sistem pengatur lampu pejalan kaki portable
advertisement

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
TUGAS AKHIR
SISTEM PENGATUR LAMPU PEJALAN KAKI
PORTABLE DENGAN SUMBER ENERGI MANDIRI
disusun oleh :
ANDITA PRASTITI.
NIM : 125114014
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2016
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
FINAL PROJECT
PEDESTRIAN LIGHTING CONTROL SYSTEM WITH
A PORTABLE SELF-CONTAINED ENERGY SOURCE
disusun oleh :
ANDITA PRASTITI.
NIM : 125114014
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2016
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
HALAMAN PERSETUruA}I
TUGAS AKHIR
SISTEM PENGATUR LAMPU PF^IALAI\T KAKI PORTABLE
DENGAFT SITMBpR EI\IERGr MANIIIRI
(pErlEsTRrAN LrGnrrNG CONTROL SYSTEM WrrH A
Pembimbing
ill
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
.
HALAMANPENGESAHAN
TUGAS AKT{IR
SISTEM PENGATUR LAMPU PEJALAI\I KAKI PORTABLE
DENGAI\T ST'MBER EI\TERGI MANDTRI
SEDESTRTAN LrGrrTrNG CONTROL SYSTEM WTrfl A
PORTABLE SELT.CONTAII\IED ENERGY SOI}RCE)
Disusun oleh:
TandaTangam
Kefira
Setrretaris
Anggota
: Peilrus Setyo Prabowo,
S-T-M.T.
z
Yogyakarta,
flguilt*r 2ot6
Fakultas Sains dan Teknologi
Universitas Sanata Dharma
S.Si,, M. Math. Sc., Ph. D
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
PSRNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir
ini tidak memuat karya
atau bagian karya orang lair, kecuali yang telah disebutkan dalam kutipan dan daftar
pustaka sebagaimana layaknya karya ihni@.
Yogyakarta,
1l Juli
2016
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO :
Dengan keyakinan kamu dapat memiliki apa yang kamu
inginkan!
Dengan ini kupersembahkan karyaku untuk …..
Tuhan Yesus Kristus sang juru selamatku,
Ibu, Yangti, Yangde, Alm. Yangkung dan keluargaku tercinta,
Mas FX. Dwicahyo Rianto Putro yang selalu setia menemaniku,
Sahabat – sahabatku yang selalu menghiburku,
Teman-teman seperjuanganku Teknik Elektro 2012,
Dan semua orang yang hadir didalam kehidupanku
vi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
LEMBAR PERNYATAN PERSETUJUAN PUBLIKASI
KARYA ILMIAH UNTUK KEPENTINGAN
AI(ADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma
Nama
Nomor
Demi
:
: Andita Prastiti
Mahasiswa
pengembangan
ilmu
:125114014
pengetahuan, saya memberikan kepada perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul
:
SISTEM PENGATUR LAMPU PEJALAN KAKI PORTABLE
DENGAN SUMBER ENERGI MANDIRI
beserta perangkat yang diperlukan ( bila ada ). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas dan mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta
ijin dari saya maupun memberikan royalty kepada
mencatumkan nama saya sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Yogyakarta, 11 JuIi 2016
(Andita Prastiti.)
vil
saya selama tetap
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
INTISARI
Setiap tahun jumlah penduduk di Indonesia semakin meningkat, dan kebutuhan
akan kendaraan ikut meningkat. Peningkatan jumlah kendaraan mengakibatkan kepadatan
yang terjadi pada setiap ruas jalan Hal tersebut menimbulkan kesulitan bagi para pejalan
kaki yang hendak menyebrang jalan. Dengan kemajuan teknologi di masa kini sudah
banyak lampu lalu lintas yang menggunakan solar cell atau sumber energi mandiri. Maka
dengan kedua ide tersebut dirancang sebuah sistem pengatur lampu pejalan kaki portable
dengan sumber energi mandiri.
Sistem pengatur dikendalikan oleh sensor pendeteksi kehadiran orang (pejalan
kaki) menggunakan sensor infrared. Tegangan supply untuk sistem pengatur didapatkan
dari solar cell dan accu. Sensor pendeteksi orang akan mendeteksi kehadiran pejalan kaki
yang akan menyebrang jalan, dan sistem akan mengatur waktu untuk pengoperasian dan
pengaktifan lampu pejalan kaki dan APILL.
Pendeteksi kehadiran orang sudah berjalan dengan baik, ketika ada dan tidak ada
orang sensor infrared sudah dapat mendeteksi. Output dari sensor sudah dapat
mengoperasikan lampu pejalan kaki dan lampu APILL dengan waktu yang telah
ditentukan dalam program utama. Panel surya juga dapat terus menyuplai tegangan untuk
sistem pengatur dan mengisi accu yang kosong. Dengan kapasitas total 10 WP solar cell
mampu untuk mengisi accu saat pagi sampai sore hari, selama 6 jam minimal (mengisisi
accu setengah kosong). Dengan percobaan sebanyak 7 kali sistem dapat bekerja sesuai
dengan perancangan program sebanyak 5 kali percobaan. Sedangkan percobaan supply
dengan panel surya dari 5 kali percobaan berhasil menyuplai sistem keseluruhan sebanyak
3 kali percobaan. Sistem sudah bekerja secara maksimal dengan tingkat keberhasilan
sebesar 71 %.
Kata kunci : solar cell, sensor infrared, portable.
viii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
ABSTRACT
Every year the population of Indonesia is increasing, and the need for vehicles to
increase. The increase in the number of vehicles resulted in density that occurs on every
street It creates difficulties for pedestrians who want to cross the street. With the
advancement of technology today is already a lot of traffic lights that use solar cell or an
independent energy sources. So with these two ideas designed a control system with
pedestrian lights portable energy source independently.
The system is controlled by sensors detecting the presence of the (pedestrian) use
infrared sensors. The voltage supply for the control system obtained from the solar cell and
batteries. Detection sensor will detect the presence of pedestrians to be crossing the street,
and the system will set the time for the operation and activation of pedestrian lights and
APILL.
Detection of the presence of people are going well, when there is and no one was
able to detect infrared sensor. The output of the sensor has been able to operate the
pedestrian lights and lamps APILL with a predetermined time in the main program. The
solar panels can also continue to supply voltage for the control system and charge the
batteries are empty. With a total capacity of 10 WP solar cell able to charge the batteries
when the morning until late in the evening, for 6 hours minimum (fill the accu). With the
trial as much as 7 times the system can work in accordance with the design of the program
as much as 5 times the experiment . While trial supply with solar panels of five trials
successfully supply the whole system as much as three times the experiment . The system
is already working optimally with a success rate of 71%
Keywords: solar cells, infrared sensors, portable.
ix
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus karena atas segala
rahmat-Nya sehingga penulis dapat menyelesaikan laporan tugas akhir ini dengan baik.
Laporan tugas akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana.
Selama pembuatan tugas akhir ini penulis menyadari bahwa begitu banyak pihak
yang memberikan bantuan baik berupa idea tau gagasan, dukungan moral, maupun bantuan
materi. Oleh karena itu, peneliti ingin mengucapkan terimakasih kepada :
1. Drs. Johanes Eka Priyatma, M.Sc., Ph.D, Rektor Universitas Sanata Dharma
2. Sudi Mungkasi, S.Si., M. Math. Sc., Ph. D, Dekan Fakultas Sains dan
Teknologi
3. Petrus Setyo Prabowo, S.T., M.T., Ketua Program Studi Teknik Elektro
Universitas Sanata Dharma.
4. Dr. Iswanjono, dosen pembimbing yang dengan penuh setia, kesabaran dan
pengertian untuk membimbing dalam menyelesaikan Tugas Akhir ini.
5. Djoko Untoro Suwarno, S.Si.,M.T. dan Petrus Setyo Prabowo, S.T., M.T.
selaku dosen penguji yang telah memberi masukkan, kritik dan saran serta
merevisi penulisan tugas akhir ini.
6. Seluruh dosen yang telah mengajarkan banyak ilmu yang bermanfaat selama
menempuh pendidikan di Universitas Sanata Dharma.
7. Keluarga penulis terutama Ibu penulis, Yangti, Yangde, alm. Yangkung, Ayah,
Bapak dan kedua adikku (Andika Prayoga dan Michael Daniswara Pratomo)
yang telah banyak memberikan dukungan doa, kasih sayang dan motivasi
selama menempuh pendidikan di Universitas Sanata Dharma.
8. Mas Fransiscus Xaverius Dwicahyo Rianto Putro kekasihku yang selalu setia
untuk menemani dan mendukung selama penulisan tugas akhir ini.
9. Keluarga besarku yang telah memberi dukungan selama menempuh pendidikan
di Universitas Sanata Dharma.
10. Sahabat – sahabatku : Cindy Jonatan, Stepani Elsa, Luluk Ariyanto, Sambu
Rezpatia, Dirga, Ivana Nydya Clarissa Sitohang, Fransisca Putri, Elizabeth
Nada, Stacia Elvaretta, Namiera Yushendea, Bernadette Andika.G., Maria
Materdei Ayu, Adhi Christian, Yunita Maria Ndoi, Malvin Choco, Maria
x
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Angelika Suhadi, Nanda Ayu Pujiningtyas, dan Santayana Pangaribuan yang
selalu ada untuk membantuku, menyemangatiku dan menghiburku.
11. Teman
-
teman seperjuangan Teknik Elektro 2012 yangtelah menemani pada
saat menempuh pendidikan di Universitas Sanata Dhama'
12. Semua
pihak yang tidak bisa disebutkan satu persatu yang telah banyak
memberikan banyak bantuan dan dukungan dalam menyelesaikan tugas akhir
ini.
Penulis menyadari bahwa dalam pen)rusunan tugas akhir masih memiliki
kekurangan. Oleh karena itu, penulis mengharapkan masukan, kritik dan saran yang
membangun agar tugas akhir
ini
menjadi lebih baik. Semoga tugas akhir
bermanfaat sebagaimana mestinya
Yogyakarta, 1l Juli 2016
Penulis,
@
Andita Prastiti.
xl
ini
dapat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
DAFTAR ISI
HALAMAN JUDUL (Bahasa Indonesia) .......................................................................i
HALAMAN JUDUL (Bahasa Inggris)
......................................................................ii
HALAMAN PERSETUJUAN
.................................................................................iii
HALAMAN PENGESAHAN
.................................................................................iv
PERNYATAAN KEASLIAN KARYA
......................................................................v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP .............................................vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS
INTISARI
............................................vii
...................................................................................................................viii
ABSTRACT .....................................................................................................................ix
KATA PENGANTAR
..............................................................................................x
DAFTAR ISI ....................................................................................................................xii
DAFTAR GAMBAR .......................................................................................................xvi
DAFTAR TABEL
........................................................................................................xx
BAB I PENDAHULUAN
..............................................................................................1
1.1.
Latar Belakang.........................................................................................................1
1.2.
Tujuan dan Manfaat.................................................................................................2
1.3.
Batasan Masalah.......................................................................................................3
1.4.
Metodologi Penelitian ............................................................................................4
BAB II DASAR TEORI
2.1.
2.2.
Solar Cell
...............................................................................................6
...........................................................................................................6
2.1.1. Solar Charge Controller
.....................................................................11
2.1.2. Baterai (Accumulator)
.....................................................................13
Mikrokontroler Arduino UNO
.....................................................................15
xii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
2.3.
Traffic Light ..........................................................................................................17
2.3.1. LED (Light Emitting Diode) ......................................................................17
2.4.
EMS RF Transceiver ..............................................................................................20
2.4.1. Modulasi Digital
..................................................................................22
2.4.2. Modulasi FSK (Frequency Shift Keying)
..............................................23
2.4.3. Demodulasi FSK (Frequency Shift Keying) ..............................................24
2.4.4. SPI (Serial Peripheral Interface)
..........................................................25
2.5.
Sensor Infrared
..............................................................................................27
2.6.
Register Geser (Shift register)
2.7.
Darlington Transistor Arrays (uln2803)
2.8.
Buzzer ......................................................................................................................36
2.9.
Push Button
......................................................................30
..........................................................33
..........................................................................................................37
BAB III RANCANGAN PENELITIAN
......................................................................40
3.1.
Konsep Dasar ..........................................................................................................40
3.2.
Perancangan Software Sistem Pengatur Lampu Pejalan Kaki Portable dengan
Sumber Energi Mandiri.
.................................................................................41
3.2.1. Diagram alir subrutin baca status atau statement pada slave .....................42
3.2.2. Diagram alir subrutin setting sensor orang (sensor infrared) .....................42
3.2.3. Format Paket Data
3.3.
.................................................................................46
Peracangan Hardware Sistem Pengatur Lampu Pejalan Kaki
3.3.1. Solar cell
.....................48
.............................................................................................48
3.3.2. Rangkaian sensor infrared
.....................................................................49
3.3.3. Embedded Module Serial RF Transceiver Shield
xiii
.................................50
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
3.3.4. Mikrokontroler
...............................................................................51
3.3.5. Perancangan LED Traffic Light dan Lampu Pejalan Kaki Portable .......53
3.3.6. Rangkaian Push Button
...................................................................59
3.3.7. Rangkaian Buzzer Sebagai Indikator .......................................................60
BAB IV HASIL DAN PEMBAHASAN
4.1.
...................................................................61
ImplementasiLampu Pejalan Kaki Portable .......................................................61
4.1.1. Bentuk Fisik dan Konsep Kerja Lampu Pejalan Kaki Portable ...............61
4.2.
Pengujian Panels Surya (Solar cell) ...................................................................66
4.2.1. Pengujian Solar Cell Tanpa Beban (open-circuit)
...............................66
4.2.2. Pengujian Solar cell dengan Beban (optimum operating)
4.3.
Pengujian Alat
...................67
...........................................................................................69
4.3.1. Pengujian Sensor Infrared
...................................................................69
4.3.2. Pengujian Rangkaian Shift Register
.......................................................72
4.3.3. Pengujian Rangkaian Driver
...................................................................72
4.3.4. Pengujian Rangkaian LED
...................................................................72
4.4.
Pengujian Accumulator
4.5.
Pengujian Sistem Pengatur Solar Cell
4.6.
Pembahasan Perangkat Lunak
4.6.1. Inisialisasi
...............................................................................73
.......................................................73
...................................................................75
...........................................................................................75
4.6.2. Program Utama
...............................................................................76
4.6.3. Subrutin Pengiriman Paket data
.......................................................77
4.6.4. Subrutin Sensor Infrared (Sensor Pendeteksi Orang) ...............................78
xiv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB V KESIMPULAN DAN SARAN
...................................................................79
5.1.
Kesimpulan
.......................................................................................................79
5.2.
Saran ...................................................................................................................79
DAFTAR PUSTAKA .....................................................................................................80
LAMPIRAN ....................................................................................................................82
xv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
DAFTAR GAMBAR
Gambar 1.1.
Blok Diagram Seluruh Sistem Secara Umum ................................4
Gambar 2.1.(a).
Sistem Kerja Dalam Solar Cell .....................................................7
Gambar 2.1.(b).
Bentuk Fisik Solar Cell .................................................................7
Gambar 2.2.
Kurva Karakteristik V-I .................................................................9
Gambar 2.3.
Contoh Rangkaian Schematic Solar Charge Controller Serial.....12
Gambar 2.4.
Bentuk Fisik Solar Charge Controller Tipe PWM ......................12
Gambar 2.5.
Mikro Atmega328P-PU ................................................................16
Gambar 2.6.
Bentuk Fisik Dari Mikrokontroler Arduino UNO ........................17
Gambar 2.7.
Simbol LED dan Bentuk Fisik LED .............................................18
Gambar 2.8.
Konfigurasi Pin RFM12-433S ......................................................21
Gambar 2.9.
EMS RF Transceiver ....................................................................22
Gambar 2.10.
Jenis – Jenis Modulasi Digital ......................................................23
Gambar 2.11.
Teknik Modulasi FSK (Frequency Shift Keying) ..........................24
Gambar 2.12.
Teknik demodulasi FSK (Frequency Shift Keying) ......................24
Gambar 2.13.(a)
SPI Bus ..........................................................................................26
Gambar 2.13.(b)
Master-slave Interconnection ........................................................26
Gambar 2.14.
Bentuk Sinyal Infrared yang Ditransmisikan ................................28
Gambar 2.15.(a)
Modul DT-I/O Infrared Transmitter .............................................28
Gambar 2.15.(b)
Modul DT-I/O Infrared Receiver ..................................................28
Gambar 2.16.
Pergeseran data Pada Register Geser ............................................31
xvi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Gambar 2.17.
Contoh register Geser Kanan ..........................................................31
Gambar 2.18.
Contoh Register Geser Kiri .............................................................32
Gambar 2.19.
IC 74HC595 (IC Shift Register) .....................................................32
Gambar 2.20.
Rangkaian Transistor Darlington (Pasangan Transistor NPN) .......33
Gambar 2.21.
Konfigurasi Pin IC uln2803 (darlington transistor arrays) ............34
Gambar 2.22.
Rangkaian IC driver uln2803 ..........................................................34
Gambar 2.23.
Bentuk Fisik IC uln2803 .................................................................35
Gambar 2.24.
Simbol Buzzer .................................................................................36
Gambar 2.25.
Contoh Buzzer .................................................................................36
Gambar 2.26.
Rangakaian anti-bouncing push button ...........................................37
Gambar 2.27.(a)
Simbol push button Normally open dan Normally close ................38
Gambar 2.27.(b)
Bentuk Fisik push button ...............................................................38
Gambar 2.28.
Rangkaian switch/push button pull-up ...........................................39
Gambar 2.29.
Rangkaian switch.push button pull-down ......................................39
Gambar 3.1.
Perancangan Sistem Pengatur Lampu Pejalan
Kaki Portable ................................................................................40
Gambar 3.2.
Diagram alir utama (master). ........................................................43
Gambar 3.3.
Diagram alir subrutin pada slave. .................................................44
Gambar 3.4.
Diagram alir subrutin setting sensor orang ...................................45
Gambar 3.5.
Rangkaian schematic mikrokontroler dengan sensor infrared RX
dan TX. ..........................................................................................49
Gambar 3.6.
Rangkaian schematic mikrokontroler dengan modul EMS RF
Transceiver. ...................................................................................50
xvii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Gambar 3.7.
Rangkaian schematic minimum system mikrokontroler ..................52
Gambar 3.8.
Rangkaian schematic IC 74HC595 dan IC uln2803 .......................54
Gambar 3.9.
Rangkaian LED dan resistor Lampu lalu Lintas ............................55
Gambar 3.10.
Rangkaian LED dan resistor Lampu Pejalan Kaki..........................55
Gambar 3.11.
Desain 3D lampu pejalan kaki portable .........................................56
Gambar 3.12.
Desain 3D box prototype (bawah) .................................................56
Gambar 3.13.
Desain 3D penyanggah box lampu (atas) ......................................57
Gambar 3.14.
Desain 3D box lampu (atas) ..........................................................57
Gambar 3.15.
Desain 3D Sistem pengatur lampu pejalan kaki portable (tampak
kanan). ...........................................................................................58
Gambar 3.16.
Desain 3D Sistem pengatur lampu pejalan kaki portable
(tampak kiri). .................................................................................58
Gambar 3.17.
Rangkaian anti-bouncing push button ...........................................59
Gambar 3.18.
Rangkaian buzzer ...........................................................................60
Gambar 4.1.
Lampu Pejalan Kaki Portable dengan Sumber Energi Mandiri
Secara Keseluruhan. .......................................................................61
Gambar 4.2.(a)
Bagian Box Lampu Pejalan Kaki dan APILL (LED) ....................62
Gambar 4.2.(b)
Bagian Tiang Penyangga ................................................................62
Gambar 4.2.(c)
Bagian Penyangga Bawah (Tempat Box Sistem Pengatur) ............62
Gambar 4.3
Gambar Rangkaian LED Lampu (tampak atas dan
tampak samping). ...........................................................................63
Gambar 4.4.
Rangkaian Selektor .........................................................................63
Gambar 4.5.
Rangkaian Driver dan SIPO (tampak atas dan tampak
xviii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
samping). .......................................................................................64
Gambar 4.6.
Rangkaian Minimum System .........................................................65
Gambar 4.7.
Grafik Tegangan Output Panel Surya Terhadap Waktu
(open-circuit). ..............................................................................66
Gambar 4.8.
Grafik Tegangan Output Panel Surya Terhadap Waktu. .............68
xix
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
DAFTAR TABEL
Tabel 2.1.
Spesifikasi solar cell kapasitas 10 Wp. ......................................................11
Tabel 2.2.
Tabel state of charge standard batteries ....................................................15
Tabel 2.3
Fungsi port – port dalam mikrokontroler Arduino UNO ...........................16
Tabel 2.4.
Tabel senyawa semikonduktor perbedaan warna pad LED .......................18
Tabel 2.5.
Perbedaan Tegangan LED untuk Setiap Warna ..........................................19
Tabel 2.6.
Tabel fungsi pin pada RFM12-433S ...........................................................21
Tabel 2.7.
Fungsi setiap pin atau port pada IC uln2803 ..............................................34
Tabel 2.8.
Spesifikasi IC uln2803 ................................................................................35
Tabel 3.1.
Format data master ......................................................................................46
Tabel 3.2.
Simbol karakter data ....................................................................................46
Tabel 3.3.
Format data slave .........................................................................................47
Tabel 3.4.
Simbol data .................................................................................................47
Tabel 3.5.
Tabel pembagian pin / port dalam mikrokontroler .....................................51
Tabel 4.1.
Tabel Pengujian Sensor Infrared atau Sensor Pendeteksi Pejalan kaki ......69
Tabel 4.2.
Tabel Pengujian Sistem Pengatur (Lampu APILL) ....................................74
Tabel 4.3.
Tabel Pengujian Sistem Pengatur (Lampu Pejalan Kaki) ...........................74
xx
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB I
PENDAHULUAN
1.1.
Latar Belakang Masalah
Setiap tahun jumlah penduduk di Indonesia semakin meningkat, dan kebutuhan
akan kendaraan ikut meningkat. Peningkatan jumlah kendaraan mengakibatkan kepadatan
yang terjadi pada setiap ruas jalan. Kepadatan pada setiap ruas jalan memiliki tingkat
kepadatan
yang
berbeda.
Masalah
kepadatan
tersebut
akan
mengakibatkan
ketidaknyamanan yang dirasakan oleh para masyarakat (terutama para pejalan kaki).
Pejalan kaki mengalami kesulitan ketika menyebrang jalan saat terjadi kepadatan
kemudian tidak ada satupun kendaraan yang memberikan kesempatan pejalan kaki untuk
menyebrang jalan. Salah satu faktor penyebab terjadinya hal tersebut adalah karena tidak
ada lampu pengatur lalu lintas kendaraan yang terletak di jalan lurus 2 arah dan mengatur
laju kendaraan ketika akan ada pejalan kaki yang menyebrang jalan.
Masalah di atas dapat diatasi dengan pengaturan sistem lampu lalu lintas (pada
jalan lurus 2 arah) untuk kendaraan dan pejalan kaki. Lampu Lalu Lintas dibutuhkan untuk
membantu mengatur kepadatan yang terjadi pada setiap ruas jalan di Indonesia.
Masyarakat (pejalan kaki terutama) yang ingin menyebrang juga dapat terbantu dengan
adanya lampu lalu lintas, karena mereka dapat menyebrang jalan dengan nyaman dan
aman. Dalam UU No. 22/2009 tentang Lampu Lalu Lintas dan Angkutan Jalan, Lampu
Lalu Lintas disebut sebagai alat pemberi isyarat lalu lintas (APILL). APILL adalah lampu
yang mengendalikan arus lalu lintas yang terpasang di persimpangan jalan, tempat
penyebrangan pejalan kaki (zebra cross), dan tempat arus lalu lintas lainnya[1].
Zaman sekarang perkembangan teknologi semakin banyak, antara lain sistem
mandiri (Solar Cell). Solar Cell
merupakan sistem pembangkit listrik mandiri yang
memanfaatkan tenaga surya sebagai sumber utama. Sel Surya (solar Cell) adalah alat
untuk mengkonversi atau mengubah energi surya menjadi energi listrik. Sistem Panel
Surya membutuhkan MPPT (Max Power Point Tracker) untuk memaksimalkan energi
surya yang akan dipergunakan untuk pembangkit energi listrik[2]. Solar Cell banyak
diaplikasikan pada penggunaan lampu – lampu untuk penerangan di beberapa ruas jalan
tol. Perkembangan solar cell lainnya yaitu penggunaan pada beberapa lampu lalu lintas di
1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
2
persimpangan jalan (lampu lalu lintas atau APILL). Sistem mandiri ini juga memiliki
keterbatasan yaitu intensitas sinar matahari yang tidak tetap. Maka itu Solar Cell dapat
dibantu oleh Accumulator (accu) supaya energi listrik yang dihasilkan pada pagi dan siang
hari juga dapat tersimpan selain dipergunakan untuk kebutuhan penerangan.
Penulis menemukan beberapa jurnal tentang penelitian lampu lalu lintas, dan sistem
pengaturannya. Salah satu yang menarik penulis adalah jurnal tugas akhir yang berjudul
Rancang Bangun Prototipe Pengatur Lampu Lalu Lintas Memanfaatkan Sensor Tekan[3].
Pada jurnal tugas akhir tersebut Prototipe Lampu Lalu Lintas dirancang dengan sensor
tekan sebagai pengendali waktu (lama nyala lampu lalu lintas) secara otomatis sesuai
dengan jumlah kepadatan yang terjadi. Dari referensi tersebut penulis memiliki ide untuk
mengembangkan dengan judul “Sistem Pengatur Lampu Pejalan Kaki Portable dengan
Sumber Energi Mandiri“. Sistem pengaturan pejalan kaki ini menggunakan sumber energi
mandiri atau Solar Cell dan dibantu dengan Solar Charger tipe PWM, serta sensor infrared
sebagai pendeteksi kehadiran orang saat ingin menyebrang jalan (jalan lurus 2 arah).
Lampu penyebrangan untuk pejalan kaki mendapatkan sumber listrik dari solar cell
langsung (dibantu solar charger tipe PWM), dan dari accu. Lampu penyebrangan untuk
pejalan kaki diatur dengan sensor infrared yang mendeteksi kehadiran orang, kemudian
output dari sensor infrared tersebut akan masuk ke dalam mikro dan mengatur waktu nyala
lampu penyebrangan untuk pejalan kaki.
1.2.
Tujuan dan Manfaat
Skripsi ini bertujuan untuk
:
1. Menghasilkan prototipe lampu lalu lintas dan lampu penyebrangan untuk pejalan
kaki (portable) dengan sumber energi mandiri yaitu Solar Cell.
Manfaat yang diharapkan dari penulisan skripsi ini adalah :
1. Membantu manajemen lalu lintas khususnya untuk pejalan kaki dalam hal
menyebrang jalan (2 arah).
2. Dapat menjadi acuan dalam penelitian dan perkembangan dalam sistem pengaturan
lampu lalu lintas atau pejalan kaki dengan sumber energi mandiri dan input sensor
lainnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
3
1.3.
Batasan Masalah
Agar Tugas Akhir ini dapat mengarah pada tujuan dan untuk menghindari terlalu
kompleksnya permasalahan yang muncul, maka perlu adanya batasan – batasan masalah
yang sesuai dengan judul dari tugas akhir ini. Adapun batasan masalah, yaitu
:
1. Menggunakan Solar Cell dan Accumulator sebagai sumber energi dari lampu
pejalan kaki tersebut.
2. Sensor yang digunakan adalah sensor infrared yang terdiri dari Tx (pemancar) dan
Rx (penerima) sebagai pendeteksi kehadiran orang (pejalan kaki).
3. Menggunakan Mikrokontroler buatan sendiri yang compatible dengan arduino.
4. Komunikasi antara lampu pejalan kaki satu dengan lainnya menggunakan EMS RF
Transceiver dengan frekuensi 433 MHz (komunikasi menggunakan gelombang
radio).
5. LED yang digunakan untuk lampu pejalan kaki (dan lampu lalu lintas) berwarna
merah dan hijau dengan spesifikasi super bright dan berukuran 10 mili.
6. Driver untuk LED menggunakan IC (Integrated Circuit) dengan seri uln 2803.
7. Sebagai selektor dalam pengaturan nyala lampu pejalan kaki digunakan Integrated
Circuit (IC) dengan seri 74HC595.
8. Terdapat push button pada prototip sebagai pengatur ketika terjadi error pada
sensor infrared.
9. Sistem pengaturan lampu lalu lintas (untuk kendaraan) dan penyebrangan pejalan
kaki pada jalan lurus 2 arah (bukan persimpangan).
10. Pengaturan nyala lampu dari posisi warna merah ke hijau pada lampu pejalan kaki,
berdasarkan sela waktu (delay time) yang telah ditentukan.
11. Pengaturan nyala lampu dari posisi warna hijau kembali ke warna merah pada
lampu pejalan kaki, berdasarkan hasil hitungan jumlah orang (pejalan kaki) yang
menyeberang.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
4
1.4.
Metodologi Penelitian
Berdasarkan pada tujuan yang ingin dicapai metode – metode yang digunakan
dalam penyusunan tugas akhir ini adalah
1.
:
Studi literatur
Untuk mendapatkan data dan landasan teori yang digunakan dalam tugas akhir dan
pembuatan alat (prototip lampu pejalan kaki) dibutuhkan referensi dari buku, artikel
– artikel, dan jurnal – jurnal serta informasi yang berkaitan dengan Solar Cell, IC
(Integrated Circuit) 74HC595, IC uln 2803, Sensor Infrared, Accumulator,
komunikasi menggunakan gelombang radio (EMS RF Transceiver), dan
Mikrokontroler arduino uno.
2.
Eksperimen, yaitu dengan secara langsung melakukan praktek maupun pengujian
terhadap hasil pembuatan alat dalam pembuatan tugas akhir ini.
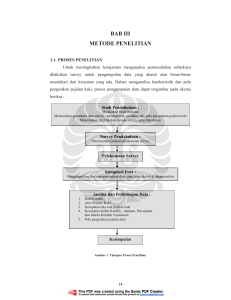
3.
Perancangan alur kerja sistem secara umum
Merancang alur atau diagram kerja yang akan dipakai dalam tugas akhir. Alur
kerja sistem akan menjelaskan proses dari awal Solar Cell memberikan daya atau
tegangan sumber untuk lampu pejalan kaki (sekaligus lampu lalu lintas) dibantu
solar charger dengan tipe PWM. Sensor infrared sebagai input, akan mendeteksi
kehadiran orang, dan menjalankan program untuk driver lampu pejalan kaki dengan
delay tertentu membuat lampu merah menjadi hijau, dan untuk lampu lalu lintas
berubah dari lampu hijau menjadi merah.
Sensor
Infrared
LAMPU PEJALAN
KAKI DAN APILL
(1)
LAMPU PEJALAN
KAKI DAN APILL
(2)
MASTER
SLAVE
Gambar 1.1. Blok diagram seluruh sistem secara umum.
Sensor
Infrared
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
5
4.
Perancangan dan pembuatan software pengoperasian lampu pejalan kaki
Merancang dan membuat program dengan mikrokontroler arduino (mikroboard
buat secara manual yang compatible dengan arduino uno) untuk pengoperasian
lampu pejalan kaki dengan sensor infrared sebagai input (mendeteksi kehadiran
orang, pejalan kaki). Membuat program untuk pengaturan proses lampu pejalan
kaki (penyebrangan jalan lurus 2 arah) dengan bantuan komunikasi menggunakan
EMS RF Transceiver antara lampu pejalan kaki satu dengan lainnya.
5.
Perancangan dan pembuatan hardware
Perancangan dan pembuatan ini bertujuan untuk menciptakan sebuah prototip
lampu pejalan kaki yang bekerja secara otomatis dengan sensor dan bertenaga surya
(memanfaatkan solar cell). Berdasarkan Gambar 1.1 rangkaian akan bekerja jika
sensor infrared mendeteksi kehadiran orang (pejalan kaki). Mikrokontoler akan
mengolah data yang diperoleh dari output sensor dan mengoperasikan lampu
pejalan kaki secara otomatis (membuat lampu berwarna hijau dari lampu berwarna
merah) dengan program yang telah dibuat pada software arduino.
6.
Pengambilan data (pengujian alat dan program)
Pengambilan data dan pengujian hardware prototip lampu pejalan kaki dilakukan
dengan tahap :
a. Pengambilan data (percobaan langsung) prototip dengan penggunaan solar
cell sebagai sumber tegangan dan listrik untuk penghidupan lampu.
b. Percobaan dengan sensor infrared dalam mendeteksi kehadiran pejalan
kaki, pengenalan program sensor infrared.
c. Pengujian dan pengambilan data secara langsung, dalam penggunaan sistem
mandiri tenaga surya (supply lampu pejalan kaki) dan lampu pejalan kaki
bekerja ketika terdapat input dari sensor infrared dalam mendeteksi
kehadiran pejalan kaki.
7.
Analisis dan penyimpulan hasil tugas akhir
Analisa dengan melakukan pendataan dari hasil pengoperasian lampu pejalan kaki
dengan menggunakan sensor infrared sebagai input untuk lampu pejalan kaki
tersebut. Analisa dan pembahasan dilakukan dengan mengamati secara langsung
simulasi yang dilakukan dengan prototip lampu pejalan kaki dapat berjalan dengan
baik dan sesuai dengan program yang telah dibuat.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB II
DASAR TEORI
2.1.
Solar Cell
Solar cell yang berarti sel surya merupakan komponen elektronik yang dapat
mengubah atau mengkonversikan energi cahaya gelombang pendek menjadi energi
listrik.[4] Sel surya umumnya memiliki ketebalan minimum 0.3 mm. Sel surya terbuat dari
bahan semikonduktor dengan kutub positif dan kutub negatif. Solar cell dalam
pembuatannya menggunakan bahan silikon kristal (yang umumnya banyak dan sering
digunakan). Sel surya memanfaatkan sumber energi cahaya atau sinar matahari yang
merupakan sumber paling hemat energi dan tidak pernah habis. Sinar matahari diubah oleh
material dalam solar cell menjadi energi listrik yang kemudian dapat digunakan pada
peralatan – peralatan elektronik. Satu sel surya dapat menghasilkan tegangan DC sebesar
0.5 – 0.6 V, maka itu sel surya dihubungkan secara seri untuk membentuk sebuah modul
Solar cell. Sel surya yang dihubungkan menjadi satu modul mencapai 28 -36 sel untuk
mendapatkan tegangan DC sebesar 12 V. Satu modul solar cell dalam aplikasinya juga
masih menghasilkan energi atau tenaga listrik yang kecil atau rendah, rata – rata
maksimum tenaga listrik yang dihasilkan oleh satu modul tersebut sebesar 130 Watt. Maka
itu dalam penggunaannya, modul – modul tersebut dapat disusun menjadi satu
(digabungkan) sehingga membentuk sebuah array, yang dapat menghasilkan tenaga listrik
yang lebih besar.[5]
Prinsip dasar dari solar cell adalah efek fotovoltaik yang telah ditemukan oleh
seorang ilmuwan yang berasal dari Perancis, Alexander Edmond Becquerel, pada tahun
1839. Efek fotovoltaik adalah pelepasan muatan positif dan negatif dalam materi padat
melalui cahaya. Beliau menggunakan perbedaan potensial dari sebuah larutan kimia yang
terkena sinar matahari dan satunya yang tidak terkena sinar matahari. Pada larutan tersebut
kemudian dimasukkan elektroda platina. Dari percobaan ini beliau mendapatkan adanya
aliran listrik.[4]
Pada tahun 1905, Albert Einstein dapat menjelaskan tentang efek fotovoltaik secara
teori. Melalui teori Quantum, beliau dapat menjelaskan bahwa cahaya memiliki sifat
6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
7
sebagai gelombang dan juga photon. Dengan percobaannya, Einstein menjelaskan untuk
efek fotovoltaik bahwa cahaya bersifat seperti kumpulan dari bagian – bagian kecil yang
disebut photon. Energi photon ini bergantung pada panjang gelombang cahaya. Jika cahaya
mengenai sebuah logam dan memiliki energi yang cukup, elektron yang berada di dalam
logam yang terkena photon tersebut, akan terlepas dari ikatan energi di dalam atomnya.
Dengan lepasnya ikatan energi ini, elektron – elektron tersebut dapat berpindah atau
mengalir, disitulah terjadi energi listrik[4]. Gambar 2.1 menunjukan bagaimana solar cell
mengubah sinar matahari menjadi energi listrik dan bentuk fisik dari solar cell.
(a)
(b)
Gambar 2.1. (a). Sistem kerja dalam Solar cell (b). Bentuk fisik Solar Cell.
Menurut struktur kristalnya, solar cell dapat dibedakan menjadi monokristal,
polikristal, dan amorph. Solar cell monokristal memiliki warna biru gelap atau hitam dan
memiliki struktur yang teratur dengan efisiensi tertinggi (dibandingkan dengan sel surya
yang lainnya) yaitu mencapai 20%. Kemudian yang kedua, solar cell polokristal
merupakan sel surya yang terdiri atas banyak kristal silisium kecil yang disebut juga
multikristal. Sel surya ini umumnya berwarna biru, namun tidak setua monokristal.
Polikristal dibuat dari coran silusium yang berbentuk seperti bunga kristal es pada
permukaannya. Solar cell polikristal tidak memiliki efisiensi sebesar monokristal, yaitu
hanya mencapai 16%. Namun sel surya jenis polikristal memiliki kelebihan dalam bidang
ekonomi, yaitu biaya penggunaannya yang tidak setinggi penggunaan monokristal.
Kelebihan kedua dari sel surya polikristal yaitu efisiensi yang dimilikinya tidak cepat turun
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
8
ketika sumber energi cahaya yang didapatkan tidak maksimal (redup). Jenis solar cell yang
ketiga, adalah solar cell jenis amorph. Sel surya jenis amorph memiliki warna coklat tua
hingga keunguan, dan terdiri atas silisium tipis yang ditempatkan (dengan metode uap)
pada bahan dasar, misalkan kaca. Solar cell jenis amorph merupakan sel surya yang paling
ekonomis dan memiliki efisiensi 6 – 8%, umumnya ditemukan pada aplikasi kalkulator dan
jam tangan[4]. Efisiensi pada panel surya atau solar cell dapat dihitung menggunakan
persamaan 2.1 di bawah ini, yaitu :
100 %
ղ=
Dimana
:
(2.1)
ղ
=
Efisiensi solar cell
(%)
Voc
=
Open circuit voltage
(Volt)
Isc
=
Short circuit current
(Ampere)
FF
=
Fill factor
(sekitar 0.7 – 0.85)
G
=
Intensitas matahari
(Watt/m2)
A
=
Luas penampang solar cell
(m2)
Nilai efisiensi pada panel surya dapat diketahui dengan pengukuran kurva V-I yang
kemudian didapatkan parameter – parameter lain seperti Isc (arus hubung singkat), Voc (
tegangan tanpa beban), Fill Factor (FF), efisiensi (Ղ) dan Pm (Power maximum-output
dari PV array). Karakteristik output panel surya (solar cell) dapat dilihat pada kurva
perfomansi, kurva V-I menunjukan hubungan antara arus dan tegangan[5]. Kurva
karakteristik output solar cell ditunjukan pada Gambar 2.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
9
Gambar 2.2. Kurva karakteristik V-I
Pada kurva V-I tersebut didapatkan atau dibuat berdasarkan pada saat Test Condition,
dimana pengujian solar cell disaat intensitas matahari mencapai puncaknya yaitu 1000
Watt/m2 (kondisi yang dinamakan one peak sun hour) dan suhu solar cell sebesar 25oC [5].
Persamaan fill factor pada panel surya atau solar cell didapatkan dari parameter Voc
atau tegangan rangkaian terbuka (open circuit voltage) yang diukur secara langsung pada
panel surya (solar cell) pada karakteristik V-I pada solar cell tersebut. Nilai fill factor pada
sistem solar cell berhubungan dengan efisiensi pada panel surya (solar cell), semakin besar
nilai fill factor maka panel surya semakin baik dan memiliki efisiensi yang semakin besar
atau tinggi. Perhitungan nilai fill factor dapat dihitung menggunakan persamaan 2.2 di
bawah ini[5] :
FF =
Keterangan
:
(
.
)
Voc
= Open circuit voltage (Volt)
0,72
= konstanta untuk mendapatkan hasil yang akurat
(2.2)
Pada kurva V-I terdapat 3 hal yang penting yaitu Maximum power point (Vmp dan
Imp), Open circuit voltage (Voc), dan short circuit current (Isc). Maximum Power Point
yang terdiri atas Vmp dan Imp merupakan titik operasi maksimal ketika solar cell dalam
kondisi operasional. Dimana solar cell diberikan beban saat temperatur 25oC (atau 77oF)
dengan intensitas matahari sebesar 1000 Watt/m2. Maksimal daya yang dihasilkan dapat
diketahui dengan perkalian antara Vmp dengan Imp.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
10
Open Circuit Voltage (Voc) merupakan kapasitas tegangan maksimum yang dapat
dicapai pada saat tidak ada arus atau current sama dengan nol. Otomatis daya pada saat
open circuit (Voc) sama dengan nol watt. Dan yang terakhir, Short circuit current (Isc)
adalah maksimum output arus yang keluar dari solar cell saat kondisi tidak ada resistansi
atau short circuit[5].
Pengoperasian solar cell secara maksimum dapat dipengaruhi oleh beberapa faktor di
bawah ini
:
a) Ambient air temperature
Solar cell dapat bekerja secara maksimal dengan temperatur atau suhu yang normal
yaitu 25oC. Suhu pada panel yang melebihi dari kondisi normal saat operation ini
akan mengakibatkan energi listrik yang dihasilkan tidak maksimal, terutama
berpengaruh terhadap open circuit voltage (Voc). Setiap kenaikan 1oC pada panel
surya, akan mengakibatkan tegangan yang dihasilkan menurun 0.4% dari total
energi yang dihasilkan.
b) Radiasi sinar matahari (Insolation)
Radiasi atau intensitas sinar matahari juga berpengaruh besar terhadap kinerja solar
cell. Intensitas sinar matahari banyak berpengaruh terhadap arus yang dihasilkan
oleh solar cell.
c) Kecepatan angin bertiup
Kecepatan tiup angin di seikitar solar cell akan membantu untuk menjaga
permukaan modul panel surya (solar cell) untuk tetap pada suhu normal (tidak
melebihi atau kurang dari suhu normal). Karena ketika suhu pada modul panel
surya tidak stabil, akan mempengaruhi kinerja solar cell dalam menghasilkan arus
dan tegangan (serta energi listrik) yang akan digunakan untuk supply.
d) Keadaan atmosfir bumi
Keadaan dari atmosfir bumi (berawan, mendung), dapat memperngaruhi kinerja
solar cell dalam menghasilkan arus listrik secara maksimal.
e) Orientasi panel atau array solar cell
Posisi modul panel surya atau solar cell (sudut atau tilt angle) juga mempengaruhi
kinerja modul dalam mengolah sinar matahari menjadi energi listrik. Energi listrik
(arus listrik dan tegangan) yang maksimal dihasilkan dengan posisi panel surya
yang tegak lurus dengan cahaya atau sinar matahari. Posisi modul yang tegak lurus
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
11
terhadap sinar matahari akan membantu kinerja modul dalam memproduksi energi
listrik yang dibutuhkan sebagai supply untuk beban.
Di bawah ini terdapat Tabel 2.1 yang menunjukkan spesifikasi dari solar cell yang
digunakan dalam perancangan prototip.
Tabel 2.1. Spesifikasi solar cell kapasitas 10 Wp.
Maximum Power
10 watt
Optimum operating voltage
17.2 V
Optimum operating current
0.58 A
Open-circuit voltage
21.6 V
Short-circuit current
0.68 A
Temperature
25 ᴼC
2.1.1. Solar Charge Controller
Dalam panel surya atau solar cell biasanya dilengkapi dengan perangkat solar
charge controller, perangkat ini merupakan perangkat yang paling penting dalam sistem
solar cell. Perangkat ini digunakan untuk mengatur atau mengontrol dalam pengisian
baterai oleh panel surya, supaya tidak terjadi overcharging. Solar charge controller sendiri
merupakan perangkat elektronik yang digunakan untuk mengatur arus searah yang diisi ke
baterai dan dikeluarkan dari baterai ke peralatan elektronik.[6] Fungsi sebuah perangkat
solar charge controller secara detail, adlah sebagai berikut[7] :
untuk mempertahankan keadaan baterai dengan mencegah terjadinya distribusi arus
dan tegangan yang berlebihan pada baterai (overcharging) dan kelebihan voltase
dari panel surya.
untuk mengatur arus yang dibebaskan atau diambil dari baterai agar tidak full
dishcarge dan overloading.
Untuk monitoring temperatur atau suhu baterai.
Rangkaian solar charge controller terdiri dari 2 jenis, yaitu rangkaian seri dan
rangkaian paralel. Pada rangkaian seri letak komponen pemutus dihubungkan secara seri
antara modul sel surya dengan baterai. Sedangkan pada rangkaian paralel, posisi
komponen pemutus dihubungan secara paralel antara modul sel surya dengan baterai[6].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
12
Gambar 2.3 merupakan contoh rangkaian schematic solar charge controller yang
terhubung secara serial.
Gambar 2.3. Contoh rangkaian schematic Solar charge controller serial.
Solar Charge Controller ada yang bertipe PWM (Pulse Width Modulation) dan
MPPT (Max Power Point Tracker). Solar Charge Controller tipe PWM atau Pulse Width
Modulation menggunakan teknik modulasi yang merubah data atau informasi menjadi
sebuah sinyal pulsa, dan PWM ini merupakan salah satu prinsip algoritma yang
difungsikan dalam sistem solar charge controller. Dengan perbedaan lebar antara sinyal
pulsa yang bernilai 0 dan 1 seperti menciptakan sinyal sinusoidal yang bersifat kontinyu
untuk pengisian baterai maupun pengisian langsung menuju beban. Sedangkan Solar
Charge Controller dengan tipe MPPT atau Maximum Power Point Tracking/Tracker
efisien dalam konversi DC to DC (Direct Current), pada sistem ini MPPT dapat
mengambil daya maksimal dari panel surya untuk memberikan energi pada beban, dan
apabila terdapat kelebihan daya maka daya tersebut akan disimpan pada baterai[7]. Pada
Gambar 2.4 ditunjukan bentuk fisik solar charge controller dengan tipe PWM (Pulse
Width Modulation).
Gambar 2.4. Bentuk fisik solar charge controller tipe PWM
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
13
Solar charge controller memiliki 3 output dengan masing – masing 1 output terdiri
dari 2 buah terminal. Satu output (2 buah terminal) pertama digunakan untuk output dari
panel surya. Satu output (2 buah terminal) yang kedua digunakan untuk output baterai atau
accumulator. Dan 1 output lainnya digunakan untuk output langsung menuju beban. Arus
DC yang berasal dari baterai atau accumulator tidak akan kembali ke panel surya (berbalik
arah) karena terdapat sebuah diode protection yang mengarahkan arus DC hanya berjalan
dari panel surya menuju baterai atau accu. Ada 2 macam cara kerja atau mode operational
pada solar charge controller yaitu mode charging, dan mode operation atau operasi. Mode
charging bekerja untuk mengisi baterai atau accu, pengaturan arus dan tegangan diatur
supaya tidak overcharging atau overvoltage. Sedangkan mode operation solar charge
controller bekerja dan beroperasi sebagai pengatur pemberian energi listrik pada beban
dari baterai atau accu, supaya tidak terjadi full disharge (baterai dalam keadaan habis daya
listrik).
2.1.2. Baterai (Accumulator)
Accumulator atau aki merupakan baterai yang biasanya digunakan dalam sistem
panel surya (solar cell). Accu berfungsi untuk menyimpan arus listrik yang dihasilkan oleh
solar cell saat pagi sampai sore hari. Accu atau aki (baterai) dapat merubah energi kimia
menjadi energi listrik. Penggunaan accu akan dilakukan pada malam hari, dimana sinar
matahari untuk sumber energi solar cell mulai berkurang. Accumulator dapat diisi ulang
saat pagi sampai siang hari, dimana solar cell bekerja dengan maksimal (dengan sumber
energi sinar matahari mencukupi). Maka itu penggunaan baterai accu ini efisien dalam
sistem solar cell atau modul surya. Baterai merupakan komponen atau perangkat yang
berguna untuk menyimpan arus listrik yang dihasilkan oleh sumber (solar cell), sebelum
arus listrik disalurkan menuju alat – alat elektronik atau beban seperti : LED, Traffic Light.
Pada baterai terdapat 2 jenis elemen (yang merupakan sumber arus DC) yaitu
elemen primer dan elemen sekunder. Accumulator termasuk ke dalam elemen sekunder,
dan dalam penggunaannya elemen sekunder harus terlebih dahulu diisi (dialirkan arus)
atau diberi muatan secara kontinyu sebelum digunakan pada beban. Dalam accumulator
berlangsung proses elektrokimia reversibel (bolak – balik) dengan efisisensi yang tinggi.
Dimana saat digunakan sebagai supply pada beban, pada accu terjadi proses perubahan
energi kimia menjadi energi listrik (discharging) dan pada saat diisi atau diberi muatan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
14
terjadi proses perubahan dari energi listrik menjadi energi kimia (charging)[8]. Kapasitas
pada baterai (accumulator) disimbolkan dengan satuan AH (Ampere Hour), dengan arti
setiap ampere berlaku untuk 1 jam pengisian untuk beban (supply). Sebagai contoh, 4 AH
berarti bahwa baterai atau accu dapat menyuplai beban sebesar 4 ampere selama 1 jam,
atau sebesar 1 ampere selama 4 jam[8].
Untuk mengetahui lama pengisian (waktu) pada baterai (accu) dapat dihitung
menggunakan persamaan 2.3 di bawah ini[8] :
Ta =
Keterangan
:
atau
Ta =
(2.3)
Ta
= Lama waktu pengisian accu
(Jam)
Ah
= Besarnya kapasitas accu
(Ampere Hours)
h
= Besarnya arus pengisian ke accu
(Ampere)
daya Ah =Besarnya daya yang didapatkan dari perkalian Ah dengan
tegangan accu (Watt Hours)
daya h
= Besarnya daya yang didapatkan dari perkalian h dengan
tegangan accu (watt)
Setiap baterai (accumulator) memiliki spesifikasi atau standard dalam pengisian muatan
sampai penuh. Perbedaan kapasitas tegangan yang dimiliki baterai (accu) mempengaruhi
standard tegangan untuk pengisian arus listrik atau pengisian ulang muatan. Pada tabel 2.2
di bawah ini menjelaskan standard untuk setiap kapasitas baterai atau accumulator[8].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
15
Tabel 2.2. Tabel state of charge standard batteries
Percent
Of
Charge
(%)
Kapasitas
6V
(Volt)
Kapasitas 8
V
(Volt)
Kapasitas
12 V
(Volt)
Kapasitas
24 V
(Volt)
Kapas
-sitas
36 V
(Volt)
Kapasitas
42 V
(Volt)
Kapasitas
48 V
(Volt)
Kapasitas
72 V
(Volt)
Kapasitas
120 V
(Volt)
100
6.37
8.49
12.73
25.48
38.22
44.59
50.96
76.44
127.4
90
6.31
8.41
12.62
25.24
37.86
44.17
50.48
75.72
126.2
80
6.25
8.33
12.5
25
37.5
43.75
50
75
125
70
6.19
8.25
12.37
24.76
37.14
43.33
49.52
74.28
123.8
60
6.12
8.15
12.24
24.48
36.72
42.84
48.96
73.44
122.4
50
6.05
8.07
12.1
24.2
36.3
42.35
48.5
72.6
121
40
5.98
7.97
11.86
23.92
35.88
41.86
47.84
71.76
119.6
30
5.91
7.88
11.71
23.64
35.46
41.37
47.28
70.92
118.2
20
5.83
7.77
11.66
23.32
34.98
40.81
46.64
69.96
116.6
10
5.75
7.67
11.51
23
34.5
40.25
46
69
115
2.2.
Mikrokontroler Arduino UNO
Mikrokontroler arduino uno merupakan sebuah board mikrokontroler dengan nama
produk arduino uno. Di dalam board mikrokontroler arduino uno mengandung
mikrokontroler Atmega328. Mikrokontroler Atmega328 merupakan sebuah keping yang
secara fungsional bertindak seperti sebuah komputer. Piranti ini dapat digunakan untuk
mewujudkan rangkaian elektronik dari yang paling sederhana hingga yang kompleks.
Mikrokontroler arduino uno terdapat mikroprosesor yang berupa Atmel AVR, regulator
tegangan 5 V, dan oscillator 16 MHz yang dapat melaksanakan operasi berdasarkan waktu
secara tepat[8]. Arduino UNO dilengkapi dengan static random-access memory (SRAM)
berukuran 2KB sebagai pemegang data, flash memory berukuran 32KB (0.5 KB untuk
bootloader), dan erasable programmable read-only memory (EEPROM) sebagai
penyimpan data[9].
Mikrokontroler Arduino UNO mendapatkan supply tegangan dari laptop atau PC
dengan menggunakan kabel USB yang dihubungkan ke mikrokontroler tersebut. Tegangan
yang dianjurkan untuk menyuplai mikorokontroler arduino adalah sebesar 7 – 12 Volt
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
16
(namun dengan tegangan supply sebesar 5 V mikrokontroler sudah dapat bekerja dengan
baik). Kabel USB selain digunakan sebagai suply tegangan dari PC/Laptop menuju
mikrokontroler juga digunakan untuk mengunduh program atau sketch pada software
Arduino IDE menuju mikrokontroler. Apabila supply tegangan tidak dilakukan melalui
kabel USB, Arduino UNO harus tetap mendapatkan supply tegangan dari sumber tegangan
eksternal sebesar 9V. Mikrokontroler Arduino UNO memiliki 14 buah pin input/output
digital, 6 buah pin analog input, 3 buah pin untuk ground (GND), 2 buah pin supply
tegangan (yaitu 5V dan 3.3V), 1 buah pin tegangan input (Vin), 1, buah pin IOREF, 1 buah
pin AREF, dan 1 buah pin Reset. Tabel 2.3. menunjukan fungsi pada port – port atau pin –
pin dalam mikrokontroler Arduino UNO. Gambar 2.5 menunjukan bentuk fisik atmega
328, dan Gambar 2.6 menunjukan bentuk fisik dari board mikrokontroler arduino UNO.
Gambar 2.5. Mikro atmega328P-PU [9]
Tabel 2.3 Fungsi port – port dalam mikrokontroler Arduino UNO
PIN / PORT
0 – 13
Fungsi
Input / Output digital (setiap pin I/O
memiliki arus DC sebesar 40 mA)
Vin
Tegangan input eksternal
5V dan 3.3V
Supply tegangan yang dapat digunakan
GND
Ground yang dapat digunakan
0 dan 1
RX dan TX pin
3, 5, 6, 9, 10, 11
PWM pin
A0 – A5
Analog input
IOREF
AREF
Pin tegangan referensi untuk dapat
beroperasi pada mikrokontroler
Analog reference pin
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
17
Gambar 2.6. Bentuk fisik dari Mikrokontroler Arduino UNO
2.3.
Traffic Light
Traffic light merupakan alat pengatur isyarat lalu lintas yang terdiri dari beberapa
kumpulan LED. Lampu lalu lintas atau traffic light berfungsi sebagai pengatur lalu lintas
yang berada di jalan-jalan persimpangan, pertigaan, maupun jalan – jalan utama lainnya.
Lampu lalu lintas membantu para pengendara mobil dan motor untuk berjalan secara
bergantian dan teratur, serta tertib.
2.3.1. LED (Light Emitting Diode)
Light Emitting Diode adalah suatu diode yang dapat memancarkan sinar, arus
mengalir pada rangkaian dalam arah maju dan sinar dipancarkan dari junction semi
konduktor (pertemuan). Dengan kata lain LED adalah suatu elemen yang dapat mengubah
sinyal listrik ke dalam sinar atau cahaya.[10] LED mampu menghasilkan cahaya dan
panjang gelombang yang berbeda, menurut bahan semikonduktor yang digunakan.
Menurut bahan semikonduktornya dan perbedaan panjang gelombang, LED dapat
menghasilkan perbedaan warna – warna tersendiri.[11] Tabel 2.4. menunjukan perbedaan
warna – warna pada LED sesuai dengan bahan semikonduktor dan panjang gelombang
yang dihasilkan.
Light Emitting Diode memiliki 2 kutub yang berbeda yaitu kutub negatif (cathode)
dan kutub positif (anode). Gambar 2.7 menunjukkan simbol dari sebuah LED dan bentuk
fisik LED. Apabila arus listrik mengalir dari kutub positif menuju kutub negatif, maka
LED tersebut akan hidup atau menyala.[11] LED hanya dapat menyala atau hidup jika
diberikan arus maju (bias forwarding). Untuk membedakan polaritas pada LED, dapat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
18
dilihat perbedaan panjang kaki kutub negatif (cathode) yang lebih pendek daripada kutub
positif (anode). LED memiliki kapasitas arus sebesar 10 mA hingga 20 mA, dan dengan
tegangan 1.6 V hingga 3.5 V[12].
Gambar 2.7. Simbol LED dan bentuk fisik LED
Tabel 2.4. Tabel senyawa semikonduktor perbedaan warna pad LED[11]
BAHAN
WAVELENGTH (PANJANG
SEMIKONDUKTOR
GELOMBANG)
Gallium Arsenide (GaAs)
WARNA
850-940 nm
Infra merah
630-660 nm
Merah
605-620 nm
Jingga
585-595 nm
Kuning
550-570 nm
Hijau
430-505 nm
Biru
450 nm
Putih
Gallium Arsenide Phosphide
(GaAsP)
Gallium Arsenide Phosphide
(GaAsP)
Gallium Arsenide Phosphide
Nitride (GaAsPN)
Aluminium Gallium
Phosphide (AlGaP)
Silicon Carbide (SiC)
Gallium Indium Nitride
(GaInN)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
19
Light Emitting Diode akan menyala jika terjadi arus listrik yang melewati anode
menuju cathode. Selain itu, sebuah LED akan membutuhkan sebuah resistor yang
dihubungkan secara seri dengan LED, untuk membatasi arus yang akan mengalir atau
melewati LED. Arus yang terlalu berlebihan akan dapat merusak LED, sehingga LED
tidak dapat menyala secara maksimal dan berumur panjang. Nilai resistor yang dibutuhkan
untuk membatasi arus yang melewati LED dapat dihitung menggunakan persamaan 2.4 di
bawah ini, yaitu :
=
Dimana :
.
(2.4)
R
= Nilai resistor
(Ω)
V
= Tegangan supply
(V)
I
= Arus
(A)
V.led = Nilai tegangan dalam LED
(V)
Setiap warna LED memiliki tegangan maju (forward bias) yang berbeda. Maka itu tabel
2.5 dibawah ini menunjukan perbedaan tegangan saat arus maksimal yaitu 20 mA, pada
setiap warna LED di atas.
Tabel 2.5. Perbedaan Tegangan LED untuk Setiap Warna
Warna LED
Tegangan LED (saat arus maks : 20mA)
Infra merah
1.2 V
Merah
1.8 V
Jingga
2V
Kuning
2.2 V
Hijau
3.5 V
Biru
3.6 V
Putih
4V
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
20
2.4.
EMS RF Transceiver Shield
EMS RF Transceiver Shield merupakan modul shield Arduino compatible yang
dapat digunakan untuk transmisi data secara wireless. Modul ini dirancang berbasiskan
modul RFM12S 433 MHz, yaitu modul komunikasi wireless dengan frekuensi sebesar 433
MHz dan dengan jarak jangkauan 150 meter. RFM12S 433 MHz menggunakan antarmuka
SPI sebagai pengkasesannya oleh berbagai modul kontroler[13]. Modul komunikasi ini
menggunakan gelombang radio sebagai medium yang dilewatinya untuk mengirimkan data
dari Transmitter (TX) menuju Receiver (RX). Data yang akan dikirimkan menuju receiver
(RX) dimodulasi kemudian dikirimkan bersama atau ditumpangkan kepada sinyal carrier
(sinyal pembawa). Setelah sampai pada tujuan yaitu receiver (RX)data tersebut
didemodulasi menjadi data digital kembali, sehingga informasi yang dikirimkan dapat
diterima oleh receiver (RX) tersebut.
RFM12S yang memiliki pita frekuensi sebesar 433 MHz dapat bekerja atau
beroperasi dalam frekuensi 430,24 MHz sampai dengan frekuensi 439,7575 MHz[13].
Modul Transceiver ini dapat dijadikan sebagai transmitter maupun receiver. Karena
kelebihannya dalam komunikasi dan dapat menjadi transmitter maupun receiver, maka
aplikasi EMS RF Transceiver Shield banyak digunakan dalam sistem komunikasi jarak
jauh (wireless) , sistem telemetri, dan sistem kontrol jarak jauh. Pada Gambar 2.8
ditunjukan konfigurasi pin dari komponen RFM12-433S dan penjelasan fungsi untuk
setiap pin dalam tabel 2.6.
Dalam RFM12S 433 MHz terdapat fitur – fitur sebagai berikut
:
Antarmuka SPI sebagai kontrol komunikasi serial.
Bekerja dengan supply tegangan 2.2 V sampai dengan 3.8 V.
Konsumsi daya yang rendah.
AFC (Automatic Frequency Control) dan DQD (Data Quality Detection).
Internal data filtering dan clock recovery.
Direct differential antenna input/output.
Bandwidth dapat diatur.
Deviasi frekuensi TX dapat diatur (15 sampai 240 kHz).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
21
Dapat digunakan pola sinkronisasi pada RX (receiver).
RX (receiver) dapat diprogram dengan baseband bandwidth (67 sampai 400 kHz).
Datarate dapat mencapai 115.2 Kbps dalam mode digital.
Menggunakan teknologi PLL
Gambar 2.8. Konfigurasi pin RFM12-433S [13]
Tabel 2.6. Tabel fungsi pin pada RFM12-433S
Definisi
Tipe
Fungsi
nINT/VDI
DI/DO
Interrupt input (aktif rendah)/Valid data indicator
VDD
S
Positive power supply
DI
Input data SPI
SCK
DI
Input clock SPI
nSEL
DI
Chip select (aktif rendah)
SDO
DO
Serial data output with bus hold
nIRQ
DO
Interrupt request output (aktif rendah)
FSK/DATA/nFFS
DI/DO/DI
Transmit FSK data input / Receive data output (FIFO not
used) / FIFO select
DCLK/CFIL/FFIT DO/AIO/DO
Clock output (no FIFO) / external filter capacitor (analog
mode) / FIFO interrupts (active high) when FIFO level set
to 1, FIFO empty interruptioncan be achieved
CLK
DO
Clock output for external microcontroller
nRES
DIO
Reset output (aktif rendah)
GND
S
Power ground
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
22
Modul ini digunakan untuk komunikasi antara Traffic light atau Lampu Pejalan
Kaki Portable 1 dengan Traffic light atau Lampu Pejalan Kaki Portable 2 yang berada
pada seberang jalan lurus 2 arah tersebut. Modul komunikasi ini menggunakan gelombang
radio sebagai medium komunikasinya. Gambar 2.9 menunjukan bentuk fisik EMS RF
Transceiver Shield yang merupakan modul komunikasi pada prototip.
Gambar 2.9. EMS RF Transceiver
Modul komunikasi ini dapat menjangkau jarak sampai 150 meter dengan kapasitas
pengiriman data 433 MHz. Komunikasi antara Lampu Pejalan Kaki Portable 1 dengan
yang lainnya dibutuhkan, karena prototip tersebut diletakkan pada kedua sisi jalan lurus 2
arah (bukan persimpangan). Pengaturan modul komunikasi tersebut dapat dilakukan pada
salah satu Lampu Pejalan Kaki Portable (sebagai master) dan Lampu Pejalan Kaki
Portable lainnya menjadi slave, sehingga sistem pengatur antara Lampu Pejalan Kaki
Portable 1 dan 2 dapat saling berkoordinasi satu sama lain. Interface yang digunakan
merupakan jenis SPI dimana terdapat 4 buah pin yang dapat mengatur komunikasi antara 2
lampu pejalan kaki portable tersebut yaitu MISO, MOSI, SCLK/SCK, dan SS.
2.4.1. Modulasi Digital
Modulasi adalah teknik yang digunakan dalam suatu komunikasi dengan
menumpangkan sinyal informasi (data) kepada gelombang pembawa (sinyal carrier)[14].
Sinyal informasi atau data dengan frekuensi rendah, ditumpangkan kepada gelombang
pembawa yang memiliki frekuensi jauh lebih tinggi. Modulasi digital adalah teknik
pengkodean sinyal dari sinyal analog ke dalam sinyal digital (bit – bit pengkodean)[14].
Pada teknik modulasi ini sinyal informasi digital digunakan untuk merubah frekuensi dari
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
23
sinyal pembawa (carrier). Dalam komunikasi digital sinyal informasi yang akan
dikirimkan dinyatakan dalam bentuk digital yaitu bilangan biner “0” dan “1”, sedangkan
sinyal pembawa (carrier) berbentuk sinusoidal yang sudah termodulasi. Gambar 2.10
menunjukkan jenis – jenis modulasi digital.
Gambar 2.10. Jenis – jenis modulasi digital.
2.4.2. Modulasi FSK (Frequency Shift Keying)
Modulasi FSK (Frequency Shift Keying) termasuk ke dalam jenis modulasi digital.
Modulasi FSK sejenis dengan modulasi FM (Frequency Modulation), dimana sinyal
pemodulasinya (sinyal digital) menggeser outputnya antara dua frekuensi yang telah
ditentukan sebelumnya, yang biasa disebut frekuensi mark (merepresentasikan nilai 1) dan
space (merepresentasikan nilai “0”).[14] Modulasi digital dengan FSK juga menggeser
frekuensi sinyal pembawa (carrier) menjadi beberapa frekuensi yang berbeda didalam
band-nya menyesuaikan dari digit yang dilewatkannya. Pada modulasi FSK ini yang
berubah hanya frekuensi dari sinyal carrier saja, dengan amplitudo yang tetap (tidak
berubah). Teknik modulasi FSK banyak digunakan dalam komunikasi jarak jauh (telepaty).
Gambar 2.11 menunjukan teknik modulasi FSK (Frequency Shift Keying) dan Gambar
2.12 menunjukan teknik demodulasi FSK.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
24
Gambar 2.11. Teknik modulasi FSK (Frequency Shift Keying). [14]
2.4.3. Demodulasi FSK (Frequency Shift Keying)
Dalam metode komunikasi terdapat 2 teknik yaitu modulasi dan demodulasi.
Konsep umum demodulasi adalah pengembalian bentuk sinyal digital yang telah
dikirimkan menjadi sinyal data yang sesungguhnya. Teknik demodulasi merupakan teknik
pemisahan antara sinyal carrier dengan sinyal data, yang sebelumnya telah dimodulasi
oleh pengirim (transmitter). Demodulator merupakan alat yang dapat melakukan teknik
demodulasi ini, demodulator terdapat dalam modul penerima (Receiver). Proses
demodulasi ini dibutuhkan untuk memisahkan sinyal carrier dengan sinyal data, supaya
penerima dapat menerima data yang sesuai dengan apa yang telah dikirimkan oleh
pemancar. Data yang telah diterima oleh penerima dalam bentuk sinyal analog akan
dikonversikan atau diubah menjadi sinyal digital dimana hanya terdapat logika 0 dan 1
(frekuensi mark dan space), dinamakan teknik demodulasi FSK (Frequency Shift Keying).
Gambar 2.12. Teknik Demodulasi FSK (Frequency Shift Keying) oleh demodulator. [14]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
25
2.4.4. SPI (Serial Pheripheral Interface)
Serial Pheripheral Interface (SPI) merupakan sebuah metode pengiriman data dari
perangkat satu menuju perangkat lainnya.[15] Komunikasi menggunakan SPI terjadi antara
master dan slave dalam sebuah sistem mikrokontroler. SPI merupakan komunikasi dengan
kecepatan yang tinggi, dalam jarak dekat. Modul komunikasi EMS RF Transceiver
menggunakan SPI dalam pengkasesannya. Hal tersebut berarti bahwa komunikasi yang
terjadi antara sistem pengatur Lampu Pejalan Kaki Portable satu dengan yang lainnya
menggunakan komunikasi ini. Serial Pheripheral Interface memang satu – satu nya akses
dalam penggunaan modul komunikasi RFM12-433S.
Metode pengiriman data ini menggunakan dasar full duplex dan menjadi standar
sinkronisasi serial data link yang telah dikembangkan oleh Motorolla. Pada metode
komunikasi SPI (Serial Pheripheral Interface) digunakan 4 macam pin yang mengatur SPI
tersebut, yaitu[15] :
1. SCLK / SCK (Serial Clock)
Serial Clock merupakan bagian utama dalam komunikasi SPI, karena dalam SCLK
/ SCK terdapat data biner yang dikirimkan oleh master menuju slave yang
berfungsi sebagai clock dengan frekuensi tertentu. Clock merupakan salah satu
komponen prosedur dalam komunikasi data SPI.
2. MOSI (Master Output Slave Input)
Master Output Slave Input merupakan pin yang berfungsi sebagai jalur dari data
serial yang dikirimkan dari master (keluar dari master) dan menuju slave (masuk ke
bagian slave) dalam sebuah sistem mikrokontroler tersebut. Nama lain untuk pin ini
adalah SIMO (Slave Input Master Output), SDI (Slave Data Input), DI (Data
Input), dan SI (Slave Input).
3. MISO (Master Input Slave Output)
Master Input Slave Output merupakan pin yang berfungsi sebagai jalur dari data
serial yang dikirim oleh slave menuju master (diterima oleh master) dalam sebuah
sistem mikrokontroler. Nama lain untuk pin ini adalah SOMI (Slave Output Master
Input), SDO (Slave Data Output), DO (Data Output), dan SO (Slave Output).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
26
4. SS (Slave Select)
Slave select merupakan pin yang mengatur enable slave, karena komunikasi SPI
merupakan komunikasi full duplex (komunikasi 2 arah) maka dibutuhkan slave
yang juga aktif saat pengiriman data berlangsung. Slave akan aktif jika diberikan
logika low (active low). Nama lain untuk pin ini adalah CS (Chip Sleect), nCS, nSS,
dan STE (Slave Transmit Enable). Gambar 2.13 menunjukan SPI Bus dan SPI
Master – Slave Interconnection.
Komunikasi data SPI dimulai dengan pengiriman clock melalui pin SCK menuju slave
dengan frekuensi yang lebih kecil atau sama dengan frekuensi maksimum pada slave
tersebut. Kemudian master akan memberikan logika 0 (low) kepada pin SS (Slave Select)
utnuk mengaktifkan slave. Karena dalam komunikasi data SPI master dan slave harus
sama – sama aktif. Ketika slave sudah aktif, maka proses pengiriman data berjalan (saat
siklus clock juga berjalan). Proses pengiriman data full duplex dapat terjadi dengan 2
kemungkinan :
Master mengirimkan data sebuah bit melalui pin MOSI dan akan diterima oleh
slave pada pin dan jalur yang sama.
Slave mengirimkan data sebuah bit melalui pin MISO dan akan diterima oleh
master kembali pada pin dan jalur yang sama.
Pengiriman clock oleh master akan terus berjalan, hingga pengiriman data yang dilakukan
selesai. Master akan berhenti mengirimkan siklus clock dan menonaktifkan slave ketika
tidak ada data yang akan dikirimkan kembali.
(a)
(b)
Gambar 2.13. (a). SPI Bus (b). Master-slave Interconnection. [15]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
27
2.5.
Sensor Infrared
LED inframerah (infrared) merupakan dioda yang dapat memancarkan cahaya
inframerah. Cahaya inframerah tidak dapat terlihat dengan mata manusia, tapi dapat dilihat
dengan bantuan kamera sebagai indikasi inframerah (Infrared) menyala dan berfungsi
dengan baik. Infrared sendiri memiliki arti sebagai sinar elektromagnet yang memiliki
panjang gelombang cahaya lebih dari 700 nm dan 1 mm[16]. LED inframerah disini
digunakan sebagai transmitter (pengirim cahaya inframerah) dan terdapat receiver sebagai
penerima cahaya inframerah yang akan dikirimkan. Sinr inframerah (infrared) dapat
dibedakan menjadi 3 jenis berdasarkan panjang gelombangnya
[16]:
Near Infrared, dengan panjang gelombang 0,75 – 1,5 μm. Digunakan untuk
pencitraan pandangan malam (contoh : nightscoop).
Mid Infrared, dengan panjang gelombang 1,5 – 10 μm. Digunakan untuk sensor –
sensor infrared pada umumnya (contoh : remote control).
Far Infrared, dengan panjang gelombang 10 – 100 μm. Digunakan pada ala – alat
kesehatan.
Sinar infrared memiliki sifat sebagai berikut [16]:
Tidak tampak manusia.
Tidak dapat menembus materi atau media yang tidak dapat tembus pandang.
Dapat ditimbulkan oleh komponen yang menghasilkan panas.
Dengan kelebihannya inframerah yang tidak dapat dilihat oleh mata manusia, maka
inframerah sangat cocok digunakan sebagai sensor atau komunikasi dengan jarak jauh.
Data yang dikirimkan oleh pemancar infrared sensor adalah berupa pulsa yang berbentuk
digital. Penerima sensor infrared akan menerima data ketika inframerah memancarkan
cahayanya, data tersebut merupakan data yang dikirimkan menuju penerima (RX infrared
sensor) yang berasal dari pemancar (sensor infrared bagian TX). Data yang dikrimkan
sudah termodulasi secara otomatis saat akan dikirimkan ke penerima, dan pada penerima
data sudah otomatis terdemodulasi. Pada komunikasi infrared proses modulasi adalah
kondisi dimana logika 0 dan 1 diubah menjadi ada atau tidak ada sinyal carrier. Pada
transmisi sinar inframerah (infrared) 2 kondisi logika tersebut disebut dengan space
(menginterpretasikan logika 0 atau tidak ada sinyal) dan pulse (menginterpretasikan logika
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
28
1 atau ada sinyal)[16]. Gambar 2.14 menunjukan bentuk sinyal infrared yang
ditransmisikan atau dikirimkan.
Gambar 2.14. Bentuk sinyal infrared yang ditransmisikan.[16]
Aplikasi penggunaan infrared sensor banyak digunakan dalam sistem remote
control TV ataupun sistem kontrol lainnya. Pada remote control TV sensor infrared pada
remote akan ON dan OFF dengan frekuensi sinyal carrier yang umumnya sebesar 30 - 40
kHz, saat mentransmisikan data menuju sensor penerima (RX). Frekuensi sinyal carrier
yang digunakan dalam Modul sensor Infrared Transmiter sebesar 30 - 40 kHz dengan
kondisi media transmisi yang digunakan adalah udara[16]. Data yang telah dikirimkan oleh
sensor infrared tersebut akan diterima dan ditangkap oleh sensor receiver yang terdiri dari
photodiode (fotodioda) ataupun fototransistor. Pada gambar 2.16 ditunjukkan bentuk fisik
DT-I/O Infrared Transmitter dan Receiver.
(a)
(b)
Gambar 2.15 (a). Modul DT-I/O infrared transmitter (b). Modul DT-I/O infrared receiver.
Sensor pada prototip lampu pejalan kaki portable ini digunakan sebagai
pendeteksi kehadiran pejalan kaki yang akan menyebrang jalan lurus 2 arah. Sensor
infrared yang digunakan terdiri dari DT-I/O Infrared Transmitter sebagai pengirim sinyal
dan DT-I/O Infrared Receiver sebagai penerima sinyal yang dikirimkan oleh pengirim.
Pada perancangan di prototip infrared transmitter dan infrared receiver akan didesain
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
29
seperti sebuah gate. Dalam desain prototip infrared transmitter akan mengirimkan sinyal
digital untuk kemudian akan diterima oleh receiver, dan ketika terdapat perubahan kondisi,
dimana infrared transmitter terhalang oleh kehadiran orang (pejalan kaki) receiver
otomatis tidak akan menerima sinyal yang dikirimkan oleh infrared transmitter, sehingga
akan membuat receiver menindaklanjuti kondisi atau keadaan tersebut dalam proses
selanjutnya dalam mikrokontroler.
Sensor membaca kehadiran orang, ketika terjadi kondisi dimana cahaya infrared
yang terpancar oleh pengirim terhalang oleh kehadiran seseorang, sehingga penerima tidak
menangkap sinar infrared yang telah dimodulasi tersebut (diinterpretasikan dengan
keadaan logika 0). Perubahan yang terjadi pada pengiriman sinyal infrared tersebut akan
menyatakan bahwa terdapat pejalan kaki yang akan menyebrang jalan. Sedangkan ketika
transmisi mengirimkan sinar infrared menuju penerima dan dapat diterima oleh penerima,
kondisi tersebut diinterpretasikan dengan logika 1 atau high, dan mikrokontroler akan
membaca keadaan berikut sebagai keadaan default dimana lampu pejalan kaki tetap merah
dan APILL berwarna hijau.
Pada modul DT-I/O infrared transmitter terdapat 3 pin yang terdiri atas pin VCC
untuk tegangan supply atau tegangan input, pin GND yang digunakan sebagai input
ground, dan pin data yang mengirimkan data dari mikrokontroler (untuk transmitter).
Bagian pengirim akan diberikan logika 1 atau high untuk menghidupkan atau
mengaktifkan sensor, dan mengirimkan sinyal infrared secara kontinyu.
Sedangkan pada bagian receiver terdapat 4 buah pin header yang masing – masing
berfungsi sebagai VCC atau tegangan masukan, GND atau ground, dan 2 macam output.
Dua macam output tersebut adalah out dan not out, dimana hal tersebut berarti bahwa data
yang dihasilkan oleh receiver dapat bernilai benar atau salah (dapat diinterpretasikan
bernilai logika 0 atau 1). DT-I/O infrared transmitter dan receiver membutuhkan supply
tegangan sebesar 5 V untuk beroperasi dalam mengirimkan sinyal atau data infrared
tersebut.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
30
2.6.
Register Geser (Shift Register)
Register geser merupakan register yang dapat menghapus, menahan dan
melewatkan suatu data[17]. Register dapat melakukan proses pergeseran data dengan cara
mengumpankan data, dari flip – flop satu ke flip – flop lainnya. Arah pergeseran yang
dilakukan oleh register geser atau shift register dapat menuju ke kanan ataupun ke kiri.
Pergeseran bit ini sangat penting dalam operasi aritmatika dan operasi logika yang
digunakan dalam mikroprosesor (komputer). Register geser kiri, dimulai dari flip – flop
paling kanan dan bit akan bergeser ke kiri. Sedangkan register kanan dimulai dari flip –
flop paling kiri dan bit akan bergeser ke kanan.
Register geser sering dipergunakan dalam aplikasi pengaturan dot matrix, running
LED, dll. Dalam pengaturannya register geser dapat membuat aplikasi tersebut menjadi
lebih mudah dan efisien. Menurut perbedaan input dan output pada register geser terdapat
4 macam register yaitu[17] :
1. Paralel Input Paralel Output (PIPO)
PIPO merupakan register geser atau shift register yang diberikan masukan serentak
secara paralel dan menghasilkan output yang keluar serentak atau bersamaan
secara paralel.
2. Serial Input Paralel Output (SIPO)
SIPO merupakan register geser atau shift register yang diberikan masukan serentak
secara serial dan menghasilkan output yang keluar secara bersamaan secara
paralel.
3. Paralel Input Serial Output (PISO)
PISO merupakan register geser atau shift register yang diberikan masukan serentak
secara paralel dan menghasilkan output yang keluar secara bersamaan secara
serial.
4. Serial Input Serial Output (SISO)
SISO merupakan register geser atau shift register yang diberikan masukan serentak
secara serial dan menghasilkan output yang keluar secara bersamaan secara serial.
Untuk shift register atau register geser, terdapat macam – macam IC yang dapat
digunakan. IC shift register yang banyak digunakan dalam percobaan adalah IC dengan
seri 74LSxxx yang merupakan salah satu jenis IC TTL. Selain IC dengan seri 74LSxxx
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
31
juga terdapat seri 74HCxxx dan seri 74HCTxx. Gambar 2.16 menunjukkan proses
pergeseran data pada sebuah register geser, Gambar 2.17 dan 2.18 menunjukan contoh
register geser kanan dan kiri. Pada perancangan prototip menggunakan IC dengan seri
74HC595.
Gambar 2.16. Pergeseran data pada register geser.
Gambar 2.17. Contoh register geser kanan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
32
Gambar 2.18. Contoh register geser kiri.
Integrated Circuit 74HC595 merupakan IC shift register, dimana memiliki fungsi
utama untuk melakukan output paralel dari input serial. Pada prototip lampu pejalan kaki
portable menggunakan IC 74HC595 karena untuk pengaturan hidup atau aktifnya traffic
light dan lampu pejalan kaki, yang terdiri dari gabungan 12 buah LED. Dengan bantuan IC
ini rangkaian sistem tidak mengkonsumsi arus yang terlalu banyak saat proses pengaktifan
rangkaian 12 buah LED dalam satu buah desain lampu pejalan kaki portable. IC ini akan
bertugas sebagai register geser yang dapat menggeser setiap bit data yang dikirimkan
secara serial oleh mikrokontroler, sehingga pergeseran tersebut akan menciptakan
pergantian pengaktifan driver secara berurut sesuai waktu tunda (delay) yang ditentukan.
Setiap satu clock yang dikirimkan akan mendorong 1 bit data yang dikirimkan secara
serial oleh mikrokontroler. Gambar 2.19. menunjukan bentuk fisik Integrated Circuit
74HC595.
Gambar 2.19. IC 74HC595 (IC Shift Register)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
33
2.7.
Darlington Transistor Arrays (uln2803)
Rangkaian darlington merupakan rangkaian yang terdiri dari 2 buah transistor
bipolar, yang terhubung secara seri. Transistor darlington merupakan rangkaian yang
digunakan untuk mendapatkan penguatan (gain) yang tinggi. Transistor yang dihubungkan
secara darlington ini memiliki penguatan atau gain yang tinggi karena terjadi penguatan
2x, yaitu penguatan pada transistor pertama yang kemudian akan dikuatkan lagi oleh
transistor yang kedua. Penguatan yang terjadi pada rangkaian darlington ini adalah
penguatan arus dan sering dituliskan dengan simbol β atau hFE. Gambar 2.18 di bawah ini
menunjukan rangkaian elektronika transistor darlington.
Gambar 2.20. Rangkaian transistor darlington (pasangan transistor NPN)
Rangkaian transistor darlington ini ditemukan pertama kali oleh Sidney Darlington saat
bekerja di laboratorium Bell di Amerika Serikat. Rangkaian transistor darlington banyak
digunakan untuk aplikasi dalam chip IC (Integrated Circuit). Integrated Circuit (IC) yang
merupakan aplikasi daripada transistor darlington , dan digunakan sebagai driver dari
relay, lamp, display (LED)[18].
Salah satu aplikasi dari rangkaian transistor darlington adalah pada IC uln2803.
Pada IC ini terdapat rangkaian transistor darlington yang memiliki high-current dan highvoltage. Integrated Circuit jenis ini disebut juga sebagai IC drivers, dengan kelebihannya
yang dapat memberikan penguatan gain dan arus pada outputnya. IC driver ini memiliki
konfigurasi pin sebanyak 18 buah, dengan output arus sebesar 500 mA untuk setiap port
yang digunakan sebagai keluaran (output). Gambar 2.19 menunjukan konfigurasi pin pada
IC uln2803 dan Gambar 2.20 menunjukan rangkaian di dalam IC uln2803. Pada tabel 2.6
menjelaskan tentang fungsi pin / port dalam IC uln2803.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
34
Gambar 2.21. Konfigurasi pin pada IC Driver uln2803 (darlington transistor arrays).[18]
Tabel 2.7. Fungsi setiap pin atau port pada IC uln2803.[18]
Gambar 2.22. Rangkaian IC driver uln2803
Pada prototip lampu pejalan kaki portable yang dirancang, menggunakan IC uln
2803. IC ini berfungsi sebagai driver LED dalam rangkaian Lampu Pejalan Kaki dan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
35
Lampu Lalu Lintas. IC uln 2803 memiliki 18 buah pin yang terdiri dari pin input, output,
com, dan pin GND. Pin com merupakan tegangan masukan untuk rangkaian driver LED,
tegangan
masukan
yang
diberikan
saya
berikan
input
sebesar
5V,
karena
mempertimbangkan kapasitas tegangan masukan yang dapat mengaktifkan LED hanya
sekitar 1,6 V sampai 3,5 V.
Dalam rangkaian integrated circuit ini terdiri atas 8 pasang transistor darlington.
Rangkaian transistor darlington ini membantu setiap LED untuk hidup atau ON dengan
maksimal current
atau arus yang maksimal. Setiap pin dalam IC uln2803 memiliki
kapasitas arus output sebesar 500 mA untuk menyuplai masing – masing rangkaian LED.
di bawah ini menunjukan bentuk fisik dari IC uln2803. Pada setiap pin output akan
dihubungkan dengan pin header, dimana dari pin header tersebut akan dihubungkan keada
rangkaian resistor dan LED (lampu pejalan kaki dan lampu APILL) yang terhubung secara
paralel. Pada gambar 2.22 menunjukkan bentuk fisik dari sebuah IC atau Integrated Circuit
seri uln2803. Spesifikasi IC seri uln2803 ditunjukkan oleh tabel 2.8.
Gambar 2.23 Bentuk fisik IC uln2803.
Tabel 2.8. Spesifikasi IC uln2803[18].
Output Voltage (VO)
50 V
Input Voltage (VI)
30 V
Colector Current (IC)
500 mA
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
36
2.8.
Buzzer
Buzzer merupakan komponen elektronika yang dapat mengubah getaran atau aliran
listrik menjadi sebuah getaran suara (suara). Buzzer banyak digunakan dalam aplikasi
untuk indikasi suatu keadaan atau kondisi (alarm). Pada dasarnya buzzer
memiliki
kesamaan dalam prinsip kerja suatu loud speaker. Dalam buzzer terdapat sebuah kumparan
yang terpasang dalam diafragma, yang kemudian kumparan tersebut diberikan arus listrik
sehingga menjadi elektromagnet[19]. Gaya elektromagnetik yang ditimbulkan aliran listrik
tersebut dapat menggerakkan kumparan, yang kemudian berdampak pada getaran yang
terjadi pada kumparan. Pergerakkan yang dihasilkan oleh kumparan tersebut akan
meggetarkan diafragma dan menghasilkan sebuah suara yang bersumber daripada
diafragma yang terkena oleh perubahan gerakan yang dihasilkan oleh kumparan[19].
Buzzer dapat bekerja secara maksimal dengan tegangan input (supply) sebesar 3 V sampai
12 V[19]. Buzzer memiliki 2 buah kutub, yaitu kutub positif dan kutub negatif. Kutub
positif dihubungkan dengan supply tegangan (tegangan input) dan kutub negatif akan
dihubungkan dengan bagian pin atau port dari mikrokontroler. Pada Gambar 2.21
menunjukan simbol komponen elektronika buzzer dan Gambar 2.22 menunjukan bentuk
fisik dari buzzer (5 V).
Gambar 2.24. Simbol buzzer.[19]
Gambar 2.25. Contoh buzzer (5V).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
37
2.9.
Push Button
Push button atau tombol tekan atau lebih sering dikenal dengan sebutan switch,
merupakan komponen elektronika yang sederhana yang dapat memutuskan maupun
menyambungkan aliran listrik dalam sebuah sistem kerja dengan prinsip unlock (tidak
mengunci). Prinsip unlock ini berarti bahwa ketika saklar ditekan akan memutuskan atau
mengalirkan arus listrik, dan akan kembali normal ketika sudah tidak ditekan (dilepas)
[19]. Push button memiliki 2 kondisi logika yang diinterpretasikan dengan angka 0 dan 1
atau sering disebut dengan kondisi OFF dan ON. Dalam pengoperasian push button
terdapat istilah bouncing, yaitu keadaan dimana saat push button ditekan akan berosilasi
terus menerus (menghasilkan logika high dan low) sampai menghasilkan output yang
benar. Ada cara untuk menghilangkan atau mengatasi bouncing tersebut yaitu dengan
memberikan hambatan (R) dan kapasitor (C) pada rangkaian push button. Lebar minimum
untuk anti-bouncing pada push button sebesar 2,5 μs [20]. Rangkaian anti-bouncing
ditunjukkan pada Gambar 2.23.
Gambar 2.26. Rangkaian anti-bouncing push button
Nilai hambatan (R) dan kapasitor (C) dapat dihitung menggunakan persamaan :
=
Keterangan
:
T
: Waktu bouncing
(ms)
F
: Frekuensi
(Hz)
=
(2.5)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
38
R
: Hambatan
(Ω)
C
: Kapasitor
(F)
Ada 2 jenis push button dalam teori elektronika dasar, yaitu :
Push-button NO (Normally Open)
:
Push button yang memiliki kondisi awal kontak terbuka atau open, dimana tidak
ada aliran listrik yang mengalir menuju sistem kerja tertentu (saat tombol belum
ditekan). Namun ketika push button ditekan, kontak akan menutup atau close
sehingga mengalirkan listrik menuju sistem kerja tersebut. Push button ini
umumnya digunakan sebagai tombol start dalam sebuah sistem kerja.
Push-button NC (Normally Close)
:
Push button yang memiliki kondisi awal kontak tertutup atau close, dimana saat
tombol belum ditekan aliran listrik sudah mengalir dalam sistem kerja tertentu.
Namun ketika push button ditekan, kontak akan terbuka atau open sehingga aliran
listrik sudah tidak mengalir menuju sistem kerja tersebut. Push button ini umumnya
digunakan sebagai tombol stop dalam sebuah sistem kerja. Simbol push button NO
dan NC dapat dilihat pada Gambar 2.24 (a), dan bentuk fisik push button
ditunjukan pada Gambar 2.24 (b).
(a)
(b)
Gambar 2.27. (a) Simbol push button Normally Open dan Normally Close. (b) Bentuk fisik
push button
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
39
Dalam dunia elektronika ada 2 jenis rangkaian push button yang umum untuk digunakan,
yaitu :
a. Rangkaian push button dengan resistor pull-up.
Gambar 2.28. Rangkaian switch/push button pull-up
Rangkaian push button atau switch dengan resistor pull-up berarti memiliki konsep
utama dimana saat push button
atau switch pada rangkaian ditekan atau
dihubungkan (normally close) maka akan menghasilkan output yang bernilai low,
sedangkan saat posisi terbuka (normally open) output yang dihasilkan oleh
rangkaian tersebut akan bernilai high. Gambar 2.25 menunjukan rangkaian
switch/push button dengan resistor pull-up.
b. Rangkaian push button dengan resistor pull-down.
Gambar 2.29. Rangkaian switch/push button pull-down
Rangkaian push button atau switch dengan resistor pull-down berarti memiliki
konsep utama dimana saat keadaan push button atau switch pada rangkaian ditekan
atau dihubungkan (normally close) maka akan menghasilkan output yang bernilai
high, sedangkan saat keadaan terbuka (normally open) output yang dihasilkan oleh
rangkaian tersebut akan bernilai low. Gambar 2.26 menunjukan rangkaian
switch/push button dengan resistor pull-down.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB III
RANCANGAN PENELITIAN
3.1.
Konsep Dasar
Sistem pengatur lampu pejalan kaki portable ini dirancang dengan sensor infrared
untuk mendeteksi kehadiran pejalan kaki saat akan menyebrang jalan lurus 2 arah. Sel
surya juga dilengkapi pada sistem pengatur lampu pejalan kaki ini sebagai sumber energi
listrik yang utama. Sel surya akan memberikan energi listrik selama intensitas sinar
matahari mencukupi (pagi dan siang hari), dan saat intensitas sinar matahari tidak
mencukupi (sore dan malam hari) sumber energi listrik akan di backup oleh accumulator.
Energi listrik yang dihasilkan oleh solar cell akan disalurkan melalui perangkat solar
charge controller menuju ke beban (accu dan mikrokontroler). Pada pagi dan siang hari
saat intensitas sinar matahari mencukupi, sel surya selain mengisi daya listrik untuk sistem
pengatur, juga mengisi energi cadangan pada accumulator. Perancangan sistem pengatur
lampu pejalan kaki ini ditunjukan pada Gambar 3.1 .
SOLAR CELL
CHARGE
CONTROLLER PWM
SENSOR ORANG
(INFRARED)
ACCU
MIKROKONTROLER
SERIAL INPUT
PARALEL
OUTPUT
DRIVER
LAMPU PEJALAN
KAKI DAN LAMPU
LALU LINTAS (1)
EMS RF
TRANSCEIVER
LAMPU PEJALAN
KAKI DAN LAMPU
LALU LINTAS (2)
Gambar 3.1. Perancangan Sistem Pengatur Lampu Pejalan Kaki Portable
Sensor orang (infrared) terdiri dari 2 bagian yaitu transmitter (pengirim) dan
receiver (penerima) yang dirancang untuk mengatur pengaktifan lampu pejalan kaki
dengan delay tertentu. Ketika sensor orang mendeteksi kehadiran orang, maka bagian
receiver akan membaca kondisi atau keadaan tersebut sebagai logika 0 (low), dan akan
40
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
41
mengaktifkan tunda (delay) pada Lampu Pejalan Kaki 1 dan 2. Sedangkan ketika sensor
orang tidak mendeteksi kehadiran orang (pejalan kaki) maka bagian receiver akan
membaca keadaan tersebut sebagai logika 1 (high) maka tidak akan mengaktifkan tunda
untuk pengaktifan lampu pejalan kaki.
Dalam sistem pengatur lampu pejalan kaki, menggunakan komunikasi melalui
gelombang radio dengan modul Embeded Module Serial (EMS RF Transceiver Shield)
antara prototip lampu pejalan kaki satu dengan yang lainnya (pada kedua sisi jalan lurus 2
arah tersebut). Komunikasi antara lampu pejaln kaki 1 dan 2 dilakukan secara 2 arah (full
duplex). Lampu pejalan kaki 1 ditetapkan menjadi master dan lampu pejalan kaki 2
ditetapkan menjadi slave. Bagian master
akan selalu mengkomunikasikan atau
mengirimkan perintah - perintah yang dilakukan oleh bagian slave. Dan sebaliknya slave
akan mengirimkan informasi ketika di lampu pejalan kaki 2 (slave) terdapat pejalan kaki
yang akan menyeberang.
Data yang dihasilkan oleh bagian sensor orang akan diproses dan diolah oleh
mikrokontroler. Hasil data di mikrokontroler tersebut kemudian menjadi data input untuk
komponen Serial Input Paralel Output (SIPO) yaitu IC 74HC595. Data yang dikirimkan
oleh mikrokontroler dalam bentuk data serial dan oleh IC 74HC595 diolah menjadi data
paralel. Data yang dihasilkan oleh IC 74HC595 kemudian akan masuk ke dalam driver
LED yaitu IC uln2803. Driver LED (IC uln2803) akan mengatur dalam pengaktifan setiap
LED dalam satu rangkaian lampu pejalan kaki dan lampu lalu lintas yang mengatur
kendaraan pada jalan lurus 2 arah (bukan persimpangan).
3.2. Perancangan Software Sistem Pengatur Lampu Pejalan Kaki
Portable dengan Sumber energi Mandiri.
Diagram alir utama (pada bagian master) ditunjukkan pada Gambar 3.2. Mulai dari
inisialisasi port I/O pada mikrokontroler, lalu inisialisasi komunikasi antara Lampu pejalan
kaki 1 (master) dengan Lampu pejalan kaki 2 (Slave). Terlebih dahulu mengatur untuk
pengaktifan semua Lampu menjadi merah pada master dan slave selama 2 sekon.
Kemudian mengirimkan atau mengkomunikasikan setiap status atau statement kepada
slave. Pengaktifan lampu pada master dan slave diwakili oleh 4 status atau statement yang
terdiri dari 5 karakter. Pengiriman data status itu dilakukan oleh bagian master menuju
slave. Pemrograman juga dilakukan untuk mengatur pengaktifan sensor orang bagian
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
42
master dan slave. Selain pengaktifan sensor orang, terdapat tombol (push button) yang
dapat mengatur pengaktifan lampu pejalan kaki 1 dan 2. Tombol aktif ketika sensor tidak
dapat membaca kehadiran orang. Pada diagram alir utama ini terdapat 2 subrutin yaitu
subrutin setting sensor orang dan baca status atau statement pada slave.
Tunda atau delay yang diaktifkan saat lampu pejalan kaki merah menuju hijau
adalah selama 30 sekon atau jumlah orang sejumlah 5 orang. Ketika salah satu syarat
sudah terpenuhi,lampu pejalan kaki 1 (master) akan menyalakan lampu pejalan kaki hijau
dan mengirimkan data status atau statement yang menyimbolkan lampu APILL merah dan
lampu pejalan kaki hijau. Delay untuk pengaktifan lampu pejalan kaki hijau selama 20
sekon dan jumlah orang yang keluar menyeberang sudah sama dengan jumlah orang yang
masuk. Ketika syarat jumlah orang yang exit tidak sama dengan input lampu pejalan kaki
akan tetap hijau dan menunggu sampai dengan tunda selama 20 sekon habis.
3.2.1. Diagram alir subrutin baca status atau statement pada slave.
Diagram alir subrutin pada bagian slave ditunjukkan oleh Gambar 3.3 di bawah ini.
Pada bagian slave terjadi pembacaan setiap status atau statement yang dikirimkan oleh
bagian master. Selain itu, slave juga dapat mengirimkan simbol ketika terdapat kehadiran
orang atau aktifnya tombol maupun jumlah orang yang sudah mencapai 5. Pengiriman data
yang dilakukan oleh slave kepada master dilakukan saat ada syarat – syarat berikut di atas,
karena slave membutuhkan status yang berisi perintah untuk slave melakukan tindakan.
3.2.2. Diagram alir subrutin setting sensor orang (sensor infrared)
Pada diagram alir subrutin yang ditunjukkan oleh Gambar 3.4 di bawah ini adalah
pengaturan atau setting untuk sensor orang. Sensor orang terdiri atas 2 bagian yaitu bagian
pengirim sinyal infrared (TX) dan penerima sinyal infrared. Pengaturan pada bagian
pengirim (TX) adalah mengaktifkan atau memancarkan sinar infrared secara terus –
menerus (kontinyu) atau aktif high. Sedangkan pada bagian penerima (RX) diaktifkan
untuk menerima hasil berlogika 0 atau low ketika adanya kehadiran orang, karena sinar
infrared tidak dapat diterima oleh penerima.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
43
A
START
TUNDA -1
INISIALISASI
PORT I/O
N
BACA SENSOR
ORANG
TUNDA = 0
Y
INISIALISASI
KOMUNIKASI
BACA STATUS /
STATE SLAVE
APILL MERAH, PJL
KAKI MERAH
SELAMA 2S
N
SET DEFAULT
MERAH SEMUA
SELAMA 2 SEKON
(MASTER)
AKTIF
Y
KIRIM S0 KE SLAVE
KIRIM S0 KE SLAVE
APILL KUNING, PJL
KAKI MERAH
SELAMA 2S
ORANG +1
APILL HIJAU,PJL
KAKI MERAH
(MASTER)
KIRIM S1 KE SLAVE
Y
N
ORANG = 5
SET TUNDA = 20 S
KIRIM S2 KE SLAVE
APILL MERAH, PJL
KAKI HIJAU
SETTING
SENSOR
ORANG
KIRIM S3 KE SLAVE
CEK SENSOR ORANG
CEK JUMLAH PJL
KAKI
TUNDA -1
BACA STATUS /
STATE SLAVE
N
E=i
Y
SENSOR ORANG
AKTIF
N
N
TUNDA = 0
Y
Y
APILL MERAH, PJL
KAKI MERAH
CEK ORANG
CEK TOMBOL
KIRIM S1 KE SLAVE
Y
N
AKTIF
APILL HIJAU,PJL
KAKI MERAH
(MASTER)
SET TUNDA 30 S
KIRIM S2 KE SLAVE
A
END
Gambar 3.2. Diagram alir utama (master).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
44
START
INISIALISASI
STATE /
STATUS
BACA STATUS /
STATE
N
STATE 3 (S3)
Y
PJL KAKI HIJAU,
APILL MERAH
N
STATE 0 (S0)
Y
PJL KAKI MERAH,
APILL MERAH
N
N
STATE 1 (S1)
STATE 2 (S2)
Y
Y
PJL KAKI MERAH,
APILL KUNING
PJL KAKI MERAH,
APILL HIJAU
CEK JUMLAH
ORANG
N
AKTIF S.ORG
CEK TOMBOL
Y
Y
KIRIM “Y” KE
MASTER
HITUNG JML
ORANG
N
ORANG = 5
Y
KIRIM “F” KE
MASTER
END
Gambar 3.3. Diagram alir subrutin pada slave.
N
AKTIF
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
45
START
INISIALISASI SENSOR
INFRARED (SENSOR
ORANG)
SET PENGAKTIFAN
SENSOR TX
SET PENGATURAN
RX
CEK SENSOR IR (RX)
BERNILAI HIGH/
LOW
END
Gambar 3.4. Diagram alir subrutin setting sensor orang.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
46
3.2.3. Format Paket Data
Format paket data yang akan dikirimkan oleh master menuju slave sejumlah 5
karakter dalam setiap status atau statement. Paket data tersebut terdiri dari perintah untuk
pengkatifan setiap lampu lalu lintas dan lampu pejalan kaki. Lima karakter tersebut terdiri
dari simbol perintah untuk pengaktifan lampu pejalan kaki, simbol perintah pengaktifan
lampu lalu lintas yang diawali karakter “&” dan diakhiri dengan karakter “#”. Format data
tersebut adalah data yang dikirimkan oleh master, di bawah ini adalah format data yang
dikirimkan oleh master kepada slave :
&A,B#
(Status atau Statement 0)
&A,C#
(Status atau Statement 1)
&A,E#
(Status atau Statement 2)
&D,B#
(Status atau Statement 3)
Data format di atas dapat dijelaskan oleh Tabel 3.1 dan pada tabel 3.2 menjelaskan simbol
yang mewakili perintah pengaktifan lampu lalu lintas dan lampu pejalan kaki.
Tabel 3.1. Format data master
Lampu pejalan kaki
Lampu lalu lintas
1
1
Jumlah karakter
Tabel 3.2. Simbol karakter data
Simbol
karakter
Merah
Merah
Kuning
Lampu
Lampu Lalu
Lampu Lalu
Pejalan Kaki
Lintas
Lintas
A
B
C
Hijau Lampu
Hijau Lampu
Lalu Lintas
Pejalan Kaki
D
E
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
47
Sedangkan bagian slave juga memiliki format data untuk dikirimkan menuju
master, data yang dikirimkan oleh slave sejumlah 3 karakter. Paket data tersebut terdiri
dari simbol – simbol yang mewakili data penghitungan jumlah pejalan kaki yang
menyeberang, awalan karakter dan akhiran karakter sama seperti data yang dikirimkan
oleh master menuju slave. Format data yang dikirimkan oleh slave kepada master adalah
sebagai berikut :
&Y#
(Status orang)
&T#
(Status Tombol)
&F#
(Status jumlah orang)
Data format di atas dapat dijelaskan dalam Tabel 3.3 dan pada tabel 3.4 menjelaskan
simbol yang dikirimkan oleh slave.
Tabel 3.3. Format data slave
Pengaktifan sensor orang / Tombol /
Penghitungan jumlah pejalan kaki
Jumlah karakter
1
Tabel 3.4. Simbol data
Simbol
Sensor orang aktif
Tombol aktif
Jumlah orang = 5
Y
T
F
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
48
3.3.
Perancangan hardware Sistem Pengatur Lampu Pejalan Kaki
3.3.1. Solar Cell
Perhitungan FF (Fill Factor) pada panel surya (berdasarkan persamaan 2.2)
(
FF =
.
FF =
.
(
.
:
)
.
)
.
. – (
FF =
)
.
.
.
FF =
= 0.81834
.
Perhitungan efisiensi pada panel surya (berdasarkan persamaan 2.1) :
100 %
ղ=
ղ=
.
.
.
100 %
.
ղ = 13.597 %
Perancangan supply arus yang dapat diberikan oleh solar cell :
I.maks solar cell
=
0,58 A
V.maks solar cell
=
17,2 V
P.maks solar cell
=
9.976 Watt
Supply untuk :
1. Accu (Accumulator)
Kapasitas 4 Ah (Ampere Hour) membutuhkan arus pengisian 10%
dari kapasitas accu saat kondisi pengisian penuh dari kondisi
kosong.
I.Accu (maks) =
4
= 0.4
baterai ketika dari keadaan kosong)
V.Accu (maks) = 12 V
P.Accu (maks) = 4.8 Watt
(Untuk pengisian full
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
49
2. Arduino (14 buah pin digital)
Setiap pin I/O digital memiliki kapasitas maksimal arus sebesar 40
mA atau sebesar 0.04 A.
I.maks = 0.04 A x 14 buah pin = 0.56 A (Jika digunakan
semua pin I/O secara bersamaan)
V.maks = 5 V
P.maks = 2.8 Watt
3.3.2. Rangkaian Sensor Infrared
Gambar 3.5. Rangkaian schematic mikrokontroler dengan sensor infrared RX dan TX.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
50
3.3.3. Embedded Module Serial RF Transceiver Shield
Gambar 3.6. Rangkaian schematic mikrokontroler dengan modul EMS RF Transceiver.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
51
3.3.4. Mikrokontroler
Mikrokontroler atmega328 digunakan untuk menerima dan kemudian mengolah
data digital yang telah dihasilkan oleh bagian sensor infrared. Data tersebut kemudian
diproses untuk menjalankan sistem pengaturan pada lampu pejalan kaki dan lampu lalu
lintas. Mikrokontroler mengatur timer lama lampu lalu lintas dan lampu pejalan kaki
menyala, dan kemudian mengatur komunikasi antara lampu lalu lintas yang satu dengan
yang lainnya (yang berada pada sisi lainnya di jalan lurus 2 arah). Dengan supply tegangan
dari solar charge controller (yaitu dari panel surya) sebesar 12 V. Rangkaian schematic
mikrokontroler atmega328 ditunjukkan pada Gambar 3.9 serta pembagian pin atau port
terdapat pada Tabel 3.5. Pada Gambar 3.7 menunjukan rancangan rangkaian
mikrokontroler compatible arduino uno menggunakan atmega328.
Tabel 3.5. Tabel pembagian pin / port dalam mikrokontroler
Nama masukan / keluaran
Pin yang digunakan
Keterangan
Sensor infrared (TX)
Pin digital 2
Output
Sensor infrared (RX)
Pin digital 3
Input
Buzzer
Pin digital 7
Output
Push button
Pin digital 5
Input
IC 74HC595 (shift register)
Pin digital 6, 8, 10
Output
EMS RF Transceiver
Pin digital 4,9, ISP
Output dan Input
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
52
Gambar 3.7. Rangkaian schematic minimum system mikrokontroler
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
53
3.3.5. Perancangan LED Traffic Light dan Lampu Pejalan Kaki Portable
Perancangan hardware untuk lampu lalu lintas dan lampu pejalan kaki portable
dalam satu sistem pengatur, terdiri dari 2 buah IC shift register yaitu IC 74HC595, dan 2
buah IC driver LED yaitu IC uln2803. Dengan rancangan pada satu output driver (yaitu
uln2803) terdiri atas 4 buah LED yang dihubungkan secara paralel. Perancangan untuk
lampu lalu lintas menggunakan 1 buah IC shift register 74HC595 dan 1 buah IC driver
LED uln2803. Lampu lalu lintas warna merah dengan 3 buah pin output driver, sehingga
terdapat 12 buah LED yang terhubung secara paralel. Kemudian lampu lalu lintas warna
kuning 2 buah pin output driver dengan 8 buah LED, dan yang terakhir lampu lalu lintas
warna hijau menggunakan 3 buah pin output driver dengan 12 buah LED. Perancangan
rangkaian lampu pejalan kaki dan desain 3D ditunjukkan pada Gambar 3.8, Gambar 3.9,
Gambar 3.10, Gambar 3.11, Gambar 3.12, Gambar 3.13, Gambar 3.14, Gambar 3.15, dan
Gambar 3.16. Dengan perhitungan untuk nilai resistor, didapatkan nilai R pada setiap
output driver sebesar :
Merah (APILL)
:
R=(
.
)
= 40 Ω
Pada perancangan prototip hambatan yang digunakan adalah 39 Ω (yang terdapat di
pasaran).
Nilai resistor di atas berlaku untuk ketiga output dari port driver.
Kuning (APILL)
:
R=
.
(
)
= 35 Ω
Pada perancangan prototip nilai resistor yang digunakan adalah 33 Ω (sesuai nilai resistor
di pasaran).
Nilai resistor di atas berlaku untuk kedua output dari port driver.
Hijau (APILL)
:
R=
.
(
)
= 18,75 Ω
Pada perancangan prototip nilai resistor yang digunakan adalah 20 Ω (sesuai nilai resistor
di pasaran).
Nilai resistor di atas berlaku untuk ketiga output dari port driver.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
54
Merah (Lampu Pjl.Kaki)
:
R=
.
(
)
= 40 Ω
Pada perancangan prototip nilai resistor yang digunakan adalah 39 Ω (sesuai nilai resistor
di pasaran).
Nilai resistor di atas berlaku untuk keempat output dari port driver.
Hijau (Lampu Pjl.Kaki)
:
R=
.
(
)
= 18,75 Ω
Pada perancangan prototip nilai resistor yang digunakan adalah 20 Ω (sesuai nilai resistor
di pasaran).
Nilai resistor di atas berlaku untuk keempat output dari port driver.
Perhitungan nilai – nilai resistor di atas berdasarkan pada persamaan rumus (2.4)
Gambar 3.8. Rangkaian schematic IC 74HC595 dan IC uln2803
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
55
Gambar 3.9. Rangkaian LED dan resistor Lampu lalu Lintas
Gambar 3.10. Rangkaian LED dan resistor Lampu Pejalan Kaki
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
56
Gambar 3.11. Desain 3D lampu pejalan kaki portable.
Gambar 3.12. Desain 3D box prototype (bawah)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
57
Gambar 3.13. Desain 3D penyanggah box lampu (atas)
Gambar 3.14. Desain 3D box lampu (atas)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
58
Gambar 3.15. Desain 3D Sistem pengatur lampu pejalan kaki portable (tampak kanan).
Gambar 3.16. Desain 3D Sistem pengatur lampu pejalan kaki portable (tampak kiri).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
59
3.3.6. Rangkaian Push Button
Push button atau tombol pada prototip dirancang untuk digunakan jika sensor tidak
dapat bekerja atau terjadi error pada sistem sensor (otomatis). Tombol yang digunakan dan
dirancang sebagai sistem untuk mengatur prototip lampu pejalan kaki secara manual.
Dalam prototip lampu pejalan kaki ini push button yang digunakan merupakan jenis NO
atau Normally Open.
Gambar 3.17. Rangkaian anti-bouncing push button
Perhitungan resistor dan kapasitor yang digunakan dalam rangkaian (berdasarkan
persamaan 2.5)
=
:
1
2
Ditentukan R sebesar 120 kΩ dan kapasitor 6,8 uF, maka T untuk anti-bouncing sebesar :
=
1
2 . 120 . 6,8
T = 0.195 s atau 195 ms
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
60
3.3.7. Rangkaian Buzzer Sebagai Indikator
Buzzer dirancang sebagai indikator atau alarm peringatan ketika ada pejalan kaki yang
sedang menyeberang jalan lurus 2 arah (bukan persimpangan). Transistor NPN digunakan
sebagai saklar atau switch dalam rangkaian buzzer pada prototip ini. Hambatan diperlukan
untuk membatasi arus yang masuk melalui common base dari pin output mikrokontroler.
Tegangan input untuk angkaian buzzer sebesar 5 V. Gambar 3.15 menunjukan rangkaian
buzzer lengkap dengan hambatan untuk membatasi arus yang masuk menuju kaki base
transistor BC547. Terdapat dioda (menggunakan seri 1N4007) untuk mengamankan atau
menjaga transistor dari tegangan yang berlebih.
Gambar 3.18. Rangkaian buzzer
Perhitungan nilai hambatan dapat dihitung menggunakan persamaan menurut hukum ohm,
yaitu :
R=
dimana Tegangan input sebesar 5 V dan arus yang masuk dari mikrokontroler maksimal
40 mA. Maka,
R=
.
= 125 Ω
Nilai resistor yang digunakan adalah 120 Ω (sesuai nilai resistor di pasaran).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB IV
HASIL DAN PEMBAHASAN
Pada bab ini akan membahas tentang implementasi dari perancangan pada bab 3
serta analisis dari data dan hasil pengujian sistem yang telah dilakukan. Pengujian sistem
berfungsi untuk menunjukkan kinerja sistem berjalan dengan baik atau tidak. Pengambilan
data terdiri atas pengambilan data solar cell terhadap waktu, data sensor infrared dan data
energi yang dibutuhkan untuk mengoperasikan satu sistem secara lengkap. Berdasarkan
data – data tersebut dapat dilakukan analisis terhadap proses atau kinerja sistem secara
lengkap, sehingga dapat ditarik kesimpulan akhir dari pembuatan tugas akhir ini.
4.1.
Implementasi Lampu Pejalan Kaki Portable
4.1.1. Bentuk Fisik dan Konsep Kerja Lampu Pejalan Kaki Portable
Hasil perancangan lampu pejalan kaki portable ditunjukan pada Gambar 4.1.
Terdapat beberapa bagian yaitu bagian penyangga bawah yang akan ditempatkan oleh box
sistem pengatur dan box sensor, lalu tiang penyangga lampu, box rangkaian lampu LED
beserta dengan tempat untuk solar cell atau panel surya, seperti yang ditunjukkan oleh
Gambar 4.2.
Gambar 4.1. Lampu Pejalan Kaki Portable dengan Sumber Energi Mandiri Secara
Keseluruhan
61
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
62
(a)
(b)
(c)
Gambar 4.2. (a) Bagian Box Lampu Pejalan Kaki dan APILL (LED) , (b) Bagian Tiang
Penyangga, (c) Bagian Penyangga Bawah (Tempat untuk Box Sistem Pengatur).
Dalam box LED terdiri atas rangkaian LED warna merah dan hijau untuk lampu pejalan
kaki dan rangkaian LED berwarna merah, kuning, dan hijau untuk lampu APILL. Pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
63
Gambar 4.3. ditunjukkan salah satu rangkaian LED yang digunakan dalam lampu pejalan
kaki dan lampu APILL.
Gambar 4.3. Gambar Rangkaian LED Lampu (tampak atas dan tampak samping).
Rangkaian LED untuk lampu pejalan kaki terdiri dari 12 buah LED untuk setiap warna
merah dan hijau. Sedangkan untuk lampu APILL terdiri dari 9 buah LED untuk setiap
warna merah dan hijau, dan 6 buah LED untuk warna kuning. Untuk setiap 1 pin header
pada rangkaian LED tersebut, mewakili 3 buah LED yang diparalel dan diseri dengan 1
buah resistor sebesar 220 ohm. Satu pin header yang dihubungkan seri dengan resistor
adalah input dari rangkaian driver dan SIPO. Satu pin header pada sisi satunya adalah
sebagai selektor atau enable untuk pengaktifan warna lampu yang menyala.
Rangkaian selektor yang dimaksud adalah rangkaian tambahan yang dirancang,
dikarenakan driver yang digunakan dalam sistem aktif rendah, sehingga harus ada yang
mengaktifkan LED dengan logika high, sehingga LED akan menyala. Dengan alasan
tersebut dirancanglah rangkaian selektor yang terdiri dari transistor NPN, potensiometer,
dan resistor seperti yang ditunjukkan pada Gambar 4.4. di bawah ini. Pada lampiran L2
ditunjukkan schematic rangkaian selektor yang dirancang menggunakan potensiometer ,
dan transistor NPN dengan seri TIP3055.
Gambar 4.4. Bentuk Fisik Rangkaian Selektor.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
64
Rangkaian selektor menggunakan transistor NPN, resitor 220 ohm, dan potensiometer 10
kΩ (namun yang digunakan sebesar 5 kΩ), dan 3 buah pin header yang digunakan sebagai
input, output dan supply. Input yang dimaksudkan adalah logika yang dihasilkan dan
diprogram melalui mikrokontroler. Sedangkan output adalah yang dihubungkan dengan pin
header pada rangkaian LED yang telah dijelaskan pada paragraf sebelumnya. Untuk
tegangan supply pada rangkaian selektor adalah sebesar 12 V. Tegangan supply akan
memberikan power untuk rangkaian selektor dan ketika input dari mikrokontroler bernilai
high maka output juga bernilai high dan akan menyalakan rangkaian LED. Rangkaian
selektor ini memiliki persamaan dengan saklar, yang akan bernilai high atau low saat
diaktifkan dan tidak aktif.
Alasan lainnya penambahan rangkaian ini juga dikarenakan mempertimbangkan
kemampuan mikrokontroler dalam menerima langsung tegangan yang disupply dari
rangkaian driver dan SIPO yang melewati rangkaian LED terlebih dahulu. Oleh karena itu,
dengan pertimbangan – pertimbangan di atas dibuat dan dirancang tambahan rangkaian
selektor tersebut.
Gambar 4.5. Rangkaian Driver dan SIPO (tampak atas dan tampak samping).
Rangkaian driver dan SIPO terdiri dari komponen IC shift register dengan seri
74HC595 dan IC uln2803 (komponen driver). IC 74HC595 mendapatkan supply dari
mikrokontroler, supply data bilangan biner yang akan digunakan untuk output pada
rangkaian LED. Output dari 74HC595 akan menjadi input untuk driver uln2803, yang
kemudian akan menyuplai semua rangkaian LED. Kedua komponen ini membutuhkan
tegangan supply yang berbeda yaitu 5 V untuk IC 74HC595 dan 12 V untuk port com pada
IC uln2803.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
65
B
A
C
D
E
F
Gambar 4.6. Rangkaian Minimum System.
Pada Gambar 4.6. diatas menunjukkan gambar rangkaian minimum system yang terdiri dari
6 bagian yaitu :
A. Output supply 12 V dan 5 V.
B. Rangkaian regulator tegangan.
C. Tegangan supply untuk minsis.
D. Pin out digital 0 – 7.
E. Pin out analog A0 – A5.
F. Pin out digital 8-13.
Mikrokontroler yang digunakan dalam sistem pengatur adalah minimum system buatan
yang compatible dengan arduino uno. Sistemnya sama dengan mikrokontroler arduino uno,
hanya saja penampilan hardware merupakan buatan manual oleh penulis. Mikrokontroler
lah yang menjasi supply untuk semua rangkaian dan input bagi rangkaian LED , rangkaian
driver SIPO dan rangkaian selektor.
Kondisi awal atau default sistem lampu pejalan kaki dan lampu APILL adalah
merah untuk lampu pejalan kaki dan hijau untuk lampu APILL. Ketika sensor mendeteksi
keahdiran orang (pejalan kaki) yang ingin menyeberang, maka sensor bagian receiver akan
mengirimkan perintah kepada mikrokontroler, dan kemudian mikrokontroler akan
memproses program yang telah ditentukan. Pejalan kaki yang akan menyebrang jalan harus
menunggu selama 20 detik untuk delay perubahan antara lampu merah pejalan kaki
menjadi lampu hijau pejalan kaki. Setelah 20 detik maka lampu pejalan kaki akan menjadi
hijau dan lampu APILL akan berwarna merah selama 30 detik. Setelah 30 detik habis
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
66
maka lampu pejalan kaki akan kembali menjadi warna merah dan lampu APILL akan
berwarna kuning terlebih dahulu selama 5 detik, lalu kembali ke keadaan awal yaitu
berwarna merah.
4.2.
Pengujian Panel Surya (Solar Cell)
4.2.1. Pengujian Solar Cell Tanpa Beban (Open Circuit)
Pengujian solar cell atau panel surya saat open-circuit yaitu saat panel surya tidak
terhubung dengan beban, baik accu maupun rangkaian sistem. Pada kondisi ini tegangan
output solar cell mencapai titik maksimalnya (open-circuit voltage), seperti yang
ditunjukkan oleh tabel 2.1. Pengujian panel surya dilakukan mulai pukul 08.31 WIB
sampai dengan pukul 16.43 WIB di lapangan hall selatan kampus 3, Universitas Sanata
Dharma. Pengambilan data menggunakan bantuan data logger, sehingga proses
pengambilan data terjadi setiap 12 detik sekali yang mengacu pada lampiran L2. Dari data
tersebut penulis membuat grafik untuk menunjukkan bahwa terdapat perbedaan tegangan
output yang dihasilkan oleh panel surya saat terhubung dengan beban atau tidak. Gambar
4.7. di bawah ini merupakan grafik tegangan output panel surya terhadap waktu (detik)
tanpa ada beban (open-circuit voltage).
Grafik Tegangan Output Panel Surya Terhadap
Waktu (Tanpa Beban)
Tegangan Output (V)
25
20
15
10
5
0
0
2500
5000
7500 10000 12500 15000 17500 20000 22500 25000 27500 30000
Waktu (detik)
Gambar 4.7. Grafik Tegangan Output Panel Surya Terhadap Waktu (open-circuit).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
67
Pada Gambar 4.7. menunjukkan tegangan yang dihasilkan oleh panel surya stabil,
,emyesuaikan dengan intensitas sinar matahari yang ditangkap oleh panel surya tersebut.
Pengambilan sampel data tegangan ouput untuk grafik di atas dimulai sekitar pukul 08.31
WIB. Tegangan output yang dihasilkan oleh panel surya saat pertama diuji adalah sebesar
18.77 V. Kemudian tegangan output semakin meningkat secara stabil sesuai dengan
intensitas sinar matahari yang ditangkap oleh panel surya. Intensitas sinar matahari yang
ditangkap secara maksimal akan menghasilkan tegangan output maksimal pada panel
surya, sesuai dengan tabel spesifikasi open-circuit voltage dalam tabel 2.1. Intensitas sinar
matahari yang stabil dan tingkat kecerahan yang stabil mempengaruhi panel surya dalam
menghasilkan tegangan keluaran yang maksimal dan stabil. Selain pengaruh intensitas
cahaya matahari, pengambilan data yang bersifat kontinyu dalam waktu per detik juga
mempengaruhi data tegangan output yang lebih terlihat stabil, seperti yang ditunjukkan dan
terlihat pada Gambar 4.7 di atas.
Intensitas sinar matahari berbanding lurus dengan tegangan output yang dihasilkan
oleh panel surya, ketika intensitas cahaya matahari yang ditangkap oleh panel surya tinggi
maka tegangan output panel surya akan besar. Dapat dilihat pada grafik di Gambar 4.7.
terdapat satu titik maksimal dimana cahaya matahari yang ditangkap oleh panel
menghasilkan tegangan output yang maksimal yaitu pada titik 20.74 V pada pukul 12.39
WIB. Pada jam tersebut intensitas sinar matahari yang ditangkap oleh panel surya
maksimal sehingga menghasilkan tegangan output yang maksimal, dengan kondisi tanpa
ada beban.
4.2.2. Pengujian Solar Cell dengan Beban (Operating Optimum)
Panel surya atau solar cell memiliki spesifikasi tegangan output yang berbeda saat
terdapat beban dan tidak. Beban yang dihubungkan dengan panel surya saat pengujian ini
adalah accu atau accumulator dengan spesifikasi tegangan sebesar 12 V dan kapasitas arus
sebesar 7.2 AH (Ampere Hour). Panel surya mengisi accu saat kapasitas tegangan sudah
tidak penuh. Pengujian solar cell ini dilakukan sekitar pukul 10.00 WIB sampai dengan
pukul 16.00 WIB di lapangan hall selatan kampus 3, Universitas Sanata Dharma.
Pengambilan data diambil menggunakan bantuan data logger, sehingga pengambilan data
berlangsung setiap 12 detik sekali yang mengacu pada lampiran L2. Dari banyak data
tersebut penulis mengambil beberapa sampel setiap kenaikan 25 menit untuk dimasukkan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
68
ke dalam grafik di bawah ini. Pada gambar 4.8 ditunjukkan grafik tegangan output panel
surya terhadap waktu, ketika proses pengisian accu.
TEGANGAN OUTPUT (V)
GRAFIK TEGANGAN OUTPUT SOLAR CELL
TERHADAP WAKTU
13,70
13,60
13,50
13,40
13,30
13,20
13,10
13,00
12,90
12,80
12,70
VOUT menurun karena
cuaca sedikit mendung
0
25
50
75
100 125 150 175 200 225 250 275 300 325 350 375
WAKTU ( menit)
Gambar 4.8. Grafik Tegangan Output Panel Surya Terhadap Waktu.
Pada Gambar 4.8. terlihat bahwa tegangan output dari panel surya stabil, dalam proses
untuk menyuplai beban (accu). Tegangan output akan semakin besar ketika intensitas sinar
matahari semakin tinggi, akan tetapi tidak akan melebihi tegangan output panel surya atau
operating optimum voltage yang ditunjukkan oleh tabel 2.1. Tegangan output yang
dihasilkan oleh panel surya berbanding lurus dengan intensitas sinar matahari yang
ditangkap oleh panel.
Tegangan output yang diambil untuk sampel grafik di atas mulai dari pukul 10.43
WIB dengan selang waktu 25 menit sekali. Pada 25 menit pertama tegangan output yang
dihasilkan oleh panel surya sebesar 12.78 V, kemudian 25 menit berikutnya tegangan
semakin besar menjadi 12.99 V sampai menit ke 100. Akan tetapi tegangan output sempat
sedikit menurun pada menit ke 125 yaitu sekitar pukul 12.30 WIB. Hal tersebut
dikarenakan pengambilan sampel data yang penulis ambil tidak per 12 detik, namun per 25
menit sekali, maka perubahan tegangan output pada panel surya terlihat begitu besar dan
drastis. Selain alasan tersebut hal utama yang mempengaruhi adalah intensitas sinar
matahari yang tertutup awan mempengaruhi perubahan tegangan output yang diahasilkan
oleh panel surya. Setelah penurunan tersebut tegangan output panel surya kembali
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
69
meningkat sampai intensitas sinar matahari di sore hari mulai berkurang dan tegangan
output menurun secara stabil, seperti yang terlihat pada grafik di atas.
Terlihat pada Gambar 4.8. tegangan output panel surya paling maksimal sebesar
13.61 V pada menit ke 250, yaitu sekitar pukul 10.44 WIB. Pada pukul 10.44 WIB sinar
matahari sedang berada pada titik maksimal sehingga panel surya dapat merubah intensitas
sinar matahari tersebut menjadi tegangan output yang maksimal untuk mengisi accu yang
setengah kosong. Pengisian tersebut berlangsung selama sekitar 6 jam, yaitu pukul 10.19
WIB sampai dengan pukul 16.06 WIB, dengan arus yang stabil yaitu sebesar 0.1 A sampai
0.5 A (sesuai dengan tabel spesifikasi 2.1 mengenai optimum operating current).
4.3.
Pengujian Alat
4.3.1. Pengujian Sensor Infrared
Pengujian sensor infrared sebagai sensor pendeteksi kehadiran orang dilakukan
dengan mengukur tegangan output pada bagian receiver bernilai high atau low. Bagian
transmitter infrared akan terus menyinari sinar infrared menuju bagian receiver infrared
dengan tegangan supply sebesar 5 V. Kemudian pada bagian receiver akan menghasilkan
tegangan
high
(mengindiaksikan
5V
/
tegangan
supply)
dan
tegangan
low
(mengindikasikan 0V). Pada bagian receiver infrared terdapat 2 port vout , yaitu port out
dan port not out. Pada port out tegangan receiver akan bernilai high ketika tidak
menangkap sinar infrared dan bernilai low ketika menangkap sinar infrared. Sedangkan
port not out bernilai kebalikan daripada port out, seperti pada logika digital. Di bawah ini
adalah tabel 4.x. yang merupakan hasil dari pengujian dan pengambilan data sensor
infrared sebagai pendeteksi kehadiran orang atau pejalan kaki. Jarak yang penu diuji
adalah 1 cm sampai dengan 100 cm dengan port out sebagai keluaran atau output yang
mengacu pada lampiran L4.
`Tabel 4.1. Tabel Pengujian Sensor Infrared atau Sensor Pendeteksi Pejalan kaki.
Jarak
(cm)
1
2
3
4
5
Ada Pejalan Kaki
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Jarak
(cm)
27
28
29
30
31
Ada Pejalan Kaki
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
70
Tabel 4.1. (lanjutan) Tabel Pengujian Sensor Infrared atau Sensor
Pendeteksi Pejalan Kaki
Jarak
(cm)
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
Ada Pejalan Kaki
Tidak terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Jarak
(cm)
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
Ada Pejalan Kaki
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
Tidak terdeteksi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
71
Pada pengujian sensor infrared yang dilakukan pada jarak – jarak tertentu
didapatkan data yang mengindikasikan terdeteksi atau tidaknya kehadiran orang atau
pejalan kaki. Bagian transmitter infrared akan terus memberikan sinar infrared kepada
bagian receiver infrared, yang kemudian bagian receiver akan menerima sinar infrared
yang berbentuk sinyal analog dan merubahnya menjadi sinyal digital high atau low.
Pengujian sensor dilakukan di dalam ruangan tanpa adanya halangan media apapun, dan
dengan posisi transmitter dan receiver yang saling berhadapan lurus. Media yang
menghalangi akan mempengaruhi sensor dalam mendeteksi kehadiran pejalan kaki, selain
itu posisi sudut dalam penyinaran sinar infrared menuju bagian receiver juga
mempengaruhi daya tangkap receiver.
Pada Tabel 4.1. di atas terlihat bahwa bagian receiver infrared akan menghasilkan
logika keluaran high saat kondisi tidak menangkap sinar infrared dari bagian transmitter,
dengan kata lain mengindikasikan kehadiran seorang pejalan kaki. Pada jarak 1 cm – 6 cm
pengujian bagian receiver sensor belum dapat mendeteksi kehadiran pejalan kaki atau bisa
disebut belum aktif. Setelah jarak 6 cm sensor infrared (bagian receiver) sudah dapat
menangkap dan mendeteksi saat ada atau tidaknya kehadiran orang (pejalan kaki). Pada
jarak 7 cm sampai dengan 45 cm sensor infrared bekerja secara maksimal dan baik, bagian
receiver infrared menangkap sinar infrared dengan maksimal dan mendeteksi kehadiran
pejalan kaki dengan baik dan benar. Jarak 7 cm – 45 cm logika output yang dihasilkan oleh
bagian receiver infrared masih stabil dan baik. Setelah jarak 45 cm, yaitu jarak 46 cm
sampai dengan 80 cm, daya tangkap receiver mulai sedikit lemah sehingga diperlukan
perubahan posisi sudut penyinaran dari bagian transmitter infrared
menuju receiver
infrared, untuk mendapatkan hasil logika output yang sesuai saat mendeteksi pejalan kaki.
Hal tersebut yang sedikit menjadi hambatan atau error yang terjadi dalam pengujian sensor
infrared (pendeteksi kehadiran pejalan kaki) ini. Sedangkan pada jarak >80 cm bagain
receiver infrared sudah tidak dapat mendeteksi kehadiran pejalan kaki, dengan maksud
tidak dapat mengindikasikan logika high atau low, walaupun sudah dilakukan perubahan
posisi sudut penyinaran dari bagian transmitter. Maka dari pengujian tersebut di atas
didapatkan jarak efisien untuk peletakkan sensor infrared adalah sekitar 7 cm – 45 cm,
jarak yang efektif untuk kedua bagian sensor infrared dalam mendeteksi kehadiran pejalan
kaki.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
72
4.3.2. Pengujian Rangkaian Shift Register
Pengujian rangkaian shift register atau SIPO (Serial Input Paralel Output)
dilakukan untuk mengetahui tegangan keluaran yang dihasilkan oleh IC 74HC595 sudah
sesuai dengan datasheet atau tidak. IC 74HC595 disini bertugas untuk meyuplai data serial
yang telah diprogram dan ditentukan oleh mikrokontroler.
Pengujian dilakukan dengan mengukur tegangan keluaran pada 8 buah port output
pada saat mengeluarkan data low atau high. Tegangan keluaran saat data bernilai high atau
berlogika 1 adalah sebesar 3.5 V dan pada saat menghasilkan data berlogika 0 atau low
menghasilkan tegangan output sebesar 0.01 V. Sedangkan pada datasheet dengan tegangan
keluaran saat berlogika high sebesar 3.84 V minimal dan saat berlogika low sebesar 0.1 V
maksimal. Terdapat sedikit perbedaan tegangan keluaran antara datasheet dengan
rangkaian real. Hal tersebut menyebabkan sedikit error yang membuat kinerja rangkaian
shift register kurang maksimal dalam menyuplai data menuju driver LED. Akan tetapi,
rangkaian shift register ini sudah bekerja dengan baik dalam menggeser setiap bit data
yang dimasukkan.
4.3.3. Pengujian Rangkaian Driver
Pengujian rangkaian driver dilakukan untuk mengetahui tegangan output yang
dihasilkan oleh IC uln2803 sudah bekerja dengan baik atau tidak. Pengujian dan
pengambilan data dilakukan dengan mengamati tegangan keluaran yang dihasilkan oleh
driver atau IC uln2803 saat bekerja dengan tegangan pada port com sebesar 12 V, dan
kemudian dibandingkan dengan datasheet yang sudah terlampir.
Pengukuran pada port output IC uln2803 (8 buah kakinya) dilakukan menggunakan
multimeter digital dan didapatkan tegangan keluaran pada ke-8 port out-nya sebesar 0.92 –
1.65 V. Sedangkan tegangan keluaran menurut datasheet adalah sebesar 0.9 – 1.6 V,
dengan itu dapat disimpulkan bahwa IC uln2803 sudah bekerja dengan baik.
4.3.4. Pengujian Rangkaian LED
Pengujian rangkaian LED dalam setiap warna lampu APILL dan Lampu Pejalan
Kaki dilakukan untuk mengetahui kinerja rangkaian LED dengan supply tegangan 5V dan
arus maksimal 20 mA dapat aktif dan menyala secara maksimal atau tidak. Pengujian juga
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
73
ditujukkan untuk mengetahui kebutuhan arus total dalam menyalakan atau mengaktifkan
rangkaian LED pada setiap warna lampu pejalan kaki dan APILL.
Pengujian rangkaian LED dilakukan dengan menguji setiap port input dari
rangkaian driver menuju barisan LED yang tersusun secara paralel. Dengan diberikan
tegangan com pada IC driver sebesar 12 V, dapat menyuplai rangkaian LED dengan total
12 buah LED yang dihubung secara paralel. Satu port rangkaian LED dengan arus total
0.056 A dapat mengaktifkan seluruh LED untuk 1 port rangkaian dengan LED 4 buah
yang terhubung secara paralel dan 1 buha resistor sebesar 220 ohm. Arus maksimal
menurut datasheet untuk pengaktifan LED sebesar 65 -75 mA (suggestion operating
voltage). Maka menurut data tersebut rangkaian LED sudah bekerja dengan baik.
4.4.
Pengujian Accumulator
Accumulator yang digunakan dalam sistem memiliki kapasitas tegangan keluaran
sebesar 12 V dan kapasitas arus keluaran sebesar 7.2 AH (ampere hour). Pengujian
accumulator dilakukan untuk mendapatkan berapa lama waktu saat accu menyuplai sistem
secara keseluruhan dengan kapasitas arus dan tegangan tersebut. Dengan kapasitas arus
accu sebesar 7.2 AH accu dapat menyuplai sistem secara keseluruhan selama kurang lebih
4 hari. Arus total untuk pengaktifan rangkaian lampu LED adalah 0.056 A , dengan
pengaktifan LED yang dilakukan secara bergantian, maka konsumsi arus untuk
pengaktifan tersebut tidak akan boros. Dengan kapasitas arus keluaran accu sebesar 7.2
ampere hour , accu tersebut dapat menyuplai sebesar 7.2 ampere setiap jam (maksimal)
untuk satu sistem. Namun dengan penggunaan pengaktifan LED secara bergantian dan
konsumsi arus setiap LED sebesar 0.05 – 0.065 A maka dengan kapasitas accu sebesar 7.2
AH tersebut dapat menyuplai sekaligus menggantikan solar cell sebagai sumber energi
selama kurang lebih 110.769 jam (dibulatkan menjadi 111 jam), yaitu sekitar 4 hari, jika
digunakan selama 24 jam/1 hari. Maka dapat disimpulkan bahwa accu mampu untuk
menggantikan panel surya sampai 4 hari lebih, karena penggunaan accu tidak digunakan
selama 24 jam penuh untuk setiap 1 harinya.
4.5.
Pengujian Sistem Pengatur dengan Solar Cell
Pengujian Sistem pengatur dengan sumber energi mandiri atau solar cell, dilakukan
pad apukul 14.30 WIB di ruangan terbuka (halaman kebun depan kos) dengan keadaan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
74
cuaca yang cerah, dengan intensitas sinar matahari yang baik. Pengujian dilakukan dengan
menggunakan solar cell sebagai supply dari sistem dan accu yang sedikit kosong.
Tegangan output dari panel surya sebesar 12.19 V menyuplai sistem dan accu. Tabel 4.2.
merupakan tabel pengambilan data tegangan rangkaian selektor yang telah disupply oleh
sumber energi mandiri.
Tabel 4.2. Tabel Pengujian Sistem Pengatur (Lampu APILL)
V.selektor 1
V selektor 2
V. Selektor 3
Ada orang (V)
5
0.4
390 mV
Tidak ada orang (V)
300 mV
0.4
5
VOUT Panel
Surya
12.91 V
Pada Tabel 4.2. ditunjukkan data tegangan yang dihasilkan oleh panel surya dan rangkaian
selektor yang merupakan tegangan pada rangkaian LED pada rangkaian kesatuan lampu
APILL (merah, kuning, hijau). Dikarenakan accu yang digunakan hanya sedkit kosong
maka untuk pengisian accu sampai penuh tidak diperlukan waktu yang lama dan tidak
terlalu memebebani panel surya. Tegangan 5 V mengindikasikan logika high maka akan
mengaktifkan lampu yang dihubungkan dengan selektor tersbeut. Selektor 1 merupakan
rangkaian selektor untuk lampu APILL merah, selektor 2 untuk lampu APILL kuning, dan
selektor 3 untuk lampu APILL hijau.
Tabel 4.3. Tabel Pengujian Sistem Pengatur (Lampu Pejalan Kaki)
V.selektor 1
V.selektor 2
VOUT Panel Surya
Ada orang (V)
120 mV
5.09
Tidak ada orang (V)
5.23
1.7
12.85 V
Sedangkan pada Tabel 4.3. ditunjukkan bahwa tegangan yang dihasilkan oleh rangkaian
selektor tidak begitu jauh berbeda dengan sistem yang lampu APILL. Tegangan output
yang dihasilkan oleh panel surya sedikit saja berubah, dikarenakan intensitas sinar
matahari yang sedikit menurun (karena hari sudah mulai sore). Tegangan selektor 1
merupakan nilai untuk rangkaian LED lampu pejalan kaki berwarna merah dan selektor 2
adalah untuk rangkaian LED lampu pejalan kaki warna hijau. Ketika mendeteksi kehadiran
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
75
pejalan kaki maka tegangan selektor 1 akan bernilai low dan tegangan selektor 2 akan
bernilai high.
Panel surya dapat menyuplai tegangan untuk sistem dan pengisian accu sekaligus
dengan tegangan yang stabil yaitu sekitar 12 V – 17 V (sesuai dengan spesifikasi pada
Tabel 2.1). Dengan kapasitas 10 WP panel surya dapat mengoperasikan sistem pengatur,
ditambah dengan bantuan oleh rangkaian SIPO (shift register) yang menghemat
pengaktifan atau penyalaan lampu LED. SIPO membantu rangkaian LED untuk bisa
menghemat energi dengan dilakukannya pergantian aktif lampu LED, namun dengan
waktu yang cepat sehingga proses tersebut tidak terlihat oleh mata.
4.6.
Pembahasan Perangkat Lunak
Program yang dirancang untuk sistem pengatur ini sama seperti pada peracangan di
diagram alir pada bab sebelumnya. Program sudah berfungsi, namun ada sedikit perubahan
yang mengacu pada diagram alir di lampiran L5. Berikut di bawah ini akan dijelaskan
secara terperinci setiap alur – alur program mulai dari inisialisasi.
4.6.1 Inisisalisasi
Inisisalisasi program dimulai dengan menuliskan library yang dibutuhkan dalam
sistem, yaitu timer, SPI dan lainnya. Seperti yang ditunjukkan oleh list program di bawah
ini, library dari arduino uno untuk komunikasi, dan timer.
Inisialisasi timer digunakan sebagai penghitung waktu delay pada sistem, supaya hasil
lebih maksimal dan baik maka digunakan timer sebagai counter timer (delay). Inisialisasi
timer terdiri dari inisialisasi control dan count untuk penamaan setiap timer 5 detik, 20
detik, dan 30 detik. Setelah inisialisasi tersebut, dalam void setup dituliskan setting timer 1
dalam mikrokontroler.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
76
Selain itu juga terdapat inisialisasi untuk port yang digunakan sebagai input dan output dan
penamaan untuk setiap port yang digunakan tersebut.
4.6.2. Program Utama
Dalam program utama terdapat diagram alir yang utama dan subrutin sensor
pendeteksi kehadiran pejalan kaki. Pada program utama ini akan terjadi looping unutk
pemanggilan setiap subrutin yang digunakan. Ketika terdapat pejalan kaki yang ingin
menyebrang maka program utama akan memanggil subrutin sensor, dan kemudian sensor
akan memberikan output yang akan diolah oleh bagian mikrokontroler tersebut.
Maka ketika sensor mendeteksi kehadiran pejalan kaki maka rangkaian LED yang aktif
adalah bagian lampu pejalan kaki hijau dan lampu APILL merah.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
77
Jika sensor tidak berfungsi dengan baik maka akan ada pilihan lain, yaitu tombol (push
button) yang dapat menggantikan tugas sensor dalam mendeteksi kehadiran orang (pejalan
kaki). Di dalam program utama ini juga terdapat pengaturan pengiriman data pengaktifan
lampu satu menuju lampu lainnya (di sisi satu jalan). Pengaturan komunikasi yang terjadi
antara sistem pengatur 1 dengan 2 baru terjadi secara 1 arah, yaitu dari sistem pengatur 1
menuju sistem pengatur 2.
4.6.3. Subrutin Pengiriman Paket Data
Subrutin pengiriman paket data akan dipanggil dalam program utama ketika sudah
mengoperasikan terlebih dahulu perintah yang akan dikirimkan kemudian.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
78
Bagian master yang bertugas untuk mengirimkan dan mengaktifkan LED untuk sistem
pengatur 2 yang berada di sisi satu jalan lurus 2 arah. Paket data yang dikirimkan
merupakaan data pengaktifan lampu LED yang akan dinyalakan, dan sesuai dengan timer
yang ada (sesuai alur sistem).
4.6.4. Subrutin Sensor Infrared (Sensor Pendeteksi Orang)
Subrutin sensor berisi insialisasi sensor dan pengenalan atau pembacaan output
yang dihasilkan oleh sensor. Bagian subrutin sensor dipanggil dalam program utama secara
kontinyu atau terus menerus, karena untuk mendeteksi kehadiran adanya pejalan kaki atau
tidak.
Pemanggilan subrutin sensor bersifat kontinyu dan berulang – ulang, sehingga dapat
mendeteksi kehadiran pejalan kaki dalam waktu apapun. Pembacaan hasil sensor dilakukan
dengan perintah attach interrupts sebagai pendeteksi kehadiran pejalan kaki.
Ketika sensor sudah memberikan output kepada mikrokontroler maka sistem pengatur akan
mulai beroperasi sesuai dengan apa yang telah dirancang pada bab sebelumnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
79
BAB V
KESIMPULAN DAN SARAN
5.1.
Kesimpulan
Dari hasil pengujian sistem pengatur lampu pejalan kaki portable dengan sumber
energi mandiri ini, didapatkan kesimpulan :
1.
Tegangan output Panel Surya atau solar cell memiliki perbedaan saat terbebani
dan tidak terbebani.
2.
Tegangan output panel surya berbanding lurus dengan intensitas sinar matahari
yang ditangkap oleh panel.
3.
Panel surya mampu untuk menyuplai sistem pengatur sekaligus dengan
pengisian accu (selama sekitar 6 jam).
4.
Jarak efisien untuk peletakan sensor infrared adalah 7 cm sampai dengan 45
cm.
5.
Rangkaian shift register dapat bekerja dengan baik, namun tegangan keluaran
yang dihasilkan sedikit lebih kecil daripada datasheet.
6.
Rangkaian driver sudah dapat menyuplai rangkaian LED dengan tegangan
keluaran yang sesuai dengan datasheet.
7.
Rangkaian LED dapat aktif dengan tegangan com driver sebesar 12 V dan arus
sebesar 0.05 A.
8.
Accu dengan kapasitas 12 V dan 7.2 AH dapat menyuplai keseluruhan sistem
selama kurang lebih 4 hari (111 jam).
5.2.
Saran
Saran – saran untuk pengembangan sistem pengatur ini, yaitu :
1. Menyempurnakan sistem dengan sistem counting jumlah orang (pejalan kaki) yang
akan menyebrang.
2. Menyempurnakan pengiriman data secara 2 arah dengan lebih baik, dan variasi
baud rate yang berbeda.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
DAFTAR PUSTAKA
[1]
http://www.hubdat.dephub.go.id, undang – undang No. 22 Tahun 2009 tentang Lalu
Lintas dan Angkutan Jalan, diakses tanggal 2 Januari 2013.
[2]
Mujahidin.,S.T.M.T., M dan Firman A.D.K ., 2013, Implementasi Panel Surya Pada
Lampu Lalu Lintas yang Diterapkan di Simpang Malka Batam.
[3]
Bram, J.A., 2011, Rancang Bangun Prototipe Pengatur Lampu Lalu Lintas
Memanfaatkan Sensor Tekan, Skripsi, Universitas Indonesia, Jakarta.
[4]
Nughraha, Ph.D.,T dan Didik S, Dipl.-Ing, Seri Sains Energi Terbarukan ENERGI
SURYA.
[5]
Nusyirwan,ST.,M.Sc., D, Muh.M,ST.,MT dan Agustinus.S.,
Implementasi Panel
Surya yang Diterapkan pada DaerahTterpencil di Rumah Tinggal di Desa Sibuntuon,
Kecamatan Habinsaran.
[6]
Sidopekso,S dan I Made.A, 2011, Studi rancang bangun Solar charge controller
dengan indikator arus, tegangan dan suhu berbasis mikrokontroler ATMEGA 8538.,
vol XI no 1.
[7]
Heri.,S.T.M.T, J, Pengujian Sistem Pembangkit Listrik Tenaga Surya Solar Cell
Kapasitas 50 WP.
[8]
Raharjo,P, 2013., Perancangan Sistem Hibrid Solar Cell – Baterai – PLN
menggunakan PLC,Skripsi, Universitas Jember, Jember.
[9]
Kadir,A ,2013, Panduan Praktis Mempelajari Aplikasi Mikrokontroler dan
Pemrogramannya Menggunakan Arduino, ANDI Yogyakarta.
[10]
Daryanto., Drs, 2006, Pengetahuan Praktis Teknik Radio ,PT Bumi Aksara, Jakarta.
[11]
http://teknikelektronika.com/pengertian-led-light-emitting-diode-cara-kerja/ , diakses
pada 15 nov 2015 pukul 15.49.
[12]
Sadewo,A.B, 2014,
Remote Unit denganRFM12-433S untuk Sistem Telemetri
Kualitas Air Kolam Ikan, Skripsi, Universitas Sanata Dharma, Yogyakarta.
80
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
81
[13]
-----------, 2006, RF12 Universal ISM Band FSK Transceiver, HOPE RF
MICROELECTRONICS.
[14]
Murtianta,B., Modulator dan demodulator FSK, Universitas Kristen Satya Wacana,
Salatiga.
[15]
Sulistiyono,T.Y.,2004, Komparasi sistem komunikasi serial multipoint pada robot
management sampah menggunakan
I2C dan SPI, Skripsi, Universitas
Brawijaya,Malang.
[16]
Hendriawan S.T.,M.T, A, Bambang.S dan Reesa A.,S.T.M.T, Aplikasi sistem wireless
infrared untuk identitas parkir berlangganan, Politeknik Elektronika Negeri
Surabaya, Surabaya.
[17]
Widjanarka, Ir.W, 2006, Teknik Digital, Erlangga, Jakarta.
[18]
----------,2015, uln2803a Darlington Transistor Arrays, Texas Instruments.
[19]
Akbar, Z, 2012, Penentuan Ranking Berdasarkan Waktu Lomba Renang Pada
Rangkaian Push Button Berbasiskan Mikrokontroler AT89S51, Skripsi, Univ
Gunadarma, Depok.
[20]
Prabowo, P.S, Widyastuti, W, Harini, B.W, Martanto dan Tjendro, Makalah DATA
LOGGER ENERGI LISTRIK UNTUK pembangkit listrik tenaga Angin PRODUKSI
IBIKK TE USD
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L1
LAMPIRAN
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L2
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L3
Hitungan teoritis lama pengisian accumulator kosong menggunakan solar cell
:
Berdasarkan persamaan 2.3, dapat dihitung lama pengisian accumulator dengan kapasitas 7.2
AH adalah sebagai berikut
Ta =
=
.
.
:
= 12.41 Jam ≈ 12 Jam (pengisian accu oleh solar cell dari
keadaan benar – benar kosong).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L4
Data Pengujian Solar Cell Tanpa Beban
10:19:08
10:19:20
10:19:32
10:19:44
10:19:56
10:20:08
10:20:20
10:20:32
10:20:44
10:20:56
10:21:08
10:21:20
10:21:32
10:21:44
10:21:56
10:22:08
10:22:20
10:22:32
10:22:44
10:22:56
10:23:08
10:23:20
10:23:32
10:23:44
10:23:56
10:24:08
10:24:20
10:24:32
10:24:44
10:24:56
10:25:08
10:25:20
10:25:32
10:25:44
10:25:56
10:26:08
10:26:20
10:26:32
10:26:44
Waktu
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
15/4/2016
VOUT (V)
18,78
18,82
18,88
18,94
19,01
19,25
19,29
19,24
19,36
19,4
20,02
19,47
19,27
19,19
19,27
20,05
20,26
19,67
19,1
19,04
19,03
19,03
19,09
19,25
20
19,86
19,49
19,09
19
19,04
20,03
19,39
19,05
19,15
18,96
19,1
19,13
18,94
18,87
Keterangan tambahan :
Tabel data pengujian lengkap terlampir dalam lampiran khusus dalam bentuk pdf di CD.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L5
Data Solar Cell dengan Beban
Waktu
10:19:17 24/04/2016
10:19:29 24/04/2016
10:19:41 24/04/2016
10:19:53 24/04/2016
10:20:05 24/04/2016
10:20:17 24/04/2016
10:20:29 24/04/2016
10:20:41 24/04/2016
10:20:53 24/04/2016
10:21:05 24/04/2016
10:21:17 24/04/2016
10:21:29 24/04/2016
10:21:41 24/04/2016
10:21:53 24/04/2016
10:22:05 24/04/2016
10:22:17 24/04/2016
10:22:29 24/04/2016
10:22:41 24/04/2016
10:22:53 24/04/2016
10:23:05 24/04/2016
10:23:17 24/04/2016
10:23:29 24/04/2016
10:23:41 24/04/2016
10:23:53 24/04/2016
10:24:05 24/04/2016
10:24:17 24/04/2016
10:24:29 24/04/2016
10:24:41 24/04/2016
10:24:53 24/04/2016
10:25:05 24/04/2016
10:25:17 24/04/2016
10:25:29 24/04/2016
10:25:41 24/04/2016
10:25:53 24/04/2016
10:26:05 24/04/2016
10:26:17 24/04/2016
10:26:29 24/04/2016
10:26:41 24/04/2016
10:26:53 24/04/2016
VOUT (V)
10.66
10.76
10.78
10.88
10.99
11.23
11.53
11.98
12.15
12.19
12.22
12.24
12.27
12.27
12.27
12.28
12.29
12.31
12.32
12.33
12.33
12.36
12.37
12.40
12.43
12.46
12.47
12.47
12.50
12.52
12.55
12.57
12.61
12.62
12.65
12.66
12.66
12.69
12.69
Arus (A)
0.50
0.50
0.49
0.49
0.49
0.51
0.51
0.49
0.49
0.49
0.49
0.50
0.50
0.48
0.50
0.49
0.51
0.50
0.50
0.50
0.50
0.47
0.50
0.51
0.49
0.48
0.47
0.50
0.49
0.49
0.49
0.48
0.47
0.51
0.50
0.50
0.49
0.46
0.49
Daya (P)
5.37
5.38
5.24
5.37
5.43
5.47
5.47
5.83
5.98
5.99
6.05
6.06
6.13
5.88
6.10
6.01
5.99
6.20
6.17
6.17
6.13
5.79
6.20
6.28
6.07
5.97
5.81
6.20
6.11
6.19
6.14
6.00
5.90
6.45
6.37
6.28
6.19
5.80
6.12
Keterangan tambahan :
Tabel data pengujian lengkap terlampir dalam lampiran khusus dalam bentuk pdf di CD.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L6
Jarak
(cm)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
Data Pengujian Sensor Infrared (Bagian Receiver)
Ada Pejalan
Tidak Ada Pejalan Jarak Ada Pejalan Tidak Ada Pejalan
Kaki (V)
Kaki (V)
(cm)
Kaki (V)
Kaki (V)
6.33
6.33
6.33
6.33
6.33
6.33
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
6.33
6.33
6.33
6.33
6.33
6.33
6.33
6.42
6.41
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.43
6.43
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
0.03
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.42
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
6.41
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L7
Data Pengujian Panel Surya Terhadap Keseluruhan Sistem
Data ke - Vout (V) Arus (A) Daya (W) Data ke- Vout (V) Arus (A)
11.07
0.48
5.27
11.86
0.39
1
46
11.10
0.47
5.23
11.90
0.37
2
47
11.21
0.47
5.27
11.99
0.37
3
48
10.45
0.21
2.18
11.98
0.35
4
49
10.42
0.20
2.09
11.95
0.35
5
50
10.50
0.21
2.16
12.02
0.36
6
51
10.50
0.19
1.98
12.04
0.36
7
52
10.41
0.19
1.93
12.03
0.38
8
53
10.48
0.19
1.79
12.04
0.36
9
54
10.39
0.17
1.73
12.02
0.36
10
55
10.06
0.08
0.84
12.07
0.37
11
56
10.43
0.18
1.55
12.05
0.36
12
57
10.52
0.17
1.76
11.00
0.00
13
58
10.51
0.19
1.98
10.93
0.00
14
59
10.53
0.18
1.87
10.98
0.07
15
60
10.52
0.18
1.88
11.59
0.20
16
61
10.45
0.16
1.69
11.59
0.19
17
62
10.53
0.19
1.96
11.63
0.18
18
63
10.55
0.17
1.74
11.59
0.20
19
64
10.48
0.15
1.71
11.65
0.18
20
65
10.58
0.16
1.71
11.61
0.19
21
66
10.57
0.16
1.71
11.61
0.20
22
67
11.34
0.40
4.53
11.58
0.17
23
68
11.38
0.41
4.62
11.67
0.19
24
69
11.45
0.40
4.53
11.66
0.18
25
70
11.56
0.40
4.66
11.63
0.19
26
71
11.53
0.39
4.53
11.66
0.19
27
72
11.47
0.37
4.29
11.65
0.18
28
73
11.61
0.38
4.46
11.59
0.16
29
74
11.53
0.39
4.51
11.67
0.18
30
75
11.61
0.41
4.47
11.64
0.18
31
76
11.70
0.37
4.33
11.65
0.16
32
77
11.79
0.38
4.47
11.68
0.17
33
78
11.72
0.40
4.72
11.72
0.16
34
79
11.72
0.40
4.74
11.53
0.12
35
80
11.79
0.40
4.68
11.37
0.08
36
81
11.72
0.39
4.56
11.33
0.07
37
82
11.82
0.39
4.59
11.21
0.07
38
83
11.83
0.37
4.41
11.29
0.07
39
84
11.86
0.39
4.64
11.27
0.07
40
85
11.87
0.37
4.41
11.21
0.07
41
86
11.90
0.40
4.79
11.67
0.16
42
87
11.84
0.41
4.83
11.65
0.18
43
88
11.87
0.40
4.75
11.63
0.17
44
89
11.93
0.36
4.25
11.58
0.17
45
90
Daya (W)
4.66
4.42
4.45
4.14
4.24
4.31
4.35
4.56
4.30
4.39
4.48
4.32
0.00
0.00
0.76
2.35
2.19
2.04
2.34
2.15
2.16
2.28
1.95
2.25
2.16
2.24
2.18
2.11
1.82
2.05
2.09
1.91
1.98
1.84
1.33
0.92
0.76
0.76
0.82
0.75
0.75
1.88
2.05
1.95
1.95
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L8
A
START
TUNDA -1
INISIALISASI
PORT I/O
N
TUNDA = 0
Y
INISIALISASI
KOMUNIKASI
BACA STATUS /
STATE SLAVE
SET DEFAULT
MERAH SEMUA
SELAMA 2 SEKON
(MASTER)
SET TUNDA = 30 S
KIRIM S0 KE SLAVE
APILL MERAH, PJL
KAKI HIJAU
APILL HIJAU,PJL
KAKI MERAH
(MASTER)
KIRIM S3 KE SLAVE
KIRIM S2 KE SLAVE
SETTING
SENSOR
ORANG
TUNDA -1
CEK SENSOR ORANG
N
TUNDA = 0
BACA STATUS /
STATE SLAVE
Y
APILL KUNING, PJL KAKI
MERAH 5 SEKON
Y
SENSOR ORANG
AKTIF
CEK ORANG
N
CEK TOMBOL
Y
APILL HIJAU,PJL
KAKI MERAH
(MASTER)
N
AKTIF
SET TUNDA 20 S
KIRIM S2 KE SLAVE
A
END
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L9
Listing Program Keseluruhan
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
#include <SPI.h>
#define RFSS 9
#define RFIRQ 4
#include <avr/io.h>
#include <avr/interrupt.h>
int lampu[14] = {1,2,4,8,16,32,64,128,64,32,16,8,4,2};
int rx = 2; //pin interrupt 0
int pb = 3; //pin interrupt 1
int DS = 13; // data led APILL
int PJL = A0; // data led pjl kaki
int latchPin = 5; // SHCP
int clockPin = 6; // STCP
int LR = 7; //bit enable merah APILL
int LY = 8;//bit enable kuning
int LG = 10;//bit enable hijau APILL
int PR = 11;//bit enable merah pjl kaki
int PG = 12;//bit enable hijau pjl kaki
int bz = A2; //buzzer warning
int s,t,i;
char K,H,M;
char Data;
char buff[3]; //data enable yg dikirim master
char paket[3]; // data yg diterima master mengenai sensor di slave
volatile int counta;
volatile int countb;
volatile int countc;
int controla = LOW;
int controlb = LOW;
int controlc = LOW;
int r=0; //variabel hitung orang
int a=0;
int b=0;
int c=0;
void setup() {
Serial.begin(9600);
pinMode(rx, INPUT);
pinMode(pb, INPUT);
pinMode(bz, OUTPUT);
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(DS, OUTPUT); //data biner apill
pinMode(PJL, OUTPUT);//data biner pjl kaki
pinMode(LR, OUTPUT);
pinMode(LY, OUTPUT);
pinMode(LG, OUTPUT);
pinMode(PR, OUTPUT);
pinMode(PG, OUTPUT);
//kondisi awal default
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L10
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
64.
65.
66.
67.
68.
69.
70.
71.
72.
73.
74.
75.
76.
77.
78.
79.
80.
81.
82.
83.
84.
85.
86.
87.
88.
89.
90.
91.
92.
93.
94.
95.
96.
97.
98.
digitalWrite(LR, LOW);; //kondisi default
digitalWrite(LY, LOW);
digitalWrite(LG, HIGH);
digitalWrite(PR, HIGH);
digitalWrite(PG, LOW);
cekkom();
//sensor infrared
attachInterrupt(0, rutin, FALLING);
//tombol
attachInterrupt(1, rutin, FALLING);
//inisialisasi timer
cli();
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 49911; //65536-(40uS/ (1/16MHz*1024))
TCCR1B |= (1 << CS12)|(1 << CS10); //prescaler 1024
TIMSK1 |= (1 << TOIE1); //untuk enable timer1 overflow interrupt
sei(); //enable semua interupsi
}
ISR(TIMER1_OVF_vect) // interupsi servis routine timer1
{
TCNT1=49911;
if(controla==HIGH)
{
counta++;
if(counta==5)
{
a=1;
counta=0;
}
}
if(controlb==HIGH)
{
countb++;
if(countb==20)
{
b=1;
countb=0;
}
}
if(controlc==HIGH)
{
countc++;
if(countc==30)
{
c=1;
countc=0;
}
}
}
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L11
99.
100.
101.
102.
103.
104.
105.
106.
107.
108.
109.
110.
111.
112.
113.
114.
115.
116.
117.
118.
119.
120.
121.
122.
123.
124.
125.
126.
127.
128.
129.
130.
131.
132.
133.
134.
135.
136.
137.
138.
139.
140.
141.
142.
143.
144.
145.
146.
147.
148.
void loop()
{
apill();
pejalan();
if(a==1)//setelah 5 detik melakukan :
{
digitalWrite(bz, LOW);
digitalWrite(PG,LOW);
digitalWrite(PR,HIGH);
digitalWrite(LR, LOW);
digitalWrite(LY,LOW);
digitalWrite(LG,HIGH);
Data = 'M';
controlb=LOW;
controlc=LOW;
kirim_kom();
a=0;
}
if(b==1) //setelah 20 detik melakukan :
{
digitalWrite(PR,LOW);
digitalWrite(LG,LOW);
digitalWrite(PG,HIGH);
digitalWrite(bz, HIGH);
digitalWrite(LR,HIGH);
digitalWrite(LY,LOW);
Data = 'H';
controlc=HIGH;
kirim_kom();
b=0;
}
if(c==1)//setelah 30 detik melakukan :
{
digitalWrite(bz, LOW);
digitalWrite(PG,LOW);
digitalWrite(PR,HIGH);
digitalWrite(LR, LOW);
digitalWrite(LY,HIGH);
Data ='K';
controla=HIGH;
kirim_kom();
c=0;
}
}
void rutin()
{
controlb=HIGH;
}
void pejalan()
{
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L12
149.
150.
151.
152.
153.
154.
155.
156.
157.
158.
159.
160.
161.
162.
163.
164.
165.
166.
167.
168.
169.
170.
171.
172.
173.
174.
175.
176.
177.
178.
179.
180.
181.
182.
183.
184.
185.
186.
187.
188.
189.
190.
191.
192.
193.
194.
195.
196.
197.
198.
int s;
for(s = 0; s<14; s++)
{
digitalWrite(latchPin, LOW);
shiftOut(PJL, clockPin, MSBFIRST, lampu[s]);
digitalWrite(latchPin, HIGH);
}
}
void apill() {
for(t = 0; t<14; t++)
{
digitalWrite(latchPin, LOW);
shiftOut(DS, clockPin, MSBFIRST, lampu[t]);
digitalWrite(latchPin, HIGH);
}
}
//komunikasi
void cekkom()
{
delay(500);
SPI.setBitOrder(MSBFIRST);
SPI.setDataMode(SPI_MODE0);
SPI.setClockDivider(SPI_CLOCK_DIV8);
SPI.begin();
pinMode(RFIRQ,INPUT);
digitalWrite(RFIRQ, HIGH);
pinMode(RFSS,OUTPUT);
digitalWrite(RFSS, HIGH);
Serial.begin(9600);
}
unsigned int RFtransfer(unsigned int data)
{
unsigned char nH, nL;
unsigned int n;
digitalWrite(RFSS,LOW);
delay(1);
nH=SPI.transfer(data/256);
nL=SPI.transfer(data%256);
delay(1);
digitalWrite(RFSS,HIGH);
n = (nH*256) + nL;
return n;
}
void RFTXinit(void)
{
RFtransfer(0x0000);
RFtransfer(0x80D8);
RFtransfer(0x8208);
RFtransfer(0xA640);
RFtransfer(0xC657);
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L13
199.
200.
201.
202.
203.
204.
205.
206.
207.
208.
209.
210.
211.
212.
213.
214.
215.
216.
217.
218.
219.
220.
221.
222.
223.
224.
225.
226.
227.
228.
229.
230.
231.
232.
233.
234.
235.
236.
237.
238.
239.
240.
241.
242.
243.
244.
245.
246.
247.
248.
RFtransfer(0x94A0);
RFtransfer(0xC2AC);
RFtransfer(0xCA80);
RFtransfer(0xCA83);
RFtransfer(0xC49B);
RFtransfer(0x9850);
RFtransfer(0xE000);
RFtransfer(0xC80E);
RFtransfer(0xC000);
}
void RFRXinit(void)
{
RFtransfer(0x0000);
RFtransfer(0x80D8);
RFtransfer(0x82D8);
RFtransfer(0xA640);
RFtransfer(0xC657);
RFtransfer(0x94A0);
RFtransfer(0xC2AC);
RFtransfer(0xCA80);
RFtransfer(0xCA83);
RFtransfer(0xC49B);
RFtransfer(0x9850);
RFtransfer(0xE000);
RFtransfer(0xC800);
RFtransfer(0xC000);
}
void RF12Open(void)
{
RFtransfer(0xB8AA);
RFtransfer(0xB8AA);
RFtransfer(0xB8AA);
RFtransfer(0x8238);
while(digitalRead(RFIRQ));
RFtransfer(0xB82D);
RFtransfer(0xB8D4);
}
void RF12SendByte(unsigned char data)
{
while(digitalRead(RFIRQ));
RFtransfer(0xB800+data);
}
void RF12Close(void)
{
RFtransfer(0xB8AA);
RFtransfer(0x82D8);
}
unsigned char RF12ReadByte(void)
{
unsigned char n;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L14
249.
digitalWrite(RFSS,LOW);
250.
delay(1);
251.
SPI.transfer(0xB0);
252.
n=SPI.transfer(0);
253.
delay(1);
254.
digitalWrite(RFSS,HIGH);
255.
return n;
256. }
257. void kirim_kom() {
258.
//inisialisasi data yang dikirim
259.
buff[0] = '&';
260.
buff[1] = Data; // data enable lampu mana yg nyala
261.
buff[2] = '#';
262.
buff[3] = '\0';
263. //ulang komunikasi, pengiriman menuju slave
264.
char x;
265.
for(i=0; i<3; i++)
266.
{
267.
RFTXinit();
268.
x = buff[i];
269.
RF12Open();
270.
RF12SendByte(x);
271.
RF12Close();
272.
RFtransfer(0x8008);
273.
}
274.
//controld==HIGH;
275.
Serial.println(buff);
276. }
277. //untuk terima data yg dikirim dari slave
278. void terima_kom(){
279.
String paket;
280.
char x;
281.
RFRXinit();
282.
while(paket[2] != '#'){ //tambahahin perintah clear string stlh cek terus data yg
diterima
283.
//paket.remove(3);
284.
if(digitalRead(RFIRQ)==LOW)
285. {
286.
x=RF12ReadByte();
287.
RFtransfer(0xCA80);
288.
RFtransfer(0xCA83);
289.
paket = paket + x;
290.
}
291. }
292.
Serial.print(paket);
293.
//pengolahan data yang diterima dari slave
294.
if(paket[1]=='Y'){
295.
controlb= HIGH;
296.
}
297. }