Pengoptimuman Ruang Terbuka Hijau Dan Ruang
advertisement

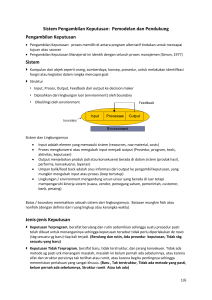
2 Menurut Undang-Undang Nomor 26 Tahun 2007 tentang Penataan Ruang, luas ideal ruang terbuka hijau (RTH) kawasan perkotaan minimal sebesar 30% dari luas kawasan perkotaan. Luas tersebut mencakup RTH publik dan RTH privat. Penyediaan RTH menjadi tanggung jawab pemerintah kabupaten/pemerintah kota yang dilakukan secara bertahap sesuai dengan kemampuan masing-masing daerah, sedangkan ruang RTH privat menjadi tanggung jawab pihak/lembaga swasta, perseorangan dan masyarakat yang dikendalikan melalui izin pemanfaatan ruang oleh pemerintah kabupaten/pemerintah kota kecuali provinsi DKI Jakarta oleh pemerintah provinsi. Definisi 3 (Lahan) Lahan merupakan lingkungan fisik yang terdiri atas iklim, relief, tanah, air, dan vegetasi serta benda yang ada diatasnya sepanjang ada pengaruhnya terhadap potensi penggunaan lahan. (Arsyad 2010) Definisi 4 (Penggunaan Lahan) Penggunaan lahan adalah setiap bentuk intervensi (campur tangan) manusia terhadap lahan dalam rangka memenuhi kebutuhan hidupnya baik materiil maupun spiritual. Penggunaan lahan dapat dikelompokkan ke dalam dua golongan besar, yaitu penggunaan lahan pertanian dan penggunaan lahan nonpertanian. (Arsyad 2010) Definisi 5 (Alih Fungsi Lahan) Alih fungsi lahan pertanian ke nonpertanian adalah bagian dari proses transformasi struktur ekonomi kawasan perkotaan, yang ditandai dengan berkembangnya sektor sekunder dan tersier yang menggeser peran sektor pertanian terhadap pertumbuhan ekonomi kawasan. (Nugroho & Dahuri 2004) Alih fungsi lahan lebih besar terjadi pada lahan pertanian dibandingkan pada tanah kering. Hal ini dipengaruhi oleh tiga faktor, yaitu: pertama, pembangunan kegiatan nonpertanian seperti kompleks perumahan, pertokoan, perkantoran, dan kawasan industri lebih mudah dilakukan pada tanah pertanian yang lebih datar dibandingkan dengan tanah kering; kedua, akibat pembangunan masa lalu yang terfokus pada upaya peningkatan produk pertanian maka infrastruktur ekonomi lebih tersedia di daerah pertanian daripada daerah tanah kering; ketiga, daerah pertanian secara umum lebih mendekati daerah konsumen atau daerah perkotaan yang relatif padat penduduk dibandingkan daerah tanah kering yang sebagian besar terdapat di wilayah perbukitan dan pegunungan. (Irawan 2005 dalam Akbar 2008) Definisi 6 (Pergiliran Tanaman) Pergiliran tanaman adalah sistem penanaman berbagai tanaman secara bergilir dalam urutan waktu tertentu pada suatu bidang tanah. (Arsyad 2010) Pergiliran merupakan suatu cara yang penting dalam konservasi tanah. Pergiliran dapat berupa padi – palawija, padi – tanaman penutup tanah/pupuk hijau, atau palawija – tanaman penutup tanah/pupuk hijau. Pada tanah berlereng, pergiliran yang efektif untuk pencegahan erosi adalah menurut pola tanaman bahan makanan – tanaman penutup tanah. Selain berfungsi sebagai pencegah erosi, pergiliran tanaman memberikan keuntungan-keuntungan antara lain seperti: 1) pemberantasan hama dan penyakit; menekan populasi hama dan penyakit karena memutus siklus hidup hama dan penyakit atau mengurangi sumber makanan dan tempat hidup hama penyakit, 2) pemberantasan gulma; penanaman satu jenis tanaman tertentu terus-menerus akan meningkatkan pertumbuhan jenis gulma tertentu, 3) mempertahankan dan memperbaiki sifat-sifat fisik dan kesuburan tanah; jika sisa atau potongan tanaman pergiliran dijadikan mulsa atau dibenamkan dalam tanah akan mempertinggi kemampuan tanah dalam menahan dan menyerap air, mempertinggi stabilitas agregat dan kapasitas infiltrasi tanah; jika tanaman tersebut adalah leguminosae akan menambah kandungan nitrogen tanah; dan 4) memelihara keseimbangan unsur hara karena absorpsi unsur dari kedalaman dan preferensi yang berlainan. Suatu sistem pergiliran tanaman yang tersusun baik, selain dari mempertahankan kesuburan tanah dan menghindari kerusakan tanah, akan mempertinggi produksi per satuan luas, per musim dan per tahun. (Arsyad 2010) 2.2 Pemrograman Linear Pemrograman linear adalah kegiatan merencanakan untuk mendapatkan hasil yang optimum. Model pemrograman linear meliputi 3 pengoptimuman suatu fungsi linear terhadap kendala linear. (Nash & Sofer 1996) Pemrograman linear memenuhi ketentuanketentuan sebagai berikut: a. tujuan masalah tersebut adalah memaksimumkan atau meminimumkan suatu fungsi linear dari sejumlah variabel keputusan. Fungsi yang akan dimaksimumkan atau diminimumkan ini disebut fungsi tujuan, b. nilai variabel-variabel keputusan harus memenuhi suatu himpunan kendala. Setiap kendala harus berupa persamaan linear atau pertaksamaan linear, c. ada pembatasan tanda untuk setiap variabel dalam masalah ini. Untuk sembarang variabel , pembatasan tanda menentukan harus taknegatif ( ≥ 0) atau tidak dibatasi tanda (unrestricted in sign). (Winston 2004) 2.3 Goal Programming Metode goal programming ditemukan oleh A. Charnes dan W.M. Cooper pada tahun 1955 dan mulai dipopulerkan pada tahun 1961. Model ini merupakan pengembangan dari model pemrograman linear yang mampu menyelesaikan kasus-kasus pemrograman linear yang memiliki lebih dari satu sasaran/tujuan yang hendak dicapai. Pada dasarnya model pada goal programming sama dengan model pada pemrograman linear, perbedaannya hanya terletak pada kehadiran sepasang variabel deviasi yang akan muncul di fungsi tujuan dan di fungsi-fungsi kendala model goal programming. Sepasang variabel deviasi ini adalah variabel dan yang taknegatif. Variabel berfungsi menampung deviasi yang berada di bawah sasaran yang dikehendaki, sedangkan variabel berfungsi menampung deviasi yang berada di atas sasaran yang dikehendaki. Ada tiga kemungkinan yang akan terjadi dalam penyelesaian dengan metode ini, yaitu: 1. Sasaran tercapai terjadi bila = = 0, 2. Sasaran tidak tercapai terjadi bila ≥ 0 dan = 0, 3. Sasaran terlampaui terjadi bila = 0 dan ≥ 0. (Siswanto 2007) Ilustrasi bentuk model goal programming dapat dilihat pada Contoh 1. Contoh 1 Misalkan diberikan model pemrograman linear: max = + terhadap kendala 7 + 3 ≥ 40 10 + 5 ≥ 60 5 + 4 ≤ 35 100 + 60 ≤ 600 , ≥ 0. (1) Dengan mengasumsikan bahwa ada tiga tujuan yang akan dicapai, yaitu pada kendala pertama, kedua, dan ketiga, maka dengan menambahkan variabel deviasi, model pemrograman linear dapat diubah menjadi model goal programming sebagai berikut: min = + + terhadap kendala 7 + 3 + − = 40 10 + 5 + − = 60 5 +4 + − = 35 100 + 60 ≤ 600 , , , ≥ 0, = 1,2,3. (2) Dalam formulasi (2), yang diminimumkan adalah + + karena yang hendak diminimumkan adalah deviasi yang berada di bawah sasaran yang dikehendaki. Dengan menggunakan software LINGO 11.0 diperoleh nilai fungsi tujuan dari (2) sebesar 5 dengan solusi optimal = 5, = 1.67, = 0, = 0, = 1.67, = 0, = 3.33, = 0 (lihat Lampiran 1). Solusi ini berarti bahwa tujuan pertama berhasil dicapai sedangkan tujuan kedua dan ketiga gagal dicapai. Bila setiap tujuan yang hendak dicapai memiliki prioritas yang berbeda untuk dicapai, setiap fungsi tujuan bisa diberi bobot. Ilustrasi bentuk model goal programming dengan bobot seperti berikut: min = 200 + 100 + 50 terhadap kendala 7 + 3 + − = 40 10 + 5 + − = 60 5 +4 + − = 35 100 + 60 ≤ 600 , , , ≥ 0, = 1,2,3. (3) Dengan menggunakan software LINGO 11.0 diperoleh nilai fungsi tujuan dari (3) sebesar 250 dengan solusi optimal 1 = 6, 2 = 0, − + − + − 1 = 0, 1 = 2, 2 = 0, 2 = 0, 3 = 5, + 3 = 0 (lihat Lampiran 1).