metode baru dalam identifikasi parameter motor induksi
advertisement

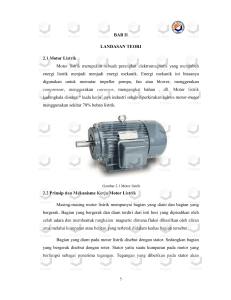
Epsilon : Journal of Electrical Engineering and Information Technology Vol. 1, No. 1, July 2003 METODE BARU DALAM IDENTIFIKASI PARAMETER MOTOR INDUKSI*) Soemarto Jurusan Pendidikan Teknik Elektro, Fakultas Pendidikan Teknologi dan Kejuruan, Universitas Pendidikan Indonesia Jl. Dr. Setiabudhi No. 207 Bandung, Indonesia e-mail : [email protected] Abstract The present paper describes a new parameter identification method for induction motor. This method requires only a start-up test during which speed as well as stator currents and voltages are measured. The procedure allows the computation of the parameters of the equivalent circuit of different types of induction motor. Keywords : induction motor, optimization, parameter identification. Abstrak Pengidentifikasian sebuah parameter baru pada motor induksi. Metode ini hanya menggambarkan selama start-up test selama kelajuan sebaik arus stator dan tegangan .yang diukur. Proses kuantitas pada prosedur pengidentifikasian ini dihasilkan dari perhitungan sebuah parameter pada rangkaian ekivalen untuk setiap tipe yang berbeda pada motor induksi. Kata kunci : identifikasi parameter, motor induksi, optimisasi. l. Pendahuluan Sebuah perkiraan yang lazim untuk perputaran motor pada kondisi steady-state atau transient dengan simulasi numerik yang terbaik adalah untuk mengontrol pergerakan variabel-kelajuan, memerlukan sebuah pengetahuan yang tepat untuk parameter rangkaian ekivalen pada motor induksi. Metode klasik yang normal menggunakan several-test yang digunakan untuk mendapatkan parameter pada rangkaian ekivalen untuk setiap tipe yang berbeda pada motor induksi dengan kerelatifan waktu investasi yang penting. Sebuah metode baru dijelaskan pada paper ini didasarkan pada single start-up test yang dapat digunakan untuk seluruh tipe pada motor induksi. Sebuah test-bench yang dihasilkan untuk mendapat start-up test dan pengukuran kuantitas yang berbeda yakni : tegangan dan arus stator, faktor kerja, kelajuan rotor dan torsi elektromagnetik. Prosedur pengidentifikasian dihasilkan dari perhitungan sebuah parameter pada rangkaian ekivalen sampai dengan 3 rangkaian rotor. Prosedur ini didasarkan pada metode pengoptimalisasian yang disebut "metode gradient". Definisi dari fungsi objektif, J yang diijinkan untuk mendapatkan lambang matematik. 2. Start-up Test Diagram rangkaian ekivalen pada motor induksi diperlihatkan pada gambar l. Jumlah yang diperhitungkan rangkaian rotor bergantung pada tipe dari motor induksi. Hal ini sama untuk memutar 1 type rotor dan 2 atau 3 untuk tipe squirrel-cage atau double-cage, dengan mengatur perhitungan skin effect. ______________________________________________________________________ 17 Gambar 1. Rangkaian ekivalen motor induksi dengan 3 rangkaian rotor Pada kondisi steady-state, Z = U.I Gambar 2. Test-bench (1) dengan Z menyatakan total impedansi. Untuk menentukan jumlah parameter bergantung pada jumlah rangkaian rotor. Selama start-up test kelajuan, tegangan stator, arus, torsi dan faktor kerja (power factor) akan disimpan. Pada hal lain untuk menjelaskan kondisi steady-state, pada saat starting pensuplaian ke stator akan ditingkatkan dengan dikuranginya tegangan, dan jika hal ini dianggap penting dapat dilakukan dengan peningkatan inersia pada rotor oleh flywheel. Dengan menulis persamaan l untuk kelajuan atau slip yang berbeda selama start-up test, akan diperoleh satu persamaan yang diijinkan pada diagram rangkaian ekivalen. Bagian terpenting pada test-bench adalah sistem data perolehan dan perhitungan. Pada bagian ini berisi tiga kartu perolehan untuk tegangan dan arus (2,3) bagian perhitungan yakni sebuah DSP dan sebuah kartu memori (gambar 3). Nilai yang dihitung sebanding dengan kelajuan yang disimpan dalam kartu memori. Sebuah peralatan algoritma DSP akan menjumlahkan nilai effektif pada bagian arus dan tegangan yang sebanding dengan power factor pada tiga phasa. 3. Deskripsi pada Test-Bench Bagian-bagian yang di gunakan pada aturan percobaan adalah (lihat gambar 2): Motor induksi Perlengkapan untuk data perolehan dan perhitungan transient untuk torsi celah udara Letak sensor Personal Computer (PC) Gambar 3. Perangkat Digital Signal Processing (DSP) Nilai sesaat akan mendapat reaksi dari arus phasa dan tegangan seperti dicontohkan pada sebuah frekuensi 100 KHz dan ditransfer ke DSP, yang mentransfer nilai phasa kebentuk nilai berhenti dan menjumlahkan torsi celah udara (4). Sebuah sensor menggunakan kode Gray yang ditentukan akan menghitung kelajuan. 4. Proses Perhitungan Tegangan yang tetap digunakan pada bagian terminal unit data perolehan 18 Metode Baru Dalam Identifikasi ParameterMotor Induksi (Soemarto) Epsilon : Journal of Electrical Engineering and Information Technology Vol. 1, No. 1, July 2003 adalah perhitungan awal bekerjanya motor induksi. Nilai efektif pada tegangan dan arus, faktor kerja dan torsi elektromagnetik akan dijumlahkan dan disimpan dalam papan memori. Ketika starting-up diakhiri, DSP mencatat data dari PC dan memeriksa prosedur awa1. Prosedur pengidentitikasian menyediakan perhitungan pada rangkaian ekivalen sampai dengan 3 rangkaian rotor. Prosedur ini didasarkan pada metode iterasi optimal yang disebut "metode gradient"(5). Definisi dari fungsi objek J yang diijinkan untuk mendapatkan lambang matematik yaitu jumlah karakteristik untuk parameter yang diidentifikasi. Prosedur pengidentifikasian dapat diperoleh dari MATLAB yang memiliki kemampuan terbaik diantara sistem lain (Windows, Mac. OS, UNIX). Seluruh perhitungan akan dibuat per unit (pu), dimana besarnya impedansi dalam per unit adalah : 1 z mod el .u (2) Torsi elektromangnetik, tem,model pada motor induksi akan sebanding dengan rugi-rugi i2r pada rotor dan besarnya torsi dalam perunit adalah : tem,model = Pcu,r s ( i J( ,s,u,imes,tem,mes)= s 5. Deskripsi pada prosedur pengidentifikasian i mod el dengan membedakan i dan tem . Fungsi objektif J bergantung pada penentuan parameter , slip s, tegangan yang digunakan, arus yang diukur imes dan torsi yang diukur tem,mes, yakni : (3) t em ) (4) s Prosedur pengidentifikasian yang dijelaskan di atas mengawali diagram rangkaian ekivalen yang diambil dari perhitungan skin effect yang sebanding dengan rugi-rugi akibat efek kejenuhan dan kebocoran reaktansi magnetik selama start-up test. Akibat dari efek kejenuhan pada reaktansi magnetik yang diperoleh dari tes beban nol secara otomatis setelah start-up test. Parameter dari rangkaian ekivalen diperoleh dari constraints. Untuk itu hal ini mungkin terjadi pada pengaturan batas bawah dan batas atas untuk daerah yang bervariasi. Untuk setiap tipe motor induksi yang lain dapat ditetapkan secara bebas, tetapi penggunaan dapat dimodifikasi harga mulanya. Sebagai contoh untuk tahanan pada stator yang dapat diukur secara manual, akan dapat diperkenalkan. Harga mula dalam prosedur pengidentifikasian akan terkumpul dengan cepat pada solusi yang dapat diterima. Hal itu dapat memungkinkan untuk menentukan constraints, seperti akibat kebocoran induktansi dalam rangkaian rotor pertama yang mempunyai nilai tertinggi terhadap rangkaian rotor yang kedua. Grafik pada interface memperkenalkan pada pengguna tentang seluruh parameter yang dibutuhkan untuk pengidentifikasian perameter-parameter: nomor rangkaian rotor, pembatas, initial values pada parameter dan tampilan grafik. Gambar 4. Skema dari algoritma optimasi Permasalahan parameter pada rangkaian ekivalen (menempatkan secara bersamaan dalam vector ) akan dapat diperkecil, untuk seluruh susunan pada kelajuan 6. Contoh Penggunaan Pada tabel 1 dibawah ini akan diperlihatkan beberapa karakter motor yang diuji: ______________________________________________________________________ 19 Tabel 1. Karakteristik dari motor yang diuji Type Connection Rated voltage Un (V) Rated current In(V) Rated active power Pn (V) Rated speed nn (rpm) Rated frequency (Hz) Power factor cos n (I) Wound Rotor Motor 1 Double Cage Motor 2 Deep Bars Motor 3 Y Y Y 230 / 380 220 / 380 220 / 380 8,7 / 5 11,9 / 6,9 63 / 36,5 2200 2200 18500 1405 1435 1460 50 50 50 0,8 0,79 0,85 6.2 Motor induksi double cage Untuk contoh ke dua digunakan motor induksi double cage (lihat tabel 1motor 2). Diagram rangkaian ekivalen dihubungkan dengn rangkaian rotor 2. Skin effect yang penting untuk tipe motor ini memiliki nilai slip 1. Akibatnya, locus geometri arus tidak digambarkan secara semicircle, tetapi dengan bagian circle untuk nilai yang tertinggi dari slip (lebih dari 0,4). 6.1 Wound rotor type pada motor induksi Sebuah motor induksi tipe wound rotor digunakan untuk contoh (lihat tabel 1 motor 1), pada kasus ini tempat geometri pada perhitungan arus untuk rangkaian ekivalen akan diperlihatkan dengan setengah putaran (semicircle). Gambar 5 memperlihatkan hasil pengukuran dan perhitungan. Gambar 7. Locus arus untuk motor 2 Gambar 7 memperlihatkan arus yang telah dihitung dan diukur. Perbandingan torsi relatif maksimum antara yang diukur dengan yang dihitung adalah = 8% (lihat gambar 8). Gambar 5. Locus arus untuk motor 1 Gambar 6 memperlihatkan torsi yang dihitung agak lebih tinggi dibanding torsi yang diukur. Besar torsi maksimum adalah 8% dan terendah 4% untuk setiap nilai. Gambar 8. Pengukuran dan perhitungan torsi untuk motor 2 6.3 Deep bar motor induksi metode yang tepat Gambar 6. Pengukuran dan perhitungan torsi untuk motor 1 20 Metode yang tepat untuk motor yang paling besar, yakni motor ke tiga pada tabel 1 yang digunakan sebagai contoh. Skin effect sangat penting pada kasus ini. Sebuah contoh pada rotor dengan 2 rangkaian. Gambar 9 dan 10 memperlihatkan arus dan torsi yang telah dihitung dan diukur untuk rotor dengan 3 rangkaian rotor. Metode Baru Dalam Identifikasi ParameterMotor Induksi (Soemarto) Epsilon : Journal of Electrical Engineering and Information Technology Vol. 1, No. 1, July 2003 Perbandingan relatif antara nilai maksimum dari torsi adalah = 9 %. Gambar 13. Simulasi torsi Gambar 9. Locus arus untuk motor 3 Gambar 14. Tegangan fasa yang diukur Gambar 10. Pengukuran dan perhitungan torsi untuk motor 3 6.4 Motor Induksi yang diberi sebuah konverter frekuensi Bagian pada rangkaian ekivalen dapat digunakan sebagai simulasi motor yang berbeda dalam kondisi pengoperasiannya. Gambar 11, 12 dan 13 menunjukkan hasil simulasi untuk motor 3 pada beban konstant (7). Motor yang diberi konverter frekuensi dapat dilihat pada gambar 17. Gambar 15. Arus fasa yang diukur Gambar 14, 15 dan 16 menunjukkan pengukuran tegangan, arus dan torsi untuk beban konstan dengan operasi steady-state (kondisi mantap). Gambar 16. Torsi yang diukur Gambar 11. Simulasi tegangan fasa Gambar 12.Simulasi arus fasa Hasil simulasi dan nilai-nilai yang diukur telah sesuai dan telah dikonfirmasi dengan valid dari elemen-elemen yang telah diidentifikasi pada rangkaian ekivalen. Gambar 17. Motor induksi yang dibebani dengan konvertor frekuensi ______________________________________________________________________ 21 7. Kesimpulan Metode yang diperlihatkan dalam paper ini merupakan turunan parameter pada rangkaian ekivalen yang didasarkan pada single start-up test dan dapat digunakan untuk semua tipe pada motor induksi A test-banch yang didasarkan pada startup test dibuat untuk mengukur perbedaan kuantitas, stator voltages dan currents, power factor, rotor speed dan electromagnetic torque. Dalam rangka menunjukkan keuntungan dari metoda ini, tiga contoh diperkenalkan. Rangkaian ekuivalen dari wound rotor, double cage, dan deep bar motor induksi dengan ukuran daya yang berbeda yang dapat diidentifikasi. Sistem suplai yang diatur, sebuah inverter tegangan, sebuah motor induksi dan sebuah beban listrik telah disimulasikan dengan hasil yang akan dibandingkan secara langsung dengan pengukuran pada sistem ini yang akan dilihat ketepatan dalam pengidentifikasian parameter-parameter. Dibentuknya test-bench dan prosedur pengidentifikasian memberikan penurunan secara otomatis dan cepat pada parameter untuk rangkaian ekivalen motor induksi. Referensi [4] H. Buhler, “Convertisseurs Statiques”, Cllection electricite, Presses polytechniques et universitaires romandes, Lausanne, 1998. [5] J.J. Simond, A. Sapin, B. Kawkabani, D. Schafer, M. Tu Xuan, B. Willy, “Optimized design of variable speed drives based on numerical simulation”, EPE, Trondheim, Norway, 1997. [6] M. . Eigenmann, Ch. Moser, A. Schwery, “Identification informatisee des parametres de machines tournantes a courantalternatif”, Travailpratiquediplome, Laboratoire d’electromecanique et de machines electrques, EPFL, 1999. [7] M.T. Nguyen, M. Tu Xuan, J.J. Simond, “Digital transient torque measurements for rolating or linear AC machines (real time measurement), EPE, 2002, Sevilla (Spain), pp. 1.3191321. Penulis menyelesaikan pendidikan strata satu di Departemen Teknik Elektro Institut Teknologi Bandung (ITB), pendidikan strata dua di Program Pascasarjana Bidang Manajemen dan Industri ITB, dan pendidikan tingkat doktor dalam bidang Manajemen Pendidikan di Universitas Pendidikan Indonesia tahun 2002. Minat penelitiannya dalam bidang mesin-mesin listrik dan kendalinya serta manajemen pendidikan. Sekarang, selain beliau mengajar di Universitas Pendidikan Indonesia juga menjabat sebagai Ketua Jurusan Teknik Elektro UNJANI. [1] Ch. Moser, M. Tu Xuan, A. Schwery, “Stand d’essai automatise’ pour moteurs asynchrones de se’rie”, Travail pratique de diplome, Laboratorie d’electromecanique et de machines electriques, EPFL, 2000. [2] Commission Electrotechnique Internationale (CEI), “Recommandation de la CEI, machines electriques tournantes”, Publication 34-2, Bureau Central de la CEI, Geneve, 2001. [3] Erwin Kreyszig, “Advanced Engineering Mathematics, 7th edition”, John Wiley & Sons, Inc, 1999. 22 Metode Baru Dalam Identifikasi ParameterMotor Induksi (Soemarto) Epsilon : Journal of Electrical Engineering and Information Technology Vol. 1, No. 1, July 2003 ______________________________________________________________________ 23