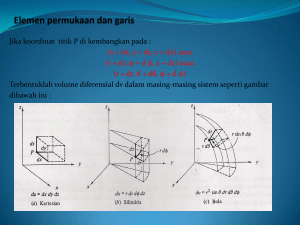
6. transformasi linier
advertisement

6. TRANSFORMASI LINIER
1. Definisi Transformasi Linier
Jika F:V→W adalah sebuah fungsi dari ruang vektor V ke dalam ruang vektor W, maka F
disebut transformasi linier (pemetaan linier), jika:
1. F(u+v) = F(u) + F(v), untuk semua vektor u dan v di V
2. F(ku) = kF(u) untuk semua vektor u di dalam V dan semua skalar k
Contoh:
Misalkan F:R2→R3 adalah sebuah fungsi yang didefinisikan oleh:
F(x,y) = (x,x+y,x-y)
Buktikan bahwa F adalah transformasi linier.
Jawab:
Misalakan u = (x1, y1) dan v = (x2, y2), maka u + v = (x1+ x2, y1 + y2),
F(u) = F(x1, y1) = (x1, x1 + y1, x1 - y1)
F(v) = F(x2, y2) = (x2, x2 + y2, x2 - y2)
F(u) + f(v) = (x1, x1 + y1, x1 - y1) + (x2, x2 + y2, x2 - y2)
= (x1+ x2, x1+ x2 + y1 + y2 , x1+ x2 - y1 - y2)
Dan,
F(u+v) = (x1+ x2, [x1+ x2] + [y1 + y2] ,[ x1+ x2] – [y1 + y2]
= (x1+ x2, x1+ x2 + y1 + y2 , x1+ x2 - y1 - y2)
= F(u) + F(v) syarat (i) dipenuhi
Misalkan k adalah sebuah skalar, ku =n(kx1, ky1), maka:
F(ku) = (kx1, kx1 + ky1, kx1 - ky1)
= k(x1, x1 + y1, x1 - y1)
= k F(u) syarat (ii) dipenuhi
Jadi F adalah transformasi linier
Contoh:
Proyeksi: L : R3 → R2 didefinisikan oleh:
L(* +)
* +
L adalah transformasi linier karena:
1. Untuk setiap u = [
], v=[ ],
])=*
L(u+v) =L([
+= *
+
* +
([
])
([ ])
( )
( )
2. Untuk k ϵ R ,
])
L(ku) = L([
[
]
*
+
([
])
( )
2. Matriks Penyajian untuk Transformasi Linier
Misalkan T:Rn→Rm adalah transformasi linier dari ruang vektor real V ke ruang real
vektor W, bila V dan W berdimensi berhingga, maka transformasi linier tersebut dapat
dinyatakan dengan suatu matriks, yangdisebut matriks penyajian (representasi matriks)
Misalkan e1, e2, …, en adalah basis baku untuk Rn dan misalkan A adalah sebuah matriks
mxn yang dibentuk oleh T(e1), T(e2), …, T(en) sebagai vektor-vektor kolomnya, maka A
disebut sebagai matriks penyajian atau matriks baku.
Contoh:
Misalkan T:R2→R2diberikan oleh:
T(* +)
[
]
Maka
T(e1) =
Jadi A = *
(* +)
* +
dan
T(e2) =
(* +)
+ adalah matriks penyajian untuk T di atas.
Contoh:
Misalkan T:R2→R3 diberikan oleh:
*
+
T(* +)
[
]
Maka
T(e1) =
Jadi A = *
(* +)
* +
dan
T(e2) =
(* +)
* +
+ adalah matriks penyajian untuk T di atas.
Latihan:
Misalkan T:R3→R2diberikan oleh:
T(* +)
[
]
3. Vektor Koordinat dan Perubahan Basis
Selama in kita sering menggunakan basis baku sebagai basis semua vektor. Padahal selain
basis baku, ada basis-basis lain yang bisa digunakan untuk menyatakan sebuah vektor.
Beberapa contoh basis baku:
Basis baku di ruang R2: e1 = * + e2 = * +
Basis baku di ruang R3: e1 = * +
e2 = * +
e3 = * +
Dan seterusnya.
Misalkan B = { e1, e2, …, en} adalah basis baku untuk Rn dan sebuah titik X adalah
sebuah vektor yang dibentuk oleh kombinasi linier dari basis tersebut, maka:
X = x1e1 + x2e2 + … + xnen
X = (x1, x2, …, xn) disebut vektor koordinat relatif terhadap basis B.
Bagaimana bila titik X tersebut dilihat dari basis lain (basis B’ misalnya)? Cara pandang
sebuah titik vektor X dari basi B ke basis lain B’ ini disebut perubahan basis. Artinya bila
kita berada di acuan basis B, kemudian memandang titik X, tentu saja hasilnya akan
berbeda dengan bila kita berada pada acuan basis B’, kemudian memandang titik X.
perhatikan gambar di bawah ini. Titik X bila dipandang dari basis B mempunyai
koordinat (6,3), tetapi bila dilihat dari basis B’ berada di koordinat (4,1). Hal ini terjadi
karena perubahan basis.
B’
B
4
4
2
X
E2
2
e2
0
0 e1
E1
2
2
4
6
4
6
8
Contoh:
Tinjau R3 dengan basis B = {e1, e2, e3} dan basis B’ = {E1, E2, E3} dengan E1 = (1,0,1), E2
= (1,1,-1) dan E3 = (0,1,2).
a. Sebuah titik X terhadap basis B mempunyai vektor koordinat (2,7,0). Tentukan vektor
koordinat X terhadap basis B’.
b. Biala titik X mempunyai vektor koordinat (1,-2,3) terhadap basis B’, tentukan vektor
koordinat X terhadap basis B.
Penyelesaian:
a. Kombinasi linier vektor koordinat X terhadap basis B harus sama dengan kombinasi
linier vektor koordinat X terhadap basis B’.
2e1 + 7e2 + 0.e3 = x1E1 + x2E2 + x3E3
[ ]
[ ]
[ ]
[ ]
[
]
[ ]
Maka x1, x2, x3 memenuhi sistem persamaan linier
[ ]
[
][ ]
Berdasarkan persamaan tersebut dan setelah melalui perhitungan diperoleh:
[ ]
[
]
b. Kombinasi linier vektor koordinat X terhadap basis B harus sama dengan kombinasi
linier vektor koordinat X terhadap basis B’.
x1e1 + x2e2 + x3e3 = 1.E1 – 2.E2 + 3.E3
[ ]
[ ]
[ ]
[ ]
[
]
[ ]
Maka x1, x2, x3 memenuhi sistem persamaan linier
[ ]
[
][
]
Berdasarkan persamaan tersebut dan setelah melalui perhitungan diperoleh:
[ ]
[
]
Latihan:
Diketahui dua buah basis di R3 berikut:
B = {(1,0,1), (0,1,-1), (1,2,0)}
B’ = {(1,0,0), (-1,1,0), (1,-1,-1)}
Bila vektor koordinat X = (2,4,1) terhadap B, tentukan koordinat X terhadap B’.
Latihan soal:
1. Tunjukkan apakah transformasi berikut adalah transformasi linier atau bukan.
a. F(x,y) = (2x, 3y)
b. F(x,y) = (2x + y, 3x – 4y)
c. F(x,y,z) = (1, 3)
d. F(x,y,z) = (2x + 5y, 3y – 4z)
2. Tentukan matriks penyajian untuk transformasi berikut:
a. T(* +)
[
]
b. T(* +)
[
]
3. Tinjau R3 dengan basis B = {e1, e2, e3} dan basis B’ = {E1, E2, E3} dengan E1 = (-1,0,1),
E2 = (-1,1,1) dan E3 = (2,1,0).
a. Sebuah titik X terhadap basis B mempunyai vektor koordinat (2,4,1). Tentukan
vektor koordinat X terhadap basis B’.
b. Bila titik X mempunyai vektor koordinat (4,2,3) terhadap basis B’, tentukan vektor
koordinat X terhadap basis B.
4. Diketahui dua buah basis di R3 berikut:
B = {(2,0,1), (0,1,-2), (1,1,0)}
B’ = {(1,0,1), (-2,1,1), (1,0,-1)}
a. Bila vektor koordinat X = (2,0,1) terhadap B, tentukan koordinat X terhadap B’.
b. Bila vektor koordinat X = (3,2,5) terhadap B’, tentukan koordinat X terhadap B.