3.1. STARTING MOTOR SEBAGAI PENGGERAK MESIN
advertisement

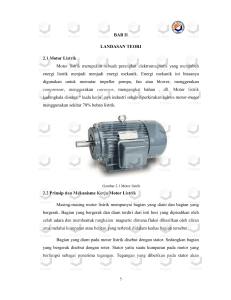
3.1. STARTING MOTOR SEBAGAI PENGGERAK MESIN-MESIN DI PG. REJO AGUNG BARU MADIUN Dalam proses produksi gula di PG Rejo Agung Baru Madiun di banyak menggunakan motor-motor induksi 3 fasa dengan berbagai jenis tegangan yang digunakan, mulai dari motor berukuran kecil sampai berukuran besar, maka dari itu setiap kali ingin mengoperasikan motor-motor tersebut kita harus menggunakan sistem kontrol agar lebih mudah dalam pengoperasian. Di PG REJO AGUNG BARU MADIUN menggunakan beberaka rangkaian kontrol starting motor seperti, DOL (Direct On Line), Star Delta, Autotranformator dan Soft Starter. 3.1.1. MOTOR INDUKSI Sebelum kita membahas tentang macam-macam starting sistem motor 3 fasa terlebih dahulu kita harus mengetahui tentang motor induksi.Motor induksi merupakan motor arus bolak-balik (ac) yang paling Iuas digunakan. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan anus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator. a.) Bentuk Fisik Motor Induksi b.) Bagian dalam Motor Gambar 3.11. Motor Induksi 3 fasa Belitan stator yang dihubungkan dengan satu sumber tegangan tiga fasa akanmenghasilkan medan magnet yang berputar dengan kecepatan sinkron (ns=120f/2p). Medan putar pada stator tersebut akan memotong konduktor-konduktor pada rotor, sehingga terinduksi arus, dan sesuai dengan hukum lentz, rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putar relatif antara stator dan rotor disebut slip. Bertambahnya beban akan memperbesar kopel motor, yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antara medan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah, putaran rotor cendrung menurun. Dikenai dua tipe motor induksi yaitu motor induksi dengan rotor belitan dan motor Induksi dengan rotor sangkar. Motor induksi adalah salah satu jenis dari motor-motor listrik yang bekerja berdasarkan induksi elektromagnet. Motor induksi memiliki sebuah sumber energi listrik yaitu di sisi stator, sedangkan sistem kelistrikan di sisi rotornya di induksikan melalui celah udara dari stator dengan media elektromagnet. Hal inilah yang menyebabkannya diberi nama motor induksi. Adapun penggunaan motor induksi di industri ini adalah sebagai penggerak, seperti untuk blower, kompresor, pompa, penggerak utama proses produksi atau mill, peralatan workshop seperti mesin-mesin bor, grinda, crane, dan sebagainya. Gambar 3.12. Rotor dan Stator 3.1.2. KONSTRUKSI MOTOR INDUKSI Motor induksi pada dasarnya mempunyai 3 bagian penting seperti yang diperlihatkan pada gambar 3.3 sebagai berikut. 1. Stator : Merupakan bagian yang diam dan mempunyai kumparan yang dapat menginduksikan medan elektromagnetik kepada kumparan rotornya. 2. Celah : Merupakan celah udara: Tempat berpindahnya energi dari startor ke rotor. 3. Rotor : Merupakan bagian yang bergerak akibat adanya induksi magnet dari kumparan stator yang diinduksikan kepada kumparan rotor. a) Stator dan rotor b) Rotor belitan sangkar Gambar 3.13. bentuk konstruksi dari motor induksi 3.1.3. JENIS-JENIS MOTOR LISTRIK Motor listrik terbagi dua yaitu : 1. Motor arus bolak balik (AC) Motor arus bolak balik (AC) terbagi menjadi : - Motor sinkron - Motor Induksi terbagi lagi menjadi : - Motor induksi 1 fasa - Motor induksi 3 fasa 2. Motor arus searah (DC) Motor arus searah (DC) terbagi menjadi : - Motor DC shunt - Motor DC seri - Motor DC Compound 3.1.4. MEDAN PUTAR Perputaran motor pada mesin arus bolak-balik ditimbulkan oleh adanya medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umurnnya tiga fasa.Hubungan dapat berupa bintang atau delta. Disini akan dijelaskan bagannana terjadinya medan putar itu. Perhatikan gambar 3.4 dibawah ini. Gambar 3.14. Medan Putar Misalnya kumparan a-a; b-b; c-c dihubungkan 3 fasa, dengan fasa rnasing-masing 120°(gambar 3.4a) dan dialiri arus sinusoid. Distribusi ia, ib, is sebagai fungsi waktu adalah seperti gambar 3.4b. pada keadaan tl, t2, t3, dan 14 fluks resultan yang ditimbulkan oleh kumparan tersebut masing-masing adalab seperti gambar 3.4 c, d, e, dan f. Pada t1 fluks resultannya mempunyai arah sama dengan arah fluks yang dihasilkan oleh kumparan a-a; sedangkan t2 fluks resultannya dihasilkan oleh kumparan b-b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang dihasilkan pada saat tl. Dari gambar 3.4 c, d, e, dan f tersebut terlihat bahwa fluks resultan ini akan berputar satu kali. Oleh karena itu, untuk mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron dapat diturunkan sebagai berikut Ns=120.f/p f = frekuensi p = jumlah kutub 3.1.5. PRINSIP KERJA MOTOR INDUKSI Prinsip kerja motor induksi adalah berdasarkan induksi elektromagnet, dimana tegangan sumber diberikan pada kumparan stator, sehingga inti besi di stator menjadi magnet, kemudian menginduksikan magnet tersebut ke rotor. Dengan demikian, di kumparan rotor akan terinduksi tegangan karena kumparan rotor merupakan loop tertutup, maka akan mengalir arus di kumparan rotor tersebut yang berinteraksi dengan medan magnet di stator, sehingga timbullah gaya putar pada rotor yang mendorong rotor untuk berputar dengan kecepatan sinkron dan akan mengikuti persamaan Dengan : N = Kecepatan putar dari medan putar stator dalam rpm F = Frekuensi arus dan tegangan stator P = Banyaknya kutub Garis-garis gaya fluks dari stator tersebut yang berputar akan memotong panghantarpanghantar rotor sehingga pada penghantar rotor tersebut timbul Gaya Gerak Listrik (GGL) atau tegangan induksi. Berhubung kumparan rotor merupakan rangkaian yang tertutup maka pada kumparan tersebut mengalir arus. Arus yang mengalir pada penghantar rotor yang berada dalam medan magnet berputar dari stator, maka pada penghantar rotor tersebut timbul gayagaya yang berpasangan dan berlawanan arah, gaya tersebut menimbulkan torsi yang cenderung memutar rotornya, rotor akan berputar dengan kecepatan (Nr) mengikuti putaran medan putar stator (Ns). 3.1.6. MEMILIH MOTOR LISTRIK Setiap motor listrik sebagai alat penggerak sudah mempunyai klasifikasi tertentu sesuai dengan maksud penggunaannya menurut kebutuhan yang diinginkan. Klasifikasi tiap motor listrik bisa dibaca pada papan nama (name plate) yang dipasang padanya sehingga untuk berbagai keperluan bisa dipilih motor yang sesuai. Di dalam pemakaian sederhana, klasifikasi motor hanya dikenal menurut : 1. Tenaga output motor (HP). 2. Sistem tegangan (searah, bolak-balik, ukurannya, fasenya). 3. Kecepatan motor (rendah, sedang, tinggi). Dalam pemakaian yang sederhana ini belum dicapai hal-hal lain yang sangat penting dalam memilih motor yang sesuai. Jadi dapat disimpulkan bahwa klasifikasi motor ini sangatlah luas mencakup dalam : 1. Hal-hal yang dibutuhkan oleh mesin-mesin yang digerakkan (driven machines) yang sesuai dengan tenaga dan torsi yang dibutuhkan 2. Karakteristik beban dan macam-macam kerja yang diperlukan 3. Konstruksi mesin-mesin yang digerakkan Hal-hal yang demikian akan memberikan pula macam-macam variasi bentuk dari motor termasuk alat-alat perlengkapannya (alat-alat pengusutan dan pengaturan). 3.1.7. MENINGKATKAN PERAWATAN Hampir semua inti motor dibuat dari baja silikon atau baja gulung dingin yang dihilangkan karbonnya, sifat sifat listriknya tidak berubah dengan usia. Walau begitu, perawatan yang buruk dapat memperburuk efisiensi motor karena umur motor dan operasi yang tidak handal. Sebagai contoh, pelumasan yang tidak benar dapat menyebabkan meningkatnya gesekan pada motor dan penggerak transmisi peralatan. Kehilangan resistansi pada motor, yang meningkat dengan kenaikan suhu. Kondisi ambien dapat juga memiliki pengaruh yang merusak pada kinerja motor. Sebagai contoh, suhu ekstrim, kadar debu yang tinggi, atmosfir yang korosif, dan kelembaban dapat merusak sifat-sifat bahan isolasi; tekanan mekanis karena siklus pembebanan dapat mengakibatkan kesalahan penggabungan. Perawatan yang tepat diperlukan untuk menjaga kinerja motor. Sebuah daftar periksa praktek perawatan yang baik akan meliputi sebagai berikut. 1. Pemeriksaan motor secara teratur untuk pemakaian bearings dan rumahnya (untuk mengurangi kehilangan karena gesekan) dan untuk kotoran/debu pada saluran ventilasi motor (untuk menjamin pendinginan motor) 2. Pemeriksaan kondisi beban untuk meyakinkan bahwa motor tidak kelebihan atau kekurangan beban. Perubahan pada beban motor dari pengujian terakhir mengindikasikan suatu perubahan pada beban yang digerakkan, penyebabnya yang harus diketahui. 3. Pemberian pelumas secara teratur. Pihak pembuat biasanya memberi rekomendasi untuk cara dan waktu pelumasan motor. Pelumasan yang tidak cukup dapat menimbulkan masalah, seperti yang telah diterangkan diatas. Pelumasan yang berlebihan dapat juga menimbulkan masalah, misalnya minyak atau gemuk yang berlebihan dari bearing motor dapat masuk ke motor dan menjenuhkan bahan isolasi motor, menyebabkan kegagalan dini atau mengakibatkan resiko kebakaran. 4. Pemeriksaan secara berkala untuk sambungan motor yang benar dan peralatan yang digerakkan. Sambungan yang tidak benar dapat mengakibatkan sumbu as dan bearings lebih cepat aus, mengakibatkan kerusakan terhadap motor dan peralatan yang digerakkan. 5. Dipastikan bahwa kawat pemasok dan ukuran kotak terminal dan pemasangannya benar. Sambungan sambungan pada motor dan starter harus diperiksa untuk meyakinkan kebersihan dan kekencangnya. 6. Penyediaan ventilasi yang cukup dan menjaga agar saluran pendingin motor bersih untuk membantu penghilangan panas untuk mengurangi kehilangan yang berlebihan. Umur isolasi pada motor akan lebih lama: untuk setiap kenaikan suhu operasi motor 100C diatas suhu puncak yang direkomendasikan, waktu pegulungan ulang akan lebih cepat, diperkirakan separuhnya. 3.1.8. STARTING SISTEM MENGOPERASIKAN MOTOR Masalah pada saat starting motor induksi yang umum menjadi perhatian adalah pada motor-motor induksi tiga fasa yang memiliki kapasitas yang besar. Selama periode waktu starting, motor pada sistem akan dianggap sebagai sebuah impedansi kecil yang terhubung dengan sebuah bus/jarigan. Motor akan mengambil arus yang besar dari sistem, sekitar enam kali arus ratingnya, dan bisa menyebabkan voltage drop pada sistem serta menyebabkan gangguan pada operasi beban yang lain. Hal ini dikarenakan pada motor, khususnya motor induksi, akan terjadi lonjakan arus pada saat starting. Lonjakan arus ini disebabkan oleh kondisi motor yang masih diam saat akan distart. Karena rotor belum bergerak, kecepatan relatif rotor terhadap medan magnet putar saat start akan maksimal sehingga tegangan yang diinduksikannya akan maksimal pula dan mengakibatkan nilai arus yang mengalir akan sangat besar. Hal lain yang menyebabkan lonjakan arus tersebut adalah adanya inrush current, yang disebabkan oleh sifat motor yang dianalogikan sebagai suatu induktor besar. Resistansi motor sangat kecil bila dibandingkan dengan induktansinya, sehingga saat starting, di mana induktansi motor masih bisa diabaikan, impedansinya hanya berasal dari resistansi yang bernilai kecil, dan menyebabkan arus yang mengalir akan sangat tinggi nilainya. Walaupun arus start yang besar tersebut hanya berlangsung dalam waktu yang cukup singkat, namun hal tersebut juga menyebabkan jatuh tegangan (voltage drop) sesaat yang disebut dengan voltage dip. Voltage Dip adalah penurunan tegangan antara (10 – 90) % dari tegangan nominal yang terjadi dalam waktu yang relatif singkat (0,5 cycle – beberapa detik). Efek yang merugikan akibat voltage dip ini meliputi : 1. Torsi yang bersifat transient yang dapat menyebabkan stress (tekanan) yang berlebih pada sistem mekanisnya. 2. Menghambat akselerasi (percepatan) putaran motor menuju kecepatan normal. 3. Kegagalan kerja dari peralatan – peralatan lainnya seperti relay, contactor dan menyebabkan flicker cahaya yang cukup mengganggu. Demi menjaga gar motor tetap beroperasi dan mencegah kegagalan kerja motor untuk mencapai kecepatan nominalnya, maka sebaiknya voltage dip tidak sampai di bawah 70% dari tegangan nominal. Ini dengan menganggap bahwa flicker cahaya bukanlah suatu hal yang mengganggu. Namun, jika faktor kualitas operasional dan pelayanan adalah hal yang utama, maka batasan voltage dip yang diizinkan adalah 10%.Untuk menanggualangi lonjakan arus ini, dapat digunakan beberapa cara starting motor induksi, antara lain: a. Direct On Line starter Direct On Line starter merupakan starting langsung. Penggunaan metoda ini sering dilakukan untuk motor-motor ac yang mempunyai kapasitas daya yang kecil. Pengertian penyambungan langsung disini, motor yang akan dijalankan langsung di switch on ke sumber tegangan jala-jala sesuai dengan besar tegangan nominal motor. Artinya tidak perlu mengatur atau menurunkan tegangan pada saat starting (lihat gambar). Gambar 3.15. Rangkaian DOL Starter Besar arus startnya dari 4 sampai 7 dari arus beban penuhnya (bila tidak diketahui biasanya dipakai 6x arus beban penuhnya). Starter ini terdiri dari Breaker sebagai proteksi hubung singkat, Magnetik Contactor, Over Currrent Relay dan komponen control seperti push button, MCB dan pilot lamp. Kontrol Start dan Stop dilakukan dengan push button yang mengontrol tegangan pada coil contactor. Sementara itu output OCR terangkai secara serrie sehingga jika OCR trip, maka output OCR akan melepas tegangan ke coil contaktor. Komponen penyusun starter ini harus mempunyai ampacity yang cukup besar. Perlu diperhitungkan juga arus saat start motor, demikian juga ukuran range overloadnya. b. Star Delta starter Starter ini mengurangi lonjakan arus dan torsi pada saat start. Tersusun atas 3 buah contaktor yaitu Main Contactor, Star Contactor dan Delta Contactor, Timer untuk pengalihan dari Star ke Delta serta sebuah overload relay. Pada saat start, starter terhubung secara Star. Gulungan stator hanya menerima tegangan sekitar 0,578 (seper akar tiga) dari tegangan line. Jadi arus dan torsi yang dihasilkan akan lebih kecil dari pada DOL Starter. Setelah mendekati speed normal starter akan berpindah menjadi terkoneksi secara Delta. Starter ini akan bekerja dengan baik jika saat start motor tidak terbebani dengan berat. Gambar 3.16. Star-Delta Starter Pada star delta starter, arus yang mengalir adalah dimana, IDOL= Arus start langsung c. Autotransformer starter Starting dengan cara ini adalah dengan menghubungkan motor pada tap tegangan sekunder autotransformer terendah. Setelah beberapa saat motor dipercepat tap autotransformer diputuskan dari rangkaian dan motor terhubung langsung pada tegangan penuh. a.gambar panel rangkaian starting auto transformator b.komponen fisik autotransformator Gambar 3.17. Rangkaian Autotransformer Starter Pada autotransformer starter, arus yang mengalir adalah dmana : Vm = Tegangan sekunder dari Auto-Transformer V1 = Tegangan supply IDOL = Arus start langsung d. Soft starter Soft starter dipergunakan untuk mengatur/ memperhalus start dari elektrik motor. Prisip kerjanya adalah dengan mengatur tegangan yang masuk ke motor. Pertama-tama motor hanya diberikan tegangan yang rendah sehingga arus dan torsipun juga rendah. Pada level ini motor hanya sekedar bergerak perlahan dan tidak menimbulkan kejutan. Selanjutnya tegangan akan dinaikan secara bertahap sampai ke nominal tegangannya dan motor akan berputar dengan dengan kondisi RPM yang nominal. Gambar 3.18. Diagram Soft Starter Komponen utama softstarter adalah thyristor dan rangkaian yang mengatur trigger thyristor. Seperti diketahui, output thyristor dapat di atur via pin gate nya. Rangkaian tersebut akan mengontrol level tegangan yang akan dikeluarkan oleh thyristor. Thyristor yang terpasang bisa pada 2 phase atau 3 phase. Gambar 3.19. Pengaturan tegangan tyristor Selain untuk starting motor, Softstarter juga dilengkapi fitur soft stop. Jadi saat stop, tegangan juga dikurangi secara perlahan atau tidak dilepaskan begitu saja seperti pada starter yang menggunakan contactor. Gambar 3.20. Rangkaian Softstarter e. Frequency drive (Starting Sistem dengan Inverter) Frequency Drive sering disebut juga dengan VSD (Variable Speed Drive), VFD (Variable frequency Drive) atau Inverter.VSD terdiri dari 2 bagian utama yaitu penyearah tegangan AC (50 atau 60 HZ) ke DC dan bagian kedua adalah membalikan dari DC ke tegangan AC dengan frequency yang diinginkan. VSD memanfaatkan sifat motor sesuai dengan rumus sbb: di mana : RPM = kecepatan merupakan putaran dalam motor f = frekuensi p = jumlah kutub motor Dengan demikian jika frekuensi motor ditingkatkan maka akan meningkatkan kecepatan motor, sebaliknya dengan memperkecil frekuensi akan memperlambat kecepatan motor. Pengendalian frekuensi motor menggunakan rangkaian inverter, seperti pada gambar: Gambar 3.21. Rangkaian kendali dan panel kontrol Inverter Prinsip kerja inverter yang sedehana adalah : Tegangan yang masuk dari jala jala 50 Hz dialirkan ke board Rectifier/ penyearah DC, dan ditampung ke bank kapasitor. Jadi dari AC di jadikan DC. Tegangan DC kemudian diumpankan ke board inverter untuk dijadikan AC kembali dengan frekuensi sesuai kebutuhan. Jadi dari DC ke AC yang komponen utamanya adalah Semiconduktor aktif seperti IGBT (Insulated Gate Bipolar Transistor). Dengan menggunakan frekuensi carrier (bisa sampai 20 kHz), tegangan DC dicacah dan dimodulasi sehingga keluar tegangan dan frekuensi yang diinginkan. Pengontrolan start, stop, jogging dll bisa dilakukan dengan dua cara yaitu via local dan remote. Local maksudnya adalah dengan menekan tombol pada keypad di inverternya. Sedangkan remote dengan menghubungkan terminal di board control dengan tombol external seperti push button atau switch. Masing masing option tersebut mempunyai kelemahan dan keunggulan sendiri sendiri. Frekuensi dikontrol dengan berbagai macam cara yaitu : melalui keypad (local), dengan external potensiometer, Input 0 ~ 10 VDC , 4 ~ 20 mA atau dengan preset memori. Semua itu bisa dilakukan dengan mengisi parameter program yang sesuai. Pada tabel berikut diberikan perbandingan performa dari aneka metode yang umum digunakan sebagai metode soft starting pada motor induksi, khususnya motor induksi tiga fasa. Tabel 3.2. Tabel start setiap rangkaian 3.1.9. PENGAMAN RANGKAIAN STARTING SISTEM Setiap rangkaian komponen dan alat-alat listrik yang akan digunakan untuk kebutuhan industri dan produksi harus diberi sistem proteksi untuk menghindari bergabai macam gangguan, misalnya hubung singkat, beban lebih, dan lain sebagainya, terutama untuk rangkaian starting sistem motor di PG Rejo Agung Baru Madiun, ada beberapa komponen yang umum digunakan sebagai pengaman motor, seperti EOCR,TOR, dan fuse a. Electronic Over Current Relay Electronic Over Current Relay adalah komponen elektrik yang berfungsi untuk membatasi arus yang mengalir pada motor. Terdapat beberapa istilah yang berhubungan dengan EOCR. - D-Time Pada setiap motor selalu ada lonjakan arus di awal penyalaannya (Starting Current). D-time digunakan untuk mengatur EOCR agar tidak trip saat motor baru dinyalakan. Setelah waktu yang diatur di D-time habis, maka EOCR akan menyensor arus normal motor. - O-Time O-Time digunakan untuk mengatur waktu trip saat terjadi arus lebih.Misalkan O- time diatur 1 detik dan arus pada EOCR diatur 1 Ampere. Saat terjadi kenaikan arus menjadi 1,5 A maka EOCR akan trip saat arus 1,5A tersebut telah melebihi 1 detik. Jika kenaikan tersebut hanya sesaat (kurang dari setting O-time) maka EOCR tidak akan trip. - Locked Rotor Locked Rotor dapat terjadi pada semua motor. Rotor yang seharusnya berputar dapat terkunci dengan berbagai sebab misalkan terjadi beban lebih yang membuat motor tersebut tidak kuat berputar. Dengan tidak berputarnya rotor maka arus yang mengalir ke motor akan semakin besar dan dapat menyebabkan gulungan motor terbakar. - Phase Loss Protector EOCR akan trip juga ketika terjadi hilang fasa. Di dalam EOCR terdapat 2 atau 3 transformer yang mendeteksi keberadaan masing-masing fasa. Jika ada salah satu fasa yang hilang maka EOCR akan trip. Gambar berikut menunjukkan bentuk dari EOCR Schneider Gambar 3.22. EOCR Schneider b. Thermal Overload Relay Thermal Overload Relay (TOR) adalah komponen yang fungsinya hampir sama dengan EOCR. TOR juga dipasang untuk melindungi motor dari beban lebih. Perbedaan TOR dengan EOCR adalah cara kerja TOR berdasarkan panas yang menggerakkan bimetal. Gambar Gambar 3.24. Thermal Overload Relay mengilustrasikan kerja dari TOR. Gambar 3.25. Ilustrasi Cara Kerja TOR Sumber: listrikpemakaian.wordpress.com Terdapat bagian yang akan putus jika suhu yang melewati TOR tersebut lebih dari nilai yang diset. c. Perbandingan TOR dengan EOCR Tabel dibawah ini menunjukkan perbandingan antara TOR dengan EOCR Tabel 3.3. perbandingan TOR dan EOCR Berdasarkan tabel diatas, pemilihan penggunaan TOR dan EOCR tergantung pada urgensi motor yang akan diamankan. Jika motor yang akan diproteksi adalah motor dengan beban kerja yang tinggi, misalkan motor pengangkut pasir yang ada kemungkinan terjadi locked rotor karena tidak kuat mengangkut pasir, lebih baik menggunakan EOCR. Jika motor yang akan diproteksi adalah motor dengan beban kerja ringan maka TOR adalah pilihan yang baik juga.