Vektor-vektor basis ortogonal
advertisement

CHAPTER 6.
INNER PRODUCT SPACE
•
•
•
•
•
Inner Products
Angle and Orthogonality in Inner Product
Spaces
Orthonormal Bases; Gram-Schmidt Process;
QR-Decomposition
Best Approximation; Least Squares
Orthogonal Matrices; Change of Basis
6.3. Basis Orthogonal
Proses Gram-Schmidt;
Dekomposisi QR
Basis Orthogonal dan Orthonormal
• Suatu himpunan vektor dalam ruang hasil kali dalam disebut
himpunan ortogonal jika semua pasangan vektor-vektor
yang berbeda dalam himpunan tersebut ortogonal.
• Suatu himpunan ortogonal dimana setiap vektor mempunyai
norma 1 disebut orthonormal.
Dua vektor u dan v dalam suatu hasil kali dalam disebut
ortogonal jika u, v = 0.
Himpunan W = { v1, v2, … , vn} adalah ortonormal jika:
0, jika i ≠ j
vi,vj = <vi, vj> =
1, jika i = j
Basis Orthogonal dan Orthonormal
Contoh:
• Jika u1 = (0, 1, 0), u2 = (1, 0, 1), u3 = (1, 0, -1) dan R3
mempunyai hasil kali dalam Euclidean, maka himpunan vektorvektor S = {u1, u2, u 3} adalah ortogonal karena :
u1, u2 = u1, u3 = u2, u3 = 0.
u1, u2 = 0.1+1.0+0.1 = 0
u1, u3 = 0.1 + 1.0 + 0.(-1) = 0
u2, u3 = 1.1 + 0.0 + 1.(-1) = 0
Matriks Orthogonal
•
Himpunan ortogonal dalam Rn Matriks diagonal.
•
Kolom-kolom matriks Qmxn membentuk himpunan yang
ortonormal jika dan hanya jika QTQ = In.
•
Matriks Anxn yang kolom-kolomnya membentuk himpunan
yang ortonormal disebut matriks ortogonal.
•
Matriks Anxn adalah matriks ortogonal jika dan hanya jika
Q-1=QT (atau dengan kata lain QTQ=QQT=In)
Q-1=QT
QTQ = QQT= In
Matriks Orthogonal
Tunjukkan bahwa matriks berikut merupakan matriks ortogonal:
Normalisasi Vektor tak- nol
Jika v adalah vektor tak nol dalam suatu ruang hasil kali dalam, maka
mempunyai norma 1, karena;
•
Proses mengalikan suatu vektor tak-nol v dengan kebalikan
panjangnya untuk mendapatkan suatu vektor bernorma 1
disebut menormalkan v.
•
Suatu himpunan vektor-vektor yang orthogonal bisa selalu
diubah menjadi suatu himpunan ortonormal dengan
menormalkan masing-masing vektornya.
Contoh Menormalkan Vektor Tak-Nol
Jika u1 = (0, 1, 0), u2 = (1, 0, 1), u3 = (1, 0, -1)
Norma Euclidean :
•
u1
2, u3
2
Normalisasi u1, u2, and u3 :
•
v1
•
1, u2
u1
u1
(0,1,0),
v2
u2
u2
(
1
1
,0,
),
2
2
Himpunan S = { v 1, v 2, v
3
}
v3
u3
u3
(
1
,0,
2
1
)
2
orthonormal dimana:
Koordinat Relatif Terhadap Basis Ortogonal
Ruang Hasil
Kali Dalam
Basis Ortonormal basis yang berisi vektor-vektor
ortonormal
Contoh: basis standard untuk R3 dengan hasil kali
dalam Euclidean : I = (1,0,0); j = (0,1,0); k = (0,0,1)
Basis Orthogonal basis yang terdiri dari vektorvektor orthogonal.
Secara umum, basis standard hasil kali dalam Euclidean Rn:
e1 = (1,0,0,.., n);
e2 = (0, 1,0,…,n);
….. ; en = (0,0,0,…, 1)
Koordinat Relatif Terhadap Basis Ortonormal
Teorema:
Jika S= {v1, v2,… , vn} adalah suatu basis ortonormal
untuk suatu ruang hasil kali dalam V, dan u adalah
sebarang vektor dalam V, maka
u = u, v1 v1 + u, v2 v2 + · · · + u, vn vn
u, v1 , u, v2 , … , u, vn
koordinat-koordinat dari u
relatif terhadap basis
ortonormal S = {v1, v2, …, vn}
(u)S = ( u, v1 , u, v2 , … , u, vn ) vektor koordinat dari
u relatif terhadap basis ini.
Contoh
• Jika v1 = (0, 1, 0), v2 = (-4/5, 0, 3/5), v3 = (3/5, 0, 4/5),
buktikan bahwa S = {v1, v2, v3} adalah suatu basis
ortonormal untuk R3 dengan hasil kali dalam Euclidean.
• Nyatakan vektor u = (1, 1, 1) sebagai kombinasi linier dari
vektor-vektor dalam S dan cari vektor koordinat (u)s.
Jawab:
u, v1 = 1, u, v2 = -1/5, u, v3 = 7/5
u = v1 – 1/5 v2 + 7/5 v3
ortonormal
Vektor koordinat u relatif terhadap S
(u)s=( u, v1 , u, v2 , u, v3 ) = (1, -1/5, 7/5)
Basis Orthonormal
Jika S adalah suatu basis ortonormal untuk suatu ruang hasil
kali dalam berdimensi –n dan jika (u)s = (u1, u2, …, un) dan
(v)s = (v1, v2, …, vn) maka:
u
u12 u 22 u n2
d (u, v )
u, v
(u1 v1 ) 2 (u 2 v2 ) 2 (un vn ) 2
u1v1 u 2 v2 u n vn
Basis Orthonormal
Contoh:
Diketahui v1 = (0, 1, 0), v2 = (-4/5, 0, 3/5), v3 = (3/5, 0, 4/5), dan
S = {v1, v2, v3} adalah suatu basis ortonormal untuk R3 dengan hasil
kali dalam Euclidean. Vektor u = (1, 1, 1) merupakan kombinasi linier
dari vektor-vektor dalam S dan vektor koordinat (u)s =( u, v1 , u, v2 ,
u, v3 ) = (1, -1/5, 7/5)
Maka norma vektor u = (1,1,1) adalah :
Norma u juga bisa dihitung berdasarkan vektor koordinat
(u)s = (1, -1/5, 7/5)
Kombinasi Linier Vektor dalam Basis Ortogonal S
• Jika S = {v1, v2, …, vn} adalah suatu basis ortogonal untuk suatu
ruang vektor V, maka menormalkan masing-masing vektor ini
menghasilkan basis ortonormal:
vn
v1 v 2
,
,,
v1 v 2
vn
S'
• Jika u sebarang vektor dari V berlaku:
atau
u
u,
u
v1
v1
v1
v1
u, v1
v1
2
u,
v1
v2
v2
v2
v2
u, v 2
v2
2
v2
u,
vn
vn
u, v n
vn
2
vn
vn
vn
• Rumus ini menyatakan u sebagai kombinasi linier dari vektorvektor dalam basis ortogonal S.
Orthonormal Basis
Jika S = {v1, v2, …, vn} adalah suatu himpunan vektor-vektor
tak nol yang ortogonal dalam suatu ruang hasil kali dalam,
maka S bebas linier
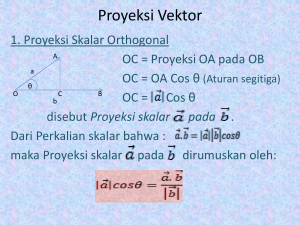
Proyeksi Ortogonal
Dalam R2 atau R3 dengan
hasil kali dalam Euclidean,
secara geometris, jika W
adalah suatu garis atau
bidang yang melalui titik
asal, maka setiap vektor u
dalam
ruang
tersebut
dinyatakan sebagai:
u = w1 + w2
dimana w1 berada dalam W
dan
w2 tegak lurus
terhadap W (W ).
w1 proyeksi ortogonal u pada W proywu
w2 komponen u yang ortogonal terhadap W proy
w
u
Proyeksi Ortogonal
w1 proyeksi ortogonal u pada W proywu
w2 komponen u yang ortogonal terhadap W proy
Karena w2 = u – w1
u = proyw u + (u – proy
w
u)
w
u
Basis Orthonormal
Anggap W adalah suatu sub-ruang berdimensi terhingga dari
suatu ruang hasil kali dalam V.
a. Jika {v1, …, vr} adalah suatu basis orthonormal untuk W
dan u adalah sebarang vektor dalam V, maka
projwu = u,v1 v1 + u,v2 v2 + … + u,vr vr
b. Jika {v1, …, vr} adalah suatu basis ortogonal untuk W dan
u adalah sebarang vektor dalam V, maka
projW u
u, v1
v1
2
v1
u, v 2
v2
2
v2
u, v r
vr
2
vr
Contoh
Jika R3 memiliki hasil kali dalam Euclidean, dan anggap W
adalah sub ruang yang terentang oleh vektor-vektor
ortonormal v1 = (0, 1, 0) dan v2 = (-4/5, 0, 3/5) maka :
•
Proyeksi ortogonal u = (1, 1, 1) pada W adalah
•
Komponen u ortogonal terhadap W adalah:
Basis Ortogonal dan Ortonormal
Teori
Setiap ruang hasil kali dalam tak-nol berdimensi terhingga
mempunyai suatu basis ortonormal.
Proses mengubah suatu basis sebarang menjadi suatu basis
ortonormal disebut Proses Gram-Schmidt
Proses Gram-Schmidt
Misal V adalah sebarang ruang hasil kali dalam tak-nol berdimensi
terhingga , {u1, u2, …, un} adalah sebarang basis untuk V.
Untuk menghasilkan suatu basis ortogonal {v1, v2, …, vn} untuk V
dilakukan proses Gram Schmidt berikut:
Langkah 1:
Anggap v1 = u1
Langkah 2:
Hitung v2 ortogonal v1 dengan
menghitung komponen u2 yang
ortogonal terhadap ruang
W1 yang terentang v1 :
Proses Gram-Schmidt
Langkah 3 :
Susun vektor v3 yang ortogonal terhadap
v1 dan v2, dengan
menghitung komponen u1 yang ortogonal terhadap ruang W2 yang
terentang oleh v1 dan v2.
Langkah 4:
Untuk menentukan vektor v4 yang ortogonal terhadap v1, v2 dan v3,
hitung komponen u4 yang ortogonal terhadap ruang W3 yang
terentang oleh v1, v2 dan v3.
Vektor-vektor basis ortogonal dinormalkan
basis ortonormal V
Contoh Proses Gram-Schmidt
Tinjau ruang vektor R3 dengan hasil kali dalam Euclidean.
Terapkan proses Gram Schmidt untuk mengubah vektor-vektor
basis u1 = (1, 1, 1), u2 = (0, 1, 1), u3 = (0, 0, 1)
Menjadi suatu basis ortogonal {v1, v2, v3}; kemudian normalkan
vektor basis ortogonal tersebut untuk mendapatkan suatu basis
ortonormal {q1, q2, q3}.
Jawab :
Step 1: Anggap v1 = u1 v1 = u1 = (1, 1, 1)
Step 2: Anggap v2 = u2 – projW1u2.
u1 = (1, 1, 1), u2 = (0, 1, 1), u3 = (0,0, 1)
• Step 3: Anggap v3 = u3 – projW2u3.,
• Jadi v1 = (1, 1, 1), v2 = (-2/3, 1/3, 1/3), v3 = (0, -1/2, 1/2)
membentuk suatu basis ortogonal untuk R3. Norma
vektor-vektor ini adalah:
Sehingga basis ortonormal untuk R3 adalah:
Dekomposisi QR
Jika A adalah suatu matriks nxn dengan vektor-vektor kolom
yang bebas secara linier, maka A bisa difaktorkan sebagai :
A = QR
Q matriks m n dengan vektor-vektor kolom yang
ortonormal, dimana QTQ = I
R matriks segitiga atas nxn yang dapat dibalik.
Jika QTQ = I, maka :
QTA = QTQR
= IR
Q TA = R
Dekomposisi QR
Example : QR-Decomposition of a 3 3 Matrix
Carilah dekomposisi QR dari
1 0 0
A
1 1 0
1 1 1
Jawab :
• Vektor-vektor kolom A adalah:
• Dengan menerapkan proses Gram-Scmidht dengan
rangkaian normalisasi seperti contoh sebelumnya
didapat:
q1
1/ 3
2/ 6
1/ 3 , q 2
1/ 6
1/ 3
1/ 6
0
, q3
1/ 2
1/ 2
Q
R matriks
Dekomposisi QR dari A :
6.5.
Change of Basis
Orthogonal Matrices
2012/5/2
Elementary Linear Algebra
29
Matriks-matriks Orthogonal
Definisi:
Suatu matriks bujursangkar A dengan sifat
A-1 = AT
Disebut sebagai matriks ortogonal, dimana;
AAT = ATA = I
30
Matriks-matriks Orthogonal
Matriks
adalah matriks ortogonal, karena;
AAT = ATA = I
Matriks
adalah ortogonal dimana terbukti ATA = 1, maka
vektor baris dan vektor kolomnya membentuk himpunan ortogonal.
Sifat Dasar Matriks-matriks Orthogonal
Teorema:
Untuk suatu matriks Anxn:
•
•
•
A ortogonal
Vektor-vektor baris dari A membentuk suatu himpunan
ortonormal pada Rn dengan hasil kali dalam Euclidean.
Vektor-vektor kolom dari A membentuk suatu himpunan
ortonormal pada Rn dengan hasil kali dalam Euclidean.
Teorema:
1.
Invers dari suatu matriks ortogonal adalah ortogonal.
2. Hasil kali matriks-matriks ortogonal adalah ortogonal.
3. Jika A ortogonal, maka det(A) = 1 atau det(A) = -1
Matriks Orthogonal Sebagai Operator Linear
Teorema:
Jika A adalah matriks nxn, maka pernyataan berikut
ekuivalen:
•
•
•
A ortogonal.
untuk semua x pada Rn.
Ax. Ay = x. y untuk semua x dan y pada Rn.
Perubahan Basis
Matriks Koordinat
Jika S= {v1, v2,…, vn} adalah suatu basis untuk suatu ruang vektor
V, maka setiap vektor v dalam V dapat dinyatakan sebagai suatu
kombinasi linear dari vektor-vektor basis:
v = k1v1 + k2v2 +… + knvn
k1,k2 , …, kn koordinat v relatif terhadap S, dan vektor :
vs = (k1, k2,…kn) vektor koordinat v relatif terhadap S.
Matriks koordinat v relatif terhadap S dinyatakan oleh [v]s adalah
matriks berukuran nx1 yang didefinisikan sebagai:
Matriks koordinat v relatif terhadap S.
Matriks Koordinat Ortonormal
Teorema:
Jika S= {v1, v2,… , vn} adalah suatu basis ortonormal untuk
suatu ruang hasil kali dalam V, dan u adalah sebarang vektor
dalam V, maka
u = u, v1 v1 + u, v2 v2 + · · · + u, vn vn
u, v1 , u, v2 , … , u, vn
koordinat-koordinat dari u relatif
terhadap basis ortonormal S = {v1,
v2, …, vn}
(u)S = ( u, v1 , u, v2 , … , u, vn ) vektor koordinat dari u
relatif terhadap basis ini.
Matriks koordinat v relatif terhadap S.
Contoh Matriks Koordinat
Masalah Perubahan Basis
Jika kita merubah basis untuk suatu ruang vektor V dari old basis
B to some new basis B’ , bagaimana matriks koordinat lama [v]B dari
vektor v dikaitkan dengan matriks koordinat baru [v]B’ ?
Masalah Perubahan Basis
matriks koordinat lama [v]B
matriks koordinat baru [v]B’
Persamaan ini menyatakan bahwa matriks koordinat lama [v]B
dihasilkan jika kita mengalikan dari kiri matriks koordinat baru
[v]B’ dengan matriks:
Solution of the Change-of-Basis Problem
Jika kita mengubah basis untuk suatu ruang vektor V dari suatu basis
lama B = ( b1, b2,…, bn ) menjadi suatu basis B’ = ( b’1, b’2,…, b’n ) , maka
matriks koordinat lama [v]B dari suatu vektor v dihubungkan dengan
matriks koordinat baru [v]B’ dari suatu vektor v yang sama dengan
persamaan:
Dimana kolom-kolom dari P adalah matriks –matriks koordinat dari
vektor-vektor basis baru relatif terhadap basis lama, yaitu vektorvektor kolom dari P adalah ;
Matriks P disebut matriks transisi dari B’ ke B, dinyatakan dalam
bentuk vektor-vektor kolomnya sebagai ;
Example
Consider the bases
and
for R 2, where
(a) Find the transition matrix from B’ to B
(b) Use
to find [v]B if
Solution (a)
First we must find the coordinate vectors for the new basis vectors u’ 1 and u’2
relative to the old basis B.
Solution (b)
Matriks Transisi
Jika P adalah matriks transisi dari suatu basis ortonormal ke basis
ortonormal lainnya untuk suatu ruang hasil kali dalam, maka P
adalah suatu matriks ortogonal, yaitu :
P-1 = PT
Jika P adalah matriks transisi dari suatu basis B’ ke suatu basis B,
maka untuk setiap vektor v berlaku:
Penerapan Pada Rotasi Sumbu Koordinat
B = (u1, u2)
B’ = (u1’, u2’)
Sumbu koordinat x’ dan
y’
didapat
dengan
merotasi
sumbu
xy
berlawanan jarum jam
terhadap
titik
asal
dengan sudut θ.
(x,y)
Q
(x’ ,y’)
P = transisi dari B’ ke B.
Rotasi Sumbu Koordinat
Didapat P matriks
ortogonal
Komponen u1’ pada basis lama:
1. cos θ
2. sin θ
Komponen u2’ pada basis lama:
1. cos (θ+ π/2) = -sin θ
2. sin (θ+ π/2) = cosθ
P-1 = PT
Misal sumbu sumbu tersebut dirotasikan dengan θ = π/4, maka;
Jika (x, y) = (2, -1), maka koordinat baru dari Q: