Sistem Pengukur Pergeseran Cermin pada Interferometer
advertisement

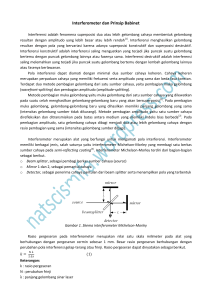
Sistem Pengukur Pergeseran Cermin pada Interferometer Michelson Berbasis Mikrokontroler M. Yusuf Fakhri, Prawito, dan Lingga Hermanto Departemen Fisika, FMIPA UI, Kampus UI Depok1642 [email protected] Abstrak Interferometer Michelson merupakan alat optik yang biasa digunakan untuk mengukur panjang gelombang cahaya dan indeks bias medium. Dalam pengukurannya, kita biasa menjumpai kesulitan dalam menggeser cermin serta mengamati perubahan pola terang gelap. Untuk mengatasinya, dibuatlah suatu sistem penggeser cermin yang dikendalikan mikrokontroler. Pergeseran dengan mikrometer sekrup, yang dikendalikan dengan motor DC, masih menunjukkan pergeseran dengan ketelitian 1µm. Untuk mengatasinya, sistem pergeseran memanfaatkan pemuaian logam untuk menggeser cermin. Penelitian ini menunjukkan dua sistem pergeseran cermin, yaitu model motor DC dan model pemuaian logam, masing-masing model ini akan dibandingkan. Untuk mengamati perubahan pola terang dan gelap digunakan sensor cahaya fotodioda. Model motor DC unggul pada kecepatan pengambilan data, sehingga sistem ini mampu mendeteksi perubahan terang gelap (sebagai jumlah cacahan) sebanyak 10564 dalam satu detik. Model pemuaian logam menggunakan sensor temperatur (LM35) untuk mengukur temperatur logam yang dipanaskan dan menghitung pemuainnya sebagai pergeseran cermin. Model ini dapat menggeserkan cermin dengan ketelitian alat ukur mencapai 0,085 µm, dimana resolusi ini berasal dari temperatur yang dideteksi LM35. Kata kunci : Interferometer, mikrokontroler, sistem, dan resolusi Abstract Michelson interferometer is an optical instrument that used to measure wavelengths of light and index of refraction. In the moment of measurement, we always encounter difficulties to move the moveable mirror and observe the changing of the center dark-light patterns. So, the system to move mirror that controlled by microcontroller is created. Moving the mirror with micrometer screw, which is controlled by a DC motor, still shows a shift with 1µm of resolution. The movement system is utilizing the metal expansion to move the mirror. This experiment demonstrate two of the movement system, the DC motor model and metal expansion model, each of these models will be compared. To observe the changing patterns of light and dark, photodiode sensor is used. DC motor model excel at the speed of data retrieval, so the system is capable of detecting changes dark-light patterns (as counter) as much as 10564 data in one second. Metal expansion model is using a temperature sensor (LM35) for measuring the temperatur of heated metal and calculate the expansion as the movement of mirror. This model can move the mirror with instrument resolution reached 0.085 µm, where the resolution is derived from the detected temperature of the LM35. Keyword : Interferometer, microcontroller, system, and resolution I. PENDAHULUAN. Pola interferensi dari suatu gelombang muncul karena adanya pertemuan dua gelombang yang akhirnya termodulasi. Hasil modulasi ini menunjukkan amplitudo gelombang yang maksimum dan minimum. Karena cahaya memiliki sifat gelombang, pola interferensi dapat terbentuk dari cahaya. Pola interferensi pada interferometer Michelson disebabkan karena perbedaan lintasan optik cahaya. Interferometer Michelson memanfaatkan dua cermin dalam menunjukan pola interferensi cahaya, untuk mengabungkan cahayanya digunakan pemecah sinar (Beam Splitter). Umumnya percobaan ini hanya menggunakan dua buah cermin, pemecah sinar dan sumber cahaya. Sumber cahaya yang digunakan biasa menggunakan laser. Laser memiliki lintasan yang lurus dan terfokus pada satu titik, sehingga dalam percobaanya perlu menggunakan lensa untuk memperbesar hasil interferensinya. Cahaya yang bersal dari sumber akan terbagi dua oleh pemecah sinar, setengah diteruskan dan setengah dilewatkan. Cahaya tersebut akan dipantulkan cermin dan bertemu kembali ke pemecah sinar. Cahaya yang saling bertemu akan menunjukkan pola interferensi jika jarak masingmasing cermin ke pemecah sinar berbeda. Interferometer konvensional terkendala dalam kondisi tertentu seperti getaran, atau sentuhan yang mempengaruhi pergerakkan cermin. Hal ini akan membuat pola interferensi yang tergambar tidak jelas. Kesulitan pada interferometer michelson terletak pada saat melakukan pengukuran dengan mengamati pembentukkan pola terang gelap pusat. Jika mikrometer sekrup diputar terlalu cepat, akan terjadi kesulitan dalam membaca pergerakkan pola terang gelap pusat tersebut. Selain itu, percobaan interferometer yang dilakukan pada ruang gelap akan terkendala dalam mengamati pengukurannya. Untuk mengatasi hal tersebut, sensor cahaya dan mikrokontroller dapat dimanfaatkan. Motor DC dapat dimanfaatkan untuk mengendalikan putaran mikrometer sekrup. Tetapi, hal ini masih terkendala dalam besar pergeserannya. Untuk menghasilkan pergeseran yang sangat rendah dapat dimanfaatkan pemuaian logam yang dapat menghasilkan sebuah dorongan terhadap cermin. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 II. METODE PENELITIAN Terdapat dua syarat untuk menampilkan cincin interferensi, pertama cahaya harus diperbesar untuk memperjelas cincin. Jika sumber yang digunakan merupakan sumber titik, seperti laser, atau sumber dengan slit, cahaya yang tergambar pada detektor tidak memperlihatkan cincin interferensi. Kedua, sumber cahaya yang digunakan harus monokromatik atau mendekatinya. Pada gambar 1, bagian yang terpenting dalam susunan interferometer adalah dua buah cermin datar M1 dan M2 dan sebuah cermin setengah perak O (halfsilvered mirror), atau disebut sebagai beam splitter. Cahaya yang bergerak munuju beam splitter O akan dipantulkan ke M2 dan ditansmisikan ke M1.Cermin M1 dan M2 akan memantulkan cahaya yang terpisah tersebut menuju ke beam splitter kemudian ke detektor. Cermin M1 disebut sebagai cermin gerak sedangkan M2 sebagai cermin tetap. Jarak antara M2 dengan O adalah tetap, sedangakan M1 dapat berubah. Untuk memperbesar cincin interferensi dapat digunakan lensa divergen D. Gbr 2. Formasi pembentukan cincin interferensi pada interferometer Michelson Gbr 3. Pola interferensi pada eksperimen interferometer Michelson. Saat M1 digerakkan secara perlahan mendekati beam splitter, radius cincin terang pusat akan semakin mengecil. Jika diteruskan, cincin terang pusat akan menghilang. Kehilangan cincin terang pusat kemudian muncul kembali menunjukkan cos ! = 1, sehingga persamaan menjadi 2! = !" m merupakan banyaknya pola terang yang muncul akibat pergeseran cermin sebesar d. Gbr 1. Susunan Interferometer Michelson. Formasi penyusunan cermin tersebut dapat digambarkan seperti gambar 2. Formasi ini menggambarkan sumber cahaya P bergerak menuju bayangan cermin M2’ kemudian dipentulkan ke detektor yang digambarkan sebagai mata. Cahaya juga ditansmisikan ke M1 dan dipantulkan kembali ke mata. Mata akan menerima cahaya yang seakan-akan berasal dari sumber P’ dan P’’. Pola interferensi yang terbentuk menggambarkan sebuah lingkaran terang dibagian tengah dari cincincincin interferensi yang diperlihatkan pada gambar 3. Keadaan dari terang pusat ini disebut sebagai maxima, dan pembentukkannya tergantung θ yang dapat ditunjukkan pada persamaan 2! cos ! = !" Gbr 4. Sketsa susunan komponen interferometer michelson yang dirancang pada penelitian. Gambar 4 memperlihatkan susunan interferometer penelitian ini. Susunan interferometer michelson pada penelitian ini menempatkan cermin dan laser mengelilingi beam splitter. Beam splitter yang digunakan berbentuk dua prisma yang saling menempel dibagian alasnya. Dari bentuk beam splitter tersebut, susunan cermin tetap (fixed mirror) berhadapan dengan detektor, kemudian cermin gerak (movable mirror) Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 akan berhadapan dengan lensa. Lintasan laser dari sumber ke cermin gerak saling tegak lurus dengan cermin tetap dan detektor. Mekanisme pergerakkan cermin hanya difungsikan untuk maju dan mundur, walaupun komponen mekanik cermin yang terpasang dapat diatur kemiringannya. Pada umumnya, cermin bergerak ini didesain seperti cermin tetap yang mampu diatur kemiringannya. Cermin tersebut ditancapkan dengan sebuah alat pendorong yang halus, seperti mikrometer sekrup. Pergerakkan maju dan mundur ini tidaklah sembarangan, karena pergerakkan tersebut haruslah halus dan menunjukkan batas pergeseran skala mikrometer. Oleh karena itu, mekanik cermin gerak memanfaatkan mikrometer sekrup dan pemuaian logam. menghasilkan dorongan atau pergeseran cermin yang sangat kecil. Bagian tengah logam akan dibungkus oleh kotak pemanas (chamber), kemudian salah satu ujungnya dikunci hingga besarnya dorongan sebanding dengan besarnya pemuaian logam. Ujung dari logam ditempelkan dengan bahan isolator agar panas logam tidak menyebar. a. Mekanik Cermin Gerak Sketsa mekanik cermin gerak yeng memanfaatkan motor DC dapat dilihat pada gambar 5. Pada mekanik ini, maju dan mundurnya cermin akan dikendalikan dengan motor DC. Untuk menghasilkan pergeseran yang sangat kecil, putaran motor DC dihubungkan dengan putaran sekrup dari mikrometer. Penghubungan ini dapat dilakukan dengan menggunakan belt atau karet roda. Gbr 6. Sketsa alat pergeseran cermin dengan pemuaian logam. Potensiometer yang terpasang berfungsi untuk mengkalibrasi pemuaian logam. Pada saat pengujian dengan susunan interferometer michelson, beban potensiometer akan dilepas. Beban yang terpasang pada potensiometer dapat menimbulkan getaran, sehingga pengujian percobaan tidak dapat maksimal. Sketsa bagian heater mekanik ini dapat dilihat pada gambar 7. Logam yang digunakan memiliki panjang sebesar 15 cm. Di bagian dalam pemanas terdapat filamen yang meliliti logam. Filamen tersebut dapat memanaskan logam dengan diberikan tegangan DC sebesar 12V. Gbr 5. Sketsa alat pergeseran cermin dengan motor. Cermin ditempelkan pada mikrometer yang telah dirancang untuk menghasilkan sistem dorongan linier dari putaran ujung batang mikrometer. Dorongan linier ini sangat halus karena berada dalam skala pergeseran mkrometer. Bagian sekrup mikrometer dihubungkan dengan belt, berbahan karet, yang terhubung dengan motor untuk membuat putaran sekrup terkendali dengan mikrometer. Mekanik yang memanfaatkan pemuaian logam kuningan dan besi dapat dilihat pada gambar 6. untuk Gbr 7. Bagian dalam kotak pemanas yang dibuat. Selain filemen, sensor suhu, seperti LM35 juga ditancapkan. Filamen dan sensor dibungkusi dengan Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 batu api (fire brick) yang dapat bertahan hingga mencapai temperatur diatas 600oC. Batas pemanasan filamen dibawah 100oC untuk menghindari kerusakan LM35. Batu api mudah sekali hancur, sehingga untuk menghindari kehancurannya dapat dibungkusi dengan lapisan yang ringan dan kuat seperti alumunium foil. Alumunium foil tidak menyentuh logam, kabel LM35 dan filamen. b. Sensor yang Digunakan Fotodioda berfungsi untuk membaca pola terang gelap interferensi yang telah ditampilkan. Fotodioda digunakan untuk mengukur intensitas cahaya dari pola terang dan gelap interferensi, tujuanya adalah untuk membedakan pola tersebut. Rangkaian fotodioda untuk menjalani fungsi tersebut dapat dilihat pada gambar 8. Intensitas cahaya yang mengenai fotodioda akan menyebabkan peningkatan arus balik. Dengan dipasangnya R1, sinyal keluaran dari rangkaian adalah tegangan yang bergantung terhadap arus balik tersebut. Gbr 8. Rangkaian fotodioda. Untuk meningkatkan sensitifitas fotodioda dalam menanggapi perbedaan pola terang dan gelap interferensi, rangkaian dapat ditambahkan transistor seperti rangkaian gambar 9. Transistor akan menguatkan arus fotodioda yang mengalir akibat cahaya yang mengenainya. Rangkaian transistor yang digunakan merupakan rangkaian commen-collector, dimana rangkaian ini akan menghasilkan respon kenaikan tegangan output yang sesuai dengan kenaikan intensitas cahaya. Gbr 9. Rangkaian fotodioda dengan commen-collector. Gbr 10. Skematik LM35. LM35 merupakan sensor temperatur yang memiliki kemampuan pembacaan suhu yang presisi. Skematik LM35 dapat dilihat pada gambar 10. LM35 dapat menghasilkan keluaran tegangan yang stabil dan linier dengan kenaikan temperatur dalam satuan derajat celcius. Sensor ini memiliki nilai sensitifitas yang stabil. Dalam pemakaiannya tidak perlu menggunakan pengkondisi sinyal seperti filter, jika sensor hanya digunakan untuk mengukur temperatur biasa. LM35 memiliki kelemahan pada pengukuran temperatur yang tinggi, sehingga LM35 hanya digunakan pada temperatur dibawah 100oC. Potensiometer dapat berguna untuk mengukur posisi, baik posisi angular ataupun linier. Frictionless potensiometer memiliki keunggulan dalam mengukur pergeseran yang sangat kecil. Potensiometer ini memiliki resolusi yang lebih baik dibandingkan dengan potensiometer yang lainnya. Selain itu, perubahan resistansi potensiometer linier dengan putarannya. AD620 merupakan instrumentasi amplifier yang dikemas dalam bentuk IC. AD620 difungsikan untuk memperkuat tegangan keluaran dari potensiometer. Potensiometer yang diperkuat dengan AD620 dapat memiliki sensitifitas yang tinggi dalam mendeteksi pergeseran. Gambar 11 menunjukkan rangkaian AD620 dengan input merupakan output dari potensiometer. Perubahan tegangan output potensiometer dalam mengukur pergeseran dibawah 1mm sangat kecil sekali. Dengan AD620 yang dapat menghasilkan gain diatas 10, tegangan tersebut dapat diperbesar. Pergeseran kecil pada potensiometer akan lebih mudah untuk dideteksi. Gambar 11. Skematik rangkaian potensiometer dengan AD620. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 c. Aplikasi Mikrokontrol dan Programnya Blok diagram elektrik dari mikrokontrol pada mekanik motor DC dapat dilihat pada gambar 12. Pengendalian posisi cermin motor hanya membutuhkan sensor optical encoder. Data sensor yang akan dikirim ke mikrokontrol hanyalah sinyal optical encoder dan fotodioda. Pergerakkan motor akan dikendalikan dengan IC L298. IC ini dapat berfungsi sebagai saklar tegangan suplai motor DC serta untuk menguatkan tegangan mikrokontrol yang sangat kecil. Untuk optical encoder, port interrupt dapat dimanfaatkan. Port ADC akan dihubungkan dengan fotodioda. LCD terpasang pada port C dan akan digunakan untuk menampilkan informasi dari pergeseran cermin serta cacahan optical encoder. munculnya pola tersebut sebagai cacahan fotodioda. Program cacahan ini dibuat untuk menghitung banyaknya pola terang yang telah melewati fotodioda. Tiap pola terang yang melewatinya akan mengakibatkan perubahan tegangan fotodioda. Perubahan ini akan dimanfaatkan sebagai informasi penambahan cacahan / counter sebesar satu. Kelemahan dari program ini adalah tidak dapat mendeteksi perubahan intensitas pusat jika cermin bergerak maju dan kemudian bergerak mundur saat pengukuran, sehingga cacahan tetap terus bertambah. Pada flow chart tersebut, program dibuat untuk mendeteksi satu cincin pola terang. Untuk dapat mendeteksi satu terang yang melewati fotodioda, interrupt mikrokontrol dimanfaatkan untuk mendeteksi falling edge atau penurunan tegangan output fotodioda akibat perubahan intensitas maksimum ke minimum. Pencacahan akan selesai sampai pergeseran yang diinginkan. Gbr 12. Blok diagram sistem elektrik dengan mikrokontroller untuk pengukuran dengan motor DC. Program desain ini akan mengukur banyaknya pola terang yang melewati fotodioda dari pergeseran cermin tertentu. program ini akan menggerakkan cermin menjauhi beam splitter dengan kecepatan yang divariasikan. Program hanya akan menampilkan cacahan fotodioa dari pergeseran yang ditetapkan. Cara kerja program ini digambarkan dengan flow chart yang dapat dilihat pada gambar 13. Gbr 14. Blok diagram sistem elektrik dengan mikrokontroller untuk pengukuran dengan temperatur. Gambar 14 menunjukkan blok diagram elektrik dari mikrkokontroller yang diaplikasikan untuk mekanik dengan pemuaian logam. Pada rangkaian mikrokontroller ini terdapat tiga port ADC yang dibutuhkan untuk membaca nilai analog sensor. Nilai analog ini berasal dari fotodioda, LM35, dan potensiometer. Potensiometer digunakan untuk kalibrasi pemuaian logam. Aktuator pada percobaan ini merupakan pemanas yang dikendalikan dengan IC L298. LCD dipasang pada port C dan digunakan untuk menunjukkan nilai pemuaian dan temperatur. Gambar 15 menunjukkan flow chart yang menggambarkan cara kerja dari program ini. Skrip dari program ini dapat dilihat lampuran B yaitu mengenai program pengukuran interferometer Michelson dengan pemanasan logam. Program ini hanya akan mengukur besarnya pergeseran cermin yang dipanaskan tiap cacahan fotodioda yang muncul. Besarnya pemuaian logam dapat diketahui dari temperatur logam yang dipanaskan. Program akan mencatat nilai temperatur tiap cacahan fotodioda. Setalah mencapai cacahan yang diinginkan, program akan menampilkan nilai pergeseran ditiap cacahan. Gbr 13. Flow chart pengukuran interferometer Michelson dengan motor DC. Pada flow chart tersebut terdapat program untuk mengamati pola terang gelap pusat dan mencatat Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 Tabel 2. Lima data tegangan output fotodioda dalam menanggapi pola gelap interferensi laser merah dengan rangkaian yang menggunakan transistor III. HASIL EKSPERIMEN a. Kerja Fotodioda terhadap Pola Interferensi Sensor fotodioda memiliki tanggapan terhadap pola interferensi laser yang intensitasnya sangat kecil. Fotodioda ditempatkan pada bidang yang dipancarkan pola interferensi. Untuk mengukur pola terang, fotodioda ditempelkan pada bagian terang pola interferensi. Untuk mengukur pola gelap, cukup menggeserkan cermin hingga pola gelap bergeser ke fotodioda. Pengukuran dilakukan di ruang gelap laboratorium fisika lanjutan. Saat pola terang menganai fotodioda, nilai tegangan fotodioda serta ADC-nya langsung dicatat. Cara ini juga sama dilakukan pada pengambilan data untuk pola gelap. Data masingmasing pola diambil sebanyak lima kali.Tabel 1 dan 2 merupakan data tegangan output fotodioda yang diperoleh untuk tiap pola yang berbeda. Tabel 1. Lima data tegangan output fotodioda dalam menanggapi pola terang interferensi laser merah dengan rangankaian yang menggunakan transistor ADC Digit (Decimal) Tegangan Fotodioda (Volt) 604 2,908 589 2,834 594 2,858 601 2,893 602 2,898 Tegangan Fotodioda (Volt) 258 1,199 267 1,243 260 1,209 263 1,224 261 1,214 b. Kalibrasi LM35 dan Uji Coba Alat Pemanas LM35 memiliki nilai keluaran yang presisi dalam membaca temperatur. Kemampuan presisinya dapat dilihat pada pengukuran keluarannya dengan menggunakan multimeter dan ADC mikrokontroller. Kalibrasi LM35 ini bertujuan untuk mengetahui nilai keluaran LM35 terhadap perubahan suhu pemanas. Nilai temperatur LM35 yang digunakan akan dibandingkan dengan termokopel digital untuk mendeteksi temperatur logam yang dipanaskan. LM35 dan termokopel dipasang pada titik yang berdekatan dibagian logam tersebut. Saat heater dihubungkan dengan tegangan DC, temperatur logam meningkat secara perlahan. Peningkatan ini ditunjukkan dengan perubahan nilai temperatur pada layar digital termokopel dan perubahan nilai ADC LM35 ADC Digit LM35 (Decimal) Gbr 15. Flow chart pengukuran interferometer Michelson dengan pemuaian logam. ADC Digit (Decimal) 250 200 150 y = 2.0307x + 2.0702 100 50 0 0 50 100 150 Suhu (Celcius) Gbr 16. Grafik hubungan ADC LM35 terhadap suhu logam yang mengenainya. c. Pengukuran Pergeseran Kecil dengan Potensiometer Potensiometer yang digunakan untuk kalibrasi pemuaian harus dikalibrasi terlebih dahulu. Kalibrasi potensiometer ini dapat memanfaatkan mikrometer sekrup untuk mengamati perubahannya. Gambar 17 memperlihatkan cara untuk mengkalibrasi potensiometer tersebut. Ujung dari mikrometer sekrup akan mendorong balok. Balok ini akan dihubungkan dengan tali yang dililitkan dengan potensiometer. Ujung dari tali ini diberikan beban sekitar 100 gram agar tali dapat tegang. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 Tegangan Keluaran AD620 (V) Gbr 17. Sketsa kalibrasi potensiometer. 6 4 y = 0.4826x + 0.2671 2 0 0 5 10 15 Putaran ke- Gbr 18. Grafik hubungan tegangan potensiometer terhadap variasi putaran. Hasil pengukuran potensiometer tanpa AD620 masih belum pantas digunakan dalam pengukuran pergeseran yang sangat kecil, yaitu mengukur perubahan pergeseran hingga mencapai 100 µm. Potensiometer yang diukur tanpa AD620 masih menunjukkan output yang kurang sensitif terhadap pergeseran kecil. Oleh karena itu, potensiometer ini akan dihubungkan dengan AD620 (sebagai amplifier) untuk meningkatkan sensitifitas potensiometer dalam mengukur pergeseran yang kecil tersebut. Gambar 19 merupakan data hasil kalibrasi potensiometer yang diperkuat dengan AD620. d. Kemampuan Alat dalam Menggeserkan Cermin dengan Motor DC Motor DC dapat dimanfaatkan untuk memutarkan sekrup mikrometer dan akhrinya cermin dapat bergeser. Kecepatan dari motor DC harus diperhatikan, jika motor DC terlalu cepat dapat mengakibatkan posisi cermin jauh bergeser. Selain itu motor yang dapat bergerak terlalu cepat dapat menghasilkan getaran yang mengganggu pola interferensi. Untuk mengatasi hal ini, kecepatan motor akan dikendalikan dengan menggunakan PWM mikrokontroller. Selain itu, nilai PWM yang paling baik akan dicari tahu untuk memperoleh keunggulan dan kelamahan dari sistem ini. y = 1.451x + 0.329 0 1 2 3 4 Pergeseran (mm) Gbr 19. Grafik hubungan tegangan potensiometer yang dikuatkan dengan AD620 terhadap pergeseran mikrometer sekrup. Putaran sekrup mikrometer yang dihubungkan dengan motor dapat beresiko terjadinya slip. Oleh karena itu, permukaan motor dan mikrometer haruslah kasar. Untuk mendapatkan kondisi tersebut diberikan perekat untuk menghindari terjadinya slip. Untuk mengetahui error yang disebabkan oleh slip ini, motor diputar pada PWM tertentu sejauh jarak tertentu. Jarak pergeseran yang ditentukan adalah sebesar 5,64 mm, sementara rasio PWM-nya divariasikan. PWM yang dapat mengendalikan kecepatan motor akan menunjukkan hasil yang berbeda pada kemampuan alat dalam menggeserkan cermin, sehingga perlu adanya variasi PWM. Setelah mencapai nilai 2000 pulsa encoder atau 5,64, nilai pergeseran dicatat dari pembacaan mikrometer sekrup yang berubah. Sehingga data yang diperoleh akan mencatat nilai pergeseran dari mikrometer sekrup. 20.00 Error (%) Tegangan Potensiometer (Volt) Pengujian potensiometer ini masih terbilang kasar, karena untuk menentukan potensio telah berputar sejauh 360o tidak menggunakan busur. Pengukuran satu putaran ini hanya menggunakan jarum penunjuk yang diletakkan pada ujung potensiometer, sehingga putaran potensio dapat ketahuan jika telah mencapai satu putaran. Gambar 18 merupakan data hasil kalibrasi potensiometer yang digunakan. 6.000 5.000 4.000 3.000 2.000 1.000 0.000 15.00 10.00 5.00 0.00 80.00 85.00 90.00 95.00 100.00 105.00 Rasio PWM (%) Gbr 20. Grafik hubungan persentase error pergeseran terhadap rasio PWM saat cermin maju. Gambar 20 dan 21 merupakan dati hasil pengukuran persentase error. Data ini menunjukkan keadaan penyimpangan pergeseran dari sistem putaran motor saat memajukan cermin dan memundurkannya dengan rasio PWM atau kecepatan yang berbeda. Besarnya pergeseran ditentukan dari banyaknya pulsa encoder. Pulsa encoder yang diberikan adalah 2000 atau sebanding dengan 5,64 mm. Sehingga cermin akan bergeser sejauh 5,64 mm. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 Error (%) 0.60 0.50 0.40 0.30 0.20 0.10 0.00 45.00 50.00 55.00 60.00 65.00 70.00 Rasio PWM (%) Gbr 21. Grafik hubungan persentase error pergeseran terhadap rasio PWM saat cermin mundur. Keadaan cermin untuk maju menunjukkan error yang cukup besar saat diberikan PWM dibawah 90%. Motor sudah tidak mampu untuk mendorong cermin saat diberikan rasio PWM dibawah 80%. PWM yang digunakan memiliki skala frekuensi seperempat dari frekuensi kristal mikrokontrol yaitu 10Mhz. Rasio yang dimaksud adalah perbandingan antara waktu pulsa tertinggi dengan periode PWM. Mode PWM yang digunakan pada penelitian ini adalah fast PWM. Saat memundurkan cermin, pergeseran yang terjadi sangat halus dan cepat. Semakin kecil PWM-nya semakin sulit bagi motor untuk menggeser. Dari kejadian ini tercatat, motor dapat menggerakkan cermin pada rasio diatas 48%. Penyimpangan yang ditampilkan untuk pergeseran mundur ini sangat kecil, sehingga rasio PWM yang dimanfaatkan adalah pada rentang 4870%. Rasio PWM (%) e. Kemampuan Alat Dalam Mencacah Pola Terang Interferensi Arah pergerakkan cermin yang terbaik untuk mengambil data adalah mundur, jika sistem cermin ini dipasang pada percobaan interferometer michelson. Error akibat slip dari variasi PWM juga sangat kecil yaitu 0,1 hingga 0,5 % pada pergeseran sejauh 5,64 mm, sehingga pada percobaan interferometer michelsonnya dapat digunakan variasi PWM tersebut. Motor akan digeserkan sejauh jarak tertentu dengan variasi rasio PWM tertentu, kemudian mikrokontroller akan mencatat hasil cacahan perubahan pola terang gelap yang dideteksi fotodioda. Data yang diperoleh merupakan hasil cacahan yang hitung mikrokontroller dan ditampilkan pada LCD. Pengambilan data dilakukan lebih dari lima kali, tetapi data yang ditampilkan pada tabel 3 hingga 8 merupakan lima data terbaik dari data tersebut. Tabel 3. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,05 mm Cacahan pada Pengukuran keCacahan Rata-rata teori 1 2 3 4 5 Kecepatan (mm/s) Error (%) 48,92 3,35 136 135 133 131 121 131,20 160 18,00 54,79 4,04 113 121 111 101 95 108,20 160 32,38 60,67 9,47 76 85 103 99 84 89,40 160 44,13 66,54 12,57 86 90 89 77 76 83,60 160 47,75 Rasio PWM (%) Tabel 4. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,1 mm Cacahan pada Pengukuran keKecepatan Cacahan Rata-rata (mm/s) teori 1 2 3 4 5 Error (%) 48,92 3,35 277 256 248 235 231 249,40 320 22,06 54,79 4,04 102 150 161 201 124 147,60 320 53,88 60,67 9,47 123 119 119 114 105 116,00 320 63,75 66,54 12,57 115 102 101 99 95 102,40 320 68,00 Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 Rasio PWM (%) Tabel 5. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,15 mm Cacahan pada Pengukuran keKecepatan Cacahan Rata-rata (mm/s) teori 1 2 3 4 5 Error (%) 48,92 3,35 470 456 433 431 429 443,80 481 7,66 54,79 4,04 321 304 303 275 266 293,80 481 38,87 60,67 9,47 231 221 210 208 205 215,00 481 55,26 66,54 12,57 201 167 158 144 123 158,60 481 67,00 Rasio PWM (%) Tabel 6. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,2 mm Cacahan pada Pengukuran keKecepatan Cacahan Rata-rata (mm/s) teoritis 1 2 3 4 5 Error (%) 48,92 3,35 475 471 468 465 444 464,60 641 27,50 54,79 4,04 408 375 372 356 344 371,00 641 42,10 60,67 9,47 327 321 321 304 300 314,60 641 50,91 66,54 12,57 305 277 260 246 242 266,00 641 58,49 Rasio PWM (%) Tabel 7. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,25 mm Cacahan pada Pengukuran keKecepatan Cacahan Rata-rata (mm/s) teori 1 2 3 4 5 Error (%) 48,92 3,35 778 753 631 612 579 670,60 801 16,28 54,79 4,04 521 503 469 445 437 475,00 801 40,70 60,67 9,47 420 415 407 388 387 403,40 801 49,64 66,54 12,57 402 375 365 355 351 369,60 801 53,86 Rasio PWM (%) Tabel 8. Hasil cacahan fotodioda dari pergeseran cermin sejauh 0,3 mm Cacahan pada Pengukuran keKecepatan Cacahan Rata-rata (mm/s) teori 1 2 3 4 5 Error (%) 48,92 3,35 937 894 870 760 736 839,40 961 12,67 54,79 4,04 713 705 641 629 601 657,80 961 31,56 60,67 9,47 502 472 469 443 443 465,80 961 51,54 66,54 12,57 451 406 397 393 370 403,40 961 58,03 f. Pengukuran Pergerseran Cermin dengan Menggunakan Pemanasan Logam Pemuaian logam akibat kenaikan temperaturnya memang sangat kecil sekali dan sulit dilihat oleh mata. Pemuaian logam ini akan dimanfaatkan untuk menghasilkan pergeseran yang kecil tersebut. Sebelum menunjukkan hasil pergeserannya pada interferometer michelson, nilai pergeseran cermin tiap perubahan temperatur logam dihitung terlebih dahulu. Setelah itu, mencaritahu hubungan pergeseran sistem dengan temperatur. Sehingga, nilai pergeseran cermin pada interferometer michelson didteksi dari temperatur logamnya. g. Pengukuran Pemuaian Logam dengan Potensiometer Setelah memperoleh data potensiometer, selanjutnya menggunakan data potensiometer tersebut untuk mengukur pemuaian logam. Pemuaian logam yang digunakan tidak pasti sesuai dengan eksperimen, sehingga pemuaian yang sebenarnya masih perlu diketahui. Potensiometer akan mengalami perubahan tegangan saat pemuaian tertentu. Disaat mengalami perubahan tegangan, temperatur logam langsung dicatat. Setelah memperoleh nilai tegangan dari masing-masing temperatur, Nilai pergeseran cermin ditentukan dengan mengetahui perubahan tegangan tiap perubahan temperatur tertentu. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 Tabel 9. Hasil pergeseran per derajat celcius pada pemanasan kuningan dari 5 kali pengukuran Pengukuran ke - Pergeseran tiap 1 C (µm) Suhu yang dibutuhkan untuk 1 cacahan (C) 1 1,33 0,24 2 1,21 0,26 3 1,27 0,25 4 1,42 0,22 5 1,40 0,23 Rata-rata 1,33 0,24 Deviasi standar 0,087 Tabel 10. Hasil pergeseran per derajat celcius pada pemanasan kuningan dari 5 kali pengukuran Pengukuran ke - Pergeseran tiap 1 C (µm) Suhu yang dibutuhkan untuk 1 cacahan (C) 1 0,17 1,83 2 0,16 1,99 3 0,20 1,58 4 0,16 1,98 5 0,16 1,96 Rata-rata 0,17 1,85 Deviasi standar 0,017 Masing-masing perubahan ini dapat diperoleh dengan mencari selisih antara tegangan yang belum berubah dengan tegangan yang telah berubah. Setelah memperoleh informasi mengenai nilai tegangan potensiometer tiap temperatur tertentu, pengolahan data dilakukan untuk mengetahui pemuaian logam dalam 1 o C. Yang dibutuhkan dalam pengolahan data tersebut adalah perubahan tegangan potensiometer tiap perubahan temperatur. Pemuaian logam dapat diketahui dengan menggunakan fungsi transfer dari hasil kalibrasi potensiometer. ∆! = ∆!/(!"#$%&' !"#$%&"'$ !"#$%&'"($#$)) Hasil dari pengukuran ini dapat dilihat pada tabel 9 dan 10. h. Kemampuan Alat dalam Mendeteksi Pergeseran Tiap Cacahan Perubahan Pola terang pusat yang dideteteksi fotodioda disebabkan karena pemuaian logam yang dipanaskan. Mikrokontroller akan mencatat temperatur dan perubahan panjang logam saat fotodioda mendeteksi perubahan tersebut. Perubahan pola terang ke gelap kemudian ke terang kembali sebanding dengan satu cacahan. Tiap cacahan, mikrokontroller akan menyimpan data temperatur serta data pergeserannya. Setelah 10 kali cacahan, pemanasan akan berhenti dan nilai temperatur dan pergeseran akan ditampilkan pada LCD. Nilai tersebut akan dicatat sebagai data pengukuran ini. Pengukuran dilakukan dengan logam yang berbeda dan temperatur yang berbeda-beda. Tabel 11. Hasil cacahan fotodioda yang terukur dari pemanasan kuningan, pada rentang temperatur 54 sampai 57 celcius Cacahan ke- Temperatur (Celcius) Pergeseran (µm) 0 54,2 0 1 54,2 0 2 54,7 0,66 3 54,7 0 4 55,1 0,65 5 55,1 0 6 55,6 0,65 7 55,6 0 8 56,1 0,65 9 56,1 0 10 56,6 0,66 Total 3,28 Error (%) 3,63 Tabel 11 merupakan hasil pengukuran temperatur tiap pendeteksian cacahan fotodioda dengan memanfaatkan pemuaian kuningan. Hasil pengukuran dengan kuningan menunjukkan cara pengukuran yang kasar. Resolusi pergeseran yang dapat terdeteksi dari logam kuningan ini adalah 0,664 µm. Nilai ini sebesar Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013 dua kali lipat dari nilai setengah panjang gelombang. Error yang diperoleh memang tidak terlalu besar. Error ini merupakan error secara keseluruhan. Jika error diperlihatkan dari tiap cacahan, maka akan tampak jelas resolusi pengukuran sangat kasar. Tabel 12 merupakan hasil pengukuran temperatur tiap pendeteksian cacahan fotodioda dengan memanfaatkan pemuaian kuningan. Hasil pengukuran dengan besi menunjukkan resolusi yang lebih baik dibandingkan dengan kuningan. Resolusi pergeseran yang dapat terdeteksi adalah 0,086 µm. Resolusi yang kecil ini dapat memeprkecil resolusi nilai error pengukuran. Hal ini ditunjukkan dari hasil pengukuran dengan besi mendapatkan error yang rendah. Tabel 12. Hasil cacahan fotodioda yang terukur dari pemanasan besi, pada rentang temperatur 40 sampai 60 celcius Cacahan ke- Temperatur (Celcius) Pergeseran (µm) 0 41,8 0 1 43,8 0,34 2 45,8 0,34 3 48,2 0,42 4 50,2 0,34 5 52,2 0,34 6 54,2 0,34 7 56,1 0,34 8 58,1 0,34 9 59,1 0,17 10 60,1 0,17 Total 3,12 Error (%) 1,50 IV. KESIMPULAN Sistem pengukuran pergeseran cermin pada interferometer michelson ini menampilkan dua model dengan performa yang berbeda-beda. Performa dari masing-masing model tersebut dapat disimpulkan sebagai berikut. 1. Model Motor DC kecepatan motor yang rendah (3,3 mm/s) dapat mengakibatkan penyimpangan 0,6%. Kemungkinan peyimpangan ini disebabkan karena terjadinya slip pada belt dan roda motor. Pada percobaan interferometer michelson, kecepatan motor DC dapat mempengaruhi pembacaan fotodioda, hal ini dapat disebabkan karena sistem hanya mampu menanggapi cacahan kurang dari 10591 dalam satu detik, sehingga error yang dihasilkan untuk motor yang berkecepatan tinggi dapat mencapai 66%. Error pengukuran cacahan pola terang gelap pusat interferensi masih berada pada rentang 7 - 22%, pada rasio PWM 48%. 2. Model Pemanasan Logam Pada pemanasan logam dalam rentang perubahan satu derajat celcius, diperoleh nilai pergeseran cermin pada alat akibat pemuaian logam sekitar 0,171µm. Nilai ini merupakan rata-rata dari pergeseran sistem dan masih belum dipastikan sebagai nilai pemuaian logam secara keseluruhan. Dalam satu cacahan, error yang dihasilkan dapat mencapai 9%, tetapi dalam 10 kali cacahan error tersebut dapat mencapai 1,5%. Hasil ini menunjukkan resolusi satu cacahan menghasilkan error yang lebih besar dibandingkan dengan resolusi 10 cacahan. Resolusi ADC mikrokontroller dalam menampilkan temperatur LM35 adalah 0,5oC, sehingga ketelitian pergeseran yang dapat ditampilkan LCD adalah 0,085µm. Pada pengoperasian alat di rentang temperatur logam 40 oC hingga 60oC diperoleh error 1,5% hingga 9%, sementara rentang operasi 50 oC hingga 68 oC diperoleh error 9% hingga 14%. Pengoperasian 40 oC hingga 60oC menghasilkan error yang lebih kecil dibandingkan 50 oC hingga 68 oC. DAFTAR ACUAN [1] Pain, H. J. (2005). The Physics of Vibrations and Waves (6th ed.). United Kingdom: John Wiley & Sons. [2] Hecht, Eugen. (2002). Optics (4th ed.). San Fransisco: Addison Wesley. [3] Jenkis, Francis and White, Harvey. (2001). Fundamentals of Optics ( 4th ed.). New York: Mc-Graw Hill. [4] Tipler, Paul A. (1998). Fisika (Jilid 1, Lea Prasetio, Rahmad W. Adi, Penerjemah). Jakarta: Erlangga. [5] Wagner, E., Dandliker, R. and Spenner, K. (1989). Optical Sensors: Sensors a Comprehensive survey (Volume 6). Weinhem: VCH. [6] Fraden, Jacob. (2004). Handbook of Modern Sensor (3rd ed.). New York : Spinger-Verlag. [7] Derenzo, Stephen E. (2003). Practical Interfacing in the Laboratory Using a PC for Instrumentation, Data Analysis, and Control. New York: Cambridge University Press. [8] Texas Instrument. Precision Centrigade Temperatur Sensor: LM35 Datasheet. [9] Gadre, Dhananjay V. (2001). Programming and Costumizing the AVR Microcontroller. United State: Mc-Graw Hill. Sistem pengukur pergeseran..., M Yusuf fakhri, FMIPA UI, 2013