Kontroler
advertisement

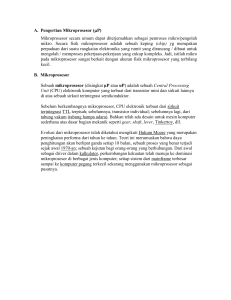
BAB I PENDAHULUAN 1.1 Latar Belakang Pada zaman modern ini, kemajuan teknologi berkembang pesat seiring dengan banyaknya orang yang merasakan manfaatnya. Salah satu aspek dari teknologi yang semakin berkembang adalah bidang kontrol, yang banyak digunakan pada aplikasi-aplikasi di industri. Dalam industri, sering kita temui berbagai sistem instrumentasi untuk menjalankan berbagai mekanisme pada industri tersebut. Dan seiring banyaknya sistem yang harus diawasi, maka diperlukan suatu sistem kontrol untuk mengendalikan sistem tersebut agar dapat berjalan sesuai dengan yang diinginkan. Dalam tiap sistem yang berbeda, dapat diaplikasikan berbagai metode-metode kontrol yang cocok agar dapat dicapai suatu hasil yang maksimal. Oleh karena itu, dalam makalah ini akan dijelaskan beberapa metodemetode kontrol yang dapat digunakan dalam mengendalikan suatu sistem. 1.2 Tujuan Tujuan dibuatnya makalah ini bertujuan untuk menjelaskan secara garis besar mengenai metoda-metoda kontrol yang sering dipakai dan diaplikasikan pada pengendalian suatu sistem. 1 2 BAB II PEMBAHASAN 2.1 Dasar Teori Teori kontrol merupakan suatu ilmu yang mempelajari secara mendalam mengenai perilaku dari suatu sistem dinamis yang memiliki input, dan bagaimana perilaku dari sistem tersebut tersebut dimodifikasi melalui umpan balik. Gambar 2.1 Konsep lup tertutup pengendalian perilaku dari sistem Sehingga, tujuan dari teknik kontrol itu sendiri adalah untuk mengontrol suatu sistem, yang biasa disebut dengan plant, agar menghasilkan output sesuai dengan sinyal kontrol yang diinginkan, yang disebut dengan referensi, yang mana dapat berupa nilai yang tetap ataupun berubah-ubah. Untuk melakukan hal tersebut, kontroler didesain untuk mengawasi hasil keluran dan memandingkannya dengan referensi. Perbedaan antara keluaran yang asli dengan keluaran yang diinginkan, disebut sinyal error, diumpan-balikan ke masukan dari sistem, agar mempengaruhi kontroler untuk menghasilkan keluaran yang mendekati referensi. Sehingga, diperlukan suatu metode-metode kontrol yang diaplikasikan pada kontroler, agar sistem dapat dikendalikan sesuai dengan yang diinginkan. 3 2.2 Pengendalian Sistem Dalam bidang kontrol, terdapat banyak metode-metode yang dapat digunakan untuk mengendalikan suatu sistem. Sebelum melihat hal tersebut, terlebih dahulu perlu dipelajari segi hardware-nya, dimana sistem dapat dikendalikan melalui suatu alat yang telah didesain untuk melakukan suatu perintah kerja sesuai dengan sistem yang digunakan, dimana metode-metode kontrol merupakan suatu algoritma perhitungan berisi perintah-perintah kerja yang diaplikasikan kepada hardware untuk mengendalikan sistem. 2.2.1 Hardware Berikut akan dijelaskan beberapa alat yang sering digunakan sebagai kontroler dalam pengendalian, yaitu Mikrokontroler, Mikroprosesor, Programmable Logic Controller (PLC), dan Personal Computer (PC). A. Mikroprosesor Mikroprosesor adalah sebuah komponen rangkaian elektronik terpadu yang terdiri dari rangkaian aritmatik, logik dan kontrol yang diperlukan untuk menjalankan fungsi-fungsi sebuah CPU (Central Processing Unit) dari sebuah komputer digital. Rangkaian elektronika terpadu tersebut dapat menerjemahkan dan menjalankan instruksi dari sebuah program serta menangani operasi aritmatik. Mikroprosesor merupakan suatu komponen digital jenis LSI (Large Scale Integration) dengan kompleksitas rangkaian sangat tinggi melaksanakan fungsi suatu unit pemroses sentral, CPU. Gambar 2.2 Mikroprosesor yang mampu 4 Gambar 2.3 Bagian-bagian mikroprosesor Mikroprosesor secara umum terdiri dari: ALU (Arithmetic Logic Unit), Control and Timing Unit, dan Array Register (Register Larik). ALU berfungsi sebagai bagian yang melakukan operasi aritmatik dan logika dalam memproses data. Bagian ini yang melakukan operasi bagian dalam mikroprosesor. Sedangkan Register Larik berfungsi untuk menyimpan data sementara hasil proses oleh mikroprosesor. Fungsinya hampir sama dengan piranti memori mikroprosesor dengan perbedaan bahwa memori berada diluar mikroprosesor sedangkan register berada didalam mikroprosesor, memori diidentifikasi dengan alamat sedangkan register diidentifikasi oleh nama register oleh mikroprosesor. Bagian Timing & Control berfungsi sebagai pembangkit daur-waktu untuk antarmuka dengan peripheral pada bus alamat, data dan kontrol. Selain itu mengendalikan bus-bus tambahan lainnya seperti interupsi, DMA dan lain sebagainya, tergantung arsitektur mikroprosesor itu sendiri. Arsitektur mikroprosesor pada saat ini banyak ragamnya, mulai yang paling sederhana hingga yang komplek. Sebagai contoh , 8088 dan 80X8 adalah suatu mokroprosesor. Untuk dapat bekerja, mikroprosessor membutuhkan perangkat pendukung yang dapat berupa RAM, ROM, dan I/O(Input/Output). Bila sebuah mikroprosesor dikombinasikan dengan I/O dan memori, akan dihasilkan mikrokomputer. Pada kenyataannya mengkombinasikan CPU dengan memori dan I/O dapat juga dilakukan dalam level chip yang 5 menghasilkan single chip mikrokomputer untuk membedakannya dengan mikrokomputer. B. Mikrokontroler Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Gambar 2.4 Mikrokontroler 6 Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas instruksi-instruksi yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu yaitu RISC dan CISC. RISC merupakan kependekan dari Reduced Instruction Set Computer. Instruksi yang dimiliki terbatas, tetapi memiliki fasilitas yang lebih banyak. Sebaliknya, CISC kependekan dari Complex Instruction Set Computer. Instruksi bisa dikatakan lebih lengkap tapi dengan fasilitas secukupnya. 7 C. Programmable Logic Controller Programmable Logic Controllers (PLC) adalah komputer elektronik yang mudah digunakan (user friendly) yang memiliki fungsi kendali untuk berbagai tipe dan tingkat kesulitan yang beraneka ragam. Berdasarkan namanya konsep PLC adalah sebagai berikut : Programmable, menunjukkan kemampuan dalam hal memori untuk menyimpan program yang telah dibuat yang dengan mudah diubahubah fungsi atau kegunaannya. Logic, menunjukkan kemampuan dalam memproses input secara aritmatik dan membandingkan, logic (ALU), menjumlahkan, yakni melakukan mengalikan, operasi membagi, mengurangi, negasi, AND, OR, dan lain sebagainya. Controller, menunjukkan kemampuan dalam mengontrol dan mengatur proses sehingga menghasilkan output yang diinginkan. Gambar 2.5 Sistem PLC PLC ini dirancang untuk menggantikan suatu rangkaian relay sequensial dalam suatu sistem kontrol. Selain dapat diprogram, alat ini juga dapat dikendalikan, dan dioperasikan oleh orang yang tidak 8 memiliki pengetahuan di bidang pengoperasian komputer secara khusus. PLC ini memiliki bahasa pemrograman yang mudah dipahami dan dapat dioperasikan bila program yang telah dibuat dengan menggunakan software yang sesuai dengan jenis PLC yang digunakan sudah dimasukkan. Secara umum fungsi PLC adalah sebagai berikut: Sekuensial Control. PLC memproses input sinyal biner menjadi output yang digunakan untuk keperluan pemrosesan teknik secara berurutan (sekuensial), disini PLC menjaga agar semua step atau langkah dalam proses sekuensial berlangsung dalam urutan yang tepat. Monitoring Plant. PLC secara terus menerus memonitor status suatu sistem (misalnya temperatur, tekanan, tingkat ketinggian) dan mengambil tindakan yang diperlukan sehubungan dengan proses yang dikontrol (misalnya nilai sudah melebihi batas) atau menampilkan pesan tersebut pada operator. Shutdown System. Prinsip kerja sebuah PLC adalah menerima sinyal masukan proses yang dikendalikan lalu melakukan serangkaian instruksi logika terhadap sinyal masukan tersebut sesuai dengan program yang tersimpan dalam memori lalu menghasilkan sinyal keluaran untuk mengendalikan aktuator atau peralatan lainnya.. Terdapat lima tipe bahasa pemrograman yang bisa dipakai untuk memprogram PLC, meski tidak semuanya di-support oleh suatu PLC, yaitu antara lain : 1. Bahasa pemrograman Ladder Diagram (LD) 2. Bahasa pemrograman Instruction List (IL)/Statement List (SL) 3. Bahasa pemrograman Sequential Function Chart (SFC)/Grafcet 4. Bahasa pemrograman Function Block Diagram (FBD) 9 5. Bahasa pemrograman tingkat tinggi (high-level), contohnya Visual Basic D. Personal Computer Personal Computer adalah seperangkat komputer yang digunakan oleh satu orang saja / pribadi. Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna). Personal Computer dibagi menjadi 3 bagian yang penting yaitu: Hardware (perangkat keras) Hardware adalah sekumpulan komponen perangakat keras komputer yang secara fisik bisa dilihat, diraba, dirasakan. Hardware ini dibagi menjadi 5 (lima) bagian, yaitu: - Input Device, peralatan masukkan (Keyboard,mouse,dll), - Process Device, peralatan proses (processor, motherboard, ram, dll), - Output Device, peralatan keluaran (Monitor, Printer, dll), - Storage Device, peralatan penyimpan (harddisk,flashdisk, dll), - Peripheral Device, peralatan tambahan (WebCam, modem, dll), Software (Perangkat Lunak) Software adalah program yang berisi instruksi/perintah sebagai pelantara yang menghubungkan (menjembatani) antara hardware dan brainware (perangkat manusia) sehingga dapat menghasilkan informasi yang diinginkan brainware. Software dapat dikategorikan menjadi dua kelompok. Software Operating System (OS), Contohnya adalah Windows, Linux, Dos, Android, dll. Tanpa adanya Operating System ini, maka hardware hanyalah benda mati yang tidak bisa digunakan. 10 Software Application System, Contohnya dalam programming yaitu Matlab, Codevision AVR, Visual Studio, dll Brainware (Perangkat Manusia/pengguna/user) Brainware adalah perangkat yang mengoperasikan dan menjalankan perangkat lunak yang ada didalam komputer. Brainware dikelompokkan menjadi beberapa kategori mulai dari pembuat program (programmer), Technical Support, Designer Graphic, Operator, sampai user paling awam sekalipun. 11 2.2.2 Metoda-Metoda Kontroler Berikut akan dijelaskan beberapa metode-metode pengendalian yang sering digunakan dalam mengendalikan sistem, yaitu kendali ON-OFF, kendali PID, kendali Cerdas, kendali Optimal, kendali Adaptif, kendali Robust, dan kendali Stokastik. A. Kendali ON-OFF Aksi kontrol dua posisi atau on-off. Dalam sistem kontrol dua posisi, elemen pembangkit hanya mempunyai dua posisi tertentu yaitu on dan off. Kontrol dua posisi atau on-off relatif sederhana dan tidak mahal dan dalam hal ini sangat banyak digunakan dalam sistem kontrol industri maupun domestik. Ambil sinyal keluaran dan kontroler u(t) tetap pada salah satu nilai maksimum atau minimum tergantung apakah sinyal pembangkit kesalahan positif atau negatif, sehingga, u(t) = U1 untuk e(t) > 0 = U2 untuk e(t) < 0 dengan U1 dan U2 konstan. Nilai minimum U2 biasanya nol atau –U1 Berikut adalah contoh aplikasi kendali on-off untuk sistem pengatur suhu Gambar 2.6 Sistem pengatur suhu Sinyal keluaran secara terus-menerus bergerak antara dua batas yang diperlukan untuk membuat elemen pembangkit bergerak dari satu posisi ke posisi lainnya. Posisi antara suhu cut-off dan suhu cut-on disebut jurang differensial. 12 B. Kendali PID Sistem Kontrol PID (Proportional–Integral–Derivative controller) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut Sistem kontrol PID terdiri dari tiga buah cara pengaturan yaitu kontrol P (Proportional), D (Derivative) dan I (Integral), dengan masingmasing memiliki kelebihan dan kekurangan. Dalam implementasinya masing-masing cara dapat bekerja sendiri maupun gabungan diantaranya. Dalam perancangan sistem kontrol PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran system terhadap masukan tertentu sebagaimana yang diinginkan Berikut adalah diagram blok dari kontrol PID Gambar 2.7 Kontrol PID Persamaan dari pengontrol PID dapat ditulis sebagai berikut Dimana 13 Untuk lebih jelasnya, berikut adalah pembahasan untuk tiap parameter kontrol PID 1. Kontrol Proposional Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Berikut adalah persamaan matematis kontrol proporsional dan diagram bloknya Gambar 2.8 Kontrol Proportional Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time. Pengontrol proporsional memiliki keluaran yang sebanding/proporsional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya). Ciri-ciri pengontrol proporsional : Jika nilai Kp kecil, pengontrol proporsional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat (menambah rise time). Jika nilai Kp dinaikkan, respon/tanggapan sistem akan semakin cepat mencapai keadaan mantapnya (mengurangi rise time). Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil atau respon sistem akan berosilasi. Nilai Kp dapat diset sedemikian sehingga mengurangi steady state error, tetapi tidak menghilangkannya. 14 2. Kontrol Integral Pengontrol Integral berfungsi menghasilkan respon sistem yang memiliki error steady state nol. Jika sebuah pengontrol tidak memiliki unsur integrator, pengontrol proporsional tidak mampu menjamin keluaran sistem dengan error steady state nol. Berikut adalah persamaan dan diagram blok dari kontrol Integral Gambar 2.9 Kontrol Integral Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun menyebabkan respon pemilihan Ki transien yang yang tidak tepat tinggi sehingga dapat dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde system Keluaran pengontrol ini merupakan hasil penjumlahan yang terus menerus dari perubahan masukannya. Jika sinyal kesalahan tidak mengalami perubahan, maka keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran pengontrol integral merupakan luas bidang yang dibentuk oleh kurva kesalahan / error. Ciri-ciri pengontrol integral : Keluaran pengontrol integral membutuhkan selang waktu tertentu, sehingga pengontrol integral cenderung memperlambat respon. Ketika sinyal kesalahan berharga nil, keluaran pengontrol akan bertahan pada nilai sebelumnya. 15 Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki. Konstanta integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran pengontrol. 3. Kontrol Derivatif Keluaran pengontrol diferensial memiliki sifat seperti halnya suatu operasi derivatif. Perubahan yang mendadak pada masukan pengontrol akan mengakibatkan perubahan yang sangat besar dan cepat. Ketika masukannya tidak mengalami perubahan, keluaran pengontrol juga tidak mengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak dan menaik (berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan berubah naik secara perlahan (fungsi ramp), keluarannya justru merupakan fungsi step yang besar magnitudenya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan factor konstanta Kd. Berikut adalah persamaan dan diagram blok dari kontrol derivatif Gambar 2.10 Kontrol Derivatif Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai G(s)=s.Kd Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks “kecepatan” atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi. Kontrol 16 Derivative hanya berubah saat ada perubahan error sehingga saat error statis kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative tidak dapat dipakai sendiri. Ciriciri pengontrol derivatif : Pengontrol tidak dapat menghasilkan keluaran jika tidak ada perubahan pada masukannya (berupa perubahan sinyal kesalahan) Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan pengontrol tergantung pada nilai Kd dan laju perubahan sinyal kesalahan. Pengontrol diferensial mempunyai suatu karakter untuk mendahului, sehingga pengontrol ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi pengontrol diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif dan cenderung meningkatkan stabilitas sistem. Dengan meningkatkan nilai Kd, dapat meningkatkan stabilitas sistem dan mengurangi overshoot. Setiap kekurangan dan kelebihan dari masing-masing pengontrol P, I dan D dapat saling menutupi dengan menggabungkan ketiganya secara paralel menjadi pengontrol proporsional plus integral plus diferensial (pengontrol PID). Elemen-elemen pengontrol P, I dan D masing-masing secara keseluruhan bertujuan : mempercepat reaksi sebuah sistem mencapai set point--nya menghilangkan offset menghasilkan perubahan awal yang besar dan mengurangi overshoot. 17 C. Kendali Cerdas Kendali cerdas merupakan metode kontrol yang menggunakan berbagai pendekatan perhitungan dengan menggunakan kecerdasan buatan (Artificial Intelligence). Tujuan utama dari metode pengendali ini adalah untuk menghasilkan kontroler yang mampu berpikir seperti layaknya manusia, sehingga sistem yang dikontrol mampu menghasilkan keluaran sesuai dengan apa yang pengguna inginkan. Banyak sekali cabang dari kendali cerdas, dan berikut yang sering banak diaplikasikan dalam dunia industri, yaitu 1. Artificial Neural Network Control Merupakan model perhitungan yang terinspirasi oleh jaringan saraf dari otak, dan digunakan untuk mengestimasi fungsi yang tergantung pada jumlah input yang banyak dan biasanya tidak diketahui. Berikut adalah contoh tampilan dari jaringan saraf buatan Gambar 2.11 Jaringan saraf buatan Sebelum suatu Jaringan Neural Buatan (JNB) digunakan , terlebih dahulu patut diperhatikan hal-hal berikut: Pola koneksi antar tiap layer Proses pembelajaran dan penentuan nilai bobot dari interkoneksi Fungsi aktivasi yang merubah input berbobot ke aktivasi outputnya. Pada proses pembelajaran terdapat beberapa metode yaitu metode Hebb, Perceptron, Adaline/Madaline, Backpropagation. 18 2. Fuzzy Logic Control Logika fuzzy adalah suatu metode tepat untuk memetakan suatu ruang input dalam ruang output dan memiliki nilai berlanjut. Menggunakan teori himpunan fuzzy, dimana membership function menjadi ciri utama dalam penalaran logika fuzzy. Berikut contoh penalaran fuzzy Gambar 2.12 Penggolongan umur manusia Bila dikategorikan orang dengan umur kurang dari 35 adalah MUDA, antara 35 dan 65 adalah PAROBAYA, dan lebih dari 65 adalah TUA, jika menggunakan logika crisp (tegas), maka orang yang berumur 35 lebih satu hari saja akan digolongkan PAROBAYA dan tidak MUDA lagi. Sedangkan jika mengunakan logika Fuzzy, orang tersebut termasuk pada kategori MUDA dan PAROBAYA, layaknya pikiran manusia. Ada banyak manfaat untuk menggunakan logika fuzzy. Logika fuzzt adalah konseptual mudah dipahami dan memiliki pendekatan alami. Logika fuzzy fleksibel dan dapat dengan mudah ditambah dan disesuaikan. Hal ini sangat toleran terhadap data yang tidak tepat dan terhadap model yang nonlinier/ kompleksitas sedikit. Hal ini juga bisa dicampur dengan teknik kontrol konvensional. Ada tiga komponen utama dari sistem fuzzy: set fuzzy, aturan fuzzy, dan bilangan fuzzy. 19 3. Genetic Algorithm Control Algoritma genetika merupakan suatu algoritma pencarian yang menirukan proses seleksi alamiah yang dikenal dengan proses evolusi, dimana individu akan mengalami perubahan gen menyesuaikan keadaan. Hal-hal yang perlu diperhatikan dalam melakukan algoritma genetika adalah sebagai berikut Mendefinisikan individu, dimana individu menyatakansalah satu solusi (penyelesaian) yang mungkin dari permasalahan yang diangkat. Mendefinisikan nilai fitness, yang merupakan ukuran baiktidaknya sebuah individu atau baik-tidaknya solusi yang didapatkan. Menentukan proses pembangkitan populasi awal. Hal ni biasanya dilakukan dengan menggunakan pembangkitan acak seperti random-walk. Menentukan proses seleksi yang akan digunakan. Menentukan proses perkawinan silang (cross-over) dan mutasi gen yang akan digunakan. D. Kendali Optimal Kendali optimal adalah suatu proses pengendalian untuk menentukan suatu kontrol pada system dinamis selama waktu yang diberikan untuk meminimalisirkan indeks kinerja-nya. Secara sederhana, tujuan kendali optimal adalah untuk menghasilkan keluaran yang baik dengan kerugian yang sedikit. Untuk menyelesaikan permasalahan optimal, diperlukan formulasi dari permasalahan tersebut, yang dapat disusun dengan syarat sebagai berikut 20 Membutuhkan persamaan model matematis dari system yang ingin dikontrol, Spesifikasi dari indeks kinerja, Spesifikasi dari kondisi-kondisi yang membatasi, dan Kendala-kendala yang harus dipenuhi, serta variable apa saja yang dapat digunakan. Ada dua metode desain sistem kendali optimal yang sering digunakan pada aplikasi industry, karena menjamin kestabilitasan luptertutup yaitu Model Predictive Control dan Linear Quadratic Gaussian Control. 1. Model Predictive Control Metode MPC adalah metode kontrol proses yang mampu mengoptimalisasikan penggunaan waktu saat system bekerja, dengan mempertimbangkan penggunaan waktu pada kedepannya, sehingga MPC mampu mengantisipasi kejadian yang akan datang, dan melakukan aksi kontrol yang sesuai. Metode ini lebih memperhatikan efek kendala pada sinyal dari sistem, yang mana merupakan fitur yang penting pada banyak proses-proses di dunia industri. Aka tetapi, struktur ‘kontrol optimal’ pada MPC hanya mempengaruhi hal itu saja, karena tidak mengoptimalkan indeks kinerja sebenarnya dari sistem kontrol lup tertutup. Akan tetapi, dengan ditambahkan kontroler PID, sistem MPC menjadi teknik kontrol yang sering digunakan pada kontrol proses. 2. Linear Quadratic Gaussian Control Permasalahan Linear Quadratic Gaussian Control merupakan salah satu permasalahan yang paling penting pada kontrol optimal. Kontroler LQG merupakan kombinasi dari filter Kalman dengan Linear Quadratic Regulator (LQR), dimana filter Kalman merupakan 21 algoritma penghitungan yang mengobservasi noise dan ketidakakurataan lainnya selama periode waktu, dan menghasilkan estimasi dari variable yang tidak diketahui tersebut, sedangkan LQR adalah kontroler feedback yang mengoperasikam sistem dinamis (yang direpresentasikan dalam persamaan differensial linear) pada kinerja (yang direpresentasikan dalam fungsi kuadrat) yang minimum. E. Kendali Adaptif Sesuai dengan namanya, kendali adaptif adalah kendali yang dapat beradaptasi terhadap perubahan, baik terhadap lingkungan eksternal maupun internalnya, untuk mempertahankan kinerja dan stabilitas sistem dengan memodifikasi parameter-parameter dari sistem. Pondasi dari kontrol adaptif adalah estimasi parameter. Metode umum untuk estimasi termasuk Recursive Least Square dan Gradient Descent. Kedua metode diatas memberikan update laws yang digunakan untuk memodifikasi estimasi tersebut pada saat real time, sebagai contoh saat sistem sedang beroperasi.. Kestabilan Lyapunov digunakan untuk menndapatkan update laws ini, dan memperlihatkan kriteria konvergen. Proyeksi matematis dan normalisasi digunakan agar algoritma estimasi lebih robust. Berikut merupakan tipe-tipe dari kontrol adaptif yang sering digunakan, yaitu 1. Model Reference Adaptive Control (MRAC) Kendali adaptif model acuan (AMA) digunakan dalam sistem kendali untuk memaksakan agar proses kendalian berperilaku seperti model acuan (model reference). Pada kasus ini proses kendalian umumnya mempunyai karakteristik yang buruk seperti tanggapan yang lambat dan kestabilan yang kurang mantap. Selain itu karakteristik proses kendalian sering berubah-ubah bahkan terkadang 22 menuju kondisis operasi yang tidak stabil. Oleh karena itu kendali AMA dirancang agar proses kendalian mengikuti perilaku model acuan yang mempunyai tanggapan yang lebih cepat dan kestabilan yang lebih mantap. Berikut merupakan diagram blok dari kendali model acuan Gambar 2.13 Diagram blok kendali model acuan 2. Self-Tuning Adaptive Control Kendali adaptif swa-tala (AST) merupakan sistem kendali yang mempunyai parameter-parameter yang dapat ditala (dituning) sesuai dengan perubahan kondisi eksternal dan internal proses kendalian. Sistem kendali AST mengestimasi parameter-parameter proses kendalian secara on-line. Dari data hasil estimasi tersebut, parameter kontroler ditala sedemikian hingga karakteristik proses kendalian menjadi lebih baik. Bila parameter proses berubah akibat perubahan lingkungan operasi plant, maka estimasi parameter juga berubah secara on-line, sehingga parameter kontroler ditala kembali sedemikian hingga karakteristik yang diharapkan dapat dipertahankan. Berikut adalah diagram blok dari kendali swatala Gambar 2.14 Diagram blok kendali adaptif swa-tala 23 3. Adaptive Gain Scheduling Kendali penjadwalan gain adaptasi (PGA) merupakan kendali yang paling banyak digunakan dalam industri pengolahan dan manufaktur. Kendali ini bekerja dengan mengadaptasi gain kendali sesuai dengan perubahan kondisi operasi suatu proses di industri. Kendali ini juga telah digunakan pada kendali penerbangan dimana gain kendali berubah sesuai perubahan kondisi terbang. Berikut adalah diagram blok dari kendali penjadwalan gain adaptif Gambar 2.15 Diagram blok kendali penjadwalan gain adaptif F. Kendali Robust Kendali robust secara spesifik digunakan untuk mengatasi ketidakjelasan (uncertainty) pada desain kontrolernya. Metode kontrol robust didesain agar dapat berfungsi sesuai dengan yang diinginkan, selama parameter yang tidak jelas tersebut masih masuk dalam batasan yang telah diperhitungkan. Tujuan kendali robust adalah untuk mendapatkan sistem kontrol dengan kinerja dan/atau stabilitas yang robust, dengan adanya eror pemodelan dalam batas yang sudah diperhitungkan. Dibanding dengan kontrol adaptif, dimana dia beradpatasi dengan variasi yang terjadi, kontrol robust didesian agar dapat bekerja dengan mengansumsikan bahwa variable tertentu tersebut tidak diketahui, tapi berada dalam batasan. Berikut adalah beberapa metode-metode kontrol robust, yaitu 24 1. H-infinity loop-shaping Dikembangkan oleh Duncan McFarlane dan Keith Glover. Metode ini meminimalisir sensitivitas dari system dengan melihat spectrum frekuensinya, sehingga menjamin bahwa system tidak akan melenceng jauh dari lintasan yang diperkirakan ketika gangguan diberikan pada sistem 2. Sliding Mode Control Merupakan metode kontrol robust yang banyak diaplikasikan ke berbagai bidang dikarenakan desain yang terbilang sederhana dengan robustness yang baik. 3. Loop Transfer Recovery Merupakan pengembangan dari kontrol LQG (Linear Quadratic Gaussian) untuk mengatasi masalh robustness-nya Masih terdapat metode-metode lain seperti Quantitative Feedback Theory, Gain Scheduling, Back Stepiping, Feedback Linearisation, dsb. G. Kendali Stokastik Kendali stokastik adalah suatu kendali yang mengurusi tentang keberadaan dari suatu ketidakjelasan (uncertainty) baik pada pengamatan data maupun pada sesuatu yang memiciu evolusi dari data tersebut. Dalam desainnya, diasumsikan bahwa random noise dngan distribusi probabilitas yang diketahui mempengaruhi evolusi dan observasi dari variable-variable state-nya. Sehingga, kontrol stokastik bertujuan untuk mendesain suatu jalur waktu dari variable terkontrol yang bekerja ada kinerja kontrol yang diingkinkan dengan rugi minimal, namun tetap, walau adanya noise tersebut. 25 BAB III PENUTUP 3.1 Kesimpulan 1. Teori Kontrol merupakan suatu ilmu yang mempelajari tentang perilaku sistem dinamis yang mempunyai input, dan bagaimana perilaku tersebut dimodifikasi melalui umpan balik.. 2. Mikroprosesor adalah sebuah komponen rangkaian elektronik terpadu yang terdiri dari rangkaian aritmatik, logik dan kontrol yang diperlukan untuk menjalankan fungsi-fungsi sebuah CPU (Central Processing Unit) dari sebuah komputer digital. 3. Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data 4. Programmable Logic Controllers (PLC) adalah komputer elektronik yang mudah digunakan (user friendly) yang memiliki fungsi kendali untuk berbagai tipe dan tingkat kesulitan yang beraneka ragam. 5. Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna) 6. Kendali on-off merupakan metode pengendali dengan elemen pembangkitnya hanya memiliki dua posisi tertentu, yaitu keadan ON dan keadaan OFF. 7. Merupakan kontroler untuk menentukan kepresisian dari suatu system, dengan memanfaatkan 3 buah cara pengaturan yakni kontrol Proportion, Integral dan Derivative, dan menghasilkan keluaran dengan keuntungan dari tiap kontrol tersebut. 26 8. Kendali cerdas merupakan metode kontrol yang menggunakan berbagai pendekatan perhitungan dengan menggunakan kecerdasan buatan (Artificial Intelligence) 9. Kendali optimal adalah proses untuk menentukan suatu kontrol pada system dinamis selama waktu yang diberikan untuk meminimalisirkan indeks kinerja-nya. 10. Kendali adaptif adalah kendali yang dapat beradaptasi terhadap perubahan, baik terhadap lingkungan eksternal maupun internalnya, untuk mempertahankan kinerja dan stabilitas sistem dengan memodifikasi parameter dari sistem tersebut. 11. Metode kontrol robust adalah metode yang mengatasi masalah ketidakjelasan dan didesain agar dapat berfungsi sesuai dengan yang diinginkan, selama parameter yang tidak jelas tersebut masih masuk dalam batasan yang telah diperhitungkan 12. Adalah suatu kendali yang mengurusi tentang keberadaan dari suatu ketidakjelasan (uncertainty) baik pada pengamatan data maupun pada sesuatu yang memiciu evolusi dari data tersebut. 27 DAFTAR PUSTAKA http://en.wikipedia.org/wiki/Control_theory http://cahangkon.blogspot.com/2012/04/mikroperosesor.html http://ilmanopudi.blogspot.com/2013/01/plc-programmable-logic-controller.html http://pakdevakeren.blogspot.com/2013/08/pengertian-dan-fungsi-personalcomputer.html http://putraekapermana.wordpress.com/2013/11/21/pid/ http://en.wikipedia.org/wiki/Neural_networks http://fahmizaleeits.wordpress.com/tag/logika-fuzzy-adalah-suatu-proses/ http://en.wikipedia.org/wiki/Optimal_control http://en.wikipedia.org/wiki/Adaptive_control http://electrical.arifhidayatullah.com/2012/12/pengertian-kendali-adaptif.html http://en.wikipedia.org/wiki/Robust_control http://en.wikipedia.org/wiki/Stochastic_control