
di ruang vektor merupakan segmen garis berarah yang memiliki titik awal
dan titik akhir. Vektor biasa dinotasikan dengan huruf kecil tebal atau
huruf kecil dengan ruas garis.
Contoh 1:
Dari gambar diatas terlihat beberapa segmen garis berarah ( vektor )
seperti ̅̅̅̅
𝐴𝐵 , ̅̅̅̅
𝐴𝐶 dan ̅̅̅̅
𝐴𝐷 dengan A disebut sebagai titik awal , sedangkan
titik B, C dan D disebut titik akhir.
Vektor posisi didefinisikan sebagai vektor yang memiliki titik awal O
( untukvektor di bidang , titik O adalah ( 0,0 )).
Vektor dinyatakan dengan :
1.
1
Matriks satu kolam-Vektor kolam 𝑋̅ = [2].
4
2.
Matriks satu baris- Vektor baris 𝑋̅ = [1 2
4].
Untuk selanjutnya bila disebut vektor yang dimaksud Vektor Kolom.
1
Contoh : 𝑋̅ = [2] mempunyai 3 komponen.
4
𝑦̅ = [2 4] mempuyai 2 komponen.
𝑎11
𝑎11
Secara Umum = [ ⋮ ]
𝑎𝑛1
A. Geometri dan Notasi Vektor
Penampilan vektor secara geometri dapat digambarkan pada sebuah
panah yang ditarik pada sebuah titik (A) ke titik yang lain (B). Panjang
antra A dan B ini disebut besar vektor dan arah garis yang ditarik dari A ka
B dikatakan arah vektor tersebut. Titk awal vektor (A) disebut titik
tangkap atau titik awal atau titik asal dan titik B disebut titik terminal atau
titik terminus.
A
B
A
B
Pernyataan vektor ini biasanya dinotasikan pada sebuah huruf yang
ditebalkan atau diatasnya diberi tanda panah ⃗⃗⃗
𝐹 dibaca vektor F yang
⃗⃗⃗ | atau F. Vektor dapat juga ditampilakan sebagai dua huruf,
mempunyai|𝐹
⃗⃗⃗⃗⃗⃗ ) artinya vektor ini mempunyai panjang arah AB dan arahnya dari A
(𝐴𝐵
ke B.
⃗⃗⃗⃗⃗ ) maka
Jika kita mempunyai vektor yang ditarik dari B ke A, (𝐵𝐴
vektor ini mempunyai besar adalah panjang BA (sama dengan panjang
AB) dan arahnya dari B ke A. Mari kita bandingkan vektor AB dan BA
ini. Kedua vektor mempunyai besar sama tetapi arahnya berlawanan,
⃗⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗ .
𝐴𝐵 = −𝐵𝐴
⃗⃗⃗ = 𝐵
⃗⃗⃗ jika besar vektor A dan B
Sekarang kita dapat ,mengatakan 𝐴
sama dan arahnya sama. Dari pernyataan ini, kita dapat mengatakan bahwa
sebuah vektor A tidak berubah jika vektor A dipindahkan, asalkan arahnya
tetap searah dengan arah mula-mula.
⃗⃗⃗ = −𝐵
⃗⃗⃗ berarti besar vektor A sama denganbesar vektor B tapi
𝐴
⃗⃗⃗ = 𝑘 𝐵
⃗⃗⃗ , dengan konstata, berarti vektor A besarnya
arahnya berlawanan. 𝐴
k kali besar vektor B dan arahnya akan sama jika k> 0 dan arahnya akan
berlawanan jika k< 0. Jadi dapat kita katakan, jika sebuah skalar k
dikalikan dengan sebuah vektor, hasil yang didapat adalah sebuah vektor
yang besarnya k kali vektor mula-mula.
⃗⃗⃗
−𝐵
⃗⃗⃗
⃗⃗⃗
𝐴 = −𝐵
B. Vektor Satuan dan Vektor Nol
Jika sebuah vektor A dibagi dengan besarnya
𝐴
|𝐴|
=
𝐴
𝐴
diperoleh
sebuah vektor yang besarnya satu dan arahnya searah vektor A, vektor ini
disebut vektor satuan atau unit vektor. Vektor satuan dari vektor A biasa
dinotasikan sebagai 𝑎̂ ,
𝑎̂ =
𝐴
|𝐴|
=
𝐴
𝐴
Untuk vektor yang vesarnya nol disebut vektor nol, yaitu vektor yamg
besarnya nol dan arahnya dapat kita buat sendiri sesuai dengan keperluan
diberi notasi 𝑜.
1.1
OPERASI-OPERASI PADA VEKTOR
A. Penjumlahan Vektor
Misalkan ( 𝑢̅ dan 𝑣̅ ) adalah vektor – vektor yang berada di ruang yang
sama, maka vektor ( 𝑢̅ + 𝑣̅ ) didefinisikan sebagai vektor yang titik
awalnya =titik awal u dan titik akhirnya = titik akhir v .
Contoh 2
Perhatikan
gambar.
Misalkan
𝑢̅ =
̅̅̅̅
𝐴𝐵
dan
𝑣̅ =
̅̅̅̅
𝐵𝐶
,
jikavektordidefinisikan sebagai 𝑤
̅ = 𝑢̅ + 𝑣̅ , maka w akan memiliki titik
awal= A dan titik terakhir = C, jadi w merupakan segmen garis berarah
̅̅̅̅ .
𝐴𝐶
Penjumlahan vektor =
𝑎̅ = [𝑎𝑎1] dan 𝑏̅ = [𝑏𝑏1]
2
2
𝑎
Maka 𝑎̅ + 𝑏̅ = [ 1+𝑏1 ]
𝑎2+ 𝑏2
⃗⃗⃗ + 𝐵
⃗⃗⃗
⃗⃗⃗ = 𝐵
⃗⃗⃗ + 𝐴
Hukum Komulatif : 𝐴
Hukum Assosiatif : ⃗⃗⃗
𝐴 + ( ⃗⃗⃗
𝐵 + ⃗⃗⃗
𝐶 ) =( ⃗⃗⃗
𝐴 + ⃗⃗⃗
𝐵 ) + ⃗⃗⃗
𝐶
B. Perkalian Vektor dengan Skalar
Vektor nol didefinisikan sebagai vektor yang memiliki panjang
=0.Misalkan 𝑢̅vektor tak nol dan k adalah skalar , k ∈R . Perkalian vektor
𝑢̅ dengan skalar
k , k𝑢̅
didefinisikan sebagai vektor yang
panjangnya‖𝑢̅‖kali panjang 𝑢̅dengan arah :
Jika k > 0 →searah dengan 𝑢̅
Jika k < 0 →berlawanan arah dengan 𝑢̅
Contoh 3
𝑢1
𝑢1
𝑘𝑢
𝑢̅ = [𝑢 ] maka k𝑢̅ = 𝑘 [𝑢 ] = [ 1 ]
𝑘𝑢2
2
2
𝑢̅ = [𝑢1 , 𝑢2 ] maka k𝑢̅ = 𝑘 [𝑢1 , 𝑢2 2] = [𝑘𝑢1 , 𝑘𝑢2 ]
C. Perhitungan Vektor
Diketahui a dan b vektor–vektor di ruang yang komponen–
komponennyaadalah 𝑎̅ = (𝑎1 ,𝑎2 , 𝑎3 ) dan 𝑏̅ = (𝑏1 ,𝑏2 , 𝑏3 ).
Maka :
𝑎̅ + 𝑏̅= (𝑎1 +𝑏1 , 𝑎1 +𝑏2 ,𝑎3 +𝑏3 )
𝑎̅ 𝑏̅ = (𝑎1 -𝑏1 , 𝑎1 -𝑏2 ,𝑎3 -𝑏3 )
k . 𝑎̅ = ( k𝑎1 , k𝑎2 , k𝑎3 )
Jika ̅𝑐 = AB kemudian titik koordinat A = (𝑎1 ,𝑎2 , 𝑎3 ) dan B = (𝑏1 ,𝑏2 , 𝑏3 )
maka ̅𝑐 = (𝑏1 𝑎1 , 𝑏2 𝑎2 , 𝑏3 𝑏3 )
1.2
SISTEM KOORDINAT KARTESIAN
Pada sistem koordinat kartesian, kita hendakanya selalu memakai
sisitem sumbunya sesuai denagan aturan tanagn kanan yaitu dari sumbi x
berputar arah lawan jarum jam ke sumbu y positif dan ibu jari menujukan
arah sumbu z negatif.
Vektor satuan dengan titik lengkapanya di (0,0.0) yang searah dengan
sumbu x positif, sumbu y positif dan sumbu z positif, masing-masing
diberi notasi dengan𝑖̂, 𝑗̂, 𝑘̂ .
y
y
𝑘̂
𝑗̂
𝑖̂
𝑗̂
x
𝑖̂
x
Selanjutnya kita perkenalkan pula vektor posisi yaitu vektor yang
mempunyai titik tangkap di titik asal (0,0) ke titik (x,y) pada bidang (dua
dimensi) atau dari (0,0,0) ke titik di (x,y,z) dalam ruang (tiga dimensi).
Atau vektor posisi adalah vektor yang menujukan atau memberikan
informasi tentang posisi sebuah benda atau obyek. Vektor posisi ini bisa
diberi notasi 𝑟atau 𝑅⃗ dan dapat dinyatakan dalam komponen-komponen
yang sejajar dengan sumbu x, sumbu y dan sumbu z.
𝑟 = 𝑥𝑖̂ + 𝑦𝑗̂𝑎𝑡𝑎𝑢 𝑟 = (𝑥, 𝑦) pada bidang besar r = √𝑥² + 𝑦²
𝑟 = 𝑥𝑖̂ + 𝑦𝑗̂ + 𝑧𝑘̂ 𝑎𝑡𝑎𝑢 𝑟 = (𝑥, 𝑦, 𝑧) pada bidang besar r=√𝑥² + 𝑦² + 𝑧²
y
y
𝑟̂
𝑘̂
𝑗̂
𝑖̂ x
𝑖̂
𝑗̂
x
Jika 𝛼, 𝛽, 𝛾masing-masing antara vektor posisi (𝑟) dengan sumbu x,y
dan z. Maka
𝑥
𝑦
𝑧
cos 𝛼 = , cos 𝛽 = , cos 𝛾 =
𝑟
𝑟
𝑟
Secara umum kita dapat mengatakan bahwa sebuah vektor dapat
diuraikan menjadi komponen-komponen vektor yang searah dengan sumbu
x, sumbu y dan sumbu z. Misalkan sebuah vektor :
𝐴 = 𝐴x 𝑖̂+Ay𝑗̂+Az𝑘̂
atau
𝐴 = 𝐴x+Ay+Az
Dengan 𝐴 = 𝐴x+Ay+Az adalah komponen vektor A pada sumbu x,y
dan z. Oleh sebab itu, penjumlahan vektor dapat kita lakukan dengan
menjumlahkan setiap komponennya.
𝐴 = 𝐴x 𝑖̂+Ay𝑗̂+Az𝑘̂
⃗ = 𝐵x 𝑖̂+By𝑗̂+Bz𝑘̂
dan 𝐵
⃗ = (𝐴x +𝐵x)𝑖̂+(Ay+By)𝑗̂+(Az+Bz)𝑘̂
𝐴+𝐵
1.3
HASIL KALI TITIK , PANJANG VEKTOR DAN JARAK ANTARA
DUA VEKTOR
A. Hasil Kali Titik Dua Vektor Jika Diketahui Komponennya
Diketahui 𝑎̅ = (𝑎1 ,𝑎2 , 𝑎3 ) dan 𝑏̅ = (𝑏1 ,𝑏2 , 𝑏3 ) , Hasil kali titik antara
vektor 𝑎̅ dan 𝑏̅ didefinisikan sebagai :
𝑎̅. 𝑏̅=(𝑎1 .𝑏1 )+ (𝑎2 .𝑏1 ) +(𝑎3 .𝑏3 )
B. Hasil Kali Titik Dua Vektor Jika Diketahui Panjang Vektor dan
Sudut Antara Dua Vektor
Diketahui 𝑎̅ 𝑑𝑎𝑛 𝑏̅ dua buah vektor yang memiliki panjang berturut –
turut ‖𝑎̅‖ dan ‖𝑏̅‖ sedangkan sudut yang dibentuk oleh kedua vektor
adalah 𝜃, sudut 𝜃, ini terbentuk dengan cara menggambarkan kedua vektor
pada titik awal yang sama. Hasil kali titik antara vektor𝑎̅ dan 𝑏̅
didefinisikan sebagai :
𝑎̅ . 𝑏̅= ‖𝑎̅‖‖𝑏̅‖cos 𝜃,𝑉∈[ 0,𝜋] atau 𝑎̅ . 𝑏̅= ab cos 𝜃
(dibaca dot B) dan 𝜃adalah dudut diantara dua vektor.
Jadi hasil kali titik dua buah vektor berupa skalar. Dengan mengetahui
besarnya 𝜃, akan diketahui apakah hasil kali titik akanbernilai positif atau
negatif
a . b 0↔𝜃lancip , 0 𝜃90o
a . b = 0 ↔𝜃= 90o, 𝑎̅ 𝑑𝑎𝑛 𝑏̅saling tegak lurus
a . b 0 ↔𝜃tumpul, 90o 𝜃180o
Dari perkalian dot ini, dapat mancari sudut 𝜃sebagai berikut :
Cos 𝜃:
⃗⃗⃗
⃗
𝐴.𝐵
⃗|
|𝐴||𝐵
=
⃗⃗⃗
⃗
𝐴.𝐵
𝐴𝐵
Sekarang lihat perkalian dot ini
⃗
𝐵
𝜃
𝐴
⃗⃗⃗ 𝐵
⃗ = ⃗⃗⃗
𝐴.
𝐵. 𝐴 karena dua perkalian dot ini merupakan perkalian skalar
yang sama yaitu perkalian besar vektor A, besar vektor B dan cosinus
sudut diantar kedua vektor.
Perkalian dot antara vektor-vektor satuan dapat ditentukan sebagai
berikut :
𝑖.̂ 𝑖̂ = 𝑗̂. 𝑗̂ = 𝑘̂ . 𝑘̂ = |1||1| cos 0° = 1
𝑖.̂ 𝑗̂ = 𝑗̂. 𝑘̂ = 𝑘̂ . 𝑖̂ = |1||1| cos 90° = 0
⃗ = 𝐵x 𝑖̂+By𝑗̂+Bz𝑘̂
𝐴 = 𝐴x 𝑖̂+Ay𝑗̂+Az𝑘̂ dan 𝐵
Maka hasil perkalian dot kedua vektor ini adalah
⃗ = (𝐴x 𝑖̂+Ay𝑗̂+Az𝑘̂) . (𝐵x 𝑖̂+By𝑗̂+Bz𝑘̂)= 𝐴x 𝐵x+AyBy+AzBz
𝐴. 𝐵
⃗ = Ax Bx+AyBy+AzBz
𝐴. 𝐵
Jadi, hasil perkalian dot dari dua vektor yang sama misalnya vektor A
adalah :
𝐴. 𝐴 = 𝐴x 𝐴x+AyAy+AzAz = 𝐴x2+Ay2+Az2= A2
Dari definisi dot diperoleh:
⃗ maka 𝐴. 𝐵
⃗ = 0 atau Ax Bx+AyBy+AzBz = 0
1. 𝐴 𝐵
Ax Ay Az
⃗ maka = = komponen 𝐵
⃗ =0
2. 𝐴//𝐵
Bx By Bz
Pada perkalian dot ini berlaku hukum :
⃗⃗⃗ 𝐵
⃗ = ⃗⃗⃗
Komutatif = 𝐴.
𝐵. 𝐴
⃗⃗⃗ (𝐵
⃗⃗⃗ 𝐵
⃗⃗⃗ 𝐶
⃗ + 𝐶 ) = 𝐴.
⃗ + 𝐴.
Distributif = 𝐴.
C. Perkalian Dua Vektor Menghasilkan Vektor
Jika vektor A dikalikan dengan vektor B dengan tanda perkalian
silang (cross) disebut perkalian silang atau crooss product yang hasilnya
adalah sebuah vektor.
⃗ = sin 𝜃 𝜇̂
𝐴𝑥𝐵
(baca A cross B), 𝜃 adalah sudut diantara kedua vektor 𝜇̂ adalah vektor
⃗ terletak.
satuan yang tegak lurus terhadap bidang dimana vektor 𝐴𝑑𝑎𝑛 𝐵
⃗ | sin 𝜃 dan arahnya
Vektor hasil perkalian ini mempunyai besar |𝐴||𝐵
tegak lurus terhadap bidang dimana kedua vektor A,B. Arahnya menuju
keatas atau kebawah bidang, mengikuti aturan sekerup atau kaidah tanagn
kanan.
𝐴̂𝑥𝐵̂
𝐴̂
𝐵̂
𝐵̂ 𝑥𝐴̂
Jika vektor A dan vektor B msding-masing
⃗ = 𝐵x 𝑖̂+By𝑗̂+Bz𝑘̂
𝐴 = 𝐴x 𝑖̂+Ay𝑗̂+Az𝑘̂ dan 𝐵
Maka perkalian crossnya dapat ditampilkan dalam bentuk determinan,
̂
𝑖̂
𝑗̂
𝑘
̂
̂
𝐴𝑥𝐵= |𝐴𝑥 𝐴𝑦 𝐴𝑧 |
𝐵𝑥
𝐵𝑦
𝐵𝑧
Hasil perkalian cross ini dapat dikalikan dengan debuah skalar
menghasilkan vektor yang serarah dengan vektor hasil perkalian cross dan
letak skalar ini bolehdimana saja asal tidak diberi tanda perkalain dot atau
cross.
𝑘𝐴̂𝑥𝐵̂ = 𝐴̂𝑥 𝑘 𝐵̂ = 𝑘(𝐴̂𝑥𝐵̂ )
Dari definisi cross ini kita dapat menyatakan bahwa :
⃗⃗⃗ 𝐴 Anti Komutatif
1. 𝐴̂𝑥𝐵̂ = 𝐵.
2. 𝐴̂𝑥𝐵̂ = 0 Jika 𝐴̂//𝐵̂
⃗ | maksimum 𝐴𝐵
⃗
3. |𝐴||𝐵
D. Panjang (Norm) =Vektor dan Jarak Antara Dua Vektor
Dengan menggunakan operasi hasil kali titik jika diketahui komponen
𝑎̅ = (𝑎1 ,𝑎2 , 𝑎3 ) didapatkan bahwa 𝑎̅. 𝑎̅ = 𝑎1 2+𝑎2 2+𝑎3 2 ... (1)
Dari definisi hasil kali titik lainnya , didapatkan bahwa
𝑎̅. 𝑎̅= ‖𝑎̅‖‖𝑎̅‖cos 0 ….(2)
Dalam hal ini sudut antara a dan a pastilah bernilai 0 karena keduanya
saling berhimpit. Dari persamaan 1 dan 2 , didapatkan persamaan berikut :
‖𝑎̅‖2 = 𝑎̅. 𝑎̅ → ‖𝑎̅‖ = (𝑎̅. 𝑎̅ )1/2 = √𝑎1 ² + 𝑎2 ² + 𝑎3 ²
E. Jarak Antara Dua Vektor
Jarak antara vektor a dan b didefinisikan sebagai panjang dari vektor
(𝑎̅ − 𝑏̅) dan biasa dinotasikan dengan d (𝑎̅ , 𝑏̅).
d ( 𝑎̅ , 𝑏̅).= (𝑎̅ − 𝑏̅. 𝑎̅ − 𝑏̅)1/2=√(𝑎1− 𝑏1 )2 + (𝑎2 − 𝑏2 )² + (𝑎3− − 𝑏3 ²
Secara geometris , dapat digambarkan seperti berikut ini
Misalkan 𝑎̅ = AC dan 𝑏̅ = ̅̅̅̅
𝐴𝐵 , maka jarak antara 𝑎
̅ dan 𝑏̅merupakan
̅̅̅̅
panjangdari ruas garis berarah 𝐵𝐶
1.4
GARIS DAN BIDANG
A. Persamaan Garis
Untuk menentukan persamaan garis yang melalui titik P (xo.yo.zo)
dantitik Q(x,y,z) dapat dilakukan dengan cara menarik garis lurus dari titik
P ke Q. Vektor PQ dapat dituliskan dalam komponennya,
PQ=(x- xo)𝑖̂+(y- yo)𝑗̂+(z- zo)𝑘̂
Perhatikan gambar dibawah ini :
𝐴
𝑟0
P (xo.yo.zo)
Q (x.y.z)
𝑟
𝐴 = 𝑎𝑖̂ + 𝑏𝑗̂ + 𝑐𝑧̂
Vektor posisi 𝑟 adalah vektor dari (0,0,0) ke titik Q(x,y,z) dan vektor
posisi 𝑟o adalah vektor dari (0,0,0) ke titik P (xo.yo.zo). Dengan
menggunakam pengurangan vektor diperoleh :
⃗⃗⃗⃗⃗ = 𝑟 − 𝑟o
𝑃𝑄
⃗⃗⃗⃗⃗ = (x- xo)𝑖̂+(y- yo)𝑗̂+(z- zo)𝑘̂
𝑃𝑄
Jika garis
PQ ini sejajar dengan sebuah vektor yang diketahui
misalnya vektor 𝐴 = 𝑎𝑖̂ + 𝑏𝑗̂ + 𝑐𝑘̂ maka kita dapat mengatakan bahwa
garis ini merupakan kelipatan dari vektor 𝐴. Jadi dapat dituliskan :
⃗⃗⃗⃗⃗
𝑃𝑄 = 𝑡𝐴, 𝑟 − 𝑟o= 𝑡𝐴
(x- xo)𝑖̂+( x- xo)𝑗̂+(z- zo)𝑘̂ = ta𝑖̂+tb𝑗̂+tc𝑘̂
Dengan t parameter
Jika dua buah vektor sama besar berarti komponen dari vektor satuan
yang sejenis pada kedua ruas persamaan akan sama besarnya, sehingga
diperoleh persamaan
𝑟 − 𝑟o = 𝑡𝐴 → 𝑟o + 𝐴 t
Atau
x- xo = ta, y- yo=tb, z-zo =tc
Persamaan ini disebut persamaan garis parametrik.
Persamaan parametris ini dapat pula dituliskan dalam bentuk lain,
yaitu:
𝑥 − 𝑥𝑜 𝑦 − 𝑦𝑜 𝑧 − 𝑧𝑜
=
=
𝑎
𝑎
𝑎
Persamaan garis yang baru ini disebut persamaan garis simetrik.
Dari uraian di atas dapat disimpulkan bahwa kita dapat membuat
sebuah persamaan garis jika kita mengetahui sebuah titik (xo.yo.zo) yang
dilewati garis tersebut dan sebuah vektor 𝐴 = 𝑎𝑖̂ + 𝑏𝑗̂ + 𝑐𝑘̂ yang arahnya
sejajar dengan garis tersebut.
B. Persamaan Bidang
Untuk menentukan persamaan bidang dimana titik P (xo.yo.zo) terletak
⃗ = 𝑎𝑖̂+b𝑗̂+c𝑘̂, dapat
pada bidang dan mempunyai vektor normal 𝑁
dilakukan dengan cara menarik garis lurus dari titik P ke Q(x,y,z) yang ju
terletak pada bidang.
Vektor PQ dapat dituliskan dalam komponennya
⃗⃗⃗⃗⃗
𝑃𝑄 = 𝑟 − 𝑟o
⃗⃗⃗⃗⃗ = (x- xo)𝑖̂+(y- yo)𝑗̂+(z- zo)𝑘̂
𝑃𝑄
Perhatikan gambar dibawah ini :
⃗ dan
Vektor yang tegak lurus terhadap sebuah bidang diberi notasi 𝑁
disebut vektor normal dari bidang 𝑛⃗ disebut vektor normal satuan. Karena
⃗ ini tegak lurus pada bidang maka vektor 𝑁
⃗ ini tegak lurus pula
vektor 𝑁
⃗ ⃗⃗⃗⃗⃗
terhadap semua garis yang terletak pada bidang. Jadi 𝑁
𝑃𝑄 atau
⃗⃗⃗⃗⃗ = 0
⃗ . 𝑃𝑄
𝑁
⃗ = 𝑎𝑖̂+b𝑗̂+c𝑘̂maka
Jika 𝑁
(𝑎𝑖̂+b𝑗̂+c𝑘̂).[(𝑥 − 𝑥𝑜)𝑖̂ + (𝑦 − 𝑦𝑜)𝑗̂ + (𝑧 − 𝑧𝑜)𝑘̂] = 0
a(x-xo)+b(y- yo)+c(z+ zo) = 0
persamaan ini disebut persamaan bidang yang memounyai vektor
⃗ = 𝑎𝑖̂+b𝑗̂+c𝑘̂ dan salah satu titik yang terletak pada bidang
normal 𝑁
tersebut adalah (xo.yo.zo). Jadi persamaan suatu bidang dapat ditentukan
jika diketahui vektor normalnya serta salah satu titik bidang tersebut.
1.5
PERKALIAN TIGA VEKTOR
A. Perkalian Tiga Vektor yang Menghasilkan Skalar
⃗ 𝑥 ⃗⃗⃗
Perkalian tiga vektor ⃗⃗⃗
𝐴 . (𝐵
𝐶 ) yang menghasilkan sklar dapat
ditulis sebagai,
⃗⃗⃗ . (𝐵
⃗⃗⃗ ) = 𝐵
⃗⃗⃗ 𝑥𝐴) = 𝐶 . (𝐴
⃗⃗⃗ 𝑥 𝐵
⃗ 𝑥𝐶
⃗⃗⃗ . (𝐶
⃗)
𝐴
𝐴𝑥
⃗⃗⃗
⃗⃗⃗
⃗
𝐴 . (𝐵 𝑥 𝐶 ) = |𝐵𝑥
𝐶𝑥
𝐴𝑦
𝐵𝑦
𝐶𝑦
𝐴𝑥
𝐵𝑥 |
𝐶𝑥
B. Perkalian Tiga Vektor yang Menghasilkan Vektor
Perkalian tiga vektor ⃗⃗⃗
𝐴 , ⃗⃗⃗
𝐵 , ⃗⃗⃗
𝐶 yang menghasilkan vektor dapat
dinyatakan sebagai :
⃗⃗⃗
⃗⃗⃗ 𝑥𝐴)𝐵
⃗⃗⃗ 𝑥 𝐵
⃗ 𝑥 ⃗⃗⃗
⃗⃗⃗ − (𝐴
⃗ )𝐶
𝐴 𝑥(𝐵
𝐶 ) = (𝐶
⃗⃗⃗ 𝑥(𝐵
⃗⃗⃗ ) diperoleh hasil cross vektor 𝐴
⃗⃗⃗ dengan vektor yang
⃗ 𝑥𝐶
Pada 𝐴
⃗⃗⃗ ). Untuk perkalian 𝐴
⃗⃗⃗ 𝑥(𝐵
⃗⃗⃗ ) diperoleh vektor hasil
⃗ 𝑥𝐶
⃗ 𝑥𝐶
dihasilkan (𝐵
⃗⃗⃗ 𝑥 𝐵
⃗ ) dengan vektor 𝐶 .Jadi tanda kurung pada perkalian tiga
perkalian (𝐴
vektor perlu dituliskan karena arah vektor yang dihasilkan dari perkalian
tiga vektor ditentukan oleh vektor yang sama terlebih dahulu di crosskan.
1.6
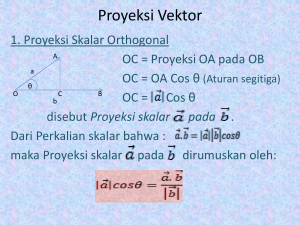
PROYEKSI ORTOGHONAL
Diketahui vektor a dan b adalah vektor – vektor pada ruang yang sama
seperti terlihat pada gambar dibawah ini :
Vektor 𝑎̅disusun dari dua vektor yang saling tegak lurus yaitu 𝑤
̅̅̅̅1 dan
𝑤2
̅̅̅̅,jadi
dapat dituliskan 𝑎̅= 𝑤
̅̅̅1̅+ ̅̅̅̅
𝑤2 ,Dari proses pembentukannya 𝑤
̅̅̅̅juga
1
disebut sebagai vektor proyeksi orthogonal 𝑎̅ terhadap ̅𝑏karena merupakan
hasil proyeksi secara orthogonal vektor 𝑎̅terhadap ̅𝑏, sedangkan ̅̅̅̅disebut
𝑤2
sebagai komponen dari 𝑎̅ yang tegak lurus terhadap ̅𝑏.
Karena w1 merupakan hasil proyeksi di b maka dapat dituliskan 𝑤
̅̅̅1̅= k
̅𝑏,nilai k ini akan menentukan arah dan panjang dari 𝑤
̅̅̅1̅. Jika sudut antara
𝑎̅dan ̅𝑏, adalah tumpul , maka tentunya nilai k akan negatif ini juga berarti
arah𝑤
̅̅̅̅1 akan berlawanan dengan arah ̅𝑏.
A. Menghitung 𝑤
̅̅̅1̅
Untuk menghitung 𝑤
̅̅̅1̅, harus dihitung terlebih dahulu nilai k. Dengan
menggunakan aturan hasil kali titik , diperoleh :
𝑎̅. ̅𝑏
= (𝑤
̅̅̅1̅+ ̅̅̅̅
𝑤2 ) . ̅𝑏
̅𝑏‖(karena ̅̅̅̅
= ‖𝑤
̅̅̅̅‖‖
𝑤2 dan ̅𝑏saling tegak lurus maka 𝑤1.b = 0)
1
̅𝑏‖ cos 𝜃
= ‖𝑤
̅̅̅̅‖‖
1
= ‖𝑘 ̅𝑏 ‖‖ ̅𝑏‖ cos 𝜃 (sudut yang dibentuk adalah 0 atau 180 )
𝑎̅. ̅𝑏
Jadi 𝑘 = ̅
‖ 𝑏‖²
̅
𝑎̅. 𝑏
𝑤
̅̅̅1̅ = k ̅
𝑏 = ‖ ̅ ‖² ̅𝑏 dan ̅̅̅̅
𝑤2 = 𝑎̅ − 𝑤
̅̅̅1̅
𝑏
𝑎̅. ̅𝑏
Panjang dari 𝑤
̅̅̅̅1 adalah ̅
‖ 𝑏‖
1.7
Nilai Eigen dan Vektor Eigen
Sering kali dalam percakapan matriks pada persoalan fisika, kita
jumpai persamaan dalam bentuk Ax = 𝜆x
Dengan A = aij adalah matriks bujur sangkar berorde (n) dan λ
adalah suatu bilangan (skalar). Untuk solusu trival x=0 berapapun harga
𝜆akan memenuhi, dan biasanya solusi ini tidak banyak gunanya dalam
fisika.
Untuk solusi non-trival, yaitu x≠0, harga 𝜆 yang memenuhi
persamaan tersebut disebut nilai eigen, atau nilai karakteristik dari matriks
A dan solusi yang bersesuaian dengan persamaan yang diberikan Ax = 𝜆x
disebut vektor eigen atau vektor karakteristik dari A.
Bila persamaan tersebut dinyatakan dalam bentuk sistem
persamaan yang terpisah, kita peroleh.
a11 a12
a13⋯ a1n1
a11 a12
a13⋯ a1n1
⋮
⋮⋮
An1 an2
x1
x1
x2
⋮⋮
⋮
an3⋯ ann
xn
=
𝜆 x2
xn
Atau
a11x1+a12x2+a13x3+ ⋯+a1nxn = 𝜆x1
a21x1+a22x2+a23x3+ ⋯+a2nxn = 𝜆x2
a31x1+a32x2+a33x3+ ⋯+a3nxn = 𝜆x3
⋮
⋮⋮
⋮⋮
An1x1+an2x2+an3x3+ ⋯+anmxn = 𝜆x1
Bila ruas kanan dipindah ke ruas kiri, persamaannya menjadi
(a11-𝜆)x1 + a12x2
+ a13x3
+ ⋯ +a1nxn
=0
a21x1+ (a22-𝜆)x2
+ a23x3
+ ⋯ + a1nxn
=0
⋮
an1x1
⋮⋮
+an2x2
⋮⋮
+an3x3
+ ⋯+ (anm-𝜆)xn = 0
a12
a13
atau
(a11-𝜆)
|𝐴 − 𝜆I|=
a21
⋮
⋮⋮
A31
(a22-𝜆)
⋮
a32an2
⋮
⋯(anm-𝜆)
Jadi,
Ax = 𝜆x
⋯
a12
a1n
⋯a2n
Jika ruas kanan dipindahkan ruas kiri didapat,
(A-𝜆I)x=0
Perhatikan bahwa kita telah menyisipkan matriks satuan kedalam
persamaannya karena matriks hanya bisa dikurangi dengan matriks lagi.
Agar sistem persamaan linier homogen ini (yaitu semua konstantadi ruas
kanan sama dengan nol) mempunyai solusi non-trival, maka haruslah :
|𝐴 − 𝜆I|
|𝐴 − 𝜆I| disebut determinan karakteristik dari A, dan atau disebut
persamaan karakteristiknya. Dengan menjabarrkan determinan tersebut,
akan kita peroleh sebuah palinomial berderajat n dan pemecahan
karakteristiknya meberikan harga 𝜆 yaitu nilai eigen dari A.
1.8
Beberapa Teorema Mengenai Kombinasi Linier
Misalkan V adalah ruang vektor atas F dan S himpunan bagian V.
Kombinasi linear(linear combination) dari S adalah jumlahan berhingga
yang berbentuk a1v1 + a2v2 … + anvn dengan ai F dan viS, i=1,2,…,n.
Contoh : Misalkan S = {(1, 3, 1) , (2, 0, -1)}. Tentu S Ì Â3
Kombinasi linear dari S di antaranya adalah :
2 (1, 3, 1) + 1 (2, 0, -1) = (4, 6, 1)
1 (1, 3, 1) + 0 (2, 0, -1) = (1, 3, 1)
(4, -6, -6) adalah kombinasi linear dari S sebab
(4, -6, -6) = (-2) (1, 3, 1) + 4 (2, 0, -1)
(3, 1, 2) bukanlah kombinasi linear dari S, sebab tidak ada bilangan
real a dan b sehingga (3, 1, 2) = a (1, 3, 1) + b (2, 0, -1). Hal ini
dijelaskan sebagai berikut :
Andaikan (3, 1, 2) = a (1, 3, 1) + b (2, 0, -1) = (a + 2b, 3a, 2a-b).
Ini berarti a+2b=3, 3a = 1, dan 2a – b = 2. Padahal tidak ada bilangan real
yang memenuhi ketiga persamaan terakhir.
Misalkan dipunyai vektor-vektor v1 , v2 , … , vn V. Kombinasi
linear dari vektor-vektor tersebut antara lain a1v1 + a2v2 … + anvn , b1v1 +
b2v2 … + bnvn , g1v1 + g2v2 … + gnvn dengan ai , bi , gi adalah skalarskalar untuk i = 1, 2, .. , n. Kombinasi linear tersebut merupakan vektorvektor dalam V (mengapa ?). Jumlahan dua kombinasi linear dari v1 , v2 ,
… , vn juga merupakan kombinasi linear dari v1, v2, … , vn , demikian juga
sebarang kombinasi linear dari v1, v2, …,vn apabila dikalikan dengan
sebarang skalar juga merupakan kombinasi linear dari v1, v2
,
… , vn
(mengapa?). Akibatnya jika semua kombinasi linear tersebut dikumpulkan
dalam satu himpunan, maka himpunan yang terbentuk akan merupakan
ruang bagian dari ruang vektor V. Hal ini diberikan dalam teorema berikut
ini.
1.8
Vektor dalam Persoalan Fisika
Berikut ini diberikan beberapa contoh sederhana penggunaan
analisa vektor
dalam persoalan Fisika yang sering dijumpai.
• Posisi suatu benda pada saat t = 0 dinyatakan dengan r0 = 2i−3j+k.
Dalam selang waktu ∆t = 3 s perpindahan yang dialami benda adalah
∆r = −3i + 4j + 2k, maka posisi benda pada saat t = 3 s adalah
r(t = 3) = r0 + ∆r
= (2i − 3j + k) + (−3i + 4j + 2k)
= −i + j + 3k
Sebuah gaya F = i + 3j bekerja pada benda sehingga benda bergerak
lurus sejauh 2 m sepanjang sumbu x.
Besar usaha yang oleh gaya F terhadap benda adalah
W=F·r
= (i + 3j) · (2i)
= 2 joule
Sudut antara gaya F dengan arah perpindahan adalah
cos 𝜃 =
=
=
𝐹. 𝑟
|𝐹||𝑟|
2
(√12
2
2√10
= 𝑎𝑟𝑐𝑐𝑜𝑠 (
+ 32 )(√22 )
=
1
√10
10
1
√10)
10
Benda titik bermassa m = 2 kg bergerak sepanjang garis y = 2x + 3
dalam arah kuadran satu pada bidang koordinat xy dengan laju v = 3
m/s.
Arah gerak benda dapat dinyatakan menggunakan gradien persamaan
garis tersebut. Maka vektor satuan dalam arah garis tersebut adalah
𝑣̂ =
1 + 2𝑗
√5
Vektor kecepatan benda tersebut adalah
𝑣 = 𝑣𝑣̂ =
3
√5
(𝑖 + 2𝑗)
Momentum sudut terhadap suatu titik tertentu didefinisikan sebagai
L = r × p dengan p = mv adalah momentum linier benda dan rnadalah
vektor posisi benda dari titik acuan yang dimaksud. Misalkan posisi awal
benda adalah r0 = 3j, maka posisi benda tiap saat dapat dinyatakan sebagai
𝑟(𝑡) =
3𝑡
6𝑡
𝑖 + ( + 3) 𝑗
√5
√5
Sehingga momentum sudut terhadap titik pusat koordinat O adalah
𝑙=𝑟𝑥𝑝
=(
3𝑡
6𝑡
3
(𝑖 + 2𝑗))
𝑖 + ( + 3) 𝑗) 𝑥 (𝑚
√5
√5
√5
18𝑡𝑚 18𝑡𝑚 9𝑚
=(
−
−
)𝑘
5
5
√5
9𝑚
= ( )𝑘
√5
Sebuah benda bermassa m bergerak dengan kecepatan yang dinyatakan
dengan v = v0xi + v0yj
Energy kinetik tersebut adalah
1
𝑇 = 𝑚(𝑣. 𝑣)
2
1
= 𝑚(𝑣0𝑥 𝑖 + 𝑣𝑜𝑦 𝑗)
2
1
= 𝑚𝑣 2
2
Dalam persoalan kesetimbangan gaya seperti ditunjukkan dalam Gambar 1.15, kesetimbangan terjadi jika jumlah total gaya (ingat bahwa gaya
merupakan besaran vektor) sama dengan nol. Artinya, bila gaya-gaya
yang ada diuraikan pada sumbu-sumbu koordinat (misalnya sumbu x dan
sumbu y), maka resultan gaya pada arah sumbu x sama dengan nol dan
demikian juga halnya dengan resultan gaya pada arah sumbu y.
Agar titik O berada dalam keadaan setimbang, maka haruslah F1 +F2 + F3
= 0. Artinya jumlah gaya dalam arah sumbu x harus sama dengan nol,
ini memberikan
∑ 𝐹𝑥 = 𝐹1 cos 𝛼 − 𝐹2 cos 𝛽 = 0
Demikian halnya dengan jumlah gaya dalam arah sumbu y juga harus
sama dengan 0 yang berarti
∑ 𝐹𝑥 = 𝐹1 sin 𝛼 − 𝐹2 sin 𝛽 − 𝐹3 = 0
1.9
Aplikasi Rangkaian Listrik pada Hukum Kirchoff
Robert Gustav Kirchoff merupakan penemu Hukum Kirchoff I
yang dikenal dengan Kirchoff’s Current Law (KCL) dan Hukum Kirchoff
II yang dikenal dengan Kirchoff’s Voltages Law (KVL). Dimana Gustav
Kirchoff menyatakan bahwa “jumlah kuat arus listrik yang masuk ke suatu
titik percabangan sama dengan jumlah kuat arus yang keluar dari titik
percabangan tersebut” yang pernyataan ini dikenal dengan bunyi Hukum
Kirchoff I. Gustav Kirchoff juga menyatakan bahwa “Didalam suatu
rangkaian tertutup jumlah aljabar gaya gerak listrik dengan penurunan
tegangan sama dengan nol” yang kemudian dikenal sebagai Hukum
Kirchoff II.
Secaramatematis, dapatdituliskansebagaiberikut:
Σ𝐼𝑚𝑎𝑠𝑢𝑘=Σ𝐼𝑘𝑒𝑙𝑢𝑎𝑟𝐼1+𝐼2=𝐼3+𝐼4+𝐼5
HukumKircoff
II
secaramatematisdapatditulissebagaiberikut:
PadapenggunaanhukumKirhoff
II
padarangkaiantertutup
Σ𝜀+Σ𝐼𝑅=0
(loop)
terdapatbeberapaaturanpenting,
yaitu:
Pilih
loop
untukmasing-
masinglintasantertutupdenganarahtertentuKuatarusbertandapositif
(+)
jikasearahdengan loop danbertandanegatif (-) jikaberlawanandenganarah
loop.
Ketika mengikuti arah loop, kutub positif sumbertegangan dijumpai
lebih dahulu maka ε bertanda positif (+) dan sebaliknya.
Dalamrangkaiandengansatu
loop,
kuatarus
yang
mengaliradalahsamayaitusebesar I. Dimanaapabilapadarangkaianseperti yang
ditunjukkanolehgambar 3 dibuat loop a-b-c-d-a, makasesuaihukumKirchoff I
dapatditulis: Σ𝜀+Σ𝐼𝑅=0 𝜀2−𝜀1+𝐼 𝑅4+𝑟2+𝑅3+𝑟1 =0 Selainitu, ada pula
rangkaian
yang
memilikidua
loop
ataulebih,
dimanaprinsipnyasamadengansatu
teteapiharusdiperhatikankuataruspadasetiappercobaannya.
loop
loop,
Dimanajikadua
makadapatdiselesaikandengancaraberikutberdasarkangambar
4:
HukumKirchoff I: 𝐼1+𝐼2=𝐼 Loop I: 𝜀1+𝐼𝑟1+𝐼𝑅1+𝐼1𝑅2=0 𝜀1+𝐼 𝑟1+𝑅1
+𝐼1𝑅2=0 Loop
II:
𝜀2+𝐼2𝑟2−𝐼1𝑅2+𝐼2𝑅3=0 𝜀2−𝐼1𝑅2+𝐼2 𝑟2+𝑅3 =0
Terdapatberbagaimacamalatukurlistrikyaituamperemeter
yang
merupakansuatualatuntukmengukurkuataruslistrik
yang
melaluisuaturangkaianlistrikdan voltmeter yang merupakansuatualat yang
digunakanuntukmengukurkuataruslistrik
yang
melaluisuaturangkaianlistrikdan voltmeter yang merupakansuatualat yang
digunakanuntukmengukurteganganlistrikpadasuaturangkaianlistrik.
Amperemeter harus dipasang secara seri dengan bagian rangkaian
atau komponen listrik yang akan diukur kuat arusnya, sedangkan voltmeter
harus dipasang paralel dengan bagian rangkaian atau komponen listrik
yang akan diukur tegannya. (Halliday dan Resnick, 1991)
Contoh Soal
1.
Tunjukan bahwa v = (3,9,-4,-2) merupakan kombinasi linier u1 = (1,-2,0,3)
u2 = (2,3,0,-1) dan u3 = (2,-1,2,1)
Jawab :
Bila v merupakan kombinasi linier dari u1, u2, dan u3, maka dapat ditentukan
x, y, dan z sehingga :
V = xu1 + yu2 + zu3
(3,9,-4,-2) = x(1,-2,0,3) + y(2,3,0,-1) + z(2,-1,2,1)
(3,9,-4,-2) = (1x,-2x,0x,3x) + (2y,3y,0y,-1y) + (2z,-1z,2z,1z)
(3,9,-4,-2) = (x+2y+2z,-2x+3y-z, 2z,3x-y+z)
Diperoleh persamaan :
x+2y+2z = 3
-2x+3y-z = 9
2z = -4
3x-y+z = -2
x=1, y=3, dan z = -2
jadi v = u1+3u2 – 2u3
jika sistem persamaan di atas tidak memiliki penyelesaian maka v tidak
dapat dinyatakan sebagai kombinasi linier dari u1,u2,dan u3.
Diketahui v ruang vektor
dan S = (s1,s2,…………….sn)
s1,s2,…………….sn € V
S dikatakan membangun/merentang V bila untuk setiap v € V,
v merupakan kombinasi linier dari S, yaitu :
v = k1s1 + k2s2 + ………. + knsn
k1,k2,………kn adalah skalar.
2.
Dengan menggunakan definisi dari perkalian titik (dot product) bahwa 𝑖̂.𝑖̂
= 𝑗̂.𝑗̂ = 𝑘̂ .𝑘̂ = 1 dan 𝑖̂.𝑗̂ = 𝑗̂.𝑘̂ = 𝑘̂𝑖̂ = 0, buktikan bahwa r = |𝑟| = √𝑟.
⃗⃗⃗⃗⃗⃗⃗𝑟 akan
memberikan √𝑟𝑥2 + 𝑦𝑦2 + 𝑟𝑧2 uraikan dengan detail.
Jawab
Dengan 𝑟 = 𝑟𝑥 𝑖̂ + 𝑟𝑦 𝑗̂+ 𝑟𝑧 𝑘̂ maka
𝑟. 𝑟 = (𝑟𝑥 𝑖̂ + 𝑟𝑦 𝑗̂+ 𝑟𝑧 𝑘̂) . (𝑟𝑥 𝑖̂ + 𝑟𝑦 𝑗̂+ 𝑟𝑧 𝑘̂)
= 𝑟𝑥 𝑟𝑥 (𝑖̂ . 𝑖̂ ) + 𝑟𝑥 𝑟𝑦 (𝑖̂ . 𝑗̂) + 𝑟𝑥 𝑟𝑧 (𝑖̂ . ̂𝑘 )
+𝑟𝑦 𝑟𝑥 (𝑗̂ . 𝑖̂ ) + 𝑟𝑦 𝑟𝑦 (𝑗̂. 𝑗̂) + 𝑟𝑦 𝑟𝑧 (𝑗̂ . 𝑘̂)
+𝑟𝑧 𝑟𝑥 (𝑟𝑥 . 𝑖̂ ) + 𝑟𝑧 𝑟𝑦 ( ̂𝑘.𝑗̂) +𝑟𝑧 𝑟𝑧 (𝑘̂ . 𝑘̂)
= 𝑟𝑥 𝑟𝑥 (1) + 𝑟𝑥 𝑟𝑦 (0) + 𝑟𝑥 𝑟𝑧 (0)
+𝑟𝑦 𝑟𝑥 (0) + 𝑟𝑦 𝑟𝑦 (1) + 𝑟𝑦 𝑟𝑧 (0)
+𝑟𝑧 𝑟𝑥 (0) + 𝑟𝑧 𝑟𝑦 (0) +𝑟𝑧 𝑟𝑧 (1)
= 𝑟𝑥2 + 𝑦𝑦2 + 𝑟𝑧2
3. hitunglah besarnya vektor𝑝= 24𝑖̂ + 7𝑘̂ dan 𝑞 = 12𝑖̂ + 4𝑗̂ + 3𝑘̂
Jawab
Dengan menggunakan persamaan (2.1) dapat diperoleh bahwa
P= √242 + 02 + 72 = √576 + 0 + 49 = √625 = 25
Dan
q= √122 + 42 + 32 = √144 + 16 + 9 = √169 = 13
4. Lengkapilah tabel di bawah ini
Tabel 2.1 : pengurangan dan penjumlahan vektor (soal)
𝐴
⃗
𝐵
2𝑖̂ + 𝑗̂
𝑘̂
𝑖̂ - 𝑗̂- 𝑘̂
𝑘̂- 𝑗̂-𝑖̂
⃗
𝐴−𝐵
⃗
𝐴+𝐵
𝑘̂
𝑗̂+2𝑘̂ +3𝑖̂
Dengan menggunakan persamaan (2.2) ataupun (2.3) dapat diperoleh bahwa
Tabel 2.2 Pengurangan dan penjumlahan vektor
𝐴
⃗
𝐵
⃗
𝐴−𝐵
⃗
𝐴+𝐵
2𝑖̂ + 𝑗̂
𝑘̂
2𝑖̂ + 𝑗̂- 𝑘̂
2𝑖̂ + 𝑗̂+ 𝑘̂
𝑘̂
𝑖̂ - 𝑗̂- 2𝑘̂
𝑖̂ - 𝑗̂
𝑗̂+2𝑘̂ +3𝑖̂
- 2𝑖̂-𝑘̂
𝑖̂ - 𝑗̂- 𝑘̂
𝑘̂- 𝑗̂-𝑖̂
̂ - 2𝑗̂- 3𝑘̂
4𝑖
Pada pengurangan dan penjumlahan vektor berlaku pula hukum-hukum
penjumlahan seperti hukum komulatif
5.
Tentukan vektor yang tegak lurus terhadap vektor terhadap 𝑖̂ − 3𝑗̂ + 2𝑘̂ dan
5𝑖̂– 𝑗̂ − 4𝑘̂
Penyelesaian
𝑖̂
(𝑖̂ − 3𝑗̂ + 2𝑘̂) x (5𝑖̂– 𝑗̂ − 4𝑘̂) = |1
5
𝑗̂ 𝑘̂
−3 2|
−1 4
= 𝑖̂(12 + 2) + 𝑗̂(10 + 4) + 𝑘̂(−1 + 15)
= 14 𝑖̂ + 14𝑗̂ +14 𝑘̂
6. Tentukan kemiringan garis 𝑟 = (𝑖̂ − 𝑗̂ )+t (2𝑖̂ + 𝑗̂ )
Penyelesaian
Dari persamaan 𝑟 = (𝑖̂ − 𝑗) + t (2𝑖̂ + 𝑗̂ ) kita peroleh
𝑟𝑜 = 𝑖̂ − 𝑗̂ dan 𝐴 = 2𝑖̂ + 𝑗̂
⃗⃗⃗
Atau titik yang dilewati adalah titik (1,-1) dan garis sejajar dengan vektor 𝐴 =
2𝑖̂ + 𝑗̂. Jadi kemiringan garis sama dengan kemiringan vektor.
tan 𝛼 =
𝑦 1
=
𝑥 2
7. Tentukanpersamaan bidang yang mengandung dua buah garis sejajar yaitu
garis yang melalui titik (5,-4,2) dan garis 𝑟 = 𝑖̂ − 𝑗̂ + (5𝑖̂ − 2𝑗̂ + 𝑘̂ )𝑡
Penyelesaian
Garis pertama ⃗⃗⃗
𝑟1 = 𝑖̂ − 𝑗̂ + (5𝑖̂ − 2𝑗̂ + 𝑘̂)𝑡 adalah garis melalaui titik (1,-1,0)
dan sejajar dengan vektor 𝐴 = (5𝑖̂ − 2𝑗̂ + 𝑘̂)𝑡. Garis kedua ⃗⃗⃗
𝑟2 sejajar dengan
garis ⃗⃗⃗
𝑟1dan ⃗⃗⃗
𝑟2 mempunyai arah 𝐴 = (5𝑖̂ − 2𝑗̂ + 𝑘̂)𝑡. Dengan demikian,
persamaan garis ⃗⃗⃗
𝑟2 yang melalui titik (5,-4,2) dan
𝑟2 = (5𝑖̂ − 4𝑗̂ + 2𝑘̂)+(5𝑖̂ − 2𝑗̂ + 𝑘̂)𝑡. Tarik vektor ⃗⃗⃗
⃗⃗⃗
𝑟3 dari titik (5,-4,2) pada
garis kedua titik (1,-1,0) pada garis pertama.
𝑟3 = (1-5)𝑖̂ +(-1+4)𝑗̂+(0-2)𝑘̂ = -4𝑖̂ +3𝑗̂ -2𝑘̂
⃗⃗⃗
𝑟3 juga terletak pada bidang. Sedangkan kita dapat mencari vektor normal
⃗⃗⃗
pada bidang melakukan operasi cross antara 𝐴 dan ⃗⃗⃗
𝑟3 sebagi berikut :
𝑖̂
𝑗̂
⃗ = |5 2
𝑁
−4 3
𝑘̂
1 |= 7𝑖̂ + 6𝑗̂ − 23𝑘̂
−2
Persamaan pada bidang dimana kedua garis ⃗⃗⃗
𝑟1⁄⁄ ⃗⃗⃗
𝑟2
𝑎(𝑥 − 𝑥0 ) + 𝑏(𝑦 − 𝑦𝑜 ) + 𝑐(𝑧 − 𝑧𝑜 )=0
−7(𝑥 − 5) + 6(𝑦 + 4) − 23(𝑧 − 2) = 0
−7𝑥 + 6𝑦 − 23𝑧 = −23
⃗ dari massa myang diputar dengan sudut.
8. Tentukan momentum sudut, 𝐿
Perhatikan Gambar :
⃗ dirumuskan sebagai :
Kita mengetahui momentum sudut 𝐿
⃗ =𝑟 × 𝑚𝑣 = 𝑚𝑟 × 𝑣
𝐿
Substitusikan
𝑣= 𝜔
⃗ × 𝑟
Kedalam persamaan, diperoleh momentum sudut dalam bentuk perkalian tiga
vektor yang menghasilkan vektor,
⃗ =𝑟 × 𝑚𝑣 = 𝑚𝑟 × 𝑣 = m𝑟 × (𝜔
𝐿
⃗ × 𝑟)
9. Diberikansebuahrangkaian yang terdiridariduabuah loop dengan data
sebagaiberikut :
E1 = 6 volt
E2 = 9 volt
E3 = 12 volt
Tentukan :
a)
b)
c)
d)
Kuatarus yang melalui R1 , R2 dan R3
Beda potensialantaratitik B dan C
Beda potensialantaratitik B danD
Dayapadahambatan R1
Penyelesaian:
a) Kuatarus yang melaluiR1 , R2 dan R3
Langkah-langkahstandar :
Menentukanaraharus
Menentukanarahloop
Masukkanhukumkirchoffarus
Masukkanhukumkirchofftegangan
Menyelesaikanpersamaan yang ada
Misalkanaraharusdanarah loop sepertigambarberikut
𝐼3 = 𝐼1 + 𝐼2
Loop 1
∑ 𝐸 + ∑ 𝐼𝑅 = 0
−𝐸1 + 𝐸2 + 2𝐼1 + 3𝐼3
−6 + 9 + 2𝐼1 + 3𝐼1 + 3𝐼2 = 0
5𝐼1 + 3𝐼2 + 3 = 0
(persamaan I)
Loop II
∑ 𝐸 + ∑ 𝐼𝑅 = 0
−𝐸3 + 𝐸2 + 6𝐼2 + 3𝐼3 = 0
−12 + 9 + 6𝐼2 + 3𝐼1 + 3𝐼2
3𝐼1 + 9𝐼2 − 3 = 0
Persamaan II
Gabungan persamaan I dan II :
5𝐼1 + 3𝐼2 + 3 = 0 |× 3|
3𝐼1 + 9𝐼2 - 3 = 0 |× 1|
15𝐼1 + 9𝐼2 + 9 = 0
3𝐼1 + 9𝐼2 - 3 = 012𝐼1 + 12 = 0
𝐼1 = -1 A
3𝐼1 + 9𝐼2 − 3 = 0
3(−1) + 9𝐼2 − 3 = 0
9𝐼2 = 6
𝐼2 =
6 2
= 𝐴
9 3
2
1
𝐼3 = 𝐼1 + 𝐼2 = (−1) ( ) = −
3
3
b) Beda Potensial Antara titik b dan c
𝑉𝐵𝐶 = ∑ 𝐸 + ∑ 𝐼𝑅 = 𝐸2 + 3𝐼3
1
𝑉𝐵𝐶 = 9 + 3 (− ) = 8 𝑉𝑜𝑙𝑡
3
c) Beda potensial antara titik B dan D
𝑉𝐵𝐶 = ∑ 𝐸 + ∑ 𝐼𝑅 = 𝐸3 + 6(−𝐼2 )
2
𝑉𝐵𝐶 = 9 + 6 (− ) = 12 − 4 = 8 𝑉𝑜𝑙𝑡
3
d)Dayahambatan R1
𝑃 = 𝐼 2 𝑅 = (1)2 (2) = 2 𝑤𝑎𝑡𝑡
10. Dari gambar di sampingdiketahui E1, E2, dan E3masing-masing 6 volt, 12 volt, dan
3 volt, serta R1,R2,R3, dan R4masing-masing 2 ohm, 3 ohm, 5 ohm, dan 1 ohm.
Berapadanbagaimanakaharuspadarangkasian ?
Jawab :
Kita misalkanaraharusmenurutluptertutup ABCDA maka :
-(E1) + E2 – E3 + i (R1 + R2 + R3 + R4) = 0
-(6) + 12– 3+ i (2 + 3+ 5+ 1) = 0
3 + 11i = 0
i = 0,27A (negatif)
Jadi, penentuanaraharussemuladari ABCDA adalahsalah, yang benaradalaharah
ADCBA besarnya 0,27 A.