pemodelan statis dan dinamis pada motor starting untuk
advertisement

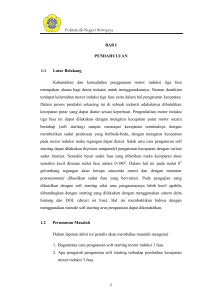
PEMODELAN STATIS DAN DINAMIS PADA MOTOR STARTING UNTUK ANALISIS STABILITAS TRANSIEN DENGAN MENGGUNAKAN SOFTWARE ETAP 7.0 (STUDI KASUS PT. SEMEN GRESIK TUBAN IV) Firlian Widyananda, Ontoseno Penangsang, Adi Soeprijanto Jurusan Teknik Elektro-FTI, ITS rotornya. Ketika kumparan stator dihubungkan ke sumber 3 fasa maka akan terbentuk medan putar dengan kecepatan Ns = (120.f)/P (2.1) Setelah itu medan putar akan memotong batang konduktor rotor sangkar atau memotong belitan rotor belit sehingga akan menimbulkan gaya gerak listrik (ggl) induksi. Dalam kondisi ini kumparan rotor merupakan rangkaian yang tertutup maka gaya gerak listrik (ggl) induksi akan menghasilkan arus I. Dengan adanya arus pada suatu medan magnet maka akan menimbulkan gaya F yang akan memutar rotor mengikuti arah medan putar stator. Abstrak - Proses motor starting dapat menyebabkan gangguan yang mengakibatkan sistem menjadi tidak stabil. Efek motor starting akan menyebabkan arus motor starting 5 hingga 10 kali arus nominal serta akan menyebabkan drop tegangan pada bus sistem. Penggunaan metode tahanan rotor ini dapat menurunkan arus starting dan memperbaiki drop tegangan. Metode tahanan rotor yang digunakan berupa tahanan liquid. Penggunaan starter berupa tahanan liquid ini akan merubah karakteristik torsi, arus, dan faktor daya. Perbedaan pemodelan statis dan dinamis adalah jika pada model statis, motor direpresentasikan sebagai impedansi rotor terkunci. Model dinamis digunakan untuk melihat lama waktu start motor serta menentukan tegangan kedip pada sistem akibat motor starting. Hasil simulasi dan analisis motor starting didapatkan perbedaan drop tegangan antara statis dan dinamis sebesar 17.3% untuk motor rooler mill, 16.5% untuk cement mill, dan 26.5% untuk rawmill fan. Kata Kunci: Metode Tahanan rotor, Pemodelan Statis, Pemodelan Dinamis, Tegangan kedip. 1. PENDAHULUAN P ada saat ini listrik merupakan energi yang sangat penting untuk kebutuhan hidup manusia. Oleh karena itu kualitas listrik yang baik haruslah terpenuhi. Dalam hal ini kualitas tenaga listrik meliputi aspek kontinuitas pelayanan daya dan kualitas bentuk gelombang tegangan serta frekuensi. Gangguan merupakan salah satu faktor penyebab ketidakstabilan pada sistem tenaga listrik. Gangguan pada sisi suplai dapat menyebabkan generator trip, dan hal ini akan mengakibatkan ketidakseimbangan antara jumlah suplai daya dengan daya beban. Selain itu efek motor starting akan mengakibatkan sistem tidak stabil. Proses motor starting akan menyebabkan arus motor starting 5 sampai 10 kali nilai arus nominalnya dan akan menyebabkan penurunan nilai tegangan pada bus-bus. Pada Pabrik Tuban IV terdapat beberapa motor yang memiliki kapasitas cukup besar. Apabila motor-motor dengan kapasitas yang cukup besar tersebut di-start maka dapat mengganggu kestabilan dari sistem kelistrikan di Pabrik Tuban IV. 2. TEORI PENUNJANG 2.1 Konstruksi dan Prinsip Kerja Motor Induksi Motor induksi memiliki dua bagian konstruksi yaitu stator dan rotor. Kumparan stator berfungsi untuk menghasilkan medan putar yang digunakan untuk perputaran motor [1]. Kumparan rotor merupakan bagian yang bergerak akibat adanya induksi magnet dari kumparan stator yang diinduksikan kepada kumparan rotor. Berdasarkan bentuk konstruksi rotor, maka motor induksi dapat dibedakan menjadi dua jenis yaitu : 1. Rotor tipe sangkar (squirrel cage) 2. Rotor tipe belit (wound rotor) Motor induksi bekerja berdasarkan induksi elektromagnetik dari kumparan stator ke kumparan 2.2 Metode Starting Motor Induksi Dalam melakukan starting motor induksi, terdapat beberapa metode yang digunakan untuk starting tersebut. Metode yang dapat digunakan untuk melakukan starting motor induksi besar yaitu direct on-line, autotransformer, soft starter, wye-delta, primary resistor winding, dan adjustable frequency drives [2]. Metode starting ini menggunakan prinsip mengendalikan tegangan dan arus input yang berfungsi untuk menurunkan torsi starting yang juga dapat mencegah kerusakan pada beban. Motor induksi tipe wound memiliki lilitan stator mirip dengan motor induksi sangkar bajing, tetapi lilitan rotor dihubungkan keluar dari motor dengan menggunakan slip ring dan sikat karbon. Tujuannya untuk menambahkan resistansi yang diseri dengan lilitan rotor selama proses starting. Setelah proses starting, resistansi tersebut di hubung singkat dengan menggunakan kontak. Keuntungan penambahan tahanan sekunder ini adalah mengurangi arus starting motor dan akan memperbaiki torsi saat proses starting. Terdapat dua jenis tahanan yang digunakan, yaitu tahanan metal dan liquid. Tahanan metal memiliki prinsip menggunakan kontak metal untuk mengatur nilai tahanan. Semakin jauh jarak kontak metal dari terminal input maka semakin besar nilai resistansinya. Kontak metal rawan meleleh akibat arus starting yang besar. Tahanan liquid memiliki prinsip cairan elektrolit yang merendam dua batang konduktor. Semakin tinggi cairan elektrolit maka semakin kecil nilai resistansinya. Tahanan liquid ini memiliki koefisien suhu terhadap nilai tahanan yang negatif sehingga semakin tinggi suhu maka nilai resistansinya akan mengecil hal inilah yang akan membatasi arus starting tahanan liquid [3]. Keuntungan tahanan liquid adalah pengaturan nilai resistansi tahanan liquid sangat halus karena tergantung pada tinggi rendaman cairan elektrolit dan tidak ada resiko kontak meleleh. 2.3 Standar Tegangan Kedip Kedip tegangan didefinisikan sebagai fenomena penurunan magnitude tegangan efektif terhadap harga nominalnya selama interval waktu (t). Biasanya disebabkan oleh sistem fault, energization beban besar ataupun starting 1 dari motor-motor besar. Standar tegangan kedip yang digunakan yaitu SEMI F47. z_th = ((j*xm) * (r1 + j*x1)) / (r1 + j*(x1 + xm)) (2.3) Tabel 2.1 Standar tegangan kedip menurut standar SEMI F47 VOLTAGE SAG DURATION Second (s) Cycles at Cycles at 50 60 Hz Hz < 0.05 s 0.05 to 0.2 s 0.2 to 0.5 s 0.5 to 1.0 s >1.0 s < 3 cycles 3 to 12 cycles 12 to 30 cycles 30 to 60 cycles > 60 cycles < 2.5 cycles 2.5 to 10 cycles 10 to 25 cycles 25 to50 cycles > 50 cycles dengan keterangan r1 dan x1 adalah resistansi dan reaktansi stator, xm adalah reaktansi magnetisasi sedangkan v_th dan z_th adalah tegangan dan impedansi thevenin. Setelah rangkaian pengganti didapatkan selanjutnya menghitung respon torsi-slip dengan menggunakan persamaan 2.4 [4] : VOLTAGE SAG Percent (%) of Equipment Nominal Voltage Not specified 50 % T 70 % 80 % r2 q1 V 2 th s 2 ωS 2 r X th X 2 R th 2 s 1 (2.4) Dengan keterangan q1 untuk jumlah phasa, ωs adalah kecepatan sinkron (rps), Rth dan Xth adalah resistansi dan reaktansi pengganti thevenin, r2 dan X2 adalah resistansi dan reaktansi rotor. Langkah selanjutnya adalah menentukan respon arus-slip dengan menggunakan persamaan 2.5 [5] : Not specified 2.4 Rangkaian Pengganti Motor Induksi Dalam melakukan starting dengan menggunakan tahanan rotor, maka diperlukan respon antara torsi-slip, arus-slip, dan pf-slip. Untuk mendapatkan respon tersebut dibutuhkan data motor yang meliputi : 1. resistansi dan reaktansi stator 2. resistansi dan reaktansi rotor 3. nilai resistansi eksternal 4. kecepatan sinkron motor 5. daya nominal, tegangan nominal, dan faktor daya nominal Langkah perhitungan dapat dilihat pada gambar 2.1 untuk mendapatkan respon torsi-slip, arus-slip, dan faktor daya-slip. Selain dengan menggunakan metode starter berupa liquid, pada tugas akhir ini akan dibahas juga mengenai perbedaan antara pemodelan statis dan dinamis. Pada gambar 2.2a dan 2.2b menunjukkan rangkaian pengganti thevenin untuk motor induksi. i A V rating dengan keterangan / 3 * Z in (2.5) r2 jx 2 jx m (2.6) s keterangan untuk i(A) adalah arus starting dengan satuan Ampere dan Zin adalah impedansi input dengan satuan Ohm (Ω). Langkah terakhir yaitu dengan menentukan respon pf-slip dengan menggunakan persamaan 2.7 [5] : (2.7) Pf Cos Penentuan respon torsi-slip, arus slip, dan pf-slip untuk starting motor dengan metode liquid dilakukan dengan mempertimbangkan bahwa pengaturan penurunan tahanan rotor dilakukan secara bertahap dengan 12 tingkat resistansi untuk studi kasus motor roolermill, cementmill, dan rawmill fan sehingga didapatkan 12 buah respon motor untuk setiap tingkat resistansi total rotor, penjumlahan dari resistansi lilitan rotor dengan resistansi eksternal, untuk kemudian digabungkan untuk setiap tingkatan kecepatan motor mulai dari keadaan start hingga kecepatan sinkron. Z in r1 jx1 Mulai Perhitungan rangkaian pengganti thevenin Perhitungan torsi-slip motor 2.5 Perbedaan Model Statis dan Dinamis Model statis yaitu suatu metode yang merepresentasikan motor sebagai impedansi rotor terkunci selama waktu starting yang akan menarik arus maksimum dari sistem. Setelah waktu akselerasi dari motor selesai, motor akan dirubah kedalam suatu beban kVA konstan. Untuk model dinamis yaitu suatu metode yang merepresentasikan motor sebagai model dinamis untuk melihat waktu starting dari sebuah motor hingga mencapai kecepatan nominalnya serta digunakan untuk mengetahui pengaruh tegangan kedip pada sistem. Gambar 2.3 dan 2.4 menunjukkan perbedaan model statis dan dinamis. Perhitungan arus-slip motor Perhitungan Pf-slip motor Selesai Gambar 2.1 Diagram alur penentuan karakteristik torsi, arus, dan Pf motor Gambar 2.2a Rangkaian motor Gambar 2.2b Rangkaian thevenin Hal pertama yang perlu dilakukan adalah mendapatkan rangkaian pengganti thevenin untuk menentukan parameter tersebut sehingga digunakan persamaan 2.2 dan 2.3 [4] : v_th = v_phase*(xm/√(r12+(x1+xm)2)) (2.2) Gambar 2.3 Model statis 2 Tabel 4.1 Data motor roolermill (344RM01) (lanjutan) Resistansi stator 0.580 Ω Reaktansi stator 0.61 Ω Resistansi rotor 0.0170 Ω Reaktansi rotor 0.61 Ω Reaktansi Magnetisasi 16.5 Lilitan stator/Lilitan rotor (pendekatan) 1 Tingkatan resistansi eksternal (terukur) No. Ω No. Ω No Ω No Ω 1 5.35 4 2.82 7 0.93 10 0.18 2 4.75 5 2.03 8 0.65 11 0.075 3 3.45 6 1.55 9 0.37 12 0 Gambar 2.4 Model dinamis 3. SISTEM KELISTRIKAN PT SEMEN GRESIK TUBAN IV Dengan menggunakan perangkat lunak MATLAB, maka akan didapatkan hasil respon torsi-slip, arus-slip, dan pf-slip yang telah dihitung berdasarkan persamaan 2.2 hingga 2.7 ditunjukkan pada tabel 4.2. 3.1 Sistem Kelistrikan PT. Semen Gresik Tuban IV Sistem kelistrikan pabrik Semen Tuban IV di suplai langsung dari sumber PLN sebesar 150 kV. Pada sistem kelistrikan ini tidak terdapat trafo step up untuk menaikkan tegangan output dari sumber. Tegangan output sumber langsung disalurkan ke masing-masing bus beban. Dari tiaptiap bus ini tegangan akan diturunkan. Tegangan output diturunkan menjadi 400 Volt maupun 700 Volt tergantung tegangan beban motor yang beroperasi. Tabel 4.2 Respon motor roolermill dengan liquid starter Slip Gambar 3.1 Single line diagram pabrik Tuban IV 3.2 Electrical Room Pabrik Tuban IV Sistem kelistrikan di Pabrik Tuban IV terbagi atas beban-beban yang dikelompokkan dalam 9 “Electrical Room” (ER) sesuai dengan proses produksi Pabrik Semen Tuban IV tersebut. Kesembilan ER beban tersebut disuplai oleh PLN 150 KV. Pembagian ER tersebut dapat ditunjukkan sebagai berikut : Electrical Room - 23A : Limestone Crusher Electrical Room - 23B : Clay & Silica Crusher & Storage Electrical Room - 23C : Limestone Storage Electrical Room - 24 : Raw Mill Electrical Room - 25 : Kiln, Pre-heater & Coal Mill Electrical Room - 26 : Cooler Electrical Room - 27 : Finish Mill Electrical Room - 28 : Packer Electrical Room - 29 : Utility 4. SIMULASI DAN ANALISIS 4.1 Pemodelan Motor Roolermill (344RM01) Motor roolermill merupakan motor yang memiliki kapasitas sebesar 5350 kW yang berada pada ER-24. Data motor dapat dilihat pada tabel 4.1. Tabel 4.1 Data motor roolermill (344RM01) Tegangan nominal 6300 V Daya nominal 5350 kW Kecepatan sinkron 600 rpm Pf nominal 0.8 3 % Torsi FL % I FL % PF 100 134.7 158.1 89.7 98.33 133.0 156.0 89.4 95 131.3 153.9 89.1 93.33 129.6 151.8 89.0 90 141.5 166.8 88.3 88.33 139.7 164.0 88.1 85 137.8 161.2 88.0 83.33 136.0 158.3 87.6 80 156.1 181.4 87.3 78.33 153.3 178.1 86.8 75 150.5 174.7 85.9 73.33 169.8 193.5 85.6 70 166.4 189.1 85.1 68.33 162.9 184.6 84.3 65 159.3 180.0 82.3 63.33 167.6 186.2 79.8 60 163.1 180.3 78.8 58.33 158.4 174.2 76.7 55 153.4 168.1 75.3 53.33 184.9 180.5 74.2 50 175.7 183.2 72.2 48.33 165.5 197.1 70.6 45 154.3 183.4 69.5 43.33 182.3 185.8 69.1 40 179.3 188.5 68.3 38.33 176.3 191.1 67.9 35 173.1 193.7 65.0 33.33 201.2 200.6 64.2 30 196.1 197.5 63.4 28.33 190.5 194.3 62.8 25 184.6 193.5 62.7 23.33 150.9 192.0 61.8 Tabel 4.2 Respon motor roolermill dengan liquid starter (lanjutan) Slip % Torsi FL % I FL Tabel 4.3 Tegangan bus motor berdasarkan model statis dan dinamis Kondisi starting BUS MOTOR Sebelum Selama Sesudah (%) (%) Drop (%) (%) Statis (DOL) 98.87 25.1421 73.7279 95.2177 Statis (Liquid 98.87 73.0142 25.8558 85.7955 Starter) Dinamis (Liquid 98.87 90.3171 8.5529 96.4975 Starter) % PF 20 152.6 191.1 62.2 15 154.4 187.9 61.1 10 156.3 188.5 68.3 5 148.3 186.6 79.2 3.33 143.0 152.9 87.9 1.67 165.3 145.4 91.3 0 10.0 53.6 70.6 Gambar 4.4 Tegangan bus motor roolermill berdasarkan model statis dan dinamis Gambar 4.1 Respon torsi motor rooler mill dengan liquid starter Gambar 4.2 Respon arus motor rooler mill dengan liquid starter Gambar 4.5 Arus starting motor roolermill berdasarkan model statis dan dinamis 4.2 Pemodelan Motor Cementmill (548RM01) Motor cementmill ini memiliki karakteristik yang sama dengan motor roolermill. Motor ini memiliki kapasitas sebesar 5500 kW yang berada pada electrical room 27. Data motor cementmill dapat dilihat pada tabel 4.4. Tabel 4.4 Data motor cementmill (548RM01) Tegangan nominal Daya nominal Kecepatan sinkron Pf nominal Resistansi stator Reaktansi stator Resistansi rotor Reaktansi rotor Reaktansi Magnetisasi Lilitan stator/Lilitan rotor (pendekatan) Tingkatan resistansi eksternal (terukur) No. Ω No. Ω No Ω 1 5.35 4 2.82 7 0.93 2 4.75 5 2.03 8 0.65 3 3.45 6 1.55 9 0.37 Gambar 4.3 Respon faktor daya motor rooler mill dengan liquid starter 4.1.1 Analisis Statis dan Dinamis Motor Roolermill (344RM01) Pada tugas akhir ini akan dilakukan perbandingan untuk motor yang diberi liquid starter dengan ketika motor tidak diberi starter (DOL). Selain model statis, juga akan dilakukan model dinamis. Model dinamis digunakan untuk melihat lama waktu start dari sebuah motor. Pada tabel 4.3 menunjukkan kondisi tegangan bus motor roolermill berdasarkan model statis dan dinamis. Dari tabel dapat terlihat perbedaan drop tegangan ketika motor di-start dengan statis secara direct online, statis ketika diberi liquid starter, dan dinamis. Pada model dinamis, lama waktu start dari motor roolermill ini adalah 5.04 detik. Gambar 4.4 dan 4.5 merupakan respon tegangan bus dan arus starting berdasarkan model statis dan dinamis. 6300 V 5500 kW 1200 rpm 0.8 0.780 Ω 0.610 Ω 0.01506 Ω 0.610 Ω 15 1 No 10 11 12 Ω 0.18 0.075 0 4.2.1 Analisis Statis dan Dinamis Motor Cementmill (548RM01) Analisis yang dilakukan sama seperti motor roolermill yaitu membandingkan antara model statis dan dinamis. Pada tabel 4.5 menunjukkan kondisi tegangan bus motor yaitu ER27-B834-MV272. 4 Tabel 4.6 Data motor rawmill fan (344FN03) (lanjutan) Lilitan stator/Lilitan rotor (pendekatan) Tingkatan resistansi eksternal (terukur) No. Ω No. Ω No Ω No 1 3.55 4 0.93 7 0.27 10 2 2.93 5 0.65 8 0.15 11 3 1.85 6 0.48 9 0.077 12 Tabel 4.5 Tegangan bus motor berdasarkan model statis dan dinamis Kondisi starting BUS MOTOR Sebelum Selama Sesudah (%) (%) Drop (%) (%) Statis (DOL) 101.185 32.7952 68.3898 99.7887 Statis (Liquid 101.185 76.4201 24.7649 99.7891 Starter) Dinamis (Liquid 101.185 93.6279 8.2221 99.7666 Starter) 1 Ω 0.043 0.023 0 Setelah data motor didapat, maka dilakukan plot respon karakteristik torsi-slip, arus-slip, dan pf-slip. Gambar 4.8 sampai 4.10 merupakan hasil plot respon. Pada saat motor di-start pada detik ke-1, waktu start yang dibutuhkan hingga motor mencapai keadaan steady state selama 6.1 detik. Kondisi tegangan bus motor akan ditunjukkan pada gambar 4.6. Gambar 4.8 Respon torsi motor rawmill fan dengan liquid starter Gambar 4.6 Tegangan bus motor cementmill berdasarkan model statis dan dinamis Arus starting dari sebuah motor juga cukup berbahaya terhadap sebuah sistem. Oleh sebab itu dilihat pula respon arusnya terhadap. Pada gambar 4.7 menunjukkan respon arus starting motor cementmill. Gambar 4.9 Respon arus motor rawmill fan dengan liquid starter Gambar 4.7 Arus starting motor cementmill berdasarkan model statis dan dinamis 4.3 Pemodelan Motor Rawmill Fan (344FN03) Motor rawmill fan ini merupakan jenis fan yang memiliki kapasitas paling besar di pabrik Tuban IV yaitu 8000 kW. Data motor ditunjukkan pada tabel 4.6. Tabel 4.6 Data motor rawmill fan (344FN03) Tegangan nominal Daya nominal Kecepatan sinkron Pf nominal Resistansi stator Reaktansi stator Resistansi rotor Reaktansi rotor Reaktansi Magnetisasi Gambar 4.10 Respon faktor daya motor rawmill fan dengan liquid starter 4.3.1 Analisis Statis dan Dinamis Motor Rawmill Fan (344FN03) Motor rawmill fan ini terletak di bus yang sama dengan motor roolermill yaitu bus ER24-C834-MV241. Dengan kapasitas yang cukup besar inilah yang akan menyebabkan sistem mengalami gangguan pada saat motor di-start. Pada saat motor rawmill fan ini starting, motor akan kembali steady state selama 20.92 detik. Kondisi tegangan bus saat motor rawmill fan start dapat ditunjukkan pada tabel 4.7. 6300 V 8000 kW 1800 rpm 0.8 0.2834 Ω 0.420 Ω 0.0270 Ω 0.420 Ω 15.5 5 Tabel 4.7 Tegangan bus motor berdasarkan model statis dan dinamis Kondisi starting BUS MOTOR Sebelum Selama Sesudah (%) (%) Drop (%) (%) Statis (DOL) 98.87 26.8971 71.9729 94.5728 Statis (Liquid 98.87 66.9763 31.8937 98.6271 Starter) Dinamis (Liquid 98.87 93.504 5.366 97.9029 Starter) sebesar 16.5428%, dan motor rawmill fan (344FN03) sebesar 26.5277%. 4. Arus starting statis pada rooler mill sebesar 140.728%, cementmill_tbl sebesar 148.008, dan rawmill fan sebesar 202.75%. Untuk arus starting dinamis rooler mill sebesar 141.122%, cementmill_tbl sebesar 148.404%, rawmill fan sebesar 77.0945%. 5. Pada bus ER24-C834-MV241 terdapat dua motor dengan kapasitas yang cukup besar yaitu 8000 kW dan 5350 kW. Oleh sebab itu motor dengan kapasitas 8000 kW harus di-start terlebih dahulu terhadap motor 5350 kW. Dari tabel 4.7 dapat dilihat efek yang diakibatkan motor starting ketika tanpa diberi starter yang akan menyebabkan drop tegangannya besar. Pada gambar 4.11 menunjukkan respon tegangan bus motor dan gambar 4.12 menunjukkan respon arus starting motor. 5.2 Saran Saran yang dapat diberikan untuk perbaikan dan pengembangan simulasi dan analisis pada tugas akhir ini adalah : 1. Pada tugas akhir ini, metode starting yang digunakan adalah liquid starter. Penggunakan metode starting lain juga akan memperbaiki drop tegangan dan arus starting yang tinggi. DAFTAR PUSTAKA [1] Zuhal, “Dasar Tenaga Listrik”. ITB Bandung, Bandung, 1991. [2] Abdullah Saeed Al-Amoudi, “Air conditioners Peformance Using Soft Starter”, King Fahd University of Petroleum & Minerals, 2003. [3] A. E. Fitzgerald dkk, “Electric Machinery Third Edition,” McGraw-Hill Book Company. 1971. [4] K A Walshe, “AC Motors Rev:A.” [5] John Larabee dkk, “Induction Motor Starting Methods and Issues”, Siemens Energy and Automation Inc., 2005. [6] Rotor Starters for Slipring Motors, Pape and Olbertz, 2008. [7] Resistance Motor Starter, ABB Australia Ply Limited, 2008. BIODATA PENULIS Gambar 4.11 Tegangan bus motor rawmill fan berdasarkan model statis dan dinamis Gambar 4.12 Arus starting motor rawmill fan berdasarkan model statis dan dinamis 5. PENUTUP Firlian Widyananda lahir di Surabaya pada tanggal 7 Maret 1989. Pendidikannya berawal dari TK Bina Bunga Bangsa Surabaya pada tahun 1992-1994, kemudian melanjutkan ke SD Tunas Jaka Sampurna Bekasi pada tahun 1995-2001, Setelah lulus ia melanjutkan pendidikannya ke SMPN 252 Jakarta Timur pada tahun 2001 2004, pendidikan SMA ditempuh pada tahun 2004-2007 di SMAN 12 Jakarta Timur pada tahun 2004-2007, setelah lulus melanjutkan pendidikannya di Institut Teknologi Sepuluh Nopember Surabaya Jurusan Teknik Elektro Bidang Studi Teknik Sistem Tenaga tahun 2007 - sekarang. Penulis pernah menjadi juara 2 dalam Energy Efficiency University Challenge Schneider Electric pada tahun 2010 dan saat ini menjadi asisten Laboratorium Simulasi Sistem Tenaga Listrik. Penulis dapat dihubungi di [email protected]. 5.1 Kesimpulan Dari hasil simulasi dan analisis, maka dalam tugas akhir ini dapat di tarik kesimpulan yang penting sebagai berikut: 1. Penggunaan metode starting berupa liquid starter akan memperhalus drop tegangan pada bus motor sehingga masih dalam batas aman. Selain hal tersebut, waktu starting yang dibutuhkan suatu motor juga tergolong cepat apabila menggunakan metode liquid starter. 2. Pemodelan dinamis akan memperbaiki drop tegangan di bus motor dibandingkan dengan menggunakan pemodelan statis. 3. Pemodelan dinamis dengan metode liquid starter akan memperbaiki drop tegangan pada bus motor. Perbedaan drop tegangan saat statis dan dinamis ketika motor rooler mill (344RM01) start sebesar 17.3029%, motor cementmill_tbl (548RM01) 6