proposal penelitian - Universitas Sumatera Utara
advertisement

BAB II
LANDASAN TEORI
II.1.Anatomi Pesawat Terbang
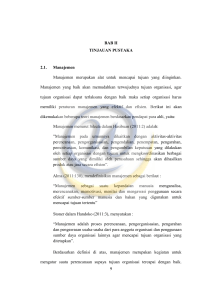
Komponen utama dari pesawat terbang adalah ditunjukkan pada gambar 2.1.
Fuselage adalah badan pesawat,dimana bagian ini adalah bagian yang paling banyak
kegunaannya pada pesawat, fuselage membawa penumpang,barang bawaan dan
berbagai muatan,peralatan bahan bakar dan berbagai benda sesuai dengan rancangan
pesawat.Sayap adalah penghasil gaya angkat pada pesawat, volume internal dari
pesawat
dapat digunakan untuk untuk menampung bahan bakar dan menyimpan
peralatan pendaratan (roda dan penopang (struts) pendukung) setelah pesawat lepas
landas. Penempatan dan penyesuaian ukuran stabilizer pada pesawat untuk
memberikan stabilitas pada pesawat selama melakukan penerbangan .
Gambar 2.1.Anatomi Pesawat
Universitas Sumatera Utara
Flaps dan kontrol permukaan digambarkan pada gambar 2.2. Flaps digunakan
untuk menambah gaya angkat pesawat. Aileron adalah kontrol permukaaan yang
mengontrol gerak guling (rolling) pesawat,sebagai contoh, ketika aileron sebelah kiri
turun kebawah sedangkan aileron sebelah kanan naik ke atas, maka gaya angkat akan
bertambah pada sayap kiri sedangkan pada sayap kanan gaya angkatnya akan
berkurang yang akan menyebabkan pesawat akan berguling (roll) kearah
kanan.Elevator adalah kontrol permukaan yang mengatur gerak naik turun pesawat,
ketika elevator turun ke bawah maka gaya angkat pada ekor pesawat akan bertambah
dan menyebabkan ekor pesawat akan tertarik untuk naik sementara hidung pesawat
akan turun ke bawah. Rudder adalah kontrol permukaan yang dapat membelokkan
hidung pesawat ke kanan atau ke kiri.
Gambar 2.2 Kontrol Permukaan Pesawat (surface control)
Dengan meninjau pesawat pada gambar 2.3 dapat dilihat titik berat yang
dinotasikan sebagai cg. Sumbu orthogonal xyz adalah tetap; sumbu x disepanjang
fuselage, sumbu y disepanjang rentang sayap tegak lurus dengan dengan sumbu y, dan
sumbu z yang mengarah ke bawah yang tegak lurus dengan bidang xy. Gerak translasi
pesawat diberikan oleh komponen kecepatan yaitu U, V, dan W pada arah x, y , dan z.
Universitas Sumatera Utara
Gerak rotasi diberikan oleh komponen kecepatan angular P, Q, dan R.
Kecepatan rotasi ini menyebabkan momen L’, M dan N, pada sumbu x, y, dan z.
Gambar 2.3. Sumbu gerak dan titik pusat berat pesawat
Gerak rotasi di sepanjang sumbu x disebut sebagai gerak guling, L’ dan P
masing-masing disebut sebagai momen dan kecepatan. Gerak rotasi pada sumbu y
disebut gerak ketinggian (pitch); M dan Q masing-masing adalah momen dan
kecepatan. Gerak pada sumbu z disebut gerak geleng (yaw) dengan N dan R adalah
momen dan kecepatannya.
Tiga dasar kontrol pada gerak pesawat yaitu: aileron , elevator dan rudder
dimana ketiga komponen ini didsisain untuk mengubah kontrol dan momen pada
sumbu x,y,dan z. Pada gambar 2.3 dapat dilihat kontrol permukaan yaitu flap yang
dapat bergerak ke depan dan kebelakang bergantung pada perintah pilot
Universitas Sumatera Utara
Gambar 2.4a.gerak mengguling (roll)
Gambar 2.4.b. gerak longitudinal
Gambar 2.4.c.kontrol gerak menggeleng (yawing)
Gambar 2.4
Mengacu pada gambar 2.2, dapat dilihat bahwa dari sini bahwa aileron
mengontrol gerak guling (roll) pesawat yang disebut sebagai disebut sebagai kontrol
lateral. Kemudian juga dapat dilihat bahwa dari sini elevator mengatur ketinggian
pesawat dan disebut sebagai kontrol longitudinal, dan dapat juga dilihat bahwa rudder
mengatur gerak geleng (yaw) dari pesawat,yang disebut sebagai kontrol langsung
(directional).
Universitas Sumatera Utara
II.2.
Pengertian Gerak Longitudinal Pada Pesawat
Yang dimaksud sebagai gerak longitudinal pada pesawat adalah gerak yang
meliputi ekor sampai hidung pesawat, adapun yang termasuk pada gerak longitudinal
pesawat ini meliputi :
1. Kontrol elevator (kontrol sirip pengatur ketinggian)
2. Kontrol Sudut Serang
3. Kontrol kecepatan
Didalam gerak longitudinal pesawat terdapat dua mode gerak yang pertama
adalah mode gerak osilasi pendek dan yang kedua adalah mode gerak phugoid. Yang
dimaksud dengan mode gerak osilasi pendek adalah gerak yang teredam penuh (hal
ini dapat dilihat pada persamaan gerak 3.48). Yaitu gerak ini memiliki redaman yang
besar. Hal ini pada pesawat terbang mempengaruhi sudut serang α dan sudut
ketinggian pesawat θ . Sedangkan gerak dengan osilasi yang memiliki periode yang
panjang disebut sebagai mode gerak phugoid. Mode gerak phugoid mempengaruhi
dua parameter dalam gerak pesawat yaitu sudut ketinggian θ dan kecepatan u, pada
mode gerak phugoid ini sudut serang tidak berubah atau konstan.
II.3.Kriteria Kestabilan Nyquist
Dasar dari pemikiran analisis kestabilan Nyquist adalah untuk menyelidiki
kondisi sistem lup terbuka dengan yang berosilasi dengan osilasi yang dapat terjadi
apabila sistem memiliki umpan balik.
Respons frekuensi dari fungsi alih sistem dapat dinyatakan dengan memplot
L( jω ) kedalam diagram polar dimana L adalah:
L = PC
...(2.1)
L=fungsi alih lup
P=Plant
C=Controller
Universitas Sumatera Utara
Besar dari | L( jω ) | disebut sebagai penguatan lup (loop gain) karena bagian ini
menyatakan seberapa jauh sinyal dapat diperkuat. Keadaan osilasi dari sistem
diberikan oleh persamaan :
L( jω 0 ) = −1
...(2.2)
Persamaan 2.2 menyatakan bahwa kurva Nyquist dari fungsi alih lup akan
melalui titik L=-1, yang disebut titik kritis (critical point). Dan sistem akan stabil
apabila |L( jω )|<1 , yang berarti kurva Nyquist pada titik kritis -1 ada pada sisi kiri
kurva Nyquist. Untuk sistem yang tidak memiliki pole pada sisi sebelah kanan bidang
kompleks maka kondisi kestabilan adalah apabila plot Nyquist tidak mengelilingi titik
kritis -1.
Teorema kestabilan Nyquist adalah : Jika L(s) adalah fungsi transfer dari lup
untuk sistem berumpan balik negatif dan tidak memiliki pole pada bagian sebelah
kanan bidang kompleks (Re s ≥ 0 ) maka sistem lup terttup akan stabil jika dan hanya
jika kontur tertutup yang diberikan oleh
Ω = {L( jω ) : −∞ < ω < ∞} ⊂ C tidak
mengelilingi s =-1.
II.4. Diagram Logaritmik atau grafik Bode
Fungsi alih sinusoida dapat dinyatakan dalam dua diagram terpisah , satu
merupakan diagram besar terhadap frekuesin dan yang satunya lagi adalah diagram
sudut fasa terhadap ferkuensi. Diagram Bode terdiri dari dua buah grafik; satu
merupakan diagram dari logaritma besar fungsi alih sinusoida; satu merupakan
diagram sudut fasa ; keduanya digambar terhadap frekuensi dalam skala logaritmik.
Dala metode pembentukan lup diagram Bode digunakan untuk menentukan besar dari
fungsi alih sinusoida dari fungsi alih, dan frekuensi crossover (ω gc ) dari fungsi alih
tersebut. Frekuensi crossover adalah frekuensi yag menyebabkan besar fungsi alih lup
terbuka sama dengan satu.
Universitas Sumatera Utara
II.5 Kontroller PID
Kontroler adalah komponen yang berfungsi meminimalisasi sinyal kesalahan.
Tipe kontroler yang paling banyak digunakan adalah controller PID. Elemen kontroler
P,I dan D masing-masing secara keseluruhan bertujuan untuk mendeteksi sinyal
kesalahan penggerak, mempercepat reaksi sistem dan menghasilkan perubahan awal
yang lain.
II.5.1 Kontroler Proporsional
Kontroler proporsional memiliki keluaran yang sebanding (proporsional)
dengan besarnya sinyal kesalahan, jika sinyal masukan dimisalkan sebagai m(t) dan
sinyal keluaran sebagai e(t) maka untuk kontroler proporsional, hubungan antara
keluaran kontroler m(t) dan sinyal kesalahan penggerak e(t) adalah
m(t ) = K p e(t )
…(2.3)
Atau dalam besaran transformasi laplace,
M (s)
= Kp
E (s)
…(2.4)
Dimana K p adalah kepekaan proporsional atau penguatan. Perubahan pada
kontroler proporsional akan mengakibatkan sistem secara langsung
mengubah
keluarannya sebesar konstanta pengalinya.
II.5.2 Kontroler Integral
Kontroler integral berfungsi untuk menghasilkan sistem yang memiliki
kesalahan keadaan tunak yang kecil. Kalau sebuah plant tidak memiliki elemen
integrator (1/s), maka kontroler proporsional tidak dapat menjamin keluaran sistem
dengan kesalahan keadaan tunak yang kecil. Kontroler integral berfungsi untuk
memperbaiki respon sistem.
Universitas Sumatera Utara
Kontroler ini dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal
kesalahan. Keluaran kontroler ini merupakan penjumlahan yang terus menerus dari
perubahan masukannya.
Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga
keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran kontroler
integral merupakan luas bidang yang dibentuk oleh kurva kesalahan penggerak
Kontroler integral mempunyai karakteristik sebagai berikut:
1. Dapat
menghilangkan error steady state, namun keluaran kontroler
membutuhkan selang waktu tertentu, sehingga respon sistem akan menjadi
lambat
2. Apabila sinyal kesalahan bernilai nol maka keluaran kontroler akan tetap
bertahan pada nilai sebelumnya
3. Jika sinyal kesalahan tidak berharga nol, maka keluaran akan menunjukkan
perubahan (kenaikan atau penurunan) yang dipengaruhi oleh besarnya nilai
kesalahan dan nilai K i .
II.5.3 Kontroler diferensial
Kontroler diferensial mempunyai sifat seperti suatu operasi derivative.
Perubahan yang sesaat pada masukan kontroler akan mengakibatkan perubahan yang
sangat besar dan cepat.
+
E(s)
TdS
M(s)
Gambar 2.5 Kontroler diferensial
Universitas Sumatera Utara
Kontroler diferensial biasanya digunakan untuk mempercepat respon awal
system, tetapi tidak memperkecil kesalahan tunaknya (steady state error).
Adapun karakteristik dari suatu kontroler diferensial adalah:
1. Kontroler diferensial memberikan efek redaman pada sistem yang
berosilasi dan memperbaiki respon transient.
2. Jika sinyal kesalahan (error) berubah terhadap waktu, maka keluaran yang
dihasilkan kontroler tergantung pada nilai Td dan laju perubahan sinyal
kesalahan.
3. Kontroler diferensial mempunyai karakter untuk saling mendahului,
sehingga kontroler ini dapat menghasilkan koreksi yang signifikan sebelum
pembangkit kesalahan menjadi sangat besar. Oleh sebab itu kontroler
diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi
yang bersifat korektif, sehingga sistem akan menjadi stabil.
II.6.Metode pembentukan lup PID (loop shaping PID)
Metode pembentukan lup adalah suatu metoda yang berdasarkan analisis
Nyquist. Dengan menggunakan kriteria kestabilan Nyquist kita memplot Nyquist
fungsi alih lup terbuka untuk menentukan kestabilan sistem lup tertutup. Metode ini
bertujuan untuk mencari nilai penguatan kontroler yang paling tepat dari fungsi alih
lup terbuka dengan menganalisa fungsi alih L( jω ) lup terbuka sistem tersebut.
Ada tiga kombinasi kontroler (Proporsional, Integral, Diferensial) yaitu
kontroler proporsional plus integral (PI), kontroler proporsional plus diferensial (PD),
dan kontroler proporsional plus integral plus diferensial (PID). Bentuk fungsi alih dari
masing-masing kombinasi kontroler tersebut adalah sebagai berikut :
Universitas Sumatera Utara
II.6.1 Kontroler Proporsional Plus Integral
Kontroler proporsional plus integral didefenisikan dengan persamaan berikut
ini :
C (t ) = K p e(t ) +
Kp t
Ti
∫ e(t )dt
…(2.5)
0
dengan mentransformasikan laplace maka persamaan diatas akan menjadi :
C ( s) = K p +
Kp
…(2.6)
Ti s
Jika fungsi alih adalah L(s)=P(s)C(s) dan frekuensi crossover gain adalah ω gc maka
fungsi alih L(s) dapat dituliskan dalam bentuk :
L( jω ) = P ( jω )C ( jω )
L ( jω ) =
kP( jω ) 1 + ω gc 2Ti 2
…(2.7)
ω gcTi
nilai konstanta penguatan proporsional dapat dihitung dengan menggunakan
persamaan :
Kp =
(
1 + ω gc 2Ti 2
ω gcTi
(
)
| P jω gc |
…(2.8)
)
nilai dari | P jω gc | dan ω gc dapat dilihat secara langsung dari plot Bode . Satusatunya nilai variabel yang tidak diketahui dari pesamaan 2.8 adalah konstanta waktu
integral Ti . Nilai konstanta ini dapat ditentukan dengan menggunakan persyaratan
margin fasa yang digunakan pada perancangan Hubungan antara ωTi = cos ϕ m .
Biasanya nilai margin fasa dimana sistem akan stabil berkisar antara harga 30 o − 60 o .
Universitas Sumatera Utara
II.6.2 Kontroler Proporsional Plus Diferensial
Dengan menggunakan diagram bode yang sama nilai penguatan K p dapat ditentukan
dari persamaan yang mendefenisikan hubungan antara kontroler proporsional dan
diferensial yang dinyatakan sebagai:
C (t ) = K p + K p Td
de(t )
dt
...(2.9)
dengan mentrasformasi lapalace persamaan diatas maka :
C ( s ) = K p (1 + Td s )
...(2.10)
karena fungsi alih adalah L(s)=P(s)C(s) dan frekuensi crossover gain adalah
ω gc maka fungsi alih L(s) dapat dituliskan dalam bentuk :
L( jω ) = P ( jω )C ( jω )
L( jω ) = K p P ( jω ) 1 + ω gc 2Td 2
…(2.11)
nilai konstanta K p dapat ditentukan dengan menggunakan persamaan :
K p =| P( jω ) | 1 + ω gc 2Td 2
…(2.12)
sama seperti pada kontroler PI (Proporsional,Integral) nilai konstanta waktu Td dapat
ditentukan dari
hubungan ωTd = sin ϕ m margin fasa yang dipilih pada saat
(
)
perancangan. Sementara nilai dari | P jω gc | dan ω gc dapat dilihat secara langsung
dari plot Bode.
Universitas Sumatera Utara
II.6.3 Kontroler Proporsional Plus Integral Plus Diferensial.
Perancangan dari kontroler proporsional plus integral plus diferensial sangat
banyak digunakan untuk menutupi kekurangan serta menggabungkan kelebihan dari
masing-masing kontroler.
Dengan menggabungkannya maka elemen-elemen kontroler P, I, dan D akan
mempercepat reaksi sebuah sistem. Dengan e(t) adalah sinyal masukan kontroler
sedangkan m(t) adalah sinyal keluarannya maka secara matematis dapat dituliskan
sebagai berikut:
t
C (t ) = K p e(t ) + K i ∫ e(t )dt + K D
0
de(t )
dt
…(2.13)
Dengan mentransformasi laplace persamaan diatas maka persamaan 2.13 menjadi:
1
C ( s ) = K p 1 +
+ Td s
Ti s
T s + Ti sTd s + 1
C ( s ) = K p i
Ti s
Ti s + Ti Td s 2 + 1
C ( s) = K p
T
s
i
…(2.14)
Konstanta penguatan K p dapat dicari dengan menggunakan hubungan antara
L( jω ) = P( jω )C ( jω ) sehigga:
ω 2T 2 − T 2T 2ω 4 + 1
gc i
i d
gc
L( jω ) = P( jω )C ( jω ) = K p
P( jω gc ) …(2.15)
ω gcTi
Universitas Sumatera Utara
Maka nilai konstanta penguatan K p adalah :
ω 2T 2 − T 2T 2ω 4 + 1
gc i
i d
gc
Kp =
| P( jω gc ) |
ω gcTi
…(2.16)
nilai konstanta waktu Ti dan Td didapat dari kombinasi masing-masing kontroler PI
dan PD. Pada metoda pembentukan lup nilai konstanta penguatan K p akan berubah
sesuai dengan kombinasi kontroler yang digunakan. Akan tetapi nilai K i dan K d
tidak dapat dihitung secara langsung seperti pada kontroler PI dan PD, melainkan
melalui hubungan :
log K d = log K p T d − log 10
log K i = log
Kp
Ti
− log 10
…(2.17)
…(2.18)
Universitas Sumatera Utara