BAB 3 PEMBAHASAN DAN PENGOLAHAN DATA
advertisement

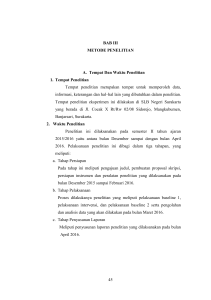
BAB 3 PEMBAHASAN DAN PENGOLAHAN DATA 3.1 Data Pengamatan GPS Kontinyu yang Digunakan Dalam mencapai target penelitian pada tugas akhir ini, yaitu pengujian terhadap perangkat lunak RTKLIB yang nantinya akan dikembangkan menjadi sistem realtime GPS yang terintegrasi, dibutuhkan data pengamatan GPS kontinyu yang dapat mendukung suksesnya pengujian ini. Beberapa data pengamatan GPS kontinyu yang digunakan mencakup titik GPS kontinyu pada zona pantau deformasi lempeng tektonik pada saat terjadi gempa dan sebagian lainnya pada saat tidak terjadi gempa (titik pantau dalam kondisi stabil/secara historis tidak terjadi gempa). Dengan menemukan informasi pergeseran setiap titik pantau maka dapat dilakukan analisis terhadap fenomena fisis yang terjadi yang mana diasumsikan bahwa titik pantau tersebut telah dapat merepresentasikan keadaan yang sebenarnya. Data yang digunakan dalam tugas akhir ini meliputi beberapa data pengamatan GPS kontinyu SuGAr (Sumatran GPS Array) pada saat tidak terjadi gempa dan saat terjadi Gempa Mentawai tahun 2010, beberapa data pengamatan GPS kontinyu pada jaring IGS (International GNSS Service) di jepang pada saat tidak terjadi gempa dan saat terjadi Gempa Honshu tahun 2011, dan beberapa data pengamatan GPS kontinyu di Jawa Barat saat tidak ada gempa. 3.1.1 Data Pengamatan GPS Kontinyu SuGAr SuGAr dibuat dan dioperasikan oleh anggota Penelitian Tektonik Caltech dan Lembaga Ilmu Penelitian Indonesia (LIPI). Data pengamatan GPS ini memiliki interval waktu pengamatan 15 detik. Data pengamatan GPS ini digunakan untuk mengetahui kestabilan hasil pengolahan data GPS serta untuk mendeteksi informasi pergeseran yang diakibatkan oleh Gempa Mentawai 2010. Berdasarkan informasi dari USGS (U.S. Geological Survey) [volcanoes.usgs.gov], Gempa Mentawai terjadi pada hari senin 25 oktober 2010 pada jam 14:42:22 UTC atau 09:42:22 PM pada waktu lokal, dengan magnitude 7.7, pada kedalaman 20.6 km, serta episenter 25 berlokasi di 240 km sebelah barat kota Bengkulu. Pada day of year GPS, Gempa Mentawai terjadi pada day of year 298. Pengujian kestabilan hasil pengolahan baseline GPS menggunakan data pengamatan GPS kontinyu pada saat tidak terjadi gempa. Dalam hal ini digunakan data pengamatan GPS pada day of year 293. Secara lebih terperinci, data pengamatan SuGAr yang digunakan dalam penelitian ini sebagai berikut : Tabel 3.1 Data Pengamatan GPS SuGAr No Titik GPS Ketersediaan Data (Day of year) Kontinyu 293 298 1 KTET v v 2 MSAI v v 3 PARY v v 4 PSKI v v Gambar 3.1 Persebaran titik-titik pengamatan GPS SuGAr dan lokasi episenter Gempa Mentawai 2010 [Google Earth, Tahun Akses 2012] 26 Pendeteksian offset gempa pada titik-titik pantau GPS saat terjadi Gempa Mentawai 2010 dilakukan dengan pengolahan data GPS baseline per baseline. Dari beberapa titik pengamatan GPS kontinyu di atas kemudian dipilih satu titik sebagai stasiun referensi. Titik yang dipilih sebagai stasiun referensi pada kasus ini adalah titik PSKI (lihat gambar 3.1). Dengan mengacu kepada metode penentuan posisi secara diferensial, maka koordinat titik-titik pantau yang diperoleh relatif terhadap titik referensi tersebut. Apabila titik pantau memberikan informasi pergeseran, maka pergeseran tersebut adalah pergeseran posisinya relatif terhadap titik referensi. Titik PSKI dipilih sebagai titik referensi dengan alasan sebagai berikut : 1. Berprinsip kepada penentuan posisi dengan GPS kinematik, maka baseline yang memenuhi syarat pengolahan data yang optimal adalah baseline yang tidak terlalu panjang, maka dengan dijadikannya titik PSKI sebagai titik referensi, baseline-baseline pengamatan GPS yang terbentuk akan memiliki jarak yang relatif tidak terlalu panjang. Semakin dekat titik referensi terhadap titik-titik pantau maka akan diperoleh hasil dengan ketelitian yang lebih baik, akan tetapi jarak yang dekat ini memberikan dampak lain yaitu kemungkinan titik referensi bergerak pada saat terjadi gempa juga besar. 2. Titik PSKI cenderung lebih stabil dan kemungkinan titik tersebut mengalami deformasi pada saat terjadinya Gempa Mentawai sangat kecil (hal ini berdasarkan jarak yang cukup jauh dengan pusat gempa, yaitu lebih dari 300 km). 3. Dengan dugaan awal bahwa titik pantau KTET akan mengalami deformasi yang lebih signifikan dibandingkan dengan titik pantau lainnya, maka titik PSKI lebih tepat dijadikan sebagai titik referensi karena menghasilkan panjang baseline yang cukup baik. Informasi deformasi pada titik KTET diketahui melalui penelitian yang pernah dilakukan oleh peneliti sebelumnya dengan metode penentuan posisi secara statik. Vektor pergeseran titik pantau KTET tampak seperti gambar 3.2. 27 Gambar 3.2 Vektor pergeseran titik pantau KTET [Caltech, 2010] 3.1.2 Data Pengamatan GPS Kontinyu Jaring IGS Jepang Data pengamatan GPS ini diproses dan disimpan di SOPAC (Scripts Orbit and Permanent Array Center) yang dikelola oleh IGPP (Institut of Geophysics and Planetary) Universitas California dengan tujuan untuk membantu pengukuran geodesi dan geofisika berketelitian tinggi sebagai bagian untuk mempelajari bahaya gempa bumi, pergerakan lempeng tektonik, deformasi lempeng dan proses-proses meteorologi. Titik-titik pengamatan GPS pada jaring IGS ini digunakan untuk mengetahui kestabilan hasil pengolahan data GPS serta untuk mendeteksi informasi pergeseran yang diakibatkan oleh Gempa Honshu 2011. Data pengamatan GPS ini memiliki interval waktu pengamatan 30 detik. Berdasarkan informasi dari USGS (U.S. Geological Survey) [volcanoes.usgs.gov], Gempa Honshu terjadi pada hari senin 11 maret 2011 pada jam 05:46:24 UTC atau 02:46:24 PM pada waktu lokal, dengan magnitude 9.0, pada kedalaman 30 km, serta episenter berlokasi di 129 km sebelah timur kota Sendai. Pada day of year GPS, Gempa Honshu terjadi pada day of year 070. 28 Pada pengolahan baseline GPS yang digunakan untuk mengetahui kestabilan hasil pengolahan data, digunakan data pengamatan GPS pada saat tidak terjadi gempa yaitu data pengamatan GPS Jaring IGS Jepang pada day of year 068 (tabel 3.2). Tabel 3.2 Data Pengamatan GPS Kontinyu Pada Jaring IGS No Titik GPS Ketersediaan Data (Day of year) Kontinyu 068 070 1 USUD v v 2 KGNI v v 3 MTKA v v 4 TSKB v v 5 MIZU v v 6 TSK2 v - Pendeteksian offset gempa pada titik-titik jaring IGS saat terjadi Gempa Honshu 2011 dilakukan dengan pengolahan data GPS baseline per baseline. Dari titik-titik pengamatan GPS kontinyu pada jaring IGS tersebut dipilih dua dari enam titik pengamatan GPS sebagai titik referensi. Kedua titik tersebut adalah titik USUD dan MTKA (gambar 3.3). Pada dasarnya di sini akan dilakukan pengujian terhadap perangkat lunak RTKLIB dalam mendeteksi informasi pergeseran dari titik pantau pada baseline yang panjang maupun pendek saat terjadi gempa. Ketika titik USUD dijadikan sebagai referensi, maka yang menjadi titik-titik pantau adalah titik KGNI, MTKA, TSKB, dan MIZU (DOY : 070). Sedangkan ketika titik MTKA dijadikan sebagai titik referensi, maka titik-titik yang dijadikan titik pantau adalah titik KGNI, TSKB, dan MIZU (DOY : 070). Titik referensi tersebut dipilih berdasarkan asumsi kestabilan titik referensi dan panjang baseline yang dihasilkan. Berdasarkan dugaan awal, titik pantau yang akan mengalami deformasi secara signifikan adalah titik pantau MIZU, hal ini dikarenakan titik pantau tersebut memiliki jarak yang cukup dekat dengan pusat gempa (walaupun memiliki jarak yang cukup jauh dari stasiun referensi). 29 Berikut gambaran dari sebaran titik-titik pengamatan GPS pada jaring IGS Jepang : Gambar 3.3 Persebaran titik-titik pengamatan GPS pada jaring IGS Jepang dan lokasi episenter Gempa Honshu 2011 [Google Earth, 2012] 3.1.3 Data Pengamatan GPS Kontinyu di Jawa Barat Dengan menggunakan data pengamatan GPS kontinyu di Jawa Barat dapat dilakukan pengujian kestabilan hasil pengolahan data dengan perangkat lunak RTKLIB. Titiktitik pengamatan GPS kontinyu ini relatif diam (tidak mengalami gempa atau deformasi yang signifikan pada saat itu). Titik-titik pengamatan GPS kontinyu ini pada dasarnya dibangun untuk keperluan riset dalam melakukan pemantauan deformasi Sesar Lembang. Data pengamatan GPS memiliki interval pengamatan 30 detik. Titik-titik pengamatan GPS tersebut meliputi titik ITB, UPI, TNKP, serta BAKO (salah satu titik pengamatan GPS pada jaring IGS). Jarak yang dibentuk titiktitik pengamatan GPS seperti ITB, UPI, dan TNKP merupakan jarak yang relatif pendek yang dalam konsep GPS kinematik panjang baseline yang dibentuk oleh ketiga titik tersebut merupakan panjang baseline ideal untuk mencapai hasil dengan ketelitian optimal (karena diasumsikan kesalahan dan bias dapat tereduksi dengan baik). 30 Dilakukan pengolahan baseline antara titik-titik pengamatan GPS tersebut (berdasarkan ketersediaan data pada tabel 3.3) di antaranya baseline ITB-UPI, baseline UPI-TNKP, dan baseline BAKO-ITB. Pemilihan titik referensi ini berdasarkan kepada asumsi kestabilan titik referensi dan jarak dari objek pemantauan yang diasumsikan akan mengalami deformasi. Berikut gambaran sebaran titik-titik pengamatan GPS kontinyu yang ada di Jawa Barat : Gambar 3.4 Persebaran titik-titik pengamatan GPS kontinyu di Jawa Barat [Google Earth, 2012] Tabel 3.3 Data Pengamatan GPS Kontinyu di Jawa Barat No Titik GPS Ketersediaan Data (Day of year) Kontinyu 361 010 1 BAKO v - 2 ITB v - 3 UPI v v 4 TNKP - v 31 3.2 RTKLIB RTKLIB merupakan salah satu perangkat lunak yang digunakan dalam pengolahan data GPS. Di dalamnya terdapat berbagai macam metode penentuan posisi dengan GPS yang dapat dimanfaatkan sesuai dengan keperluan pengamatan GPS itu sendiri. Salah satu keunggulan yang dimiliki perangkat lunak ini adalah bahwa perangkat lunak ini dapat digunakan dan di-download secara bebas oleh siapapun tanpa syarat apapun. Tentunya dengan realita bahwa kebanyakan perangkat lunak pengolah data GPS adalah perangkat lunak yang cukup mahal, maka perangkat lunak ini cukup menjanjikan solusi yang lebih baik dari segi efisiensi biaya penelitian. Tidak hanya dapat melakukan pengolahan data pengamatan GPS secara post-processing, perangkat lunak RTKLIB ini juga dapat melakukan pengolahan data pengamatan GPS secara realtime yang dikombinasikan dengan sistem komunikasi data yang terpadu. Tujuan utama dari desain yang dimiliki oleh RTKLIB ini adalah simplicity, portability, dan performa yang bagus. Untuk mencapai tujuan ini, dipilih ANSI C untuk menuliskan kode-kode pemrograman pada perangkat lunak ini. Di dalam RTKLIB, terdapat berbagai program yang disediakan sesuai dengan algorithma positioning yang diperlukan. Beberapa program tersebut di antaranya [RTKLIB Manual, 2011] : Fungsi matrik dan vektor Fungsi Waktu Transformasi koordinat dan model geoid Pemrosesan navigasi Model troposfer, ionosfer, dan antena Single Point Positioning Penentuan posisi relatif berdasarkan data fase dan kode On-the-fly integer ambiguity resolution Input data raw binary dari titik pengamatan GPS base station dan rover Positioning solution RINEX observation data/ navigation message input/output SP3 Precise ephemeris input Stream data communication 32 Pada perangkat lunak RTKLIB juga disediakan APIs (Aplication Program Interfaces) yang dapat dengan mudah digunakan untuk real-time positioning, postprocessing analysis, dan keperluan positioning lainnya. APIs pada perangkat lunak ini terdiri dari [RTKLIB Manual, 2011] : Real-time positioning (RTKNAVI) Post-mission baseline analysis (RTPPOST, RNX2RTKP) Communication utility (STRSVR) Plot graph of solutions dan observation data (RTKPLOT) RINEX converter dari raw data log receiver (RTKCONV, CONVBIN) Pada tugas akhir ini, perangkat lunak ini secara khusus diperuntukkan untuk pengolahan data GPS kontinyu dengan metode penentuan posisinya secara kinematik. Data pengamatan GPS kontinyu diolah secara post-processing dengan penambahan informasi pendukung lainnya sebagai input data dalam optimalisasi penggunaan perangkat lunak RTKLIB. Output solution dari RTKLIB ini adalah koordinat titik pantau setiap epok pengamatan GPS dan plot grafik vektor pergeseran titik pantau. 3.3 Penentuan Ambiguitas Fase Pada RTKLIB Dasar utama dari pengolahan data dengan RTKLIB pada tugas akhir ini adalah penentuan posisinya secara kinematik. Maksud dari kinematik di sini adalah titik atau objek yang akan ditentukan posisinya dalam keadaan bergerak dan koordinat hasil dari titik yang diamati posisinya tersebut harus bisa ditentukan dalam rentang waktu yang singkat (rentang interval waktu pengamatan) dengan data yang terbatas. Tentunya terdapat beberapa perbedaan dengan algoritma pengolahan data yang digunakan pada GPS statik. Salah satunya adalah dalam hal penentuan ambiguitas fasenya. 33 Pada penentuan posisi secara kinematik dengan RTKLIB, data pengamatan GPS yang digunakan adalah data fase pengamatan double-difference pada L1 dan L2. Teknik pengolahan datanya menggunakan teknik diferensial / pengurangan data. Dengan teknik ini kesalahan jam receiver dan satelit dapat tereliminasi dengan sempurna. Kesalahan dan bias seperti kesalahan orbit, bias troposfer, dan bias ionosfer juga dapat tereduksi (pada baseline yang relatif pendek kesalahan dan bias dapat tereduksi dengan baik sehingga menghasilkan residu yang kecil dan dapat diabaikan nilainya). Secara matematis data double-difference (fase) yang melibatkan dua pengamat (i dan j) serta dua satelit (k dan l) untuk suatu frekuensi pada suatu epok tertentu dapat dituliskan sebagai berikut [Abidin, 2006] : (3.1) Pada baseline yang panjang, digunakan model koreksi ionosfer dengan mengestimasi STEC (Slant Total Electron) dan model koreksi troposfer dengan mengestimasi ZTD (Zenit Total Delay) dan gradien. Pengestimasian STEC (Slant Total Electron Content) dilakukan dengan mengkombinasikan antara data fase pada dua frekuensi dan code-delay pengamatan GPS sepanjang perjalanan sinyal GPS dari satelit ke receiver. ZTD merupakan model variasi dari refraksi indeks troposfer yang bergantung kepada temperatur, tekanan, dan kandungan air yang ada pada troposfer. Gradient di sini maksudnya yaitu parameter gradien horizontal, Jika ZTD adalah pengestimasian koreksi troposfer secara vertikal, maka gradien horizontal adalah pengestimasian koreksi troposfer secara horizontal. Hal ini dikarenakan kondisi troposfer secara vertikal dan horizontal untuk setiap medium yang dilalui sinyal GPS memiliki kondisi meteorologis yang berbeda-beda. Selanjutnya estimasi posisi dan solusi ambiguitas fase dalam bentuk bilangan real dapat ditentukan dengan persamaan double-difference tersebut. Penentuan posisi pada RTKLIB dapat dituliskan persamaannya sebagai berikut [Abidin, 2006] : (3.2) 34 Pada dasarnya parameter posisi rover dapat dengan tepat ditentukan jika kebulatan nilai ambiguitas fase dapat ditentukan secara benar. Untuk mendapatkan estimasi posisi awal titik referensi yang cukup baik, dalam menentukan posisi koordinat yang pertama (koordinat rover) dan ambiguitas fase dalam bilangan real dengan teknik double-difference digunakan koordinat pendekatan titik referensi sebagai input parameter koordinat pendekatan. Koordinat pendekatan ini dapat diperoleh dari koodinat pendekatan pada RINEX header, dengan metode single point positioning, ataupun data ITRF network. Kemudian koordinat pendekatan tersebut digunakan untuk mengestimasi nilai koordinat rover yang pertama. Diturunkan dari model matematis yang sama, nilai ambiguitas fase dalam bentuk bilangan real dapat ditentukan nilainya. Pada penentuan ambiguitas fasenya diperlukan data fase yang teliti. Resolusi dari ambiguitas fase sangat bergantung kepada jumlah satelit yang teramati secara simultan. Selain itu, hal lain yang sangat berpengaruh terhadap kesuksesan penentuan ambiguitas fase yang benar adalah geometri satelit dan multipath. Data code yang teramati dan tersimpan dalam observation file digunakan untuk menganalisis adanya cycle slip. Secara umum, jika tidak ada cycle slip atau satelit yang teramati di setiap epok selalu sama akan menghasilkan nilai ambiguitas fase yang selalu sama di setiap epoknya. Selanjutnya dicari interval waktu pengamatan yang terbaik yang dapat menghasilkan resolusi ambiguitas yang baik. Kriteria dari interval waktu yang terbaik ditentukan berdasarkan jumlah satelit yang teramati, panjang interval waktu, dan nilai PDOP. Pada interval waktu yang terpilih, nilai pendekatan awal ambiguitas fase menggunakan nilai ambiguitas fase dalam bentuk bilangan real yang sebelumnya telah dihitung. Solusi ambiguitas yang terbaik dibandingkan dengan solusi ambiguitas kedua terbaik. Dalam hal ini yang dibandingkan adalah variansinya. Ketika kebulatan nilai dari ambiguitas fase berhasil dipecahkan (dihitung dari data panjang gelombang), maka koordinat rover yang diperoleh akan memiliki ketelitian dalam orde centimeter [Abidin, 2006]. 35 3.4 Informasi Pendukung Pengolahan Data Selain data observasi / pengamatan GPS titik referensi dan titik-titik pantau, pengolahan data dengan menggunakan perangkat lunak RKTLIB memerlukan beberapa data pendukung pengolahan data GPS, di antaranya : 1. GPS Navigation Data Data ini berisikan informasi tentang koefisien koreksi jam satelit, parameter orbit, almanak satelit, UTC, parameter koreksi ionosfer, serta informasi spesial lainnya seperti status konstelasi dan kesehatan satelit. Data ini dapat diunduh di http://sopac.ucsd.edu/cgi-bin/dbDataByDate.cgi, dengan format “IGSdddt.yyn.Z.” “ddd” menunjukkan day of year GPS yang informasinya dapat dilihat di GPS kalendar. Sedangkan “t” menunjukkan time of day dari GPS. “yy” menunjukkan tahun dari data GPS. Data “IGSdddt.yyn.Z” selanjutnya diekstrak menjadi “IGSdddt.yyn” yang kemudian di-input ke dalam RTKLIB. 2. Precise Orbit Data informasi orbit dan jam yang digunakan dalam penelitian ini yaitu data GPS Precise ephemeris. Data ini dapat diunduh dari http://sopac.ucsd.edu/cgibin/dbDataByDate.cgi, dengan format “IGSwwwwd.sp3.Z.” “wwww” menunjukkan GPS week atau minggu GPS yang informasinya dapat dilihat di GPS kalendar. Sedangkan “d” menunjukkan day of week data GPS. Data “IGSwwwwd.sp3.Z” selanjutnya diekstrak menjadi “IGSwwwwd.sp3” yang kemudian di-input ke dalam RTKLIB. 36 3.5 Pengolahan Data GPS Dengan RTKLIB Gambar 3.5 Strategi pengolahan pada RTKLIB Dalam melakukan pemrosesan data pengamatan GPS kontinyu untuk keperluan studi deformasi, output yang diinginkan dari suatu perangkat lunak pengolah data GPS yang digunakan adalah koordinat titik-titik pantau dengan ketelitian yang sesuai yang diharapkan. Secara umum, data pengamatan GPS biasanya akan dipengaruhi oleh kesalahan dan bias yang terkait dengan satelit (kesalahan orbit dan kesalahan jam satelit), receiver (kesalahan jam receiver, kesalahan pusat antena dan noise) dan data pengamatan (ambiguitas fase serta kesalahan dan bias lingkungan sekitar pengamatan GPS). Pada RTKLIB, terdapat beberapa opsi yang dapat dilakukan dalam mengolah data pengamatan GPS secara kinematik agar didapatkan hasil yang kesalahan dan biasnya dapat tereduksi dengan baik. Untuk lebih jelasnya, berikut tahapan-tahapan dalam melakukan pengolahan data GPS secara kinematik dengan RTKLIB : 37 1. Tahap Input Data Seperti yang dijelaskan pada sub bab sebelumnya (sub bab 3.4), data yang di-input ke dalam RTKLIB meliputi data observasi GPS, Data navigasi GPS, dan precise orbit. Peng-input-an data obsevasinya adalah baseline per baseline. Di mana data tersebut didefinisikan sebagai rover dan base station (dapat di lihat pada gambar 3.5). Data observasi ini dapat memiliki format *.obs, *.*O, *.*D. Setelah di-input data observasinya selanjutnya dilakukan peng-input-an data informasi pendukung lainnya seperti data navigasi GPS dan precise orbit. Data navigasi GPS ini dapat memiliki format *.*nav, *.*N, *.*P, *.*G, *.*H, *.*Q, sedangkan precise orbit memiliki format *.sp3. Gambar 3.6 Tampilan muka RTKPOST (Salah satu AP file pada RTKLIB) Tampak pada gambar di atas salah satu contoh tampilan RTKLIB pada saat proses input data. Setelah semua data utama dan pendukung di-input, selanjutnya diatur output directory-nya sesuai directory yang dikehendaki. File output dari proses pengolahan RTKLIB berformat *.pos. 38 Gambar 3.7 Time Information pada RTKLIB Pada time information dapat dlihat hasil konversi dari GPST ke UTC, informasi GPS week, GPS time, day of year, day of week, time of day, dan leap seconds. 2. Tahap Pengaturan Strategi Pengolahan RTKLIB Tahap ini merupakan tahap yang paling menentukan dalam kesuksesan pengolahan data dengan menggunakan RTKLIB. Pada tahap ini pengaturan yang diterapkan harus tepat dan benar. Pengaturan yang diterapkan pada RTKLIB meliputi : Gambar 3.8 Setting 1 pada RTKLIB 39 Dapat dilihat pada gambar 3.8 dipilih positoning mode kinematic. Maksud dari kinematic di sini adalah penentuan posisi dengan GPS (data fase) secara kinematik. Hal ini dipilih karena sesuai pada maksud dan tujuan tugas akhir yaitu analisis GPS kinematik. base station di sini merupakan suatu titik yang dianggap diam sedangkan rover dianggap suatu titik yang mengalami perubahan posisi dari waktu ke waktu (meskipun perubahan itu sangat kecil dari epok yang satu ke epok selanjutnya). Pada data pengamatan GPS kontinyu di lapangan, terlihat bahwa GPS dipasang secara statik pada suatu titik tanpa ada upaya melakukan pergerakan agar mengalami perubahan posisi. Oleh karena itu, terdeteksinya pergeseran pada beberapa titik secara dominan disebabkan oleh adanya deformasi lempeng / tanah tempat berdiri alat GPS dan noise. Frekuensi yang dipilih adalah L1+L2 karena data fase pengamatan GPS yang digunakan adalah data fase pada kedua frekuensi tersebut. Solution type yang dipilih adalah forward (forward filter solution) yaitu proses filtering dilakukan beruntun dari epok pertama kemudian ke epok kedua dan seterusnya yang berprinsip kepada metode recursive least square. Filtering ini digunakan dalam proses pengestimasian nilai vektor pergeseran setiap epok. Nilai estimasi parameter posisi pada epok berikutnya diperoleh sebelum data pengamatan pada epok berikutnya tersebut diperoleh, selanjutnya ketika data pengamatan pada epok berikutnya diperoleh maka nilai estimasi posisi di-update. Hal ini dimaksudkan untuk prediksi nilai parameter posisi pada epok mendatang. Kemudian elevation mask angle-nya diatur menjadi 10˚, hal ini memungkinkan perhitungan solusi koordinat rover melibatkan relatif lebih banyak satelit pada setiap epoknya. Kecepatan dan percepatan dari rover di sini tidak diestimasi (hal ini untuk mengestimasi posisi rover) sehingga dapat dilihat pada gambar 3.7, rec dynamics tidak digunakan. Pada pengaturan ini diterapkan juga koreksi pasang bumi (earth tides correction), hal ini berfungsi untuk menghilangkan distorsi yang terkandung pada data pengamatan GPS akibat pengaruh pasang bumi. 40 Dalam hal pengkoreksian ionosfernya digunakan pengestimasian STEC (Slant Total Electron Content) yang melakukan pemodelan koreksi ionosfer dengan mengkombinasikan antara data fase pada dua frekuensi dan code-delay pengamatan GPS sepanjang perjalanan sinyal GPS dari satelit ke receiver. Untuk pengkoreksian troposfernya digunakan estimate ZTD+Grad (Zenith Total Delay + Gradient) pada rover dan base station. ZTD merupakan model variasi dari refraksi indeks troposfer yang bergantung kepada temperatur, tekanan, dan kandungan air yang ada pada troposfer. Gradient di sini maksudnya yaitu parameter gradien horizontal, Jika ZTD adalah pengestimasian koreksi troposfer secara vertikal, maka gradien horizontal adalah pengestimasian koreksi troposfer secara horizontal. Jadi, lapisan troposer memiliki variasi juga secara horizontal antara tempat yang satu dengan tempat yang lain (terkait temperatur, tekanan, dan kandungan air) [Pacione, 2002]. Selanjutnya satellite ephemeris yang digunakan pada pengolahan data GPS dengan RTKLIB ini adalah precise ephemeris. Hal ini memungkinkan pengestimasian posisi satelit dapat dihitung dengan lebih teliti (ketelitian hingga orde cm). Data pengamatan GNSS (Global Navigation Satellite System) yang digunakan untuk pengolahan data adalah dibatasi pada pengamatan satelit GPS saja. Gambar 3.9 Setting 2 pada RTKLIB 41 Dapat dilihat pada gambar 3.9, strategi dalam penentuan resolusi integer ambiguity yang digunakan adalah fix and hold. Dalam hal ini static integer ambiguities-nya diestimasi dan dipecahkan, jika lolos validasi maka nilai ambiguitas menjadi nilai ambiguitas fase yang fix. Batas validasi integer ambiguity yang digunakan untuk ratio-test (rasio antara kuadrat residu pada vektor best-integer terhadap vektor second-best integer) adalah 5.0. Nilai minimum lock count dan elevation angle (deg) dari fix integer ambiguity-nya dipilih 0. Jika nilai minimum lock count dan elevation angle-nya dipilih kurang dari 0, maka nilai ambiguitas yang dimunculkan hanya fix integer ambiguity. Nilai minimum fix count dan elevation angle berkaitan dengan pemilihan resolusi integer ambiguity “fix and hold”. Nilai minimum fix count-nya dipilih 10, sedangkan elevation angle-nya adalah 0. Outage to reset ambiguity dipilih 5 dan slip threshold dipilih 5 cm. Jika dalam perhitungan terdapat data yang lebih besar dari nilai outage yang dipilih, maka ambiguitas yang diestimasi di-reset ke nilai awal (initial). Slip threshold di sini maksudnya adalah cycle-slip threshold. Nilai 5 cm merupakan batas terluar untuk me-reset cycle-slip setiap epoknya. Nilai maximum age of differential antara rover dan base station dipilih 30 s. Batas nilai penolakan GDOP dan innovation (pre-fit residual) di pilih 30. Jika dipilih lebih besar dari nilai tersebut maka data pengamatan yang digunakan pada proses estimasi dianggap sebagai outlier. Banyaknya iterasi dalam updating data pengamatan dalam proses estimasi dipilih 1 kali. Iterasi ini efektif dalam mengatasi kasus persamaan pengamatan yang non linier. 42 Gambar 3.10 Output pada RTKLIB Dipilih output solution pada pengolahan dengan RTKLIB yaitu E/N/U-Baseline (lihat gambar 3.10). E adalah Easting (vektor yang menyatakan besaran dan arah barat-timur), N adalah Northing (vektor yang menyatakan besaran dan arah utaraselatan), dan U adalah Up (vektor yang menyatakan besaran dan arah atasbawah/vertikal). Sistem koordinat ini dikenal dengan nama sistem koordinat toposentrik. Dalam hal ini koordinat toposentrik rover ditentukan relatif terhadap posisi base station (titik nol koordinat dari sistem koordinat toposentrik ini adalah titik base station). Sebenarnya koordinat toposentrik ini adalah hasil transformasi dari koordinat pada sistem koordinat geosentrik. Pada output-nya ditampilkan juga header dan processing option yang diterapkannya. 43 Gambar 3.11 Statistics pada RTKLIB Dapat dilihat pada gambar di atas, rasio standar deviasi antara kesalahan pseudorange dengan kesalahan data fase adalah 100 untuk masing-masing frekuensi (L1 dan L2). Standar deviasi dari kesalahan data fase dipilih 0.006. Standar deviasi dari kesalahan data fase yang bergantung pada elevasi dipilih 0.006. Standar deviasi dari kesalahan data fase yang bergantung pada panjang baseline (per 10 km) dipilih 0. Standar deviasi dari kesalahan doppler dipilih 1. Process noise standar deviasi pada percepatan receiver (komponen vertikal dan horizontal) dipilih 0.1. Process noise standar deviasi pada biae (ambiguitas) data fase dipilih 0.0001. Process noise standar deviasi pada vertical ionospheric delay per 10 km dipilih 0.001. Process noise standar deviasi pada zenith tropospheric delay dipilih 0.0001. Tingkat kestabilan dari jam satelit dipilih 5 x 10-12. Nilai ini digunakan untuk interpolasi pada data pengamatan base station. 44 Gambar 3.12 Positions pada RTKLIB Dengan melihat pada gambar 3.12, posisi antena base station menggunakan X/Y/ZECEF (m). Posisi tersebut merupakan posisi titik di dalam koordinat kartesian 3 dimensi (geosentrik). Koordinat antena base station tersebut diperoleh dari daftar koordinat ITRF network yang telah ada ataupun single point positioning. Bisa juga koordinat base station tersebut didapat dari file yang di dalamnya terdapat daftar koordinat ITRF yaitu “stations.pos”. Gambar 3.13 Files pada RTKLIB 45 Jika menggunakan precise orbit, maka untuk menggunakan RTKLIB ini dengan baik harus di-input data igs08.atx (lihat gambar 3.13). File tersebut merupakan ANTEX antenna parameters untuk koreksi antena satelit PCV (Phase Center Variation) yang telah disediakan oleh IGS. Begitu juga dengan antena receiver, file tersebut digunakan jika ingin menerapkan koreksi PCV dan antenna phase center offset. DCB data file digunakan jika ingin melakukan pengkoreksian pada metode PPP dalam code format. Dari tahap pengaturan di atas selanjutnya pengaturan tersebut disimpan dan siap untuk diterapkan pada proses pengolahan data GPS kontinyu dengan menggunakan RTKLIB. 3. Tahap Pemrosesan dan Output Setelah pengaturan tepat dan benar, maka selanjutnya pemrosesan data dilakukan. Hasil dari pemrosesan data tersebut dapat dilihat pada contoh output file di bawah ini : Gambar 3.14 Output file pada RTKLIB Dapat dilihat pada output file di atas, header dan processing option muncul bersama dengan koordinat hasil titik rover per epok. Di dalamnya juga terdapat informasi mengenai nilai estimasi standar deviasi dari koordinat titik rover setiap epoknya. 46 Plotting grafik dari vektor pergeseran titik rover dalam koordinat toposentrik dapat dilihat pada gambar di bawah ini : Gambar 3.15 Hasil plot vektor pergeseran koordinat hasil titik rover pada RTKLIB Pada gambar di atas dapat dilihat vektor pergeseran titik rover. Grafik dengan sumbu E-W (m) menunjukkan besaran dan arah pergeseran barat-timur, grafik dengan sumbu N-S (m) menunjukkan besaran dan arah pergeseran utara-selatan, dan grafik dengan sumbu U-D (m) menunjukkan besaran dan arah pergeseran atas-bawah. Hasil ground track plot pada gambar 3.16 memberikan visualisasi posisi titik rover di permukaan tanah untuk setiap epoknya sehingga dapat dipahami dengan mudah visualisasi pergerakannya. 47 Gambar 3.16 Hasil ground track plot koordinat hasil titik rover pada RTKLIB 3.6 Pengolahan Data GPS Dengan TTC (Trimble Total Control) Pada tugas akhir ini, perangkat lunak TTC digunakan sebagai pembanding terhadap hasil pengolahan data GPS yang diperoleh dengan menggunakan RTKLIB. Dengan menerapkan konsep GPS kinematik, perangkat lunak ini dapat dijalankan untuk melakukan pengolahan data GPS kontinyu pada beberapa baseline pengamatan GPS yang dipilih. TTC didesain untuk melakukan perhitungan baseline secara otomatis. Hasil dari pengolahan data GPS dengan menggunakan TTC menghasilkan tingkat keakurasian 1 ppm dan bahkan lebih baik dari itu tergantung keakurasian ephemeris yang digunakan. Konsep secara umum pada pengolahan data dengan menggunakan TTC ini dapat tergambarkan dengan melihat tahapan-tahapan yang dilakukan saat pengolahan data GPS. Tahapan-tahapan tersebut meliputi : 1. Tahap Pra Pengolahan Data Pada tahapan ini data observasi GPS dalam bentuk RINEX dapat di-input satu per satu ke dalam TTC. Data berupa titik pengamatan GPS yang sudah di-input membentuk kombinasi baseline berdasarkan hubungan ketersediaan data pengamatan GPS pada day of year yang sama. Selanjutnya dapat di-input juga informasi pendukung lainnya seperti data navigation message dan precise ephemeris. 48 Dari beberapa baseline hasil kombinasi yang terbentuk secara otomatis dapat dipilih beberapa baseline yang ingin dilakukan pengolahan. Berikut ilustrasi pada TTC saat melakukan peng-input-an data pengamatan GPS beserta informasi pendukungnya : Gambar 3.17 Dialog window pada proses peng-input-an data dengan TTC Data pengamatan GPS dan informasi pendukung yang di-input pada perangkat lunak TTC merupakan data yang sama dengan data pengamatan GPS dan informasi pendukung yang di-input pada RTKLIB. Selanjutnya data ephemeris yang digunakan di-generate terlebih dahulu sebelum dilakukan pengolahan data sehingga tipe file yang digunakan sesuai dengan yang direkomendasikan pada TTC (gambar 3.18). Gambar 3.18 Generate Ephemeris 49 Koordinat pendekatan awal disetimasi dengan melakukan pemrosesan single point position (gambar 3.19). Single point position ini disebut juga dengan absolute position yaitu posisi suatu titik ditentukan secara langsung berdasarkan ketersediaan data yang ada tanpa bergantung kepada titik yang lainnya. Gambar 3.19 Single Point Position Single Point Position tersebut menghasilkan solusi yang tunggal yang datanya dapat juga langsung dimasukkan ke file data observasi. Berikut contoh koordinat hasil dari single poing position : Gambar 3.20 Koordinat hasil Single Point Position 50 2. Tahap Pemrosesan Data Setelah seluruh data yang akan digunakan sudah siap, tahap selanjutnya adalah tahap melakukan pemrosesan data tersebut. Mode pemrosesan (lihat gambar 3.21) yang digunakan pada TTC untuk mengolah data GPS kontinyu yang ada adalah OTF (OnThe-Fly). Maksud OTF di sini adalah pemrosesan data dilakukan pada waktu yang sangat singkat dan dengan jumlah data yang terbatas. Termasuk penentuan ambiguitas fase dari data pengamatan juga dilakukan secara on-the-fly. Dengan metode ini diharapkan dapat dicapai ketelitian hasil mencapai level centimeter. Gambar 3.21 Dialog window processing mode Pada prinsipnya data pengamatan GPS kontinyu diolah baseline per baseline dengan teknik double difference. TTC memiliki kemampuan untuk melakukan pengolahan baseline GPS secara satu per satu maupun secara serentak. Metode survei yang digunakan adalah secara kinematik sehingga koordinat hasil dapat diperoleh setiap interval waktu pengamatan. Koordinat hasil dari pengolahan data dengan TTC ini diberikan dalam bentuk koordinat toposentrik. 51 3. Tahap Export data Setelah selesai diproses, data di export ke dalam bentuk *.NGC file (gambar 3.22) yang selanjutnya data numerik yang terdapat di dalamnya tersebut akan di plot pada MATLAB. Gambar 3.22 Export hasil pengolahan data dengan TTC Berikut bentuk numerik dari koordinat hasil (dalam sistem koordinat toposentrik) pengolahan data dengan TTC : Gambar 3.23 Koordinat hasil pengolahan data dengan TTC (Dalam bentuk koordinat toposentrik n,e,u beserta standar deviasi estimasinya) 52 Tabel 3.4 Perbandingan strategi pengolahan baseline GPS antara RTKLIB dengan TTC No Parameter Pengolahan Data Dengan RTKLIB Dengan TTC 1 Recursive Least Square v - 2 Earth Tide Correction v - 3 Input Model Troposfer v - 4 Input Model Ionosfer v - 5 Input Phase Center Correction v - 6 Input DCB Correction v - 7 Input koordinat pendekatan v - 3.7 Bagan Pengolahan Baseline GPS Dengan RTKLIB dan TTC Pada Saat Tidak Terjadi Gempa Pengumpulan data pengamatan GPS Kontinyu Pengolahan Baseline Pada saat Tidak Pengolahan Baseline Pada saat Tidak Terjadi Gempa Dengan RTKLIB Terjadi Gempa Dengan TTC baseline < 5 km TSKB-TSK2 (3.8.1.1) baseline < 5 km TSKB-TSK2 (3.8.1.2) baseline 1-5 km ITB-UPI (3.8.2.1) baseline 1-5 km ITB-UPI (3.8.2.2) baseline 5-10 km MTKA-KGNI (3.8.3.1) baseline 5-10 km MTKA-KGNI (3.8.3.2) baseline 10-15 km UPI-TNKP (3.8.4.1) baseline 10-15 km UPI-TNKP (3.8.4.2) baseline 15-50 km PSKI-PARY (3.8.5.1) baseline 15-50 km PSKI-PARY (3.8.5.2) baseline 50-100 km MTKA-TSKB (3.8.6.1) baseline 50-100 km MTKA-TSKB (3.8.6.2) baseline 50-100 km BAKO-ITB (3.8.6.1) baseline 50-100 km BAKO-ITB (3.8.6.2) baseline 100-150 km USUD-KGNI (3.8.6.1) baseline 100-150 km USUD-KGNI (3.8.6.2) baseline 100-150 km USUD-MTKA (3.8.6.1) baseline 100-150 km USUD-MTKA (3.8.6.2) baseline 100-150 km PSKI-MSAI (3.8.7.1) baseline 100-150 km PSKI-MSAI (3.8.7.2) baseline 100-150 km PSKI-KTET (3.8.7.1) baseline 100-150 km PSKI-KTET (3.8.7.2) baseline 150-200 km USUD-TSKB (3.8.8.1) baseline 150-200 km USUD-TSKB (3.8.8.2) baseline > 400 km MTKA-MIZU (3.8.9.1) baseline > 400 km USUD-MIZU (3.8.9.1) Hasil Pengolahan Data dan Analisis Kesimpulan Gambar 3.24 Bagan Pengolahan Baseline GPS dengan RTK dan TTC 53 3.8 Analisis Hasil Pengolahan Baseline Pengamatan GPS Pada Saat Tidak Terjadi Gempa Pada sub bab ini membahas mengenai hasil pengolahan data dengan menggunakan RTKLIB maupun TTC beserta analisis kestabilan hasil pengolahan datanya. Pada pengujian kestabilan hasil pengolahan data ini, data pengamatan GPS yang digunakan adalah data pengamatan GPS pada beberapa stasiun pengamatan GPS (Data GPS kontinyu SuGAr, data IGS Network Jepang, dan data GPS kontinyu Jawa Barat) pada saat tidak terjadi gempa atau pada saat titik pengamatan GPS tidak mengalami deformasi yang signifikan dengan berbagai variasi panjang baseline. Dari pengolahan baseline GPS dengan RTKLIB maupun TTC dihasilkan solusi dalam bentuk koordinat toposentrik. Dari koordinat hasil tersebut dapat dibuat timeseriesnya serta dapat dihitung standar deviasi berdasarkan dataset tersebut. plotting timeseries dan standar deviasi tersebut dapat digunakan dalam melakukan analisis kestabilan pengolahan data GPS dengan RTKLIB maupun TTC. Tingkat keakurasian dan kepresisian dari hasil pengolahan baseline dengan RTKLIB dan TTC dapat dilihat pada kualitas sebaran data terhadap standar deviasinya. 3.8.1 Analisis Baseline < 1 km Pada Saat Tidak Terjadi Gempa Pada variasi panjang baseline ini digunakan baseline pengamatan GPS TSKB – TSK2 dengan panjang baseline-nya adalah 0.036 km atau 36 meter pada day of year 068 tahun 2011. Titik-titik pengamatan GPS ini terdapat di Jaring IGS Jepang. Selanjutnya baseline tersebut diolah dengan RTKLIB dan TTC dan divisualisasikan hasilnya melalui plotting timeseries serta standar deviasinya. 54 3.8.1.1 Analisis Baseline < 1 km Hasil Pengolahan Dengan RTKLIB Pada Saat Tidak Terjadi Gempa Baseline TSKB - TSK2 Gambar 3.25 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline TSKB – TSK2 dengan RTKLIB (Day of Year : 068) Pada gambar plotting standar deviasi (n dan e) di atas tampak bahwa pada baseline dengan panjang yang relatif sangat pendek (36 meter), dengan pengolahan baseline menggunakan RTKLIB menghasilkan kepresisian yang sangat baik. Sedikit sekali data hasil pengolahan baseline yang berada di luar range standar deviasi. Secara konsisten hasil pengolahan baseline mendekati nilai mean dari dataset. Secara konsisten juga antara hasil yang satu dengan hasil yang lainnya sebarannya saling mendekati. Standar deviasi sample pada hasil pengolahan baseline ini yaitu ± 3 mm. Hal ini menunjukkan bahwa hasil pengolahan data memiliki tingkat kepresisian yang sangat baik. Pengolahan baseline dengan RTKLIB pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS dengan orde centimeter hingga milimeter. 55 Gambar 3.26 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline TSKB – TSK2 dengan RTKLIB (Day of Year : 068), Sample Standard deviation : ± 0.0058 m ditunjukkan oleh warna magenta Pada gambar 3.26 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya cukup bagus yaitu ± 0.0058 m atau ± 5.8 mm. Hanya beberapa hasil pengolahan baseline saja yang berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. 56 Gambar 3.27 Timeseries hasil pengolahan baseline TSKB – TSK2 dengan RTKLIB (Day of Year : 068) Pada plotting timeseries gambar 3.27 terlihat hasil pengolahan datanya stabil (n dan e) dari awal hingga akhir. Hanya ada beberapa data hasil pengolahan di akhir yang kurang stabil. Salah satunya hal ini disebabkan oleh faktor di luar proses pengolahan data seperti efek random error atau noise pada data pengamatan GPS. Hal ini semakin diperkuat oleh visualisasi timeseries yang menunjukkan bahwa ambiguitas di seluruh epok pengamatan (100 %) dapat terselesaikan dengan baik menggunakan RTKLIB (warna hijau pada grafik menunjukkan bahwa ambiguitas fase yang dihasilkan merupakan ambiguitas fase yang fix / kebulatan nilainya terselesaikan dengan baik). Kesalahan jam receiver dan satelit telah tereliminasi serta kesalahan dan bias seperti bias troposfer, bias ionosfer, dan kesalahan orbit dapat tereduksi dengan baik dengan teknik double-difference. Sehingga dengan kesuksesan pereduksian dan pengeliminasian kesalahan dan bias pada data pengamatan GPS yang digunakan membuat solusi ambiguitas fasenya dapat diselesaikan dengan baik. 57 3.8.1.2 Analisis Baseline < 1 km Hasil Pengolahan Dengan TTC Pada Saat Tidak Terjadi Gempa Baseline TSKB - TSK2 Gambar 3.28 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline TSKB – TSK2 dengan TTC (Day of Year : 068) Pada hasil pengolahan baseline TSKB – TSK2 dengan TTC diperoleh standar deviasi ± 3.4 cm (gambar 3.28). Hal ini tidak lebih baik dari hasil pengolahan baseline yang sama dengan menggunakan RTKLIB. Hal ini disebabkan oleh adanya perbedaan model ionosfer, model ionosfer, dan koordinat pendekatan yang digunakan dalam pemrosesan data. Secara visual pada gambar 3.28 dapat dilihat bahwa data hasil pengolahan memiliki tingkat kepresisian yang kurang baik. Namun, mayoritas dari hasil pengolahan data memiliki kecenderungan nilainya dekat dengan mean. Berdasarkan informasi yang dihasilkan pada pengolahan baseline dengan TTC pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS dengan orde centimeter. 58 Gambar 3.29 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline TSKB – TSK2 dengan TTC (Day of Year : 068), Sample Standard deviation : ± 0.0104 m ditunjukkan oleh warna magenta Pada gambar 3.29 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya cukup bagus yaitu ± 0.0104 m atau ± 1.04 cm. Hanya beberapa hasil pengolahan baseline saja yang berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen vertikalnya lebih baik daripada standar deviasi pada komponen horizontalnya. Seharusnya dalam hal pengamatan GPS, umumnya kualitas komponen horizontal lebih baik daripada komponen vertikal. Dari kualitas standar deviasi yang dihasilkan dapat diketahui bahwa residu pengolahan data lebih banyak terdistribusi kepada komponen horizontal. 59 Gambar 3.30 Timeseries hasil pengolahan baseline TSKB – TSK2 dengan TTC (Day of Year : 068) Pada timeseries di atas tampak beberapa hasil pengolahan data di bagian pertengahan dan akhir pengamatan tidak stabil. Selain hasil pengolahan data di dua bagian tersebut secara keseluruhan hasil pengolahan datanya stabil. Hal ini disebabkan oleh ketidakberhasilan TTC dalam memecahkan ambiguitas fase pada epok pengamatan yang teridentifikasi hasilnya tidak stabil. Pada data numerik hasil pengolahan data menunjukkan ambiguitas fase pada bagian tersebut tidak fix (pada informasi numerik tertulis “DGPS”). Namun, mayoritas hasil pengolahan pada variasi baseline ini ambiguitas fasenya dapat terselesaikan dengan baik. 3.8.2 Analisis Baseline 1 – 5 km Pada Saat Tidak Terjadi Gempa Pada variasi panjang baseline ini digunakan baseline pengamatan GPS ITB – UPI dengan panjang baseline-nya adalah 3.9 km pada day of year 361 tahun 2009. Titiktitik pengamatan GPS merupakan titik pengamatan GPS kontinyu di Bandung. Selanjutnya baseline tersebut diolah dengan RTKLIB dan TTC dan divisualisasikan hasilnya melalui plotting timeseries serta standar deviasinya. 60 3.8.2.1 Analisis Baseline 1 – 5 km Hasil Pengolahan Dengan RTKLIB Pada Saat Tidak Terjadi Gempa Baseline ITB - UPI Gambar 3.31 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline ITB - UPI dengan RTKLIB (Day of Year : 361) Pada gambar plotting standar deviasi (n dan e) gambar 3.31 tampak bahwa dengan pengolahan baseline menggunakan RTKLIB pada variasi baseline 3.9 km menghasilkan kepresisian yang sangat baik. Tidak ada data hasil pengolahan baseline yang berada di luar range standar deviasi. Secara konsisten hasil pengolahan baseline mendekati nilai mean dari dataset. Secara konsisten juga antara hasil yang satu dengan hasil yang lainnya sebarannya saling mendekati. Standar deviasi sample pada hasil pengolahan baseline ini yaitu ± 7 mm. Hal ini menunjukkan bahwa hasil pengolahan data memiliki tingkat kepresisian yang sangat baik. Akan tetapi pada pengolahan baseline ini hanya 4% data yang terolah. Hal ini karena kualitas jam receiver yang kurang baik serta adanya obstruksi di sekitar titik pengamatan GPS. 61 Pengolahan baseline dengan RTKLIB pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS dengan orde centimeter hingga milimeter. Gambar 3.32 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline ITB - UPI dengan RTKLIB (Day of Year : 361), Sample Standard deviation : ± 0.0359 m ditunjukkan oleh warna magenta Pada gambar 3.32 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya cukup bagus yaitu ± 0.0359 m atau ± 3.59 cm. Tidak ada hasil pengolahan baseline yang berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya jauh lebih baik daripada standar deviasi pada komponen vertikalnya. 62 Gambar 3.33 Timeseries hasil pengolahan baseline ITB - UPI dengan RTKLIB (Day of Year : 361) Pada plotting timeseries gambar 3.33 terlihat hasil pengolahan datanya stabil. Pada visualisasi timeseries menunjukkan bahwa ambiguitas di seluruh epok pengamatan (100 %) dapat terselesaikan dengan baik menggunakan RTKLIB. Kesalahan jam receiver dan satelit telah tereliminasi serta kesalahan dan bias seperti bias troposfer, bias ionosfer, dan kesalahan orbit dapat tereduksi dengan baik dengan teknik doubledifference. Sehingga dengan kesuksesan pereduksian dan pengeliminasian kesalahan dan bias pada data pengamatan GPS yang digunakan membuat solusi ambiguitas fasenya dapat diselesaikan dengan baik. 63 3.8.2.2 Analisis Baseline 1 – 5 km Hasil Pengolahan Dengan TTC Pada Saat Tidak Terjadi Gempa Baseline ITB – UPI Gambar 3.34 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline ITB - UPI dengan TTC (Day of Year : 361) Pada hasil pengolahan baseline dengan TTC diperoleh standar deviasi ± 1.3 cm (gambar 3.34). Secara visual pada gambar 3.34 dapat dilihat bahwa data hasil pengolahan memiliki tingkat kepresisian yang cukup baik. Mayoritas dari hasil pengolahan data memiliki kecenderungan nilainya dekat dengan mean. Berdasarkan informasi yang dihasilkan pada pengolahan baseline dengan TTC pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS dengan orde centimeter. 64 Gambar 3.35 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline ITB - UPI dengan TTC (Day of Year : 361), Sample Standard deviation : ± 0.0203 m ditunjukkan oleh warna magenta Pada gambar 3.35 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya cukup bagus yaitu ± 0.0203 m atau ± 2.03 cm. Hanya beberapa hasil pengolahan baseline saja yang berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. Pada timeseries tampak beberapa hasil pengolahan data di bagian pertengahan pengamatan tidak stabil (lihat gambar 3.36). Selain hasil pengolahan data di bagian tersebut secara keseluruhan hasil pengolahan datanya stabil. Mayoritas hasil pengolahan pada variasi baseline ini ambiguitas fasenya dapat terselesaikan dengan baik. 65 Gambar 3.36 Timeseries hasil pengolahan baseline ITB - UPI dengan TTC (Day of Year : 361) 3.8.3 Analisis Baseline 5 – 10 km Pada Saat Tidak Terjadi Gempa Pada variasi panjang baseline ini digunakan baseline pengamatan GPS MTKA – KGNI dengan panjang baseline-nya adalah 7.5 km pada day of year 068 tahun 2011. Titik-titik pengamatan GPS ini terdapat di Jaring IGS Jepang. Selanjutnya baseline tersebut diolah dengan RTKLIB dan TTC dan divisualisasikan hasilnya melalui plotting timeseries serta standar deviasinya. 66 3.8.3.1 Analisis Baseline 5 – 10 km Hasil Pengolahan Dengan RTKLIB Pada Saat Tidak Terjadi Gempa Baseline MTKA - KGNI Gambar 3.37 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline MTKA - KGNI dengan RTKLIB (Day of Year : 068) Pada gambar plotting standar deviasi (n dan e) di atas tampak bahwa dengan pengolahan baseline menggunakan RTKLIB pada variasi baseline 7.5 km menghasilkan kepresisian yang cukup baik. Beberapa data hasil pengolahan baseline ada yang berada di luar range standar deviasi, akan tetapi mayoritas hasil pengolahan masuk di dalam range standar deviasi. Beberapa data yang dikategorikan sebagai outlier disebabkan oleh ketidakstabilan solusi pengolahan data pada awal waktu pengamatan. Secara konsisten hasil pengolahan baseline mendekati nilai mean dari dataset serta hasil yang satu dengan yang lainnya sebarannya saling mendekati. Standar deviasi sample pada hasil pengolahan baseline ini yaitu ± 3.6 cm. Hal ini menunjukkan bahwa hasil pengolahan data memiliki tingkat kepresisian yang cukup baik. Pengolahan baseline dengan RTKLIB pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS pada level centimeter. 67 Gambar 3.38 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline MTKA - KGNI dengan RTKLIB (Day of Year : 068), Sample Standard deviation : ± 0.0559 m ditunjukkan oleh warna magenta Pada gambar 3.38 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya kurang baik yaitu ± 0.0559 m atau ± 5.59 cm. Tidak ada hasil pengolahan baseline yang outlier. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. 68 Gambar 3.39 Timeseries hasil pengolahan baseline MTKA - KGNI dengan RTKLIB (Day of Year : 068) Pada plotting timeseries gambar 3.39 terlihat hasil pengolahan datanya stabil. Pada visualisasi timeseries menunjukkan bahwa ambiguitas fase 95.7 % dapat terselesaikan dengan baik menggunakan RTKLIB. Hasil pengolahan data GPS nampak tidak stabil pada awal pengamatan, akan tetapi setelah setengah jam pengamatan awal hasil pengolahan baseline menjadi sangat stabil. 69 3.8.3.2 Analisis Baseline 5 – 10 km Hasil Pengolahan Dengan TTC Pada Saat Tidak Terjadi Gempa Baseline MTKA - KGNI Gambar 3.40 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline MTKA - KGNI dengan TTC (Day of Year : 068) Pada hasil pengolahan baseline dengan TTC diperoleh standar deviasi ± 0.58 m (gambar 3.40). Secara visual pada gambar di atas dapat dilihat bahwa data hasil pengolahan memiliki tingkat kepresisian yang tidak baik. Hanya beberapa dari hasil pengolahan data memiliki kecenderungan nilainya dekat dengan mean. Berdasarkan informasi yang dihasilkan pada pengolahan baseline dengan TTC pada variasi panjang ini kurang baik digunakan untuk mendeteksi pergerakan titik pengamatan GPS dengan orde centimeter. 70 Gambar 3.41 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline MTKA - KGNI dengan TTC (Day of Year : 068), Sample Standard deviation : ± 0.8861 m ditunjukkan oleh warna magenta Pada gambar 3.41 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya tidak baik yaitu ± 0.8861 m atau ± 88.61 cm. Beberapa hasil pengolahan baseline berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. Pada timeseries gambar 3.42 tampak beberapa hasil pengolahan data di bagian pertengahan pengamatan tidak stabil. Selain hasil pengolahan data di bagian tersebut secara keseluruhan hasil pengolahan datanya stabil. Mayoritas hasil pengolahan pada variasi baseline ini ambiguitas fasenya dapat terselesaikan dengan baik. 71 Gambar 3.42 Timeseries hasil pengolahan baseline MTKA - KGNI dengan TTC (Day of Year : 068) 3.8.4 Analisis Baseline 10 – 15 km Pada Saat Tidak Terjadi Gempa Pada variasi panjang baseline ini digunakan baseline pengamatan GPS UPI – TNKP dengan panjang baseline-nya adalah 10.8 km pada day of year 010 tahun 2010. Titiktitik pengamatan GPS ini merupakan titik pengamatan GPS kontinyu di Bandung. Selanjutnya baseline tersebut diolah dengan RTKLIB dan TTC dan divisualisasikan hasilnya melalui plotting timeseries serta standar deviasinya. 72 3.8.4.1 Analisis Baseline 10 – 15 km Hasil Pengolahan Dengan RTKLIB Pada Saat Tidak Terjadi Gempa Baseline UPI - TNKP Gambar 3.43 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline UPI - TNKP dengan RTKLIB (Day of Year : 010) Pada gambar plotting standar deviasi (n dan e) di atas tampak bahwa dengan pengolahan baseline menggunakan RTKLIB pada variasi baseline 10.8 km menghasilkan kepresisian yang tidak baik. Banyak data hasil pengolahan baseline yang berada di luar range standar deviasi. Hal ini disebabkan oleh ketidaksuksesan RTKLIB dalam melakukan pengolahan data hingga pada akhir waktu pengamatan. Data pengamatan GPS yang terolah dengan baik hanya 4% dari total keseluruhan, sedangkan 4% lainnya solusinya ditentukan dengan absolute positioning, dan sisanya tidak dapat diestimasi parameter posisinya. Ada kecenderungan hasil pengolahan baseline mendekati nilai mean dari dataset akan tetapi tidak dapat ditarik kesimpulan secara tegas. Hasil yang satu dengan yang lainnya sebarannya tidak saling mendekati. Standar deviasi sample pada hasil pengolahan baseline ini yaitu ± 1.767 m. Hal ini menunjukkan bahwa hasil pengolahan data memiliki tingkat kepresisian sangat buruk. 73 Gambar 3.44 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline UPI - TNKP dengan RTKLIB (Day of Year : 010), Sample Standard deviation : ± 4.5848 m ditunjukkan oleh warna magenta Pada gambar 3.44 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya buruk yaitu ± 4.5848 m. Beberapa hasil pengolahan baseline berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. 74 Gambar 3.45 Timeseries hasil pengolahan baseline UPI - TNKP dengan RTKLIB (Day of Year : 010) Pada plotting timeseries di atas terlihat hasil pengolahan datanya tidak stabil setelah jam 01:00 UTC. Pada visualisasi timeseries menunjukkan bahwa ambiguitas fase tidak ada yang terselesaikan dengan baik menggunakan RTKLIB. Ambiguitas hanya menghasilkan solusi float. Hal ini sangat mempengaruhi dalam pengestimasian parameter posisinya. Ketidaksuksesan RTKLIB dalam melakukan pengolahan data dapat disebabkan oleh kualitas data yang tidak baik. Kualitas data tersebut bergantung kepada kualitas jam receiver dan obstruksi yang ada di lapangan. 75 3.8.4.2 Analisis Baseline 10 – 15 km Hasil Pengolahan Dengan TTC Pada Saat Tidak Terjadi Gempa Baseline UPI - TNKP Gambar 3.46 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline UPI - TNKP dengan TTC (Day of Year : 010) Pada hasil pengolahan baseline dengan TTC diperoleh standar deviasi ± 14.2 cm (gambar 3.46). Secara visual pada gambar di atas dapat dilihat bahwa data hasil pengolahan memiliki tingkat kepresisian yang kurang baik untuk panjang baseline yang relatif pendek. Mayoritas dari hasil pengolahan data memiliki kecenderungan nilainya dekat dengan mean. Berdasarkan informasi yang dihasilkan pada pengolahan baseline dengan TTC pada variasi panjang ini kurang baik digunakan untuk mendeteksi pergerakan titik pengamatan GPS dalam orde centimeter. 76 Gambar 3.47 Plotting standar deviasi komponen vertikal dari hasil pengolahan baseline UPI - TNKP dengan TTC (Day of Year : 010), Sample Standard deviation : ± 0.6266 m ditunjukkan oleh warna magenta Pada gambar 3.47 dapat dilihat sebaran nilai standar deviasi komponen vertikal hasil pengolahan baseline di setiap epoknya terhadap mean. Nilai sample standar deviasinya tidak bagus yaitu ± 0.6266 m atau ± 62.66 cm. Beberapa hasil pengolahan baseline berada di luar standar deviasi 3σ. Jika dibandingkan dengan standar deviasi pada komponen horizontal, pada baseline ini standar deviasi pada komponen horizontalnya lebih baik daripada standar deviasi pada komponen vertikalnya. Pada timeseries gambar 3.48 tampak beberapa hasil pengolahan data di bagian pertengahan awal pengamatan tidak stabil. Selain hasil pengolahan data di bagian tersebut secara keseluruhan hasil pengolahan datanya stabil. Mayoritas hasil pengolahan pada variasi baseline ini ambiguitas fasenya dapat terselesaikan dengan baik. 77 Gambar 3.48 Timeseries hasil pengolahan baseline UPI - TNKP dengan TTC (Day of Year : 010) 3.8.5 Analisis Baseline 15 – 50 km Pada Saat Tidak Terjadi Gempa Pada variasi panjang baseline ini digunakan baseline pengamatan GPS PSKI – PARY dengan panjang baseline-nya adalah 41.3 km pada day of year 293 tahun 2010. Titik-titik pengamatan GPS ini merupakan titik pengamatan GPS SuGAr. Selanjutnya baseline tersebut diolah dengan RTKLIB dan TTC dan divisualisasikan hasilnya melalui plotting timeseries serta standar deviasinya. 78 3.8.5.1 Analisis Baseline 15 – 50 km Hasil Pengolahan Dengan RTKLIB Pada Saat Tidak Terjadi Gempa Baseline PSKI - PARY Gambar 3.49 Plotting standar deviasi komponen horizontal dari hasil pengolahan baseline PSKI – PARY dengan RTKLIB (Day of Year : 293) Pada gambar plotting standar deviasi (n dan e) di atas tampak bahwa dengan pengolahan baseline menggunakan RTKLIB pada variasi baseline 41.3 km menghasilkan keakurasian dan kepresisian yang cukup baik. Beberapa data hasil pengolahan baseline ada yang berada di luar range standar deviasi, akan tetapi mayoritas hasil pengolahan masuk di dalam range standar deviasi. Beberapa data yang dikategorikan sebagai outlier disebabkan oleh ketidakstabilan solusi pengolahan data pada awal waktu pengamatan. Hasil pengolahan baseline mendekati nilai mean dari dataset serta hasil yang satu dengan yang lainnya sebarannya saling mendekati. Standar deviasi sample pada hasil pengolahan baseline ini yaitu ± 3.0 cm. Hal ini menunjukkan bahwa hasil pengolahan data memiliki tingkat kepresisian yang cukup baik. Pengolahan baseline dengan RTKLIB pada variasi panjang ini memungkinkan digunakan untuk mendeteksi pergerakan titik pengamatan GPS pada level centimeter. 79