jurnal buat di burning
advertisement

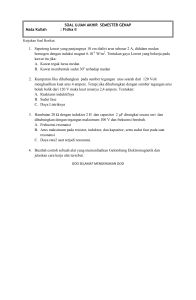
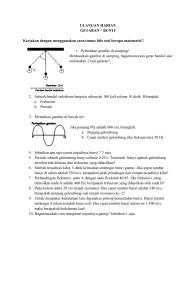
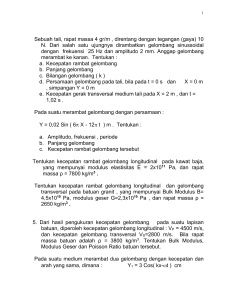
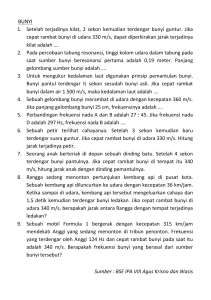
RANCANG BANGUN ALAT PENGUKUR KECEPATAN RAMBAT GELOMBANG PADA KAWAT BERBASIS MIKROKONTROLER Arie Fajrianto Nugroho, Dr Prawito, Drs. Arief Sudarmaji, M.T DepartemenFisika, FMIPAUI, KampusUI Depok 16424 [email protected] Abstrak Telah dibuat sebuah alat pengukur kecepatan rambat gelombang pada kawat. Alat ini berbasis pada percobaan Melde. Gaya tegang tali diberikan oleh tarikan motor dc, sedangkan besar gaya tarikannya dibaca oleh sensor strain gauge. Untuk membangkitkan gelombang pada kawat, kawat akan dialiri sinyal listrik sinusoidal yang frekuensinya dapat diatur, dan kawat diletakkan diantara dua buah kutub magnet permanen. Batang magnet permanen dipasang ditengah – tengah panjang kawat. Untuk mengetahui besarnya simpangan getaran yang timbul, digunakan detektor koil elektromagnetik yang akan menghasilkan tegangan listrik sebanding dengan besarnya simpangan getaran pada kawat. Tegangan listrik yang dihasilkan akan dibaca oleh mikrokontroler melalui ADC. Semua proses pengaturan dan pengambilan data dilakukan oleh mikrokontroler, dan hasilnya ditampilkan ke komputer yang terhubung melalui komunikasi serial. Kata kunci : Motor DC, Sensor Strain Gauge, Percobaan Melde, detektor koil elektromagnetik,magnet permanen, Gelombang berdiri. Design of Microcontroller-based System for Measuring Wave Speed on String Abstract Instrumentation system for measuring wave speed on awire has been built. This system is designed based on Melde’s experiment. Tension force on the wire is given by a DC motor, while the magnitude of the force is measured using straingauge-based sensor. Frequency controllable sinusoidal signal is flown through the wire where is located between two pole permanent magnet in order to generate the sinusoidal wave on the wire. The permanent magnet bar is set up in the middle of the length of the wire. Electromagnetic coil detector will generate electrical voltage that is proportional to the dsiplacement of wave vibration, and the voltage will be measured by microcontroller using its ADC unit. All of the control and data aquisition is executed by microcontroller, and then the result is displayed on a computer which is connected using serial communication. Keywords: DC motors, Strain-Gauge-based Sensor, Melde’s Experiment, Electromagnetic coil detector, Permanent magnet, Stasionary wave. PENDAHULUAN Eksperimen Melde mempelajari tentang besaranbesaran yang mempengaruhi cepat rambat gelombang pada tali. Melde menemukan bahwa cepat rambat gelombang pada dawai sebanding dengan akar gaya tegangan tali dan berbanding terbalik dengan akar massa persatuan panjang dawai. = Dengan : µ= Dimana : = cepat rambat gelombang (m/s) F = gaya tegangan tali (Newton) = rapat massa linier tali (massa tali/panjang tali) (kg/m) Percobaan Melde digunakan untuk menyelidiki cepat rambat gelombang dalam dawai. Seperti terlihat pada gambar, Gambar 1. Percobaan Melde Pada salah satu ujung tangkai garpu tala diikatkan erat-erat sehelai kawat halus lagi kuat. kawat halus tersebut ditumpu pada sebuah katrol dan ujung kawat diberi beban, misalnya sebesar g gram. Garpu tala digetarkan dengan elektromagnet secara terus menerus, hingga amplitudo yang ditimbulkan oleh garpu tala konstan. METODE PENELITIAN Pada pembuatan alat pengukur kecepatan gelombang pada kawat, dibutuhkan beberapa pemahaman dasar, perancangan sistem, pembuatan perangkat lunak dan juga mekanik yang akan digunakan penulis dalam penyusunan alat “Rancang Bangun Alat Pengukur Kecepatan Rambat Gelombang pada Kawat”. Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 - - Gelombang Gelombang adalah getaran yang merambat. Bentuk ideal dari suatu gelombang akan mengikuti gerak sinusoide. Selain radiasi elektromagnetik, dan mungkin radiasi gravitasi, yang bisa berjalan lewat vakum, gelombang juga terdapat pada medium karena perubahan bentuk dapat menghasilkan gaya memulihkan yang lentur di mana mereka dapat berjalan dan dapat memindahkan energi dari satu tempat kepada lain tanpa mengakibatkan partikel medium berpindah secara permanen yaitu tidak ada perpindahan secara masal. Apalagi, setiap titik khusus berosilasi di sekitar satu posisi tertentu.Suatu medium disebut: 1. 2. 3. 4. linear jika gelombang yang berbeda di semua titik tertentu di medium bisa dijumlahkan, terbatas jika terbatas, selain itu disebut tak terbatas seragam jika ciri fisiknya tidak berubah pada titik yang berbeda isotropic jika ciri fisiknya "sama" pada arah yang berbeda Pada hakekatnya gelombang merupakan rambatan energi (energi getaran). Ada beberapa macam-macam gelombang. Menurut arah getarnya: 1. Gelombang transversal adalah gelombang yang arah getarnya tegak lurus terhadap arah rambatannya. Contoh: gelombang pada tali, gelombang permukaan air, gelombang cahaya, dll. Gelombang Berjalan Gelombang berjalan, yaitu gelombang dengan amplitudo yang berubah di setiap titiknya. Gelombang cahaya, gelombang tali dll. • Persamaan gelombang berjalan Gambar 4. Gelombang Berjalan Seutas tali OB . Titik O digetarkan terus menerus, sehingga gelombang λ merambat menuju B dengan Amplitudo A , frekuensi f , panjang gelombang dan cepat rambat v. Titik P berjarak x dari asal getaran O, maka waktu yang digunakan untuk merambat dari titik O ke titik P adalah jarak dibagi kecepatan atau (top = ). Bila O telah bergetar t sekon maka titik p akan bergetar selama Tp = t – top = ( t - )...............................................(2.1) Persamaan gelombangnya menjadi : y = A sin ωtp = A sin ω(t - )...................................(2.2) Dalam bentuk yang lain persamaan gelombang tersebut menjadi: Y = ± A sin (ωt ± kx).............................................(2.3) ω = 2πf = › Frekuensi sudut (rad/s) 2. Gambar 2. Gelombang Transversal Gelombang longitudinal adalah gelombang yang arah getarnya sejajar atau berimpit dengan arah rambatannya. Contoh: gelombang bunyi dan gelombang pada pegas. Gambar 3. Gelombang Longitudinal Menurut amplitudo dan fasenya : 1. Gelombang berjalan adalah gelombang yang amplitudo dan fasenya sama di setiap titik yang dilalui gelombang. 2. Gelombang diam (stasioner) adalah gelombang yang amplitudo dan fasenya berubah (tidak sama) di setiap titik yang dilalui gelombang. k= › bilangan gelombang Tanda pada amplitudo A menunjukkan: -: gelombang merambat ke kiri +: gelombang merambat ke kanan Tanda pada konstanta x menunjukkan: + : titik asal getaran ke atas - : titik asal getaran ke bawah • Kecepatan dan percepatan simpangan Kecepatan v adalah turunan dari simpangan = atau = cos ( − )......................(2.4) dengan nilai kecepatan maksimum adalah vmax = Aω................................................................(2.5) Percepatan a adalah = atau v = − ω sin( − ) = −ω y...(2.6) dengan nilai percepatan maksimum amax = Aω2 .............................................................(2.7) • Sudut Fase, Fase dan beda fase Persamaan dapat diubah menjadi : y = A sin (ωt – kx)......................................(2.8) y = A sin 2π ( – )..........................................(2.9) y = A sin 2πφ................................................(2.10) Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 Sudut fase adalah nilai sudut dari sin : Θ = 2πφ........................................................(2.11) ........................................................(2.11) Perpaduan antara gelombang datang dan gelombang pantul adalah: yp = Ap cos (ωt – kl)............................................(2.21) Fase Φ = ( – )....................................................(2.12) Beda fase ∆φ = φ2 – φ1 = ( - ∆ - ∆ )..........................................(2.13) Gelombang Diam (Stasioner) Ap adalah amplitudo maksimum dengan persamaan variabel sinus, sehingga ada nilai maksimum dan nilai minimum nol. Dengan demikian dapat ditentukan titik simpul dan titik perut, sbb: Titik Simpul dan Titik Perut Dari persamaan didapat yp = 2 Asin (kx) cos (ωt – kl).............................(2.22) yp = Ap cos (ωt – kl)............................................(2.23) Titik Perut Titik perut adalah titik yang amplitudonya selalu maksimum Ap = 2 Asin (kx) = 2A ........................................(2.24) Sin (kx) = 1.........................................................(2.25) # $ % ) ( &'#) (kx) = , , , = ..........................(2.26) x= ( &'#) ..................................................(2.27) Titik perut & x = λ = (2n – 1) , n = 1,2,3,.............................(2.28) ( Gambar 5. Gelombang Diam (Stasioner) Gelombang stasioner adalah gelombang hasil perpaduan atau interferensi dua gelombang yang berlawanan arah, yaitu gelombang datang dan gelombang pantul yang memiliki amplitudo dan frekuensi sama. Pada gelombang stasioner ada titik-titik yang selalu bersimpangan maksimum (titik perut) dan ada titik-titik yang simpangannya selalu nol (titik simpul). Yang di bahas disini adalah gelombang pada tali . ( Titik Simpul Titik simpul adalah titik yang amplitudonya selalu nol. Ap = 2 Asin (kx) = 0 ..........................................(2.29) sin (kx) = 0 ...................................................(2.30) (kx) = 0π, π π, π 2π, π, ..... = nnπ ...................................(2.31) x = nπ π ....................................................(2.32) 1. Persamaan gelombang stasioner ujung terikat Seutas tali panjangnya l dari OB , titik O digetarkan terus menerus dan titik B diikat. Titik P berada X dari ujung terikat. Hasil perpaduan gelombang datang dan gelombang pantul adalah gelombang stasioner dan membentuk simpul dan perut. Titik Simpul x= & ( λ = (2n) , n = 0, 1, 2, 3, ....... ...................(2.33) Gambar 6. Gelombang stasioner ujung terikat Akan kita tinjau perpaduan gelombang datang dan gelombang pantul di titik P Gelombang merah adalah gelombang datang merambat ke kanan. y1 = Asin (ωt – k(l - x))...........................................(2.14) Gelombang hijau adalah gelombang pantul merambat dari O - P - B - P dan berubah fase 180 derajat maka sudut ditambah phi : y2 = Asin ((ωt – k(l +x)) + π)...........................................(2.15) y2 = Asin (- (ωt – k(l+x))))..............................................(2.16) yp = y1 + y2 ..........................................................(2.17) yp = Asin ((ωt – k(l + x)) + Asin ( - (ωt – k(l + x))................(2.18) yp = Asin (ωt – kl + kx) + Asin ( - ωt ω + kl + kx)....................(2.19) yp = 2 Asin (kx) cos (ωt – kl)...........................................(2.20) Gambar 7. Titik simpul dan titik perut gelombang stasioner ujung terikat 2. Persamaan Gelombang Stasioner ujung bebas Seutas tali panjangnya l dari OB , titik O digetarkan terus menerus dan titik B diikat. Titik P berada X dari ujung terikat. Hasil perpaduan gelombang datang dan gelombang pantul adalah gelombang stasioner dan membentuk simpul dan perut. Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 Gambar 8. Gelombang stasioner ujung bebas Akan kita tinjau perpaduan gelombang datang dan gelombang pantul di titik P Gelombang merah adalah gelombang datang merambat ke kanan. y1 = Asin (ωt – k (l – x)) .......................................(2.34) Gelombang hijau adalah gelombang pantul merambat dari O - P - B - P dan berubah fase 180 derajat maka sudut ditambah. y2 = Asin ((ωt – k(l + x)).........................................(2.35) Super posisinya menjadi yp = 2 Acos (kx) sin (ωt – kl)......................................(2.36) yp = Ap sin (ωt – kl)...............................................(2.37) Gelombang stasioner biasa juga disebut gelombang tegak, gelombang berdiri atau gelombang diam adalah gelombang yang terbentuk dari perpaduan atau interferensi dua buah gelombang yang mempunyai amplitudo dan frekuensi yang sama, tapi arah rambatnya berlawanan. Amplitudo pada gelombang stasioner tidak konstan, besarnya amplitudo pada setiap titik sepanjang gelombang tidak sama. Pada simpul amplitudonya nol, dan pada perut amplitudonya maksimum. Periode gelombang (T) adalah waktu yang diperlukan oleh gelombang untuk menempuh satu panjang gelombang penuh. Panjang gelombang (λ (λ) adalah jarak yang ditempuh dalam waktu satu periode. Frekuensi gelombang adalah banyaknya gelombang yang terjadi tiap satuan waktu. - Gelombang Stasioner Ap adalah amplitudo dengan persamaan variabel cosinus sehingga ada nilai maksimum dan nilai minimum nol. Dengan demikian dapat ditentukan titik simpul dan titik perut, sbb: Gambar 10. Gelombang berjalan Titik Perut dan Titik Simpul Titik Perut adalah titik yang amplitudonya selalu maksimum: Ap = 2 Asin (kx) = 2A ...............................................(2.24) Sin (kx) = 1............................................................(2.25) # $ % ) ( &'#) (kx) = , , , = ....................................(2.26) ( &'#) x= ..................................................(2.27) Titik perut & x = λ = (2n – 1) , n = 1,2,3,...... .................................(2.28) ( ( Bila seutas tali dengan tegangan tertentu digetarkan secara terus menerus maka akan terlihat suatu bentuk gelombang yang arah getarnya tegak lurus dengan arah rambat gelombang. Gelombang ini dinamakan gelombang transversal. Cepat rambat gelombang (v) adalah jarak yang ditempuh gelombang tiap satuan waktu. Secara umum, cepat rambat gelombang dapat dirumuskan sebagai berikut : Titik Simpul Titik simpul adalah titik yang amplitudonya selalu nol. Ap = 2 Asin (kx) = 0 ............................................(2.29) sin (kx) = 0 ...................................................(2.30) =λxf Dimana : v = cepat rambat gelombang (m/s) λ = panjang gelombang (m) (kx) = 0π, π, 2π, ..... = nπ π .........................................(2.31) f = frekuensi (Hz) x = nπ π ....................................................(2.32) Titik Simpul x= & ( λ = (2n) , n = 0, 1, 2, 3, ....... ..............................(2.33) Silahkan lihat Gambar dimana titik perut dan titik simpulnya: Jika kedua ujungnya tertutup, gelombang pada tali itu akan terpantul-pantul dan dapat menghasilkan gelombang stasioner yang tampak berupa simpul dan perut gelombang. Dari gambar di atas diketahui bahwa amplitudo adalah jarak antara perut gelombang dengan arah cepat rambatnya. Sedangkan panjang gelombang adalah jarak satu perut dan satu lembah yang terdiri dari tiga simpul. - Gambar 9. Titik perut dan titik simpul gelombang stasioner ujung bebas Sensor Koil elektromagnetik adalah Sensor koil elektromagnetik perangkat yang berfungsi sebagai transduser yang menangkap getaran mekanik dari dawai dan mengubahnya menjadi sinyal elektrik yang kemudian diteruskan ke penguat suara. Prinsip dasarnya adalah dengan memanfaatkan induksi elektromagnet, yang mana getaran senar "mengganggu" garis-garis gaya elektromagnetik. Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 Gambar 11. Spul Gitar Spul Gitar magnetik terdiri atas sebuah magnet permanen, seperti AlNiCo, yang dibalut dengan ratusan lilitan kawat berlapis tembaga. Pickup magnetik paling sering ditemukan di bagian badan gitar, walaupun terkadang juga dipasang di bagian bridge maupun leher gitar, seperti pada kebanyakan gitar jazz elektro-akustik. Getaran senar yang kemagnetannya rendah memodulasi fluks magnetik pada kumparan pickup, sehingga menginduksi arus bolak-balik yang melalui kawat kumparan. Sinyal ini kemudian diteruskan melalui kabel untuk diperkuat maupun direkam. Secara umum, cara kerja pickup dapat digambarkan menggunakan konsep sirkuit magnetik, dimana getaran senar akan mempengaruhi reluktans magnetik di dalam sirkuit yang dihasilkan oleh magnet permanen. - Magnet Neodymium Gambar 12. Magnet Neodymium Neodymium adalah kombinasi dari beberapa logam yang memiliki sifat magnet yang sangat kuat. Dikenal dengan beberapa nama, seperti NIB magnet, neos, Neodymium-Iron-Boron atau Nd-Fe-B magnet. Magnet ini mampu mengangkat logam yang berpuluh kali lipat lebih berat dibanding massanya sendiri. Dengan adanya kekuatan kemagnetan yang sangat besar ini, kita bisa mengaplikasikannya di banyak bidang, atau meningkatkan kualitas sesuatu yang melibatakan magnet di dalamnya. Sangat banyak hal yang menyenangkan yang bisa kita lakukan dengan magnet yang kuat, mulai dari permainan, fungsi keseharian, hingga percobaan serius. - Komunikasi Serial Komunikasi serial adalah komunikasi dimana pengiriman data dilakukan per bit, sehingga lebih lambat dibandingkan komunikasi parallel seperti pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh komunikasi serial adalah mouse, scanner dan sistem akuisisi data yang terhubung ke port COM1 / COM2. Pada prinsipnya, komunikasi serial adalah komunikasi dimana transmisi data dilakukan per bit. Interface serial hanya membutuhkan jalur yang sedikit (umumnya hanya 2 jalur), sehingga lebih menghemat pin jika dibandingkan dengan interface parallel. Komunikasi serial ada 2 macam, asynchronous serial dan synchronous serial : • Synchronous serial adalah komunikasi dimana hanya ada satu pihak (pengirim dan penerima) yang menghasilkan clock dan mengirimkan clock tersebut bersama-sama dengan data. Contoh penggunaan synchronous serial terdapat pada transmisi data keyboard. • Asynchronous serial adalah komunikasi dimana kedua pihak (pengirim dan penerima) masing-masing menghasilkan clock namun hanya data yang ditransmisikan, tanpa clock. Agar data yang dikirim sama dengan data yang diterima, maka kedua frekuensi clock harus sama dan harus terdapat sinkronisasi. Setelah ada sinkronisasi, pengirim akan mengirimkan datanya sesuai dengan frekuensi clock penerima. Contoh penggunaan asynchronous serial adalah pada Universal Asynchronous Receiver Transmitter (UART) yang digunakan pada serial port (COM) computer. Sistem komunikasi serial bisa dengan menggunakan berbagai macam protocol. protocol-protocol yang bisa digunakan untuk komunikasi serial adalah sebagai berikut : • Komunikasi serial RS232 adalah suatu protocol komunikasi serial yang mode pengoperasiannya single ended artinya Signal RS232 di representasikan dengan level tegangan +3V sampai +12V sebagai ON atau stat 0 atau disebut sebagai kondisi SPACE, sedangkan tegangan -3V sampai 12V direprensentasikan sebagai OFF atau stat 1 atau disebut sebagai kondisi MARK. Komunikasi data pada RS232 dilakukan dengan satu transmitter dan satu reciever, Jadi sistem komunikasinya yaitu antara 2 device saja.RS232 dirancang untuk data rate maximum 20 kb/s dan dengan jarak maksimum sekitar 20 Ft. Signal RS232 di representasikan dengan level tegangan +3V sampai +12V sebagai ON atau stat 0 atau disebut sebagai kondisi SPACE, sedangkan tegangan -3V sampai -12V direprensentasikan sebagai OFF atau stat 1 atau disebut sebagai kondisi MARK. Komunikasi serial dengan RS232 ini dipasaran sudah tersedia IC yang dapat digunakan dan sudah compatible mikrokontroller yaitu IC 232 seperti MAX232, dll. IC ini banyak di gunakan dalam aplikasi-aplikasi komunikasi data dengan RS232. - Motor DC Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolakbalik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. Gambar 14. Sinyal PWM Pada gambar 2.13 adalah salah satu bentuk gelombang dari signal PWM. *+, adalah waktu keluaran bernilai tinggi “ high “ dan *+-- waktu keluaran bernilai rendah “ low ”. Sedangkan *./01+2/ adalah waktu keseluruhan dari gelombang PWM tersebut. Dimana T4567895 = T8: + T8<< ..............................................(2.34) Gambar 15. Bentuk signal PWM dengan variasi duty cycle 12.5 % dan 75 % Gambar 13. Konstruksi Motor DC Belitan stator merupakan elektromagnet, dengan penguat magnet terpisah F1-F2. Belitan jangkar ditopang oleh poros dengan ujung-ujungnya terhubung ke komutator dan sikat arang A1-A2. Arus listrik DC pada penguat magnet mengalir dari F1 menuju F2 menghasilkan medan magnet yang memotong belitan jangkar. Belitan jangkar diberikan listrik DC dari A2 menuju ke A1. Sesuai kaidah tangan kiri jangkar akan berputar berlawanan jarum jam. Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lorentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. - Pulse Width Modulation PWM adalah suatu teknik yang digunakan untuk mengontrol kerja dari suatu alat atau menghasilkan suatu tegangan DC yang variabel. Rangkaian PWM adalah rangkaian yang lebar pulsa tegangan keluarannya dapat diatur atau dimodulasi oleh sebuah sinyal tegangan modulasi. Disamping itu kita dapat menghasilkan suatu sinyal PWM dengan menentukan frekuensi dan waktu dari variabel ON dan OFF. Pemodulasian sinyal yang beragam dapat menghasilkan duty cycle yang diinginkan. - Perancangan Piranti Elektronika Alat Pengukur Kecepatan Rambat Gelombang pada Kawat Sistem pengukur kecepatan rambat gelombang pada kawat dengan metode Melde adalah untuk membuktikan bahwa cepat rambat gelombang (v) berbanding lurus dengan tegangan tali (F) yang mana cepat rambat gelombang bertambah, begitu pula sebaliknya, apabila tegangan talinya berkurang atau diperkecil maka cepat rambatnya akan kecil. Piranti elektronika ini terdiri dari sensor strain gauge dan Sensor koil elektromagnetik, rangkaian minimum sistem mikrokontroler yang dilengkapi dengan rangkaian ADC sebagai pengkondisi signal dan komunikasi serial untuk melakukan komunikasi antara rangkaian elektronika dengan komputer. Secara garis besar cara kerja piranti elektronikanya digambarkan pada blok diagram seperti gambar Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 - Perancangan Perangkat Elektronik Sistem elektronika pada sistem instrumentasi ini terdiri atas skematik Mikrokontroler, Strain gauge amplifier (AD620), precision, driver motor, power supply 5 volt dan power supply ± 12 volt. - Rangkaian (AD620) Strain gauge amplifier Gambar 16. Blok diagram sistem alat pengukur kecepatan rambat gelombang pada kawat Pada gambar 16, gaya tegang tali diberikan oleh tarikan motor dc, sedangkan besar gaya tarikannya dibaca oleh sensor strain gauge. Untuk membangkitkan gelombang pada kawat, kawat akan dialiri sinyal listrik sinusoidal yang frekuensinya dapat diatur, dan kawat diletakkan diantara dua buah kutub magnet permanen. Batang magnet permanen dipasang ditengah – tengah panjang kawat. Untuk mengetahui besarnya simpangan getaran yang timbul, digunakan sensor koil elektromagnetik yang akan menghasilkan tegangan listrik sebanding dengan besarnya simpangan getaran pada kawat. Tegangan listrik yang dihasilkan akan dibaca oleh mikrokontroler melalui ADC. Semua proses pengaturan dan pengambilan data dilakukan oleh mikrokontroler, dan hasilnya ditampilkan ke komputer yang terhubung melalui komunikasi serial. - Perancangan Mekanik Alat Pengukur Kecepatan Gelombang Pada Kawat Sistem mekanik alat pengukur kecepatan rambat gelombang pada kawat adalah sebagai sumber getaran yang akan diukur frekuensinya. Gelombang yang terjadi karena kawat yang teraliri arus listrik melewati medan magnet yang cukup besar sehingga terjadi gelombang. Untuk mendapatkan data hasil pengukuran yang baik maka perancangan sistem mekanik harus mempertimbangkan beberapa hal diantaranya kawat yang digunakan, detektor (sensor) koil elektromagnetik yang digunakan, motor DC sebagai penarik kawat, magnet yang digunakan, sensor strain gauge dengan model ditarik. Gambar 17. Sistem mekanik Alat Pengukur Kecepatan Rambat Gelombang pada kawat dengan kondisi tampak dari atas Gambar 19. Rangkaian Strain gauge amplifier (AD620) Rangkaian Strain gauge amplifier ini berfungsi sebagai penguat tegangan yang dihasilkan oleh sensor Strain gauge amplifier yang hanya menghasilkan tegangan yang sangat kecil sehingga membutuhkan suatu rangkaian penguat agar tegangan yang dihasilkan dapat terbaca oleh ADC. Pada JP1 sebagai tegangan untuk rangkaian strain gauge amplifier dimana terdapat 3 kaki masukan yaitu kaki 1 +12V, kaki 2 ground dan pada kaki 3 -12V. Pada JP2 terdapat 4 kaki masukan, dimana 2 kaki sebagai supply strain gauge yaitu sebesar 3,12V dan 2 kaki sebagai input sensor strain gauge yang hasil tegangannya akan diperkuat sesuai dengan keperluan. Pada 2 kaki tegangan sensor langsung terhubung pada diode zener 4v6, dimana keluaran dari diode zener akan menghasilkan tegangan 3,12V yang dialirkan dari tegangan strain gauge amplifier yang sebesar ± 12V sedangkan 2 kaki input sensor merupakan hasil keluaran tegangan dari sensor strain gauge. VR2 sebagai pengatur batas bawah tegangan sensor untuk dijadikan 0V karena sensor strain gauge sudah menghasilkan tegangan sebelum diberi beban sedangkan fungsi VR1 sebagai pengatur batas atas tegangan dan RG yang dapat diatur berapa besar penguatan yang diinginkan oleh peneliti atau sama dengan tegangan keluaran maximum sensor sebesar 4,89 Volt, Fungsi dari R2 dan C1 sebagai filter yang berguna agar nilai tegangan yang dihasilkan oleh AD620 tidak fluktuatif, dan hasil dari penguatan AD620 dikeluarkan pada J3 yang akan dihubungkan dikaki ADC pada mikrokontroler. Gambar 18. Sistem mekanik Alat Pengukur Kecepatan Rambat Gelombang pada kawat dengan kondisi nampak dari bawah Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 - Rangkaian Precision Gambar 20. Rangkaian Precision memiliki daya hingga 150 watt dan arus yang dikeluarkan sampai 10A dengan cara ini arus yang masuk ke regulator hanya sedikit. Output membutuhkan arus besar maka disuplai oleh transistor apabila transistor mampu bertahan pada arus yang besar maka sistem ini akan menjadi stabil karena tidak dibebani arus yang besar. Arus besar akan melewati transistor dengan demikian fungsi transistor ini adalah untuk menyuplai arus yang besar dan regulator untuk penstabil tegangan. Dan J2 akan masuk ke perangkat mikrokontroler sebagai supply tegangan. Power supply ±12V yang berfungsi sebagai supply untuk motor DC, rangkaian precision, dan strain gauge amplifier. Rangkaian Precision digunakan untuk menghubungkan dengan detektor koil elektromagnetik dimana berfungsi sebagai perubahan sinyal arus bolak balik menjadi sinyal arus searah sehingga dapat dihubungkan dan dibaca dengan mikrokontroler. Dalam hal ini dilakukan 2 kali penguatan dengan rangkaian noninverter. Sehingga ketika masuk kedalam rectifier maka tegangan yang berawal masih dalam kondisi arus bolak balik maka diubah menjadi arus searah. - Rangkaian Driver Motor Sebuah motor DC dapat dibuatkan sistem elektronik yang dapat bergerak maju dan mundur karena berfungsi sebagai menarik dan mengendurkan regangan pada kawat dengan tegangan yang di berikan 24 volt dan kecepatan motor tersebut konstan. Gambar 23. Rangkaian regulator ±12V Seperti halnya power supply 5V sebelumnya, cara kerja power supply ini hampir sama dengan power supply 12V yang berbeda pada rangkaian ini peneliti membutuhkan tegangan ±12V, sehingga pada rangkaian ini membutuhkan IC regulator LM7912 yang dapat membuat teganagan supply menghasilkan keluaran – 12V. Sehingga pada kaki 1 J4 akan menghasilkan +12V, kaki 2 ground sedangkan kaki 3 menghasilkan -12V. - Gambar 21. Rangkaian Driver motor Rangkaian Power Supply Power supply adalah rangkaian elektronika yang berfungsi untuk memasok daya ke komponen lain pada perangkat elektronika. Semua komponen elektronika yang ada dalam suatu perangkat elektronika akan memperoleh pasokan daya dari power supply tersebut. Perancangan Piranti Lunak Perancangan perangkat lunak dari sistem alat pengukur kecepatan rambat gelombang pada kawat ini terbagi menjadi dua bagian, yaitu perencanaan program mikrokontroler dan program LabVIEW. - Gambar 22. Rangkaian regulator 5V Pada pin J1 pin kaki 1 dihubungkan ke ground dan kaki 2 dihubungkan ke 12V. Diode (D1) pada rangkaian ini digunakan sebagai penyearah arus yang masuk melalui PLN, diode ini akan mengubah tegangan ac menjadi dc sesuai yang dibutuhkan power supply. Regulator IC 7805 berguna untuk menjaga tegangan stabil sedangkan arus akan di-supply oleh transistor TIP2955 karena - Pemrograman Mikrokontroler Mikrokontroler pada sistem ini digunakan untuk membaca data dari sensor strain gauge dan detektor koil elektromagnetik. Data perubahan cepat rambat yang merupakan besaran analog dikonversi menjadi besaran digital oleh ADC pada mikrokontroler. Tegangan anolog ini diumpankan melalui port ADC yang terintegrasi pada IC ATmega8. Bahasa yang akan digunakan sebagai compiler pada mikrokontroler ini adalah bahasa BASIC pada BASCOM AVR. Karena akan menggunakan beberapa device pada satu com port, maka metode pemrogramannya adalah master slave. Komputer akan sebagai master sedangkan mikrokontroler sebagai slave, dimana pada tiap-tiap slave akan diberikan alamat yang berbeda agar data yang dikirimkan hanya sampai ke slave yang dituju. Sebelum master mengirimkan data semua peralatan elektronik atau slave berada pada posisi penerima hingga salah satu memerlukan untuk mengirimkan data, maka peralatan tersebut akan berpindah ke-mode Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 pengirim, mengirimkan data dan kembali ke-mode penerima. Setiap kali peralatan elektronik tersebut hendak mengirimkan data, maka terlebih dahulu harus diperiksa, apakah jalur yang akan digunakan sebagai media pengiriman data tersebut tidak sibuk. Apabila jalur masih sibuk, maka peralatan tersebut harus menunggu hingga jalur sepi. Peralatan elektronik - elektronik yang lain akan menerima data tersebut, maka data selanjutnya akan diambil untuk diproses lebih lanjut. Gambar 24. Diagram alur program mikrokontroler Dalam diagram diatas, diagram alur dari program mikrokontroler yang digunakan program BASCOM AVR untuk mikrokontroler, kristal dan baudrate yang digunakan. Pada saat start, sistem mikrokontroler berjalan dengan pendefinisian fungsi portb.1 dan portb.2 sebagai pengaturan pwm, portd.7 dan portb.0 sebagai output motor dc, portc.5 sebagai sensor strain gauge, portc.4 sebagai detektor koil elektromagnetik. Dimana ketika program kendali dan monitoring alat ukur kecepatan gelombang pada kawat berjalan, maka akan mengaktifkan motor dc, sensor strain gauge, dan detektor koil elektromagnetik. Ketika gaya sudah didapatkan maka motor dc akan berhenti dan function generator akan aktif menghasilkan sinyal listrik yang tersambung dengan kawat. Semua pembacaan data gaya dan frekuensi akan dikirim pada program kendali dan monitoring alat ukur kecepatan gelombang pada kawat kemudian didisplaykan pada xy graph. Proses akan berulang sampai nilai frekuensi resonansi yang didapatkan dari setiap gaya yang diukur didapat. - Gambar 25. Diagram alur penerimaan data pada kendali dan monitoring alat pengukur kecepatan rambat gelombang pada kawat berbasis LabVIEW Setelah inisialisasi maka program kendali dan monitoring alat ukur kecepatan gelombang pada kawat akan menunggu sampai tombol start di tekan. Setelah tombol start ditekan maka program kendali dan monitoring alat pengukur kecepatan rambat gelombang pada kawat akan mengirimkan data gaya ke mikrokontroler dan jika sistem sudah ready, maka mikrokontroler akan mengirim frekuensi, data frekuensi dan amplitudo akan terbaca di kendali dan monitoring alat berbasis LabVIEW berupa grafik frekuensi dan amplitudo. Jika data yang diharapkan sudah didapat maka dapat di save dan scan data akan tetap berjalan, maka data tersebut akan di simpan dalam excel. Berikut tampilan front panel LabVIEW : Pemrograman Kendali dan Monitoring Alat Pengukur Kecepatan Rambat Gelombang pada Kawat di LabVIEW Berikut ini merupakan diagram alur dari program kendali dan monitoring alat pengukur kecepatan gelombang pada kawat. Gambar 26. Front panel monitoring LabVIEW Pada gambar 26 flowchart program kendali dan monitoring alat pengukur kecepatan rambat gelombang pada kawat digunakan untuk pengendalian pwm function generator dan menampilkan data yang telah terukur melalui mikrokontroler. Ketika program LabVIEW diaktifkan maka sistem akan menunggu nilai masukan gaya yang akan diukur. Dan berapa massa persatuan panjang yang sudah dihitung. Ketika Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 Gaya 0,5 Newton dengan µ = 0,975 x 10-4 Kg/m - 25 Nilai ADC Amplitudo tombol start ditekan sistem akan mengirimkan perintah power motor (pwm) pada mikrokontroler dan motor akan berputar kemudian mikrokontroler akan membaca data adc dari sensor gaya, ketika nilai adc sudah sesuai maka motor berhenti sesuai dengan gaya yang diharapkan. Data yang telah dibaca oleh mikrokontroler akan dikirimkan lagi pada program kendali dan monitoring alat ukur kecepatan rambat gelombang pada kawat dan akan pada panel LabVIEW. Dalam display LabVIEW akan tampil grafik gelombang yang didapatkan dari input detektor koil elektromagnetik berupa tegangan adc. ketika data gelombang sudah didapatkan maka tombol save ditekan dan sistem akan berhenti lalu sistem akan menyimpan data yang telah diambil ketika program kendali dan monitoring alat pengukur kecepatan rambat gelombang pada kawat dijalankan dan disimpan di excel. Lihat gambar 27. Frekuensi (Hz) Vs Nilai ADC Amplitudo 20 15 10 5 0 0 50 100 150 200 250 Frekuensi (Hz) Gambar 28. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 0,5 N Dalam grafik bisa dilihat bahwa nilai ADC amplitudo tertinggi berada pada frekuensi 126 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. Rumus Percobaan : λ=2xl λ = 2 x 0,32 m λ = 0,64 m =λxf Gambar 27. Blok diagram monitoring LabVIEW Pada blok diagram monitoring pada LabVIEW terdapat 7 blok bagian. Dimana pada blok pertama berada pada sisi kiri gambar 3.16 terdapat perintah untuk mengaktifkan tombol start yang berada pada sebuah loop, yang artinya ketika tombol belum ditekan maka sistem tidak akan bekerja ke-step selanjutnya meskipun nilai gaya dan massa persatuan panjang dimasukkan. Setelah proses blok kiri terpenuhi maka sistem akan berjalan kestep selanjutnya, dimana jika nilai cepat rambat dalam perhitungan sudah didapat maka nilai tersebut diubah dari desimal ke-string sehingga bisa terbaca oleh program kendali dan monitoring alat ukur kecepatan rambat gelombang pada kawat. Lalu dikirim ke visa write untuk memberikan perintah pada mikrokontroler. Perintah dari mikrokontroler dikirim ke visa read untuk dibandingkan setelah tanda ‘R’ terpenuhi maka bisa berjalan ke-step selanjutnya. Pada blok selanjutnya maka nilai pwm akan aktif mulai dari angka 30 sampai 1020 yang iterasi 5 angka, dalam setiap kenaikan 5 angka tersebut akan dibaca oleh visa read hasilnya akan di plot ke xy graph. tanda save yang berada pada loop artinya ketika tombol save ditekan maka sistem akan berhenti dan data yang sudah didapat akan di save. HASIL DAN PEMBAHASAN Membahas penentuan nilai konstanta pegas yang digunakan, dan pengambilan data dari sistem yang dibuat. Pengujian – pengujian tersebut meliputi: = 0,64 x 126 Hz = 80,64 m/s Rumus Melde : == == > 0,0975 0,5 B 10⁻³ Kg/m = 71,61 m/s Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. Tabel 1. Data percobaan gaya 0,5 Newton Gaya (N) 0,5 0,5 0,5 0,5 0,5 f (Hz) 127 128 126 134 128 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 V λ (meter) 0,64 0,64 0,64 0,64 0,64 percobaan (m/s) 81,28 81,92 80,64 85,76 81,92 Σv = 82,304 v Melde (m/s) 71,61 71,61 71,61 71,61 71,61 Σv = 71,61 Kesalahan relative = K =K ΣL M56N8OPP:' ΣL Q5R95 ΣL M56N8OPP: S ,$T(')#,U# S ,$T( K x 100% K x 100 % Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. Tabel 2. Data percobaan gaya 1 Newton = 12,99 % Ketepatan = 100% - 12,99 % = 87,01 % Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 12,99% dan ketepatan 87,01%. Kesalahan ini didapat karena kecilnya nilai dari detektor koil elektromagnetik, ini dikarenakan detektor koil elektromagnetik yang digunakan kurang sensitif. Nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde memiliki selisih 10,649 m/s. Jika dilihat dari nilai kumulatif yang didapatkan. f (Hz) 189 186 181 190 180 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 V λ (meter) 0,64 0,64 0,64 0,64 0,64 percobaan (m/s) 120,96 119,04 115,84 121,6 115,2 Σv = 118,53 ΣL M56N8OPP:' ΣL Q5R95 Kesalahan relative = K ΣL M56N8OPP: ##S,%$'#T#, ) Gaya 1 Newton dengan µ = 0,975 x 10-4 Kg/m =K Frekuensi (Hz) Vs Nilai ADC Amplitudo = 14,56 % - Nilai ADC Amplitudo Gaya (N) 1 1 1 1 1 ##S,%$ v Melde (m/s) 101,27 101,27 101,27 101,27 101,27 Σv = 101,27 K x 100 % K x 100% 40 Ketepatan 30 = 100% - 14,56 % 20 = 85,44 % 10 0 0 100 200 Frekuensi (Hz) 300 400 Gambar 29. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 1 N Dalam grafik bisa dilihat bahwa nilai ADC amplitudo tertinggi berada pada frekuensi 186 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 14,56% dan ketepatan 85,44%. Kesalahan ini didapat karena kecilnya nilai dari detektor koil elektromagnetik, ini dikarenakan detektor koil elektromagnetik yang digunakan kurang sensitif. Nilai cepat rambat percobaan dengan nilai cepat rambat dalam perhitungan Melde, memiliki selisih 17,26 m/s. Jika dilihat dari nilai kumulatif dari nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde. - Gaya 1,5 Newton dengan µ = 0,975 x 10-4 Kg/m Rumus Percobaan : Frekuensi (Hz) Vs Nilai ADC Amplitudo λ=2xl Nilai ADC Amplitudo λ = 2 x 0,32 m λ = 0,64 m =λxf = 0,64 m x 186 Hz 40 30 20 10 0 0 100 200 300 Frekuensi (Hz) = 119,04 m/s Gambar 30. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 1,5 N Rumus Melde: == == > 0,0975 1B 10⁻³ Kg/m Dalam grafik bisa dilihat bahwa nilai ADC amplitudo tertinggi berada pada frekuensi 231 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. = 101,27 m/s Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 400 Rumus Percobaan : Gaya 2 Newton dengan µ = 0,975 x 10-4 Kg/m - λ=2xl Nilai ADC Amplitudo λ = 2 x 0,32 m λ = 0,64 m =λxf = 0,64 m x 231 Hz = 147,84 m/s Frekuensi (Hz) Vs Nilai ADC Amplitudo 80 60 40 20 0 0 100 200 Frekuensi (Hz) 300 400 Rumus Melde: == == Gambar 31. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 2 N > 0,0975 Dalam grafik bisa dilihat bahwa nilai ADC amplitudo tertinggi berada pada frekuensi 235 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. 1,5 B 10⁻³ Kg/m = 124,03 m/s Rumus Percobaan : Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. Tabel 3. Data percobaan gaya 1,5 Newton Gaya (N) 1,5 1,5 1,5 1,5 1,5 f (Hz) 231 236 227 229 226 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 V λ (meter) 0,64 0,64 0,64 0,64 0,64 Kesalahan relative = K =K Ketepatan percobaan (m/s) 147,84 151,04 145,28 146,56 144,64 Σv = 147,07 ΣL M56N8OPP:' ΣL Q5R95 ΣL M56N8OPP: #(),T)'# (,T$ #(),T) K x 100% v Melde (m/s) 124,03 124,03 124,03 124,03 124,03 Σv = 124,03 K x 100 % λ=2xl λ = 2 x 0,32 m λ = 0,64 m =λxf = 0,64 m x 235 Hz = 150,4m/s Rumus Melde : == > = 15,66 % == = 100% - 15,66 % = 143,22 m/s = 84,34% Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 15,66% dan ketepatan 84,34%. Kesalahan ini didapat karena kecilnya nilai dari detektor koil elektromagnetik, ini dikarenakan detektor koil elektromagnetik yang digunakan kurang sensitif. Hal ini bisa dikarenakan rancangan mekanik yang kurang baik. Nilai cepat rambat percobaan dengan nilai cepat rambat dalam perhitungan Melde, memiliki selisih 23,03 m/s. Jika dilihat dari nilai kumulatif dari nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde. 0,0975 2B 10⁻³ Kg/m Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. Tabel 4. Data percobaan gaya 2 Newton Gaya (N) 2 2 2 2 2 f ( Hz) 250 252 248 244 255 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 V λ (meter) 0,64 0,64 0,64 0,64 0,64 percobaan (m/s) 160 161,28 158,72 156,16 163,2 Σv = 159,87 v Melde (m/s) 143,22 143,22 143,22 143,22 143,22 Σv = 143,22 Kesalahan relative = K WL M56N8OPP:' WL Q5R95 WL M56N8OPP: #%X,S) '#($, =K #%X,S) K x 100% K x 100 % == 0,0975 2,5 B 10⁻³ Kg/m = 160,12 m/s = 10,41 % Ketepatan Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. = 100% - 10,41 % Tabel 5. Data percobaan gaya 2,5 Newton = 89,59 % Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 10,41% dan ketepatan 89,59%. Kesalahan ini didapat karena kecilnya nilai dari detektor koil elektromagnetik, ini dikarenakan detektor koil elektromagnetik yang digunakan kurang sensitif. Hal ini bisa dikarenakan rancangan mekanik yang kurang baik. Nilai cepat rambat percobaan dengan nilai cepat rambat dalam perhitungan Melde, memiliki selisih 16,65 m/s. Jika dilihat dari nilai kumulatif dari nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde. Gaya 2,5 Newton dengan µ = 0,975 x 10-4 Kg/m - Nilai ADC Amplitudo Frekuensi (Hz) Vs Nilai ADC Amplitudo Gaya (N) 2,5 2,5 2,5 2,5 2,5 f (Hz) 277 285 270 279 280 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 Kesalahan relative = K V λ (meter) 0,64 0,64 0,64 0,64 0,64 WL M56N8OPP:' WL Q5R95 WL M56N8OPP: #)S,T% '#UT,# =K 60 50 40 percobaan (m/s) 177,28 182,4 172,80 178,56 179,2 Σv = 178,05 #)S,T% K x 100% v Melde (m/s) 160,12 160,12 160,12 160,12 160,12 Σv = 160,12 K x 100 % = 10,07 % 30 Ketepatan 20 10 = 100% - 10,07 % = 89,93 % 0 0 100 200 300 400 500 Frekuensi (Hz) Gambar 32. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 2,5 N Dalam grafik bisa dilihat bahwa nilai ADC amplitudo tertinggi berada pada frekuensi 270 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. Rumus Percobaan : Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 10,07% dan ketepatan 89,93%. Nilai yang didapat cukup baik dilihat dari kesalahan relative yang cukup kecil, namun kesalahan ini bisa didapat karena detektor koil elektromagnetik yang digunakan kurang sensitif. Nilai cepat rambat percobaan dengan nilai cepat rambat dalam perhitungan Melde, memiliki selisih 16,65 m/s. Jika dilihat dari nilai kumulatif dari nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde. Gaya 3 Newton dengan µ = 0,975 x 10-4 Kg/m - λ=2xl Frekuensi (Hz) Vs Nilai ADC Amplitudo 80 Nilai ADC Amplitudo λ = 2 x 0,32 m 60 λ = 0,64 m =λxf 40 20 0 = 0,64 m x 270 Hz 0 200 400 Frekuensi (Hz) = 172,8 m/s Rumus Melde : == > Gambar 33. Grafik antara Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 3 N Dalam grafik bisa dilihat bahwa nilai amplitudo tertinggi berada pada frekuensi 340 Hz. Dimana pada frekuensi tersebut terjadinya resonansi pertama yang penulis dapatkan dalam percobaan. Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 600 Maka frekuensi tersebut dianggap sebagai frekuensi resonansi pada ordo pertama. - Hasil dari Grafik Labview Dari hasil dari grafik program labview yang penulis ambil dengan cara pengambilan satu persatu pergantian gaya dan terus diambil dengan 5 sampel pengambilan data dari tiap gaya yang penulis ambil sehingga kita bisa ambil dari sampel tersebut bahwa data yang penulis ambil untuk mendapatkan frekuensi resonansinya memiliki perbedaan namun tidak terlalu jauh perbedaan yang terjadi. Berikut beberapa sampel yang penulis tampilkan : Rumus Percobaan : λ=2xl λ = 2 x 0,32 m λ = 0,64 m =λxf = 0,64 m x 340 Hz = 217,6 m/s Rumus Melde : == == > 0,0975 3B 10⁻³ Kg/m Gambar 34. Percobaan 1 Grafik LabView Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 2 N = 175,41 m/s Hal ini dilakukan dengan 5 kali percobaan dan berikut hasil percobaannya. Tabel 6. Data percobaan gaya 3 Newton Gaya (N) 3 3 3 3 3 f (Hz) 340 323 330 327 332 µ 10⁻³ (Kg/m) 0,0975 0,0975 0,0975 0,0975 0,0975 V λ (meter) 0,64 0,64 0,64 0,64 0,64 percobaan (m/s) 217,6 206,72 211,2 209,28 212,48 Σv = 211,45 ΣL M56N8OPP:' ΣL Q5R95 Kesalahan relative = K =K ΣL M56N8OPP: ##,(% '#)%,(# ##,(% v Melde (m/s) 175,41 175,41 175,41 175,41 175,41 Σv = 175,41 K x 100 % K x 100% = 17,04 % Ketepatan = 100% - 17,04 % = 82,96 % Dari perhitungan yang penulis dapatkan dalam 5 kali percobaan maka bisa kita lihat bahwa kesalahan relative 17,04% dan ketepatan 82,96%. Nilai yang didapat tidak cukup baik dilihat dari kesalahan relative yang cukup besar, namun kesalahan ini bisa didapat karena detektor koil elektromagnetik yang digunakan kurang sensitif dan nilai frekuensi resonansi yang didapat cukup jauh jika dilihat dari nilai frekuensi resonansi yang didapat dari gaya 2,5 Newton. Nilai cepat rambat percobaan dengan nilai cepat rambat dalam perhitungan Melde, memiliki selisih 36,04 m/s. Jika dilihat dari nilai kumulatif dari nilai cepat rambat percobaan dengan nilai cepat rambat perhitungan Melde. Gambar 35. Percobaan 2 Grafik LabView Frekuensi (Hz) vs Nilai ADC Amplitudo dengan Gaya 2 N - Nilai Frekuensi Resonansi (Hz) dengan Gaya (Newton) Dalam tabel dibawah ini menunjukkan perbandingan gaya yang diatur sehingga mendapatkan frekuensi resonansi yang terjadi di setiap gaya. Dalam setiap perubahan gaya yang dilakukan, adanya perubahan frekuensi resonansi yang didapatkan, dari data yang didapat menunjukkan bahwa semakin besar gaya yang diatur maka frekuensi resonansi yang didapat semakin besar pula. Berikut tabel dan grafik yang dapat kita lihat. Tabel 7. Data Frekuensi Resonansi dengan Gaya yang diatur No. Gaya (Newton) Frekuensi Resonansi (Hz) 1 0,5 126 2 1 186 3 4 5 6 1,5 2 2,5 3 231 235 270 340 Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012 berfungsi mengambil data frekuensi resonansi. Sehingga sering terjadi kesalahan menentukan puncak terjadinya frekuensi resonansi. Frekuensi Resonansi (Hz) Frekuensi Resonansi (Hz) Vs Gaya (Newton) 400 300 200 100 DAFTAR REFERENSI 0 0 1 2 Gaya (Newton) 3 4 1. Gambar 36. Grafik Frekuensi resonansi (Hz) Vs Gaya (newton) Dalam grafik ini bisa dilihat tingkatan nilai frekuensi resonansi terhadap gaya yang dilakukan dalam pengambilan data. Dimana semakin gaya dinaikkan maka frekuensi resonansi yang didapat juga semakin besar. Jika dilihat dari rumus : 2. 3. 4. v = λ.f 5. Dengan λ adalah panjang kawat baja yang digunakan pada percobaan, dimana nilai λ didapat 2 kali panjang kawat baja sedangkan nilai frekuensi resonansi diberikan melalui mikrokontroler dengan memvariasikan nilai PWM. Jika semakin besar nilai PWM yang diberikan maka nilai frekuensi resonansi juga akan semakin besar. Maka jika panjang kawat diketahui dan frekuensi resonansi diketahui maka jika memakai rumus diatas, akan didapat nilai cepat rambat yang akan semakin besar jika gaya yang diberikan semakin besar pula. 6. 7. Raymond, A.S dan John, W.J (2010) Physics for Scientists and Engineers with Modern physics, Brooks/Cole 20 Davis Drive Belmont, CA 94002-3098 USA http://www.docstoc.com/docs/68169790/prakt ikum-fisika http://www.scribd.com/doc/55682189/Percoba an-Melde http://fisika12.blogspot.com/2010/08/blogpost.html http://marfuatunnurendah.blog.uns.ac.id/2009/ 09/11/gelombang/ http://www.crayonpedia.org/mw/E._Gelomba ng_Transversal_dan_Gelombang_Longitudina l_12.1 http://www.meriwardana.com/2011/11/prinsip -kerja-motor-arus-searah-dc.html KESIMPULAN Berikut merupakan kesimpulan dari hasil eksperimen yang dilakukan secara langsung bahwa : 1. Rancang bangun alat pengukur kecepatan rambat gelombang pada kawat telah selesai dibuat dan dapat digunakan sebagai pengukur kecepatan rambat gelombang pada kawat 2. Piranti elektronika yang digunakan untuk pengukuran kecepatan rambat gelombang pada kawat digunakan detektor koil elektromagnetik, dan piranti yang digunakan untuk menghasilkan sinyal listrik yang dapat bervariasi pada kawat, digunakan function generator. Piranti elektronika yang digunakan untuk mengirimkan data percobaan ke komputer digunakan komunikasi serial RS232 sebagai penghubung antara alat pengukur kecepatan rambat gelombang pada kawat dengan komputer. 3. Dari hasil yang didapatkan adanya perubahan nilai frekuensi resonansi disetiap perubahan gaya yang dilakukan pengukuran. Semakin besar gaya yang diberikan pada kawat maka semakin besar frekuensi resonansi yang didapatkan. Jika frekuensi resonansi diketahui dan juga λ yang telah diketahui maka akan didapatkan cepat rambat. Dilihat dari rumus : v=λ .f hal ini dapat dibuktikan grafik frekuensi resonansi (Hz) vs gaya (Newton), faktor lain yang mempengaruhi data yang didapat kurang baik karena komponen mekanik berbahan yang dapat mengaliri listrik sangat mempengaruhi detektor koil elektromagnetik yang Rancang bangun ..., Arie Fajrianto Nugroho, FMIPA UI, 2012