bab i pendahuluan
advertisement

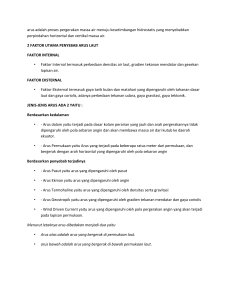
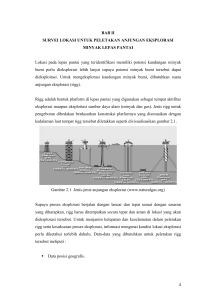
BAB I PENDAHULUAN I.1 Latar Belakang Dermaga merupakan salah satu fasilitas di pelabuhan yang memiliki fungsi sebagai tempat kapal merapat dan bertambat sehingga mempermudah kegiatan perpindahan barang dan penumpang. Dalam perencanaan pembangunan dermaga harus memperhitungkan faktor-faktor yang akan mempengaruhi kestabilan bangunan dermaga serta keamanan kapal-kapal yang berlabuh, faktor-faktor tersebut adalah angin, gelombang dan pasang surut (Triatmodjob, 2003). Pasang surut menjadi faktor yang harus diperhitungkan karena kejadiannya yang bersifat periodik dan pasti mempengaruhi bangunan dermaga, baik pada saat persiapan, pembangunan maupun pemakaian. Produk pasang surut yaitu highest high water level (HHWL) merupakan komponen dasar dalam perhitungan design water level (DWL) untuk menentukan nilai elevasi dermaga. Nilai HHWL ditentukan berdasarkan pengamatan pasang surut selama minimal 15 hari, dimana data pasang surut 15 hari dianggap telah mencakup satu siklus pasang surut yaitu pasang purnama hingga pasang perbani (Triatmodjoa, 2003). Di Indonesia sendiri pengamatan pasang surut untuk keperluan praktis seperti perencanaan bangunan pantai hanya dilakukan selama 15 piantan (seri pendek) atau 29 piantan (seri panjang) (Poerbandono dan Djunarsjah, 2005). Pasal 8 ayat 2 Peraturan Pemerintah Republik Indonesia Nomor 61 tahun 2009 tentang kepelabuhan menegaskan bahwa Menteri menetapkan rencana induk pelabuhan termasuk didalamnya hal pengoperasian pelabuhan secara aman untuk jangka waktu 20 tahun. Selanjutnya setelah periode tersebut akan dilakukan pengontrolan setiap 5 tahun sekali. Berdasarkan uraian di atas maka dalam perencanaan pembangunan dermaga di Indonesia, data pasut dengan lama pengamatan 15 hari atau 30 hari dianalisis harmonik dan dihitung nilai HHWL nya sehingga didapat nilai elevasi dermaga yang dinyatakan aman untuk jangka waktu panjang. Kontrol keamanan elevasi dermaga merupakan nilai 1 2 HHWL dari data pasut hasil prediksi hingga jangka waktu panjang. Suatu dermaga dinyatakan aman jika tidak tergenang air laut, dan menurut standar kriteria desain pelabuhan Indonesia (1984) batas aman tinggi HHWL adalah maksimal 30 cm di bawah lantai dermaga yang nilainya bereferensi terhadap MSL. Tinggi air pada pengamatan pasut merupakan resultan dari berbagai gelombang (konstanta pasut) yang dominan dibangkitkan akibat adanya gaya gravitasi bumi dengan bulan dan matahari. Benda-benda langit tersebut masing-masing bergerak dengan siklusnya yang membentuk pola harmonik sederhana dengan periode yang tetap (NN., 2010 dalam Perbani, 2010). Jika periode suatu konstanta pasut tetap maka frekuensinya juga tetap, sedangkan yang selalu berubah adalah nilai amplitudo dan fasenya. Sebagai data diskret, data pasut akan membatasi konstanta pasut yang dapat dianalisis. Panjang pengamatan pasut memegang peranan penting dalam analisis harmonik sehingga dapat memisahkan konstanta-konstanta pasut satu sama lain dengan baik. Namun jika ketersediaan data pengamatan pasut hanya dalam periode pendek, maka jumlah konstanta pasut yang dapat dianalisis sedikit. Selanjutnya dalam perhitungan prediksinya pun hanya akan melibatkan konstanta-konstanta pasut yang nilainya masih terkontaminasi oleh energi konstanta pasut lain yang tidak terwakili (Perbani, 2010). Data hasil prediksi tidak akan bisa merekonstruksi kejadian-kejadian yang mempengaruhi tinggi pasut selama jangka waktu panjang, karena data masukannya merupakan data tidak stabil yang hanya menggambarkan fenomena pembangkit pasut pada periode pendek seperti fraksi setengah bulan atau satu bulan. Penggunaan data pasut periode pendek untuk penentuan elevasi dermaga sebelumnya pernah dilakukan. Elevasi dermaga dihitung berdasarkan nilai high water spring (HWS) dari data pengamatan pasut selama satu tahun. Sedangkan sebagai kontrol keamanannya adalah nilai perkiraan kenaikan muka air laut dan nilai HWS pada tiga tahun ke depan yang didapat dari data pasut hasil prediksi (Rachmayanti, dkk, 2011). Namun demikian, data pasut hasil prediksi tidak diuji keandalannya sehingga tidak diketahui apakah nilai HHWL yang digunakan sebagai kontrol keamanan sudah benar. 3 Sehubungan dengan itu maka perlu adanya penelitian mengenai pengaruh periode data pasut terhadap hasil nilai elevasi dermaga dan nilai HHWL sebagai kontrol keamanannya. Penulis dalam penelitian ini membandingkan nilai HHWL dari masing-masing data pasut berbeda periode pengamatan dengan nilai elevasi dermaga yang dihasilkan. Data pasut dikelompokkan menjadi lima kelompok berdasarkan periode pergerakan bumi, bulan, dan matahari, yaitu 15 hari, 30 hari, 1 tahun, 8,85 tahun, dan 18,6 tahun. Nilai HHWL merupakan hasil penjumlahan nilai muka air laut rerata dan amplitudo konstanta utama pasut yang didapat dari analisis harmonik dan prediksi pasut dengan metode least square. Nilai konstanta pasut dari data pasut hasil prediksi dianalisis tingkat presisinya terhadap nilai konstanta pasut dari data pengamatan asli menggunakan uji statistik. Dari proses tersebut maka diketahui apakah data pasut periode pendek dapat digunakan untuk penentuan nilai elevasi dermaga yang aman serta periode data pasut yang optimal untuk melakukan prediksi jangka panjang. Berkenaan dengan pelaksanaan penelitian tersebut, kelengkapan data pasut dengan lama pengamatan minimal 18,6 tahun sangat dibutuhkan. Stasiun pasang surut Jepara milik Badan Informasi Geospasial (BIG) yang terletak di 6˚35’30” LS, 110˚38’51” BT merupakan salah satu stasiun pasut yang memiliki data pasut dengan lama pengamatan selama 20 tahun terhitung dari tahun 1994. Selain karena ketersediaan data pasut dengan lama pengamatan yang panjang, area perairan Jepara dipilih sebagai lokasi penelitian karena sekitar 120 meter ke barat dari stasiun pasut Jepara terdapat dermaga Pantai Kartini yang berfungsi khusus sebagai dermaga kapal ferry. Dermaga tersebut merupakan dermaga skala regional yang penting peranannya dalam bidang transportasi laut dan perekonomian di pulau Jawa. I.2 Rumusan Masalah Data pasut periode pendek merupakan data pasut yang tidak stabil, karena tidak semua pengaruh fenomena pergerakan benda-benda langit terkandung di dalamnya. Selain itu nilai amplitudo konstanta pasut hasil analisis harmoniknya masih tercampur 4 dengan nilai konstanta pasut lain yang tidak dapat dipisahkan. Sedangkan untuk kepentingan praktis khususnya perencanaan bangunan dermaga, data pasut periode pendek biasa digunakan untuk mengitung nilai HHWL dalam penentuan elevasi dermaga sekaligus sebagai nilai kontrol keamanannya untuk jangka waktu panjang. Berdasarkan uraian rumusan masalah di atas maka dalam penelitian ini ditentukan beberapa pertanyaan ilmiah sebagai berikut: 1. Bagaimana pengaruh periode pengamatan pasut berdasarkan sistem pergerakan bumi, bulan, dan matahari terhadap nilai MSL dan amplitudo konstanta pasut serta data pasut hasil prediksinya ? 2. Bagaimana hubungan nilai HHWL dari data pasut periode 15 hari, 30 hari, 1 tahun, 8,85 tahun dan 18,6 tahun dan prediksinya selama 18,6 tahun terhadap nilai elevasi dermaga yang dihasilkan ? 3. Berapa lama periode data pasut yang optimal untuk prediksi data pasut selama 18,6 tahun? I.3 Tujuan Penelitian Tujuan yang ingin dicapai dalam penelitian ini adalah sebagai berikut : 1. Menganalisis pengaruh lama pengamatan data pasut berdasarkan sistem pergerakan bumi, bulan dan matahari terhadap nilai MSL dan amplitudo konstanta pasut serta data pasut hasil prediksinya. 2. Menganalisis hubungan nilai HHWL dari masing-masing kelompok data pasut berdasarkan pergerakan bumi, bulan, dan matahari dan data pasut prediksinya selama 18,6 tahun terhadap nilai elevasi dermaga yang dihasilkan. 3. Menentukan periode data pasut yang optimal untuk prediksi pasut selama 18,6 tahun ke depannya. 5 I.4 Manfaat Penelitian Manfaat yang didapat dari penelitian ini adalah dihasilkan evaluasi perbandingan nilai elevasi muka air laut acuan dan nilai elevasi dermaga dari kelompok data prediksi dengan kelompok data asli pengamatan 18,6 tahun. Diharapkan hasil penelitian ini dapat dijadikan salah satu bahan pertimbangan pembuatan kebijakan khususnya dibidang rekayasa mengenai perencanaan pembangunan bangunan pantai di daerah perairan Jepara dan sekitarnya. I.5 Batasan Masalah Batasan masalah dalam penelitian ini adalah sebagai berikut : 1. Data pasang surut yang digunakan adalah data pasang surut di perairan Jepara selama periode 19 tahun dari tahun 1994 sampai tahun 2012 yang sudah divalidasi oleh BIG. 2. Pengolahan data pasang surut menggunakan metode least square dan tanpa ada proses interpolasi pada data kosong. 3. DWL ditentukan berdasar HHWL dan nilai SLR (sea level rise) global dengan tidak memperhitungkan nilai storm surge atau wind set-up. 4. Nilai batas keamanan elevasi dermaga sesuai dengan kriteria desain pelabuhan Indonesia (1984) untuk dermaga yang melayani kapal kecil. I.6 Tinjuan Pustaka Penelitian dengan topik yang hampir serupa telah pernah dilakukan yaitu, Rachmayanti, dkk (2011) melakukan penelitian mengenai penentuan HWS (High Water Spring) dengan menggunakan komponen pasut untuk penentuan elevasi dermaga. Penelitian tersebut menggunakan data pasut perairan Teluk Lamong dengan periode satu tahun selama tahun 2007. Data pasut diolah dengan metode least square menggunakan software WXTide 32 dan Qinsy 7.5, sehingga menghasilkan nilai amplitudo delapan komponen pasut yaitu M2, S2, N2, K1, O1, MS4, dan M4 dengan M2 dan K1 merupakan komponen yang lebih mendominan dibandingkan dengan komponen yang 6 lain. Nilai amplitudonya sebesar 42,4 cm untuk komponen M2 dan 41,5 cm untuk komponen K1. Pada penelitian tersebut elevasi muka air laut yang dipilih sebagai acuan adalah HWS dengan nilai sebesar 2,884 meter. Prediksi elevasi air laut juga dilakukan untuk periode tahun 2010, pada data prediksi tahun 2010 didapatkan nilai HWS sebesar 283,4 cm, dari nilai tersebut dapat diketahui bahwa terjadi penurunan sebesar 5 cm apabila dibandingkan dengan HWS tahun 2007. Elevasi dermaga ditentukan sesuai Standar Kriteria Desain untuk Pelabuhan Indonesia (1984) dan mengacu pada peta batimetri area rencana dermaga dengan kedalaman yang dikehendaki sebesar 20 meter. Elevasi dermaga dihitung menggunakan nilai HWS tahun 2007 dengan tidak memperhitungkan nilai storm surge dan kenaikan muka air laut (sea rise level) akibat pemanasan global, sehingga elevasi dermaga yang dihasilkan adalah 4,884 meter. Berdasarkan hasil nilai HWS data prediksi pasut tahun 2010 serta nilai perkiraan kenaikan muka air laut pada tahun 2050 yaitu sebesar 0,25-0,5 meter, maka nilai elevasi dermaga yang dihasilkan masih berada di batas aman, karena lantai dermaga tidak mengalami banjir saat terjadi pasang tinggi. Selain itu terdapat beberapa penelitian lainnya mengenai analisis pasang surut laut yang dijadikan sebagai rujukan sekaligus pembanding diantaranya adalah, Sinaga (2010) dengan penelitiannya yang bertema analisis perbandingan antara data pasut dan prediksi pasut untuk pendefinisian LAT. Penelitian tersebut menggunakan data pasut selama tahun 1985-2003 dari empat stasiun pasut yaitu, stasiun pasut pulau Christmas, stasiun pasut Perancis, stasiun pasut Galveston, dan stasiun pasut Guam. Koreksi data meliputi koreksi spike dan koreksi data kosong. Koreksi data kosong dilakukan dengan interpolasi menggunakan metode polynomial derajat enam dan sesuai toleransi BIG yaitu, panjang data kosong yang diperbolehkan diinterpolasi tidak lebih dari 24 jam. Proses prediksi pasut dilakukan dengan metode least square menggunakan data pasut selama satu tahun pertama untuk memprediksi tinggi muka air laut selama 18,6 tahun kedepannya. Nilai LAT ditentukan dengan cara mencari nilai terendah dari keseluruhan data disetiap set data, hasilnya dapat dilihat pada tabel I.1. 7 Tabel I.1 Nilai LAT data pengamatan dan data prediksi empat stasiun pasut Stasiun Pasut Data Pengamatan Data Prediksi Periode LAT (cm) Periode LAT (cm) Pulau Christmas 1985-2003 -9 1986-2004 171 Prancis 1985-2003 204 1986-2004 356 Galveston 1985-2003 240 2001-2019 949 Guam 1985-2003 -204 2001-2019 217 Sumber: Sinaga, 2010 Hermawan (2012) melakukan penelitian tentang pengaruh pengamatan data dan kualitas data tinggi muka air laut terhadap hasil prediksi amplitudo dan datum pasut. Data yang diolah adalah data pasut dari stasiun pasut Bekapai, Delta Mahakam, Kalimantan Timur periode 1 Januari 2010 hingga 31 Desember 2010. Data tersebut dipecah menjadi sembilan kelompok data yaitu, data utuh satu tahun, data enam bulan, data tiga bulan, tiga kelompok data satu bulan, dan tiga kelompok data 15 hari. Masingmasing kelompok data digunakan untuk memprediksi tinggi muka air laut selama satu tahun di tahun yang sama dengan metode least square, data prediksi dianalisis kembali untuk mendapatkan nilai amplitudo beserta kesalahannya yang selanjutnya digunakan dalam penentuan nilai MLWS, MHWS, HAT, dan LAT. Untuk mengetahui pengaruh data dan kualitas data maka data pengamatan satu tahun diberi kesalahan berupa data kosong dan data spike, lalu dilakukan prediksi dan diolah lagi untuk mendapatkan nilai konstanta pasut, kesalahan amplitudo, dan nilai datumnya. Hasil penelitian tersebut dapat dilihat ditabel I.2. Kesimpulan dari penelitian tersebut adalah nilai variansi dari hasil prediksi pasut bergantung pada jumlah data yang digunakan, semakin panjang data dan kualitasnya baik dalam hal ini kecilnya jumlah data kosong dan data spike maka semakin kecil nilai varian yang dihasilkan. 8 Tabel I.2 Nilai datum dan variansi dengan tiga pengaruh Datum Pengaruh Panjang data Pengaruh Data Kosong Pengaruh Data Spike dan (Periode) (Prosentase) (Prosentase) Variansi 1 1 15 (meter) Tahun Bulan Hari Variansi 0,0085 0,047 MLWS 2,576 MHWS 7% 0,8% 0,03% 6% 3% 0,25% 0,06 0,0086 0,0086 0,0085 0,0086 0,0085 0,0085 2,553 2,570 2,585 2,578 2,575 2,585 2,594 2,553 2,285 2,307 2,291 2,296 2,267 2,267 2,296 2,281 2,275 HAT 3,839 3,725 3,770 3,843 3,839 3,839 3,840 3,840 3,840 LAT 1,349 1,387 1,332 1,357 1,348 1,350 1,348 1,349 1,348 Sumber: Hermawan, 2012 Rachmadi (2011) dalam penelitiannya yang berjudul “Analisis Kualitas Data Pasut untuk Pendifinisian Chart Datum” menganalisis kualitas data pasang surut di enam stasiun pasut milik BIG yaitu stasiun pasut Batam, Cilacap, Lembar, Mahalayati, Tarakan dan Sorong. Data pasut tersebut merupakan data pengamatan selama tahun 2000. Data pasut diolah menggunakan pendekatan grafik untuk pengecekan kesalahan data spike dan offset, analisis metode kuadrat terkecil dan prediksi menggunakan aplikasi T-Tide. Hasil penelitian tersebut adalah data dari tiga stasiun pasut yaitu stasiun pasut Cilacap, Malahayati, dan Sorong tidak lolos proses kontrol kualitas data, ini dikarenakan terdapat data kosong lebih dari 24 jam. Tiga stasiun pasut sisanya yang datanya memenuhi kontrol kualitas data yaitu stasiun pasut Batam, Lembar dan Tarakan, masing-masing dilakukan analisis konstanta pasut dan menghasilkan 70 komponen pasut yang selanjutnya digunakan untuk prediksi. Hasil prediksinya dinyatakan memiliki akurasi persebaran data yang baik, karena nilai RMS nya mendekati nol yaitu, 0,027 meter untuk stasiun pasut Batam, 0,031 untuk stasiun Lembar, dan 0,027 untuk stasiun Tarakan. Penelitian yang dilakukan oleh penulis mengambil lokasi penelitian di perairan Jepara, data yang digunakan adalah data pasut stasiun pasut Jepara milik BIG dengan 9 panjang periode data dari tahun 1994 – 2012. Data tersebut dibagi menjadi empat kelompok data pengamatan dan prediksi yaitu kelompok data 30 hari, satu tahun, 8,85 tahun, dan 18,6 tahun. Kontrol kualitas data meliputi koreksi data kosong, koreksi offset, dan koreksi data spike menggunakan uji statistik dengan tingkat kepercayaan 2σ. Metode hitungan yang dipakai adalah metode least quare untuk mendapatkan nilai HHWL dari masing-masing kelompok data yang selanjutnya digunakan untuk menghitung elevasi dermaga. Hasil hitungan berupa nilai komponen pasut dan elevasi muka air laut acuan dari masing-masing kelompok data dibandingkan dan ditarik kesimpulan tentang pengaruh periode dan kualitas data pasut terhadap nilai elevasi dermaga yang dihasilkan. I.7 Landasan Teori I.7.1 Pasang Surut Laut Pasang surut merupakan pergerakan permukaan air laut secara periodik yang memiliki hubungan fase dan amplitudo terhadap periode gaya geofisik (International Oceanographic Comission, 1985). Tinggi muka air laut pada peristiwa pasang surut merupakan resultan dari berbagai gelombang yang dominan dibangkitkan akibat adanya pengaruh variasi gaya gravitasi benda langit khususnya bulan dan matahari terhadap pergerakan reguler bumi dan bulan serta sistem bumi dan matahari. Faktor-faktor nonastronomi seperti konfigurasi garis pantai, kedalaman lokal air laut, topografi dasar laut, dan pengaruh hidrografi serta metereologi lainnya juga memiliki peran penting dalam mengubah range dari pasut, interval waktu antara air tinggi dan air rendah, dan waktu kedatangan gelombang (NOAA, 2007). Peristiwa pasang surut laut sebenarnya telah dipelajari sejak lama. Pada tahun 1687, Sir Isaac Newton menggunakan teori equilibrium pasang surut untuk menjelaskan respon dari laut di permukaan bumi terhadap pengaruh gaya gravitasi bulan dan matahari (de Jong, et all, 2010). Teori equilibrium menolak bentuk, kedalaman dan konfigurasi dari basin, pergeseran, massa tanah, inersia dari massa air, dan gaya koriolis. Teori equilibrium mengasumsikan bumi dalam kondisi yang ideal dengan asumsi sebagai berikut : 10 1. Bumi berbentuk bola. 2. Permukaan bumi seluruhnya diselimuti oleh air dengan densitas dan kedalaman yang sama. 3. Bumi mengitari matahari dengan kecepatan konstan serta orbit berbentuk lingkaran. 4. Bidang orbit bumi mengelilingi matahari berimpit dengan bidang equator bumi. Teori equilibrium atau teori pasut setimbang ini mampu memberikan gambaran fenomena pasut secara kualitatif namun belum bisa untuk meramalkan pasut secara kuantitatif. Maka untuk menjelaskan fenomena terjadinya pasang surut yang lebih real dikembangkan teori gaya pembangkit pasut laut. Sir Isaac Newton menyatakan bahwa matahari dan bulan membangkitkan medan gaya di sekeliling bumi, dimana arah dan besarnya gaya berubah-ubah secara periodik sesuai dengan posisi kedua benda langit (bulan dan matahari) terhadap bumi. Gaya-gaya inilah yang membangkitkan pasut laut dan disebut gaya pembangkit pasut (GPP) (de Jong, et all, 2010). Gaya pembangkit pasut terdiri dari dua gaya yaitu gaya gravitasi bulan dan gaya sentrifugal sebagai gaya penyeimbang. Hukum Newton tentang gravitasi universal menyatakan bahwa gaya gravitasi antara dua benda berbanding lurus dengan massanya dan berbanding terbalik dengan kuadrat jarak antar dua benda tersebut. Hukum newton tersebut secara matematik dinyatakan melalui rumus I.1 (de Jong, et all, 2010) : …………………………………………………………………... (I.1) Keterangan rumus : Fg : magnitude gaya gravitasi G : konstanta gravitasi universal (6,6725985 . 10-11 m3kg-1s-2) m1 dan m2 : besar massa benda 1 dan benda 2 11 R : jarak antara pusat massa kedua benda Matahari 27 juta kali lebih besar dari bulan, tapi jarak matahari ke bumi 390 kali lebih jauh dari jarak bulan ke bumi (NOAA, 2007). Berdasarkan rumus hukum newton diatas dikombinasikan dengan hukum tentang dua benda langit yang bergerak bersama terhadap pusat massa bersamanya maka dapat diketahui bahwa gaya pembangkit pasut oleh matahari berkurang (59 juta kali) dibandingkan dengan gaya pembangkit pasut oleh bulan, besarnya gaya pembangkit pasut yang dihasilkan oleh matahari adalah 46% dari gaya pembangkit pasut oleh bulan, dengan kata lain magnitude gaya gravitasi bulan lebih besar dibanding matahari sehingga dominan dalam membangkitkan pasut di bumi dengan arah gayanya disetiap titik di permukaan bumi selalu menuju ke bulan. Komponen gaya pembangkit pasut berikutnya adalah gaya sentrifugal, gaya ini merupakan gaya penyeimbang. Gaya sentrifugal lebih besar dari gaya gravitasi dan nilainya sama untuk setiap titik diseluruh permukaan bumi dengan arah gaya menjauhi bulan. Besarnya gaya sentrifugal secara matematik dinyatakan dalam rumus I.2 (de Jong, et all, 2010) : …………………………………………………………………............ (I.2) Keterangan : Fs : magnitude gaya sentrifugal G : konstanta gravitasi universal (6,6725985 . 10-11 m3kg-1s-2) Mm : besar massa bulan r : jarak dari titik dipermukaan bumi ke pusat massa bulan Selanjutnya besarnya nilai gaya pembangkit pasut dihitung menggunakan rumus I.3 dan I.4 : …………………………………………………………….. (I.3) 12 …………………………………………………………….. (I.4) Pada rumus I.4 operasi hitungan menjadi minus dikarenakan komponen gaya pembangkit pasut merupakan dua vektor yang berlawanan arah, untuk lebih jelasnya dapat dilihat pada gambar I.1, dimana titik P merupakan suatu titik di permukaan bumi dengan r merupakan jarak dari titik P ke pusat bulan, RE merupakan jari-jari bumi, dan dM merupakan jarak dari pusat bumi ke pusat bulan. Fs Fg Gambar I.1.Geometri pembangkit pasut di titik P dalam sistem bumi – bulan (Sumber : dimodifikasi dari de Jong, et all, 2010) Gaya pembangkit pasut menghasilkan dua pasang laut di dua sisi bumi yang berbeda. Pasang yang dibangkitkan oleh gaya gravitasi bulan terletak di sisi bumi yang dekat dengan bulan, sedangkan di sisi bumi sebaliknya atau yang jauh dari bulan juga mengalami pasang yang dibangkitkan oleh gaya sentrifugal seperti yang ditunjukkan pada gambar I.2. 13 Gambar I.2.Pasang dan surut dalam sistem bumi – bulan (Sumber : de Jong, et all, 2010) I.7.2 Gerakan Periodik Bulan, Bumi, dan Matahari Posisi benda-benda langit yaitu bulan dan matahari terhadap bumi selalu berubahubah secara periodik. Variasi posisi tersebut merupakan akibat dari gerakan periodik nya. Pada penelitian ini gerakan – gerakan periodik benda langit yang dibahas adalah sebagai berikut : 1. Revolusi bulan mengelilingi bumi. Periode bulan mengelilingi bumi sama dengan periodenya untuk berotasi yaitu 29,5 hari (solar day) (Pugh, 1996). Revolusi bulan pada orbitnya yang berbentuk ellips mengakibatkan variasi posisi bulan terhadap bumi dan matahari yang disebut dengan fase bulan. Fase pertama adalah fase bulan baru dan fase bulan mati. Waktu yang dibutuhkan untuk mengalami fase bulan baru ke bulan baru selanjutnya atau fase bulan mati ke bulan mati selanjutnya adalah 29,5 hari. Fase bulan baru dan bulan mati merupakan posisi dimana bumi, bulan dan matahari terletak pada satu garis seperti yang ditunjukkan pada gambar I.3. Fase bulan baru mengakibatkan laut di permukaan bumi yang terdekat dan terjauh dari bulan mengalami pasang tertinggi (spring tide), sekaligus surut tersurut di permukaan bumi lainnya. 14 Gambar I.3.Fase bulan baru dan fase bulan mati (full moon) (Sumber: de Jong, et all, 2010) Fase berikutnya adalah fase seperempat bulan (quarter). Sebagaimana ditunjukkan pada gambar I.4, pada fase ini posisi bulan – bumi – matahari membentuk sudut 90˚ sehingga menghasilkan pasang perbani (neap tide). Gambar I.4.Fase seperempat bulan (Sumber: de Jong, et all, 2010) Fase terakhir adalah fase dimana posisi bulan terletak diantara posisi bulan baru dan seperempat bulan, fase ini dapat dilihat pada gambar I.5. 15 Gambar I.5.Fase bulan sabit (Sumber: de Jong, et all, 2010) 2. Revolusi bumi mengelilingi matahari. Waktu yang dibutuhkan bumi untuk melakukan satu kali revolusi adalah 365.2564 hari (solar days) atau satu tahun (Vernicek dan Krakiwsky, 1982). Bumi berevolusi pada bidang orbitnya yang berbentuk ellips yang disebut dengan bidang ekliptik. Bidang ini membentuk sudut (inklinasi) terhadap bidang equator sebesar 23,5˚. Bidang orbit bumi yang berbentuk ellips menyebabkan posisi bumi selama berevolusi bisa berada pada titik terdekat dengan matahari (perihelion) dan titik terjauh dari matahari (aphelion) sebagaimana ditunjukkan pada gambar I.6. Saat bumi berada di perihelion range pasut di bumi tinggi, sedangkan ketika bumi berada di aphelion maka range pasut rendah (NOAA, 2003) 16 Gambar I.6.Gerakan tahunan bumi berevolusi (Sumber: Vernicek dan Krakiwsky,1982) 3. Gerakan presesi orbit bulan. Bidang orbit bulan mengalami pertubasi sehingga titik perigee bulan tidak tetap pada posisi yang sama. Gerakan presesi orbit bulan merupakan gerakan perputaran orbit bulan dimana titik perigee bulan kembali ke titik perigee bulan yang semula dengan lama periode 8,85 tahun (Pugh,1996). Ilustrasi gerakan presesi orbit bulan dapat dilihat pada gambar I.7. Bumi Bulan Perigee Gambar I.7.Gerakan presesi orbit bulan 4. Gerakan presesi nodal. Selain mengalami pertubasi, bidang orbit bulan memiliki inklinasi terhadap bidang ekliptik bumi sebesar 5˚11’ (Mueller, 1969 dalam Vernicek dan Krakiwsky, 1982). Perpotongan antara bidang orbit bulan dengan bidang ekliptik bumi diketahui sebagai titik nodal, dan 17 terjadi setiap 18,6 tahun sekali (Vernicek dan Krakiwsky, 1982), untuk lebih jelasnya dapat dilihat pada gambar I.8. Gambar I.8.Gerakan presesi nodal (Sumber: Vernicek dan Krakiwsky,1982) I.7.3 Konstanta Pasut laut Konstanta pasut laut merupakan parameter bernilai yang menyebabkan terjadinya peristiwa pasang surut laut. Konstanta pasut timbul akibat gaya tarik bulan dan matahari, pengaruh geometri, dan bathimetri pantai. Persamaan I.5 menunjukkan hubungan antara konstanta pasut terhadap tinggi muka air laut dalam model persamaan sinusoidal (Rahmasari, 2012): ……………………………………………………….. (I.5) Pada rumus I.5, yB adalah tinggi muka air laut saat t, AB adalah nilai amplitudo konstanta pasut, ω adalah kecepatan sudut konstanta pasut, dan θ adalah beda fase dari konstanta pasut. Konstanta-konstanta pasut masing-masing memiliki simbol, serta nilai amplitudo dan fase yang nilainya berbeda-beda di setiap lokasi. Secara umum, konstanta pasut utama yang timbul akibat gaya gravitasi bulan dan matahari dibagi menjadi tiga yaitu : 1. Konstanta pasut diurnal, yaitu 1 kali pasang dan 1 kali surut dalam sehari. 2. Konstanta pasut semidiurnal, yaitu 2 kali pasang dan 2 kali surut dalam sehari. 18 3. Konstanta pasut periode panjang. Selain tiga konstanta pasut utama tersebut, terdapat konstanta pasut perairan dangkal yang timbul akibat pengaruh geometri dan bathimetri pantai yang berinteraksi konstanta-konstanta pasut utama. Tabel I.3 menunjukkan daftar konstanta-konstanta pasut dengan nilai kecepatan sudut dan periodenya yang selalu tetap. Tabel I.3 Konstanta-konstanta pasut Konstanta pasut Semidiurnal Principal Lunar (M2) Principal Solar (S2) Larger Lunar Elliptic (N2) Luni Solar (K2) Diurnal Luni Solar (K1) Principal Lunar (O1) Principal Solar (P1) Periode panjang Diurnal Fortnightly (Mf) Lunar Monthly (Mm) Solar Semi Annual (Ssa) Perairan dangkal Shallow water semidiurnal (2SM2) MNS2 Shallow water terdiurnal (MK3) Shallow water overtides of principal lunar (M4) Shallow water quarter diurnal (MS4) Kecepatan sudut (derajat/jam) Periode (jam) 28,9841 30,0000 28,4397 30,0821 12,42 12,00 12,66 11,97 15,0411 13,9430 14,9589 23,33 25,82 24,07 1,0980 0,5444 0,0821 327,82 661,30 2191,43 31,0161 27,4240 44,0250 11,61 13,13 8,18 57,9680 6,21 58,0840 6,20 Sumber: Ali, dkk 2004 dalam Rufaida, 2008 I.7.4 Periode Sinodik Periode sinodik adalah panjang pengamatan yang diperlukan untuk memisahkan dua buah konstanta pasut. Sebagai data diskret, maka data pasut akan membatasi konstanta pasut yang dapat dianalisis, dimana pembatasannya bergantung pada nilai frekuensi tertinggi, nilai frekuensi terendah, dan panjang data pengamatan. Panjang data 19 pengamatanlah yang memegang peranan penting dalam menentukan frekuensi terendah dan resolusi untuk memisahkan konstanta-konstanta pasut satu sama lain. Periode sinodik dapat ditentukan menggunakan persamaan I.6 : ……………………………………………………………………………………………………………………. (I.6) Dimana: T : periode sinodik (jam) ω1 dan ω2 : kecepatan sudut dari konstanta 1 dan konstanta 2 (derajat/jam) Sebagai contoh konstanta M2 dan S2 memiliki beda frekuensi 0,0177308 rad/jam, maka periode sinodiknya adalah 354,4 jam atau setara dengan 15 hari, dengan kata lain dibutuhkan data dengan panjang data minimal 15 hari untuk memisahkan konstanta M2 dan S2. Selain konstanta pasut utama, biasanya nilai periode sinodiknya akan lebih lama bahkan bisa hingga fraksi tahunan. Semakin kecil perbedaan frekuensi dua buah konstanta, maka semakin panjang data yang diperlukan untuk memisahkan dua komponen tersebut (Ali, dkk, 2004 dalam Banna, 2014). I.7.5 Analisis Harmonik Pasut Metode Least square Analisis harmonik pasut digunakan untuk menentukan amplitudo dan beda fase konstanta-konstanta pasut terhadap keadaan pasut setimbang. Pada penelitian ini, metode yang digunakan untuk analisis harmonik pasut adalah metode least square. Metode least square adalah metode pendekatan yang dapat digunakan untuk regresi atau pembentukan persamaan dari titik-titik data diskritnya, dan untuk analisis kesalahan pengukuran. Konsep metode ini didasarkan pada pemaksaan suatu kondisi matematis, yaitu jumlah kuadrat kesalahan dikalikan bobotnya adalah minimum, seperti yang ditunjukkan pada persamaan I.7 : Σv2 = min …………………………………………………………………………... (I.7) Dengan v adalah residu pengamatan. 20 Analisis harmonik pasut metode least square menggunakan persamaan dasar fungsi tinggi muka air laut terhadap waktu, sebagaimana yang didefinisikan pada persamaan I.8 (Soeprapto, 1993 dalam Banna, 2014): …………………………………….. (I.8) Keterangan : x(t) : tinggi muka air saat t v(tn) : residu xo : tinggi muka air rerata t : waktu k : jumlah konstanta Ai : amplitudo konstanta ke-i ωi : kecepatan sudut konstanta ke-i gi : beda fase konstanta ke-i Persamaan I.8 kemudian diuraikan dengan sifat trigonometri sehingga menjadi persamaan I.9: …………... (I.9) Jika dimisalkan: , dan …………………………………………….. (I.10) Lalu disubstitusikan ke dalam persamaan I.9, hasilnya menjadi persamaan I.11 yang linear: ………………………. (I.11) 21 Keterangan : Ar dan Br : konstanta pasut ke-i tn : waktu pengamatan (tn = -n, n+1, n; tn = 0 adalah waktu tengah-tengah pengamatan) Tinggi muka air laut hasil hitungan (x(t)) dengan persamaan I.8 akan mendekati tinggi muka air pengamatan (x(tn)) jika : …………………………………………. (I.12) Persamaan I.12 kemudian diturunkan terhadap Ari, Bri dan xo, sehingga: , , dengan i = 1, 2, …., k ……………………………….. (I.13) Berdasarkan hubungan persamaan di atas maka dapat ditentukan nilai xo, Ar dan Br melalui tahapan dengan prinsip metode least square berikut : 1. Menentukan persamaan observasi yaitu persamaan tinggi muka air laut, L = AX 2. Menetukan persamaan koreksi, V = (AX) – L 3. Menghitung nilai parameter, X = (ATPA)-1 ATPL Sehingga persamaan observasinya dapat ditulis : ………….. (I.14) Berikut merupakan desain matrik dalam analisis harmonik pasut metode least square (Rachmadi, 2011): 1. Matrik A merupakan matrik koefisen yang mana merupakan hasil limearisasi persamaan observasi. 22 1 cos1t1 sin 2 t1 cos k t1 sin 1t1 sin k t1 1 cos t sin t cos t sin t sin t 1 1 2 1 k 1 1 1 k 1 n Ak 1 cos1t n sin 2 t n cos k t n sin 1t n sin k t 2. Matrik L merupakan matrik data pengamatan tinggi muka air laut. 3. Matrik X merupakan matrik parameter konstanta harmonik pasut Nilai amplitudo konstanta pasut ditentukan dari persamaan I.10 sebelumnya: , …………………………………………………………………. (I.15) Kemudian nilai beda fase juga ditentukan dari persamaan I.10 : , 23 ……………………………………………………………………….. (I.16) I.7.6 Prediksi Pasut Metode Least square Prediksi pasut bertujuan untuk meramalkan tinggi muka air laut di suatu lokasi pada rentang waktu tertentu di masa mendatang. Dalam prediksi pasut diperlukan data amplitudo dan beda fase dari konstanta-konstanta pembangkit pasut. Pada penelitian ini prediksi pasut dilakukan menggunakan metode least square dengan persamaan I.17: ……………………………………… (I.17) Keterangan : x(t) : tinggi muka air laut hasil prediksi xo : tinggi muka air laut rata-rata N : jumlah konstanta pasut A : amplitudo konstanta pasut f : faktor nodal (koreksi amplitudo) ω : kecepatan sudut konstanta pasut t : waktu v : argument astronomi g : beda fase Dari persamaan I.17 dapat diketahui bahwa tinggi muka air laut hasil prediksi sangat bergantung pada jumlah konstanta pasut yang digunakan dalam formula hitungan, yang mana jumlah konstanta pasut bergantung pada panjang data pengamatannya. Semakin panjang data pengamatan, maka semakin banyak konstanta pasut yang dapat 24 dihasilkan, semakin banyak pula konstanta pasut yang akan dilibatkan dalam formula prediksi. I.7.7 Data Pasut Laut Stasiun Pasut BIG Jepara Data pasut merupakan data diskret, yaitu data deret waktu yang diamati dengan interval tertentu (Perbani, 2010). Data tersebut didapat dari hasil pengamatan menggunakan alat perekam pasut. Alat ini bisa berupa alat manual yaitu tide gauge, maupun alat digital atau otomatis yang memanfaatkan sensor tertentu. BIG atau Badan Informasi Geospasial memiliki 113 stasiun pasang surut yang tersebar di seluruh Indonesia. Salah satu stasiun pasut milik BIG yang terdapat di pulau Jawa adalah stasiun pasut Jepara. Stasiun pasut Jepara menggunakan alat perekam pasut digital berupa floating gauge digital dengan merek OTT Thalimedes. Cara kerja floating gauge pada dasarnya menggunakan sebuah tabung (tube) untuk memfilter air laut yang masuk ke dalam tabung, kemudian di dalam tabung tersebut terdapat sebuah pelampung sensitif yang dihubungkan dengan kawat baja yang melingkar pada sebuah katrol yang akan mengkonversi gerakan naik turunnya pelampung akibat pasut menjadi gerakan horizontal yang akan menggerakkan pen untuk mencatat tinggi muka air laut dalam skala tertentu pada gulungan paper chart. Pada floating gauge digital, paper chart digantikan dengan encoder digital yang merekam tinggi muka air laut dalam bentuk angka digital. Hasil alat perekam data pasut di stasiun pasut Jepara adalah data tinggi muka air per menit dengan satuan centimeter. Selanjutnya data tersebut dilakukan validasi berupa pembuangan data spike serta koreksi offset menggunakan software MGPS-DB (Khasanah, 2014). Data yang sudah divalidasi akan memiliki interval waktu per jam dan berbentuk matriks berdimensi 24 x 30, 24 merupakan jumlah jam dan 30 merupakan jumlah hari yang bergantung pada bulan seperti yang ditunjukkan pada gambar I.9. Data disimpan dengan format data umum atau “.DAT” serta format penamaan berupa “kode stasiun pasut_bulan_tahun”, sebagai contoh nama data: “S0180101”. 25 Keterangan: S018 : stasiun pasut Jepara 01 : bulan Januari 01 : tahun 2001 Gambar I.9.Data pasut stasiun pasut Jepara pada Januari 2001 I.7.8 Kontrol Kualitas Data Pasut Setiap data hasil pengukuran pasti megandung kesalahan, termasuk data hasil pengukuran pasut. Kontrol kualitas data pasut bertujuan untuk memverifikasi data sehingga dapat terdeteksi kesalahan yang berupa offset, outliers atau spikes, serta perubahan time series dari data pasut (SHOM, 2012 dalam Banna, 2014). Kesalahan offset merupakan perbedaan tunggang pasut dalam satu paket data yang diakibatkan oleh perbedaan nilai referensi tinggi. Kesalahan outliers atau spikes adalah kesalahan yang berupa data melonjak sehingga keluar dari range data pasutnya. Perubahan time series dari data pasut diakibatkan oleh adanya beberapa data kosong yang terletak di tengahtengah rentang data pengamatan. 26 Kontrol kualitas data dilakukan sebelum analisis harmonik metode least square. Terdapat dua kontrol kualitas data pasut yang dilakukan pada penelitian ini: 1. Kontrol kualitas data secara visual. Kontrol kualitas ini dilakukan dengan mengintepretasi secara visual ada tidaknya kesalahan spike, kesalahan offset, dan data kosong serta letak dari kesalahan tersebut pada kurva data pengamatan. Khusus untuk kesalahan data kosong dideteksi dengan melihat perubahan time series pada data secara langsung. 2. Uji statistik. Uji statistik dapat mendeteksi kesalahan pada data berdasarkan nilai simpangan bakunya. Nilai simpangan baku yang besar terhadap nilai rata-rata data pengamatan, biasanya mengindikasikan terdapat kesalahan pada data. Pada penelitian ini uji statistik dilakukan dua kali, yaitu saat sebelum perataan dan setelah perataan. Kedua uji statistik tersebut berturutturut meliputi : a. Uji global dengan simpangan baku 2σ. Simpangan baku atau standar deviasi dihitung untuk melihat seberapa presisi atau kedekatan data pengamatan dengan rata-rata data. Selain mendeteksi letak kesalahan, uji ini juga dapat langsung menghilangkan kesalahan yang berupa kesalahan spike dengan cara menolak data yang berada diluar batas berdasarkan tingkat kepercayaan tertentu yang diterapkan pada simpangan bakunya menggunakan kaidah distribusi normal. Simpangan baku secara matematis dihitung menggunakan rumus I.18 (Sugiyono, 2007 dalam Banna 2014): ………………………………………………. (I.18) Keterangan: σ : simpangan baku atau standar deviasi Xi : data pengamatan 27 : rata-rata dari data pengamatan n b. : jumlah data pengamatan Uji Signifikansi parameter dua metode dengan uji t (student). Uji t (student) dapat digunakan untuk menguji dua buah nilai parameter dari perataan dua metode untuk obyek yang sama. Prosesnya diawali dengan penyusunan dua hipotesis, yaitu hipotesis awal (Ho) dan hipotesis pembanding (Ha). Hipotesis awal akan diterima apabila dipenuhi besaran kriteria pada persamaan (I.19) (Wolf, P. R. dan Ghilani, C. D., 1997) : …………………………………… (I.19) Keterangan: xIi : parameter ke-i metode I xIIi : parameter ke-i metode II σxIi : simpangan baku parameter ke-i metode I σxIIi : simpangan baku parameter ke-i metode II t α,f : sebaran fungsi t dari tabel t (student) dengan taraf uji (α) dan f derajat kebebasan. c. RMS (root mean square) Pada penelitian ini nilai RMS digunakan untuk melihat kecocokan model prediksi yang baik dengan data pengamatan yang asli. Semakin kecil nilai RMS maka model prediksi dinyatakan baik dan dapat mendekati data pengamatan yang asli. Dalam hal ini nilai RMS dihitung menggunkan rumus I.20 (Rahmasari, 2012): ……………………………………… (I.20) 28 Keterangan: RMS : nilai RMS (meter) μ : nilai rata-rata dari selisih antara data pengamatan dengan data pasut hasil prediksi yi : selisih antara data pengamatan dengan data pasut hasil prediksi n : jumlah data pasut I.7.9 Aplikasi T-Tide Aplikasi T-Tide merupakan aplikasi yang berisi program untuk mengolah data pasut yang pertama kali dibuat oleh Mike G.G. Foreman dalam bahasa Fortran, kemudian S. Lentz dan B. Beardsley mengkonversi kode tersebut ke dalam bahasa Matlab, dan R. Pawlowicz kemudian melengkapinya dengan menambahkan perhitungan yang kompleks. Fenomena pasut dalam aplikasi T-Tide dihitung dengan menggunakan persamaan yang mengasumsikan pasut yang terjadi sebagai pasut setimbang, dan proses analisis harmoniknya menggunakan metode least square. Paket program T-Tide terdiri beberapa program berikut program yang digunakan (Anggun, 2012 dalam Akbar, 2013) : 1. Program analisis harmonik dan pendukungnya a. t_tide.m, untuk menghitung analisis pasut dari rangkaian waktu yang nyata dan kompleks. b. t_predic.m, untuk menghitung prediksi pasut menggunakan hasil dari program t_tide c. t_vuf.m, untuk menghitung koreksi nodal dan argumentasi astronomi. d. t_getconsts.m, mengekstrak berbagai macam data konstanta harmonik (konstituen) berdasar file data dari paket program fortran. e. t_synth.m, untuk menentukan konstanta harmonic (konstituen) yang digunakan dalam prediksi pasut. 2. File dokumentasi 29 a. t_readme.m, merupakan file yang berisi penjelasan mengenai paket program t_tide b. t_error.m, penjelasan mengenai interval kepercayaan dan bagaimana hal tersebut dapat dikembangkan 3. File demonstrasi a. t_demo.m, contoh demo penggunaan program t_tide dengan mengunakan data ketinggian di stasiun pasut Tuktoyuktuk. 4. Data file pendukung T_equilib.dat file yang berfungsi untuk menghitung amplitudo setimbang dari konstanta harmonik utama sesuai lintang yang dimasukkan. 5. Data program lainnya : a. Tide3.dat, berisi file data konstanta harmonik standar dari paket analisis Institute of Ocean Sciences (IOS), file ini dibaca sekali dan hasilnya tersimpan dalam struktur data dalam t_constituents.mat. b. t_equilib.dat file yang berisi faktor amplitudo A dan B. c. t_constituents.mat, berisi struktur data konstanta harmonik. d. t_example.mat, contoh data set ketinggian muka laut di stasiun pasut Tuktoyuktuk. I.7.10 Elevasi Muka Air Laut Penting Data pasut menghasilkan nilai elevasi muka air laut yang penting untuk diketahui, beberapa diantaranya dijadikan sebagai referensi tinggi dalam pengukuran atau datum pasut, berikut penjelasan singkat mengenai jenis elevasi muka air laut penting yang digunakan dalam penelitian ini (Triatmodjob, 2003): 1. MSL (mean sea level) atau muka air rerata adalah muka air rerata antara muka air tinggi rerata dengan muka air rendah rerata. Elevasi ini digunakan sebagai referensi mutlak untuk elevasi di daratan. 2. HHWL (highest high water level) atau muka air tinggi tertinggi adalah air tertinggi pada saat pasang surut purnama atau bulan mati. Nilai HHWL 30 dihitung menggunakan persamaan I.21 (Ongkosono dan Suyarso, 1989 dalam Nugraha, dkk, 2013): (I.21) Dengan: So : tinggi muka air laut rerata A(M2), A(S2), … : nilai amplitudo konstanta M2, nilai amplitudo konstanta S2, … I.7.11 Dermaga Dermaga menurut Bambang Triatmodjob (2003) didefinisikan sebagai “Suatu bangunan pelabuhan yang digunakan untuk merapat dan menambatkan kapal yang melakukan bongkar muat barang dan menaik-turunkan penumpang”. I.7.11.1 Design Water Level (DWL) Design Water Level (DWL) atau elevasi muka air laut rencana sebenarnya merupakan hasil penjumlahan beberapa parameter yaitu pasang surut, tsunami, wave setup, wind setup, dan kenaikan muka air laut global. Dalam pembuatan DWL, semua parameter diatas dilibatkan dan dianggap terjadi dalam waktu yang bersamaan, namun kemungkinan kejadian tersebut adalah sangat kecil. Sementara itu pasang surut mempunyai periode 12 jam atau 24 jam, yang berarti dalam sehari bisa terjadi satu kali atau dua kali pasang surut. Kemungkinan terjadinya kejadian air pasang surut ini sangat besar, dengan demikian pasang surut merupakan faktor terpenting dalam menentukan DWL. DWL ditentukan berdasar pemilihan salah satu elevasi muka air laut dari data pasang surut sebagai acuan dalam perencanaan. Dari beberapa definisi elevasi muka air laut sebelumnya. HHWL biasa digunakan untuk menentukan elevasi puncak pemecah gelombang, dermaga, panjang rantai pelampung penampbat dan sebagainya. Pemilihan 31 penggunaan HHWL sebagai referensi dalam hitungan bergantung pada ketersediaan data pasang surut dalam pekerjaan. Dalam penelitian ini digunakan persamaan I.22 untuk menentukan nilai DWL dengan tidak memperhitungkan storm surge atau wind-setup karena keterbatasan data gelombang (Nugraha, dkk, 2013) : …………………………………………………………… (I.22) Keterangan: DWL : nilai elevasi muka air laut rencana (meter) HHWL : elevasi muka air laut acuan (meter) SLR (sea level rise) : kenaikan muka air laut akibat pemanasan global (mm/tahun) I.7.11.2 Elevasi Puncak Dermaga Bangunan dermaga harus mampu mengamankan gelombang air laut untuk kelancaran maneuver kapal dan operasi pelabuhan. Elevasi puncak dermaga dihitung berdasar DWL yang ditentukan dengan nilai HHWL untuk mengantisipasi air pasang tinggi (Rachmayanti dan Yuwono, 2011). Elevasi dermaga bereferensi terhadap nilai MSL setempat, sebagaimana ditunjukkan gambar I.10. Nilai elevasi dermaga HHWL MSL LLWL Chart Datum Gambar I.10.Sketsa nilai elevasi dermaga Nilai elevasi dermaga dihitung menggunakan rumus I.23 : ………………………………………. (I.23) 32 keterangan: DWL : nilai elevasi muka air laut rencana (meter) Clearence : tinggi jagaan menurut Standar Kriteria Desain Pelabuhan Indonesia (1984) (meter) I.8 Hipotesis Elevasi dermaga yang dihitung berdasarkan HHWL akan menghasilkan nilai yang berbeda untuk setiap kelompok periode data, karena nilai amplitudo untuk konstanta pasut yang sama pada kelompok periode data pasut yang berbeda akan berbeda pula, hal ini disebabkan nilai amplitudo relatif terhadap panjang periode pengamatan yang berpengaruh pada jumlah konstanta yang dapat dipisahkan (Perbani, 2010). Kelompok data pasut periode pendek yaitu 15 hari, 30 hari, dan satu tahun merupakan kelompok data pasut yang tidak stabil, karena belum mencakup semua fenomena astronomis pembangkit pasut. Sedangkan kelompok data pasut periode panjang yaitu 8,85 tahun relatif lebih stabil, karena telah mencakup gerakan revolusi bulan, revolusi bumi, presesi orbital dan separuh gerakan presesi nodal. Berdasarkan asumsi tersebut, maka hipotesis penelitian ini adalah sebagai berikut : 1. Kelompok data pasut periode terpanjang yaitu 18,6 tahun menghasilkan jumlah konstanta signifikan terbanyak, serta nilai MSL yang paling stabil. 2. Nilai HHWL dari data pasut periode pendek (15 hari, 30 hari, dan 1 tahun) dan data hasil prediksinya tidak mampu mewakili nilai HHWL pada periode panjang, sehingga nilai elevasi dermaga yang dihasilkan oleh data pasut periode pendek tidak aman hingga jangka waktu panjang. 3. Periode optimal untuk memprediksi data pasut 18,6 tahun adalah periode 8,85 tahun.