BAB II LANDASAN TEORI 2.1 Motor Listrik Motor
advertisement

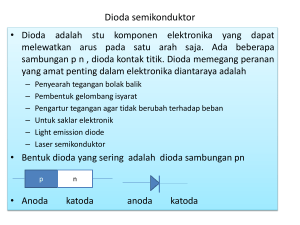
BAB II LANDASAN TEORI 2.1 Motor Listrik Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi menjadi energi mekanik. Energi mekanik ini biasanya digunakan untuk memutar impeller pompa, fan atau blower, menggerakan compressor, menggerakan conveyor, mengangkat bahan , dll. Motor listrik kadangkala disebut “ kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik. Gambar 2.1 Motor listrik 2.2 Prinsip dan Mekanisme Kerja Motor Listrik Masing-masing motor listrik mempunyai bagian yang diam dan bagian yang bergerak. Bagian yang bergerak dan diam terdiri dari inti besi yang dipisahkan oleh celah udara dan membentuk rangkaian magnetic dimana fluksi dihasilkan oleh aliran arus melalui kumparan atau belitan yang terletak didalam kedua bagian tersebut. Bagian yang diam pada motor listrik disebut dengan stator. Sedangkan bagian yang bergerak disebut dengan rotor. Stator yaitu suatu kumparan pada motor yang berfungsi sebagai penerima tegangan. Tegangan yang diberikan pada stator akan 5 6 menghasilkan arus. Arus yang dihasilkan akan menimbulkan medan magnet yang berputar. Medan magnet tersebut akan menginduksi pada rotor dan rotor berputar. Gambar 2.2 Komponen Stator Gambar 2.3 Rotor Sangkar Tupai dan Bagian-bagiannya Mekanisme kerja untuk seluruh jenis motor secara umum sama yaitu : a. Arus listrik dalam medan magnet akan memberikan gaya b. Jika kawat yang membawa arus dibengkokan menjadi sebuah lingkaran atau loop, kedua sisi loop pada sudut kanan medan magnet akan mendapatkan gaya pada arah yang berlawanan. c. Pasangan gaya menghasilkan tenaga putar atau torsi untuk memutar kumparan. 2.3 Motor Induksi Tiga Fasa Motor induksi adalah motor yang mempunyai slip antara medan putar dengan putaran rotornya. Di dalam motor induksi juga terdapat komponen utama yaitu rotor dan stator. Rotor pada motor induksi terbagi menjadi dua jenis rotor yaitu : 7 a. Rotor kandang tupai terdiri dari batang penghantar tebal yang dilekatkan dalam petak-petak slots parallel. Batang-batang tersebut diberi hubungan pendek pada kedua ujungnya dengan alat cincin hubungan pendek. b. Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi. Rotor tersebut dibuat melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian dalamnya dan ujung yang lainnya dihubungkan ke cicin kecil yang dipasang pada batang as dengan sikat yang menempel. Untuk stator yang ada di motor induksi ini dibuat dari sejumlah stampings dengan slots untuk membawa gulungan tiga fase. Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu. Gulungan diberi spasi geometri sebesar 120 derajat. Motor induksi diklasifikasikan menjadi dua kelompok utama yaitu motor induksi satu fasa dan motor induksi tiga fasa. Untuk motor induksi satu fasa penggunaan di industri sangatlah kurang dan kebanyakan di industri-industri besar itu menggunakan motor induksi tiga fasa. Motor induksi tiga fasa adalah motor listrik yang mempunyai kapasitaskapasitas daya yang besar. Dari alasan inilah banyak perusahaan atau industri-industri besar memilih motor induksi tiga fasa ini sebagai mesin-mesin yang membantu dalam proses produksi setiap harinya. Gambar 2.4 Motor induksi tiga fasa 8 Jenis-jenis motor induksi terbagi menjadi dua yaitu ada motor induksi tiga fasa rotor sangkar dan motor induksi tiga fasa rotor lilit. Di industri motor induksi tiga fasa yang sering kali di temui adalah motor induksi rotor sangkar. Motor induksi jenis rotor sangkar lebih banyak digunakan daripada jenis rotor lilit dikarenakan rotor sangkar mempunyai bentuk sederhana. Belitan rotor terdiri atas batang-batang penghantar yang ditempatkan di dalam alur rotor. Batang penghantar ini terbuat dari tembaga, alloy atau alumunium. Ujung-ujung batang penghantar dihubung singkat oleh cincin penghubung singkat, sehingga berbentuk sangkar burung. Karena batang penghantar rotor yang telah dihubung singkat, maka tidak dibutuhkan tahanan luar yang dihubungkan seri dengan rangkaian pada saat awal berputar. Alur-alur rotor biasanya tidak dihubungkan sejajar dengan sumbu (poros) tetapi sedikit miring. Gambar 2.5 Rotor sangkar 2.3.1 Torsi 1. Torsi Motor Torsi yang dihasilkan oleh sebuah motor pada saat mulai diasut disebut Torsi Asut, nilainya bisa lebih besar atau lebihkecil dari Torsi putar dalam keadaannormal. 9 2. Torsi saat Rotor(Motor) Berputar Pada saat motor berputar : dimana : E2r = Tegangan rotor / fasa saat berputar I2r = Arus rotor/fasa saat berputar 3. Torsi Maksimum saat Motor Berputar 10 Kondisi Torsi Maksimum pada saat motor berputar bisa diperoleh dengan mendeferen-tialkan persamaan Torsi terhadap Slip S. Berdasarkan hasil diferensial ini akan diperoleh ; 2.3.2 Tegangan Induksi pada rotor Saat rotor belum berputar maka Slip = 1, frekuensi dari ggl rotor nilainya sama dengan frekuensi yang di suplai ke bagian stator. Nilai tegangan induksi pada rotor saat diam adalah maksimum, sehingga motor ekuivalen dengan sebuah transformator tiga fasa yang di hubung singkat pada sisi sekundernya. Saat rotor mulai berputar, kecepatan relatif antara rotor dengan fluks medan putar stator akan menurun, sehingga tegangan induksi rotor berbanding langsung dengan kecepatan relatif, dengan demikian tegangan induksi di rotor akan mengalami penurunan. Jadi untuk Slip S, tegangan induksi rotor akan S kali tegangan induksi saat diam, oleh karena itu pada kondisi ber-putar : E2r = SE2 2.4 Metode-Metode Pengasutan Motor Induksi Tiga Fasa 2.4.1 Direct On Line (DOL) Direct On Line starter merupakan starting langsung. Penggunaan metoda ini sering dilakukan untuk motor-motor AC yang mempunyai kapasitas daya yang kecil. Pengertian penyambungan langsung disini, motor yang akan dijalankan langsung di 11 swich on ke sumber tegangan jala-jala sesuai dengan besar tegangan nominal motor. Artinya tidak perlu mengatur atau menurunkan tegangan pada saat starting. Gambar 2.6 Diagram Pengasutan DOL Besar arus startnya dapat mencapai 5 sampai dengan 7 dari arus beban penuhnya (bila tidak diketahui biasanya dipakai 6x arus beban penuhnya). Hal ini terjadi karena motor pada saat diam memiliki momen inersia (motor dalam keadaan diam), sehingga untuk mengalahkan momen inersia ini dibutuhkan arus yang besar. Starter ini terdiri dari breaker sebagai proteksi hubung singkat, kontaktor, over current relay dan komponen control seperti push button. Kontrol start dan stop dilakukan dengan push button yang mengontrol tegangan pada coil kontaktor. Sementara itu output OCR terangkai secara serrie sehingga jika OCR trip, maka output OCR akan melepas tegangan ke coil kontaktor. Komponen penyusun starter ini harus mempunyai ampacity yang cukup besar. Perlu diperhitungkan juga arus saat start motor, demikian juga ukuran range overloadnya. Keuntungan a. Sederhana : 12 b. Biaya rendah c. Torsi asut tinggi Kerugian : a. Arus asut sangat tinggi b. Sumber harus menahan arus puncak c. Urutan pengasutan kasar secara mekanik 2.4.2 Star Delta ( Y/D ) Starter ini mengurangi lonjakan arus dan torsi pada saat start. Tersusun atas 3 buah kontaktor yaitu main kontaktor, star kontaktor dan delta kontaktor, timer untuk pengalihan dari star ke delta serta sebuah overload relay. Pada saat start, starter terhubung secara star. Gulungan stator hanya menerima tegangan sekitar 0,578 (seper akar tiga) dari tegangan line. Jadi arus dan torsi yang dihasilkan akan lebih kecil dari pada DOL Starter. Setelah mendekati speed normal starter akan berpindah menjadi terkoneksi secara Delta. Starter ini akan bekerja dengan baik jika saat start motor tidak terbebani dengan berat. Gambar 2.7 Diagram Pengasutan Star Delta 13 Keuntungan : a. Sederhana b. Ekonomis starter c. Kinerja torsi atau arus asut baik Kerugian a. Torsi asut rendah, parameter pengasutan tidak dapat disesuaikan b. Tegangan sumber mengalami terputus pada proses pengasutan, sehingga dapat menimbulkan arus transien (peak) 2.4.3 Autotransformer Starting dengan cara ini adalah dengan menghubungkan motor pada tap tegangan sekunder autotransformer terendah. Setelah beberapa saat motor dipercepat tap autotransformer diputuskan dari rangkaian dan motor terhubung langsung pada tegangan penuh. Gambar 2.8 Diagram Pengasutan Autotransformer 14 Keuntungan : a. Kinerja torsi atau arus asut baik b. Memungkinkan parameter pengasutan dapat disesuaikan c. Motor tersuplai secara terus menerus selama pengasutan Kerugian : a. Dibutuhkan autotrafo (mahal) b. Tidak toleran pada transien saluran sumber 2.4.4 Soft Starter Starting dengan metode ini adalah metode yang berbeda dengan metode starting sebelumnya. Komponen yang digunakan adalah komponen-komponen elektronika daya yang terdiri dari rangkaian thyristor. Prinsif kerjanya yaitu dengan menaikan tegangan secara gradual, torsi akan naik dan motor mulai berakselerasi. Thyristor adalah komponen utama yang digunakan untuk mencacah gelombang tegangan pada sistem soft starter. Untuk mendapatkan besar tegangan yang diinginkan, dapat dilakukan dengan cara memberikan sudut penyulutan pada komponen tersebut sehingga gelombang tegangan yang melewati komponen ini akan tercacah sesuai dengan yang diinginkan. 15 Gambar 2.9 Proses pencacahan gelombang pada thyristor Selain dari penggunaan thyristor, pada pengasutan dengan metoda ini dibutuhkan suatu timer. Timer pada softstarter digunakan untuk proses penyulutan sudut alpha untuk mulai menghitung dan mengawali tegangan start hingga tegangan penuh dicapai. Proses pengaturan timer dapat dilihat pada gambar 2.10. 16 Gambar 2.10 Flow chart timer pada soft stater Waktu yang dibutuhkan untuk mengawali tegangan start sampai tegangan penuh pada proses soft statrting disebut dengan start ramp. Waktu ramp tidak boleh terlalu lama, karena akan mengakibatkan panas pada motor dan beresiko tripnya relay overload trip. Mengacu pada standar yang ada, biasanya waktu yang dibutuhkan untuk ramp tersebut dibutuhkan 5 sampai dengan 10 detik sesuai dengan beban yang digunakannya. 2.5 Komponen-Komponen Elektronika Daya 2.5.1 Dioda Dioda adalah suatu komponen elektronika yang biasanya digunakan untuk menyearhkan AC ke DC. Dioda dibentuk dari suatu sambungan bahan semikonduktor 17 tipe P dan N. sambungan P dan N ini dibentuk dengan cara pencampuran (alloying), difusi dan epitaksi. Dengan teknik pencampuran modern pada proses difusi dan epitaksi akan dapat menghasilkan karakteristik komponen yang dikehendaki. Gambar skema dari konstruksi dioda dapat dilihat pada gambar 2.11 Gambar 2.11 Konstruksi Dioda Pada sambungan, elektron-elektron bebas akan meninggalkan bahan tipe N dan berkombinasi dengan hole bebas dari bahan tipe P, sehingga pad bahan tipe N terdapat muatan positif sedangkan pada bahan tipe P terdapat muatan negatif. Dengan demikian pada sambungan terdapat daerah deplesi yang memiliki potensial barrier δv, yang besarnya tergantung dari jenis bahan semikonduktornya, untuk silicon sebesar 0,6-0,7 volt dan untuk germanium sebesar 0,3 volt. Apabila terminal anoda-katoda diberi tegangan negatif, daerah deplesi akan melebar sehingga diode mengalirkan arus yang sangat kecil. Arus ini disebut dengan arus bocor. Sedangkan apabila anoda diberi tegangan yang relatif lebih positif terhadap katoda, daerah deplesi akan menyempit dengan potensial barrier 0,6-0,7 volt untuk silicon dan 0,3 volt untuk germanium, sehingga diode dapat mengalirkan arus yang besar. Karakteristik dioda ditunjukan pada gambar 2.12 Gambar 2.12 Karakteristik diode 18 Gambar 2.13 Simbol dioda 2.5.2 Dioda Zener Dioda zener adalah salah satu jenis dioda yang memilki sisi exsklusif pada daerah breakdownnya, sehingga dapat dimanfaatkan sebagai stabilizer atau pembatas Struktur dioda zener hamper sama dengan diode pada umumnya, hanya tegangan. konsentrasi doping saja yang berbeda. Kurva karakteristik diode zener juga sama seperti diode pada umumnya, namun pada daerah breakdown dimana pada saat bias mundur mencapai tegangan breakdown maka arus diode naik dengan cepat seperti pada gambar karakteristik diode zener dibawah. Daerah breakdown inilah yang menjadi referensi untuk penerapan dari diode zener. Sedangkan pada diode biasa daerah breakdown merupakan daerah kritis yang harus dihindari dan tidak diperbolehkan pemberian tegangan mundur sampai pada daerah breakdown, karena bisa merusak diode biasa. Gambar 2.14 Kurva Karakteristik dan Simbol Dioda Zener Penerapan diode zener yang paling penting adalah sebagai regulator atau stabilizer tegangan. Gambar 2.15 Dioda Zener 19 2.5.3 Resistor Resistor disebut juga dengan tahanan atau hambatan, berfungsi untuk menghambat arus listrik yang melewatinya. Satuan harga resistor adalah Ohm. Resistor terbagi menjadi dua macam, yaitu resistor tetap da resistor variable. Resistor tetap yaitu resistor yang nilai hambatannya relative tetap, biasanya terbuat dari karbon, kawat atau paduan logam. Nilai hambatannya ditentukan oleh tebalnya dan panjangnya lintasan karbon. Panjang lintasan karbon tergantung dari kisarnya alur yang berbentuk spiral. Gambar 2.16 Simbol resistor tetap Kode warna pada resistor menyatakan harga resistansi dan toleransinya. Semakin kecil harga toleransi suatu resistor adalah semakin baik, karena harga sebenarnya adalah harga yang tertera kurang lebig harga toleransinya. Tabel 2.1 Kode Warna pada Resistor 4 Gelang 20 2.5.4 Kapasitor Kapasitor atau kondensator adalah suatu komponen listrik yang dapat menyimpan muatan listrik. Kapasitas kapasitor dalam satuan F (Farad). Kapasitor elektrolit mempunyai dua kutub yaitu kutub positif dan kutub negatif (bipolar), sedangkan kapasitor kering, misal kapasitor mika, kapasitor kertas tidak membedakan kutub positif dan kutub negative (non bipolar). Bentuk dan symbol kapasitor dapat dilihat pada gambar dibawah ini. Gambar 2.17 (a) Kapasitor ; (b) Simbol Kapasitor 2.5.5 Operational Amplifier Penguat operasi ( operating amplifier, dikenal sebagai op-amp) adalah suatu penguat gandengan langsung dengan bati (gain) tinggi dan dilengkapi dengan umpan balik unruk mengendalikan kinerjanya secara menyeluruh. Penguat operasi biasanya diperoleh delam rangkaian terintegrasi ( integrated circuit = IC ) analog. Penguat operasi telah memperoleh pengakuan secara luas sebagai suatu komponen elektronik yang serba guna, dapat dihandalkan dan ekonnomis. Suatu penguat operasi ideal mempunyai beberapa karakteristik (tanpa umpan balik) : a. Impedansi masukan Zi = tak hingga b. Impedansi keluaran Z0 =0 c. Penguat tegangan Av = - tak terhingga d. Lebar pita BW = tak terhingga e. Keseimbangan sempurna Vo = 0 bila V1 = V2 f. Karakteristik tak berubah karena suhu 21 Gambar 2.18 Penguat Operasi Dasar Suatu penguat operasi dapat digunakan untuk berbagai keperluan, misalnya penguat tak membalik (non inverting amplifier). Penguat operasi yang dipakai adalah tipe 741 yang telah banyak dikenal. Ic inimempunyai delapan kaki, dengan keterangan sebagai berikut : Gambar 2.19 Tata Letak Kaki IC 741 a. Kaki 1 dan 5 : offset null b. Kaki 2 : masukan membalik c. Kaki 3 : masukan tak membalik d. Kaki 4 : catu tegangan negatif e. Kaki 6 : keluaran f. Kaki 7 : catu tegangan positif g. Kaki 8 : tak digunakan Penguat tak membalik mempunyai ciri yaitu masukan yang dipakai adalah masukan tak membalik (non inverting input) dan keluarannya sefasa dengan masukannya. 22 Gambar 2.20 Penguat Tak Membalik (Non Inverting Amplifier) 2.5.6 Ic Regulator 1. Ic 7805 7805 adalah suatu IC yang berfungsi sebagai regulator tegangan. 7805 ini adalah bagian seri 78xx dari ICs regulator tegangan yang nilai tegangan keluaranya tetap. Tegangan sumber di rangkaian dapat mengalami fluktuasi dan tidak memberikan tegangan keluaran yang tetap. IC tegangan regulator meneruskan nilai tegangan keluaran yang konstan. Xx di 78xx mengindikasikan nilai tetap tegangan keluarannya. 7805 menyediakan +5V dari power suplay yang telah diatur. Beberapa kapasitor yang telah disesuaikan nilainya dapat dihubungkan dengan pin-pin input dan output yang bergantung pada masing-masing level tegangannya Gambar 2.21 Pin Diagram IC 7805 23 Tabel 2.2 Deskripsi Pin IC 7805 Pin No Function Name 1 Input voltage (5V-18V) Input 2 Ground (0V) Ground 3 Regulated output : 5V (4,8V-5,2V) Output 2. Ic 7905 7905 adalah suatu IC yang berfungsi sebagai regulator tegangan. 7905 ini adalah bagian seri 79xx dari ICs regulator tegangan yang nilai tegangan keluaranya tetap. Tegangan sumber di rangkaian dapat mengalami fluktuasi dan tidak memberikan tegangan keluaran yang tetap. IC tegangan regulator meneruskan nilai tegangan keluaran yang konstan. Xx di 79xx mengindikasikan nilai tetap tegangan keluarannya. 7905 menyediakan suatu pengatur yang memberikan tegangan -5V dan arus 1A. ini adalah beberapa fitur tambahan yang mencakup internal thermal overload protection, proteksi hubung singkat dan pengaman keluaran transistor yang bekerja di area kompensasi. Gambar 2.22 Pin Diagram IC 7905 Tabel 2.3 Deskripsi Pin IC 7905 Pin No Function Name 1 Ground (0V) Ground 2 Input voltage (5V-18V) Input 3 Regulated output : 5V (4,8V-5,2V) Output 24 2.5.7 TRIAC TRIAC atau Triode for Alternating Current (Trioda untuk arus bolak-balik) adalah sebuah komponen elektronik yang kira-kira ekivalen dengan dua SCR yang disambungkan antiparallel dan kaki gerbangnya disambungkan bersama. Gambar 2.23 TRIAC Equivalent Circuit Nama resmi untuk TRIAC adalah Bidirectional Triode Thyristor. Ini menunjukan sakelar dwiarah yang dapat mengalirkan arus listrik ke kedua arah ketika dipicu (dihidupkan). Ini dapat disulut baik dengan tegangan positive ataupun negative pada electrode gerbang. Sekali disulut, komponen ini akan terus menghantar hingga arus yang mengalir lebih rendah dari arus genggamnya, misal pada akhir paruh siklus dari arus bolak-balik. Hal tersebut membuat TRIAC sangat cocok untuk mengendalikan kalang AC, memungkinkan pengendalian arus yang sangat tinggi dengan arus kendali yang sangat rendah. Sebagai tambahan, memberikan pulsa sulut pada titik tertentu dalam siklus AC memungkinkan pengendalian persentase arus yang mengalir melalui TRIAC (pengendalian fase). Low-Current TRIAC dapat mengontak hingga kuat arus satu ampere dan mempunyai maksimal tegangan sampai beberapa volt. Medium-Current TRIACS dapat mengontak sampai kuat arus 40 ampere dan mempunyai maksimal tegangan hingga 1000 volt. 25 Gambar 2.24 Simbol Skematik TRIAC Gambar 2.25 Konstruksi Simbol TRIAC