BAB I PENDAHULUAN 1.1. Latar Belakang Dewasa ini
advertisement

BAB I
PENDAHULUAN
1.1. Latar Belakang
Dewasa ini kemajuan ilmu pengetahuan dan teknologi mengalami perkembangan dan
kemajuan begitu pesat. Berkembangnya ilmu pengetahuan mendorong manusia berusaha
menciptakan peralatan-peralatan canggih untuk teknologi mutakhir, baik itu di bidang bisnis
dan perdagangan, kesehatan, militer, pendidikan, komunikasi dan budaya maupun bidangbidang lainnya. Salah satu diantaranya adalah teknologi serat optik. Teknologi ini yang
merupakan pemanfaat cahaya sebagai media pembawa informasi saat ini berkembang pesat.
Pada awalnya teknologi ini hanya untuk komunikasi dan informasi pengiriman data. Namun
dewasa ini teknologi serat optik ini dapat digunakan dalam banyak keperluan. Salah satu
diantaranya adalah dalam bidang sensor. Ada banyak sensor yang merupakan aplikasi
teknologi serat optik, diantaranya Fiber Optic Bio and Chemical Sensors, Fiber Optic
Gyroscope Sensors, Fiber Optic Bend Sensors (Yin. 2002). Penggunaan serat optik sebagai
sensor, ada tiga metode yang dapat diaplikasikan yaitu :
1. Sensor berbasis teknik modulasi fase adalah membandingkan fase cahaya yang diindera
oleh serat optik (probe) terhadap serat optik acuan (reference) dalam piranti
interferometer laser.
2. Sensor berbasis teknik modulasi panjang gelombang adalah menggunakan FBG (Fiber
Bragg Grating) sebagai pengindera (sensing) untuk melakukan transformasi langsung
besaran fisis yang diindera ke dalam pergeseran panjang gelombang.
3. Sensor berbasis teknik modulasi intensitas adalah metode paling sederhana untuk
mendapatkan ketelitian pengukuran yang tinggi (Huimin dkk, 2007; Yasin, 2010)
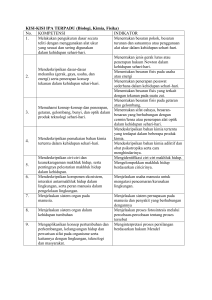
Ketiga metode penggunaan serat optik sebagai sensor di atas memiliki kelebihan dan
kekurangan masing-masing sesuai Tabel 1.1
1
2
Tabel 1.1 : Kelebihan dan kekurangan metode penggunaan serat optik sebagai sensor
(Yasin, 2010)
No
1.
2.
3.
Metode
Kelebihan
Kekurangan
Sensor
- Beda fase dapat diukur sangat - Pirantinya kompleks dan mahal
berbasis
peka
- Ketelitian dan stabiltasnya
modulasi fase - Stabilitas
dan
resolusi
bergantung panjang gelombang
interferometrinya tinggi
yang digunakan
Sensor
Ketelitian tinggi sampai sub- - Memerlukan peralatan khusus
berbasis
nanometer
dan mahal, seperti OSA
modulasi
(optical spectrum analizer)
panjang
- Kecepatan pengukuan dibatasi
gelombang
kecepatan penalaan laser
- Masih memerlukan manipulasi
dan pengukuran lanjutan
Sensor
- Metode sederhana
Terdapat fluktuasi intensitas
berbasis
- Ketelitian pengukuran tinggi
sehingga sulit digunakan pada
modulasi
- Pengukuran non kontak, kabel orde sangat kecil sub-nanometer
intensitas
interferensi elektromagnetik.
- Tangapan frekuensi lebar
- Biaya murah dan ukuran kecil
Fiber optik merupakan serat yang dibuat dari sebuah kaca murni yang panjang seperti
rambut manusia. Fiber optik mampu mentransmisikan data melalui cahaya yang
melewatinya. Seberkas cahaya akan digunakan untuk membawa informasi yang ingin
dikirim. Cahaya pembawa informasi tersebut akan ditembakan kedalam media fiber optik
dari tempat asalnya. Kemudian cahaya akan merambat sepanjang fiber optik hingga akhirnya
cahaya akan sampai tujuan. Ketika cahaya sampai ditujuan maka pengiriman data dan
informasi telah berhasil dikirim. Banyak besaran fisis yang dapat dideteksi menggunakan
serat optik secara optis seperti intensitas cahaya, pergeseran (posisi), tekanan, suhu,
perputaran suara, regangan (strain), medan listrik, medan magnetik, radiasi, ketinggian cairan
dan aliran. Secara umum aplikasi serat optik banyak dimanfaatkan berbagai bidang industri,
militer, geofisika dan medis.
Sensor pergeseran serat optik memiliki banyak keuntungan dalam pemanfaatannya
dibanding dengan sensor konvesional yang lain (Korn, 2014; Buchade and Shaligram, 2006;
Yasin, 2010) seperti : non-elektrik, non-kontak, tahan lama, dapat dikendalikan pada jarak
jauh, ukuran kecil, ringan, mudah diakses, mudah diinstal, tahan terhadap interferensi
gelombang radio dan elektromagnetik, ketelitian tinggi, transmisi datanya aman dan tahan
terhadap radiasi ionisasi. Dalam eksperimen berbagai bidang ilmu pengetahuan sering
dibutuhkan sebuah neraca yang sangat sensitif. Pada bidang kimia misalnya, untuk mengukur
3
massa sebuah serbuk zat kimia dibutuhkan sebuah neraca yang bisa mengukur massa berskala
miligram. Bidang ilmu farmasi juga demikian, untuk membuat sebuah ramuan obat yang
membutuhkan bahan bermacam-macam dengan massa yang relatif kecil membutuhkan
neraca sebagai pengukur massa yang sangat sensitif, dan masih banyak lagi ilmu lain yang
juga memerlukan neraca pengukuran massa kecil dalam pengembangan eksperimennya.
Serat optik banyak digunakan sebagai sensor ataupun tranduser dalam bidang
pengukuran dan pengendalian, hal ini dikarenakan adanya beberapa keunggulan yang
dimiliki serat optik untuk situasi atau kondisi tertentu, dimana sensor atau tranduser lain tidak
memungkinkan untuk digunakan. Misalnya pada lingkungan yang korosif dimana sensor
berbahan logam sangat rentan terjadi ledakan akibat loncatan elektron seperti pada kawasan
pertambangan gas alam, serat optik akan sangat aman digunakan karena melewatkan sinyal
berupa cahaya yang tidak memicu ledakan yang seperti terjadi pada sinyal listrik (Miclos dan
Zisu, 2001). Selain itu serat optik juga memiliki kelebihan antara lain : 1. berukuran kecil,
ringan, pasif, dan aman terhadap gangguan gelombang elektromagnetik, 2. mempunyai
sensitivitas yang tinggi, 3.bandwidth yang besar, dan 4. aman terhadap lingkungan dan tidak
memerlukan biaya yang tinggi untuk perawatan (Spillman dan Udd, 2014).
Perkembangan teknologi sekarang sebuah laser pointer biasanya dipakai untuk
presentasi bisa menjadi neraca dengan menghubungkan fiber optik dan foto detektor sebagai
sensor pergerserannya. Sinar laser pointer ditembakkan pada fiber optik kemudian
dirambatkan hingga mengenai objek dan dipantulkan kembali ke fiber optik penerima, dari
pantulan sinar ini diterima oleh foto-detektor untuk dikonversi ke sinyal listrik, sehingga
keluarannya berupa tegangan luaran dari foto-detektor. Prinsip sensor pergeseran fiber optik
dapat dimanfaatkan untuk membuat sebuah neraca pengukur massa kecil.
Kemajuan teknologi ini sejalan dengan
perkembangan peralatan-peralatan yang
dulunya bekerja secara analog mulai dikembangkan dengan teknik digital, dan bahkan yang
bekerja secara manual mulai banyak dikembangkan secara otomatis, seperti halnya komputer
digital, kamera digital, handycam dan sebagainya. Demikian halnya untuk pembacaan
pengukuran juga sudah dikembangkan teknik digital, dengan adanya jam digital, multimeter
digital, termometer digital, dan lain-lainnya. Hal ini memudahkan adanya pembacaan data
dan meminimalkan kesalahan pembacaan data yang disebabkan adanya human error.
Berkembangnya sistem otomatisasi ini tak jauh dari bermunculannya chip kontroler yang
banyak beredar di pasaran.
4
Dari beberapa penjelasan di atas bahwa fungsi serat optik sebagai transmisi cahaya
yang merupakan fungsi intensitas dan sangat ditentukan pergeseran objek. Salah satu
kompenen elektronik yang bekerja berdasarkan intensitas adalah LDR (light dependent
resistor) biasa disebut juga sensor cahaya. Karena baik serat optik maupun LDR sama-sama
berkaitan langsung dengan intensitas cahaya karena itu sangat penting untuk mengkaji
keterkaitannya secara mendalam. Selain itu pula LDR ini dalam kehidupan sehari-hari mudah
didapat dengan harga yang terjangkau.
Berdasarkan uraian diatas peneliti merasa perlu dilakukannya kajian “Rancang
bangun sensor pergeseran berbasis LDR”.
1.2. Rumusan Masalah
Berdasarkan latarbelakang permasalahan yang diuraikan diatas, maka permasalahan
pada penelitian ini dirumuskan sebagai berikut:
1.
Bagaimanakah pengaruh pergeseran cermin terhadap intensitas berkas cahaya luaran
serat optik penerima yang dideteksi oleh LDR dengan menggunakan laser pointer hijau
sebagai sumber cahaya?
2.
Bagaimanakah desain sensor pergeseran berbasis LDR menggunakan Mikrokontroler
Atmega16?
3.
Bagaimana kinerja sensor pergeseran keluaran berupa data digital?
1.3. Batasan Masalah
Pada penelitian ini permasalahan dibatasi pada:
1.
Penelitian ini mencakupi pada desain sensor pergeseran berbasis LDR dengan keluaran
pergeseran dalam bentuk data digital.
2.
Mengukur tegangan luaran LDR untuk menentukan kinerja sensor, yaitu sensitivitas,
linearitas, daerah linear dan jangkauan dinamis.
5
1.4. Tujuan Penelitian
Tujuan dari penelitian ini adalah:
1.
Mengetahui pengaruh pergeseran cermin terhadap intensitas berkas cahaya luaran serat
optik penerima yang dideteksi oleh LDR dengan menggunakan laser pointer warna
hijau sebagai sumber cahaya.
2.
Membuat desain sensor pergeseran berbasis LDR menggunakan Mikrokontroler
Atmega16.
3.
Mengetahui kinerja sensor pergeseran berbasis LDR.
1.5. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini yaitu:
1.
Diperolehnya sensor pergeseran berbasis LDR.
2.
Diketahui kinerja sensor pergeseran berbasis LDR menggunakan laser warna pointer
hijau dan Atmega16.
BAB II
TINJAUAN PUSTAKA
Pembuatan alat pengukuran massa menggunakan sensor pergeseran telah dilakukan
oleh Golnabi, (2001). Rancangan dan operasi ini menggunakan sepasang serat optik dan
lensa yang dilapisi cermin. Intensitas cahaya modulasi didasarkan pada gerak relatif lensa
karena menambahkan massa yang direspon oleh serat optik. Intensitas yang dimodulasi
akibat pemberian massa telah diukur menggunakan voltmeter digital. Hasil pengukuran
massa diperoleh sensitivitas sekitar 11,5 mV/g untuk rentang dinamis 80 g. Kurva hasil
percobaan antara perubahan massa yang mengakibatkan perubahan tegangan ini terdiri dua
bagian yaitu slope depan yang peka terhadap massa yang kecil dan slope belakang yang peka
terhadap penambahan massa yang lebih besar. Kepekaan dan hasil keseluruhan kinerja dapat
ditingkatkan dengan mempertimbangkan sumber radiasi LED merah. Penggunaan daya
yang tinggi pada LED dengan panjang gelombang yang sesuai dengan responsivitas tertinggi
dari detektor akan sangat meningkat kepekaan sensor.
Yasin et al. (2007) telah melakukan penelitian tentang sensor pergeseran fiber optik
dengan sumber cahaya laser tanpa choper dan probe serat bundel jenis konsentris yang
memiliki serat penerima berjumlah 16, menghasilkan tegangan keluaran fotodetektor
terhadap gerakan aksial cermin datar yang diukur menggunakan voltmeter digital dan
pergeseran objek dilakukan dilakukan dengan mikrometer translation stage dengan step
pergeseran 50 m/step. Probe serat optik yang digunakan terdiri serat pemancar dan 16 buah
serat penerima dalam susunan kosentris dengan serat pemancar di tengah yang dikelilingi 16
buah serat penerima. Dalam eksperimen ini daerah linier slope depan memiliki kepekaan
yang lebih tinggi dibandingkan dengan slope belakang dan daerah slope depan sangat cocok
untuk mengukur pergeseran obyek jarak dekat (close distance) sedangkan slope belakang
cocok untuk pergeseran obyek jarak yang jauh (long distance).
Penelitian selanjutnya yang dilakukan oleh Yasin et al. (2009) adalah sensor pergeseran
serat optik dengan sumber cahaya laser He-Ne merah (633 nm) tanpa choper dan probe serat
bundel jenis pasangan, konsentris dengan jumlah serat penerima 9 dan konsentris dengan
jumlah serat penerima 16 diperoleh tegangan keluaran foto-detektor maksimum berturutturut 64,3mV pada jarak 1750 m dan 101,1mV pada jarak 750 m dan 134,7mV pada jarak
850 m. Sensor pergeseran optik dengan sumber cahaya laser warna hijau (543nm) tanpa
6
7
choper dan probe serat bundel jenis pasanagan, jenis konsentris dengan serat penerima
berjumlah 9 dan jenis konsentris dengan serat penerima 16 menghasilkan tegangan luaran
maksimum 61,8mV pada jarak 1800 m, 92,4mV pada jarak 750 m, dan 128,3mV pada
jarak 750 m. Perbandingan kinerja antara sensor pergeseran serat optik antara sumber
cahaya laser merah dan hijau dengan probe fiber optik jenis konsentris dengan serat penerima
16 menunjukan bahwa sensor lebih peka menggunakan laser He-Ne merah dibandingkan
dengan laser hijau, hal ini disebabkan karena respon panjang gelombang detektor silikon
lebih peka terhadap warna merah dibanding warna hijau serta kualitas berkas cahaya laser
merah yang lebih baik.
Simamora, (2009) telah merancang sebuah neraca sederhana dengan sensor pergeseran
berbasis serat optik yang didasarkan pada pengamatan perubahan daya intensitas cahaya yang
diakibatkan oleh pergeseran obyek terhadap probe serat optik. Hasil eksperimen tersebut
menghasilkan tegangan luaran yang bersifat linier terhadap perubahan massa, dan juga
memiliki kepekaan yang sangat tinggi.
Purwantiningsih, (2010) telah melakukan penelitian neraca berbasisi sensor pergeseran
fiber optik menggunakan laser warna hijau. Hasilnya neraca dengan sistem sensor pergeseran
fiber optik kosentris dengan menggunakan sumber cahaya laser pointer memiliki kepekaan
maksimum 0,0327 mV/mg dan jangkauan dinamis 300mg.
Utomo, (2014) telah melakukan penelitian perancangan instrumentasi pengukuran
panjang dan berat badan bayi berbasis atmega16. Alat yang dihasilkan memiliki tingkat
ketelitian baik jika dibandingkan dengan pengukuran analog, terutama bila dibandingkan
dengan meteran badan dan timbangan badan analog.
BAB III
LANDASAN TEORI
3.1. Laser
Laser merupakan singkata dari Light Amplification by Stimulated Emission of Radiation
yang berarti penguatan cahaya dengan emisi radiasi terstimulasi. Cahaya yang dihasilkan
memiliki sifat yaitu kesearahan, intensitas yang tinggi, tingkat koherensinya yang tinggi, dan
monokromatis, hal ini berbeda dengan sumber cahaya lain (Laud, 1988).Teori dasar stimulasi
secara teoritis dikemukakan oleh Albert Einitein pada tahun 1917 dan baru dapat dibuktikan
secara eksperimental oleh Theodore Maiman pada tahun 1960 dengan terwujudnya laser
dalam kristal Ruby. Ia mempostulatkan pancar imbas pada peristiwa radiasi agar dapat
menjelaskan kesetimbangan termal suatu gas yang sedang menyerap dan memancarkan
radiasi. Menurut dia ada 3 proses yang terlibat dalam kesetimbangan itu, yaitu : serapan,
emisi spontan (disebut flourensensi) dan emisi terstimulasi (lasing atau memancarkan laser).
Proses yang terakhir biasanya diabaikan terhadap yang lain karena pada keadaan normal
serapan dan pancaran spontan sangat dominan (Yudoyono dan Endarko, 2007).
Suatu sistem tingkat energi yang terkait dengan sistem atom ditinjau dua tingkat
misalnya 1 dan 2, jika atom diketahui berada status 2 pada t = 0, maka terdapat kemungkinan
tertentu per satuan waktu melakukan transisi ke status 1, sambil memancarkan foton dengan
energi hv = E2 – E1, dengan h adalah konstanta Plank dengan besar 6,626 x 10-34 Js. Proses
ini terjadi tanpa pengaruh medan luar sehingga disebut emisi spontan. Sebuah atom pada
keadaan dasar dapat dieksitasi ke keadaan tingkat energi yang lebih tinggi dengan cara
menembakan elektron atau foton. Setelah beberapa saat berada pada tingkat tereksitasi ia
secara acak akan segera kembali ke tingkat energi yang lebih rendah, dan tidak harus ke
keadaan dasar semula. Proses acak ini dikenal flouresensi terjadi dalam selang waktu rerata
yang disebut umur rerata, lamanya tergantung pada keadaan dan jenis atom tersebut.
Kebalikan dari umur ini dapat dipakai sebagai ukuran kebolehjadian atom tersebut
tereksitasi sambil memancarkan foton yang energinya sama dengan selisih tingkat energi asal
dan tujuan. Foton ini dapat saja diserap kembali oleh atom yang lain sehingga mengalami
eksitasi, tetapi dapat pula lolos keluar sistem sebagai cahaya. Sebetulnya atom-atom
tereksitasi tidak menunggu terlalu lama untuk memancarkan secara spontan, asalkan terdapat
foton yang menstimulasinya. Syaratnya foton ini harus memiliki energi yang sama dengan
selisih tingkat energi asal dan tujuan (Gambar 3.1). Tinjauan dua tingkat energi dalam sebuah
8
9
atom E1 dan E2, dengan E1< E2. Cacah atom yang berada di masing-masing tingkat
energi adalah N1 dan N2. Untuk menggambarkan distribusi energi pada atom-atom itu dalam
kesetimbangan termal berlaku statistik Maxwell– Boltzman:
(
)
(3.1)
Gambar 3.1 Tiga proses dasar yang terjadi antara dua keadaan energi dari
sebuah atom : (a) serapan, (b) radiasi spontan dan (c) radiasi
terangsang (Agrawal, 2002)
Laser bisa lasing hanya jika N2 > N1 yang tentu saja tidak alamiah, keadaan terbalik
seperti ini disebut inversi populasi. Cara-cara untuk mencapai keadaan inversi populasi antara
lain adalah pemompaan optis dan pemompaan elektris. Pemompaan optis adalah penembakan
foton, sedangkan pemompaan elektris adalah penembakan elektron melalui pelucutan listrik.
Untuk menuju keadaan inversi populasi pemompaan ini harus melakukan pemindahan atom
ke tingkat eksitasi dengan laju yang lebih cepat dibandingkan dengan laju pancaran
spontannya. Hal ini dapat dilakukan jika dipergunakan medium laser yang atom-atomnya
memiliki tingkat energi metastabil. Sebuah metastabil membutuhkan waktu yang relatif lama
sebelum tereksitasi dibandingkan umurnya di tingkat eksitasinya yang lain. Dengan demikian
pada saat pemompaan terus berlangsung, terjadilah kemacetan lalulintas di tingkat metastabil
ini, populasinya akan lebih padat dibandingkan dengan populasi tingkat energi dibawanya.
Populasi tingkat energi dasar kini sudah terlampaui populasi tingkat metastabilnya. Bila
suatu saat secara spontan dipancarkan satu foton saja yang berenergi sama dengan selisih
energi antara tingkat metastabil dengan tingkat dasar, ia akan memicu dan mengajak atomatom lain di tingkat metastabil untuk kembali ke tingkat dasar. Akibatnya atom-atom itu
melepaskan foton-foton yang energi fasenya persis sama dengan foton yang mengajaknya
tadi, hal inilah menyebabkan terjadinya laser.
10
3.2. Konsep Dasar Serat Optik
3.4.1 Serat Optik
Serat optik adalah saluran transmisi yang terbuat dari kaca atau plastik yang digunakan
untuk mentransmisikan sinyal cahaya dari suatu tempat ke tempat lain. Cahaya yang ada
dalam serat optik sulit keluar karena indeks bias kaca lebih besar dari pada indeks bias udara.
Sumber cahaya yang digunakan adalah laser, karena laser mempunyai spektrum yang sangat
sempit. Kecepatan transmisi serat optik sangat tinggi sehingga sangat bagus digunakan
sebagai saluran komunikasi. Serat optik umumnya digunakan dalam sistem telekomunikasi
serta dalam pencahayaan, sensor, dan optik pencitraan. Serat optik terdiri dari dua bagian
yaitu, bagian cladding dan core (Gambar 3.2). Cladding adalah selubung dari core, sehingga
akan memantulkan kembali cahaya yang mengarah keluar dari core kembali kedalam core
lagi. Efesiensi dari serat optik ditentukan oleh kemurnian dari bahan penyusun gelas.
Semakin murni bahan gelas, semakin sedikit cahaya yang diserap oleh serat optik.
Gambar 3.2 Bentuk penampang dan lintasan cahaya dalam serat optik
(The’venaz, 2011)
Berdasarkan mode yang dirambat, fiber optik dikelompokkan menjadi dua yaitu:
a.
Single mode: serat optik dengan core yang sangat kecil, diameter mendekati panjang
gelombang sehingga cahaya yang masuk ke dalamnya tidak terpantul-pantul ke dinding
cladding (Gambar 3.3).
core
Gambar 3.3 Serat optik single mode
cladding
11
b.
Multi mode: serat optik dengan diameter core yang agak besar yang membuat laser di
dalamnya terpantul-pantul di dinding cladding yang dapat menyebabkan berkurangnya
bandwith dari serat optik jenis ini (Gambar 3.4).
Gambar 3.4 Serat optik multi mode
Berdasarkan index bias core, fiber optik dikelompokkan menjadi dua yaitu:
a.
Step index: pada serat optik step index, core memiliki indeks bias homogen.
b.
Graded index: indeks bias core semakin mendekati ke arah cladding semakin kecil. Jadi
pada graded index, pusat core memiliki indeks bias yang paling besar. Serat graded
index memungkinkan untuk membawa bandwith yang lebih besar, karena pelebaran
pulsa yang terjadi dapat diminimalkan.
Reliabilitas serat optik dapat ditentukan dengan satuan BER (Bit Error Rate). Salah
satu ujung serat optik dapat diberi masukan data tertentu dan ujung yang lain mengolah data
itu. Dengan intensitas laser yang rendah dan dengan panjang serat mencapai beberapa
kilometer, maka akan menghasilkan kesalahan. Jumlah kesalahan persatuan waktu tersebut
dinamakan BER. Dengan diketahuinya BER maka jumlah kesalahan pada serat optik yang
sama dengan jarak berbeda dapat diperkirakan besar.
3.4.2 Gelombang Cahaya
Transmisi data atau informasi melalui cahaya akan merambat melalui kabel fiber optik
sejauh kekuatan cahaya tersebut ditembakan dari asalnya. Prinsip pemantulan dan pembiasan
inilah yang dipakai dalam menghantarkan cahaya ke tujuan dengan menggunakan fiber optik.
Cahaya dalam vakum memiliki kecepatan sebesar 299.792.458 m/s atau sebesar 3.108m/s.
Ketika cahaya merambat melewati dua medium dengan kerapatan atau indeks bias berbeda
akan terjadi pembiasan. Pembiasan cahaya adalah peristiwa penyimpangan atau pembelokan
cahaya karena melalui dua medium yang berbeda kerapatan optiknya.
12
Arah pembiasan cahaya dibedakan menjadi dua macam yaitu pertama,
cahaya
dibiaskan mendekat garis normal jika cahaya merambat dari medium optik kurang rapat ke
medium optik lebih rapat, contohnya cahaya merambat dari udara ke dalam air. Kedua,
menjauhi garis normal jika cahaya merambat dari medium lebih rapat ke medium yang
kurang rapat, contohnya cahaya merambat dari dalam air ke udara. Syarat-syarat terjadinya
pembiasan yaitu pertama, cahaya melalui dua medium yang berbeda kerapatan optiknya.
Kedua, cahaya datang tidak tegak lurus terhadap bidang batas (sudut datang lebih kecil dari
900). Pembiasan cahaya dapat terjadi dikarenakan perbedaan laju cahaya pada kedua medium.
Laju cahaya pada medium lebih rapat lebih kecil dibandingkan dengan laju cahaya pada
medium yang kurang rapat. Menurut Christian Huygens pada tahun 1629 – 1695:
“Perbandingan laju cahaya dalam ruang hampa dengan laju cahaya dalam suatu zat disebut
indeks bias”.
Secara matematis dirumuskan:
(3.2)
dengan
= indeks bias, c = laju cahaya dalam ruang hampa (3 x 108m/s) dan
dalam zat. Indeks bias tidak pernah lebih kecil dari 1 (artinya
= laju cahaya
1).
Menurut hukum Snellius yaitu: “Bila berkas cahaya dari medium yang lebih rapat ke
medium kurang rapat maka cahaya tersebut akan dibiaskan menjauhi garis normal”.
Secara matematis dirumuskan :
=
=
(3.3)
=
= arcsin( )
n1 n2
n1 n2
(3.4)
n1 n2
2
n2
n1
1
C
1
r
Gambar 3.5 Tiga bentuk perambatan cahaya (Purwatiningsih, 2010)
13
dengan
bias,
= indeks bias medium 1,
= sudut kritis,
= indeks bias medium 2,
= sudat datang,
= sudut
= sudut pantul.
Sudut datang yang menyebabkan sinar bias berimpit dengan dengan bidang batas kedua
medium disebut sudut kritis. Jika sudut kritis lebih kecil dari sudut datang maka akan terjadi
pemantulan internal total Gambar 3.5.
Persyaratanya agar cahaya dapat merambat di dalam serat optik adalah indeks bias inti
harus lebih besar dari pada indeks bias cladding dan sudut datang sinar harus lebih besar dari
pada sudut kritis. Dalam perambatan cahaya di dalam serat optik semua cahaya yang datang
mengalami pemantulan total. Prinsip perambatan cahaya dalam serat optik, terdapat tiga
kemungkinan yaitu: sinar merambat lurus sepanjang sumbu serat tanpa mengalami gangguan,
sinar mengalami refleksi karena memiliki sudut datang yang lebih besar dari sudut kritis
sehingga akan merambat sepanjang serat melalui pantulan-pantulan dan terakhir sinar akan
mengalami refraksi dan tidak akan dirambatkan sepanjang serat karena memiliki sudut datang
yang lebih kecil dari sudut kritis Gambar 3.6. Numerical Apperature (NA) adalah suatu
ukuran atau besaran sudut yang dibentuk dari berkas cahaya yang dipancarkan oleh sumber
optik ke serat optik sehingga cahaya tersebut merambat tanpa mengalami gangguan yaitu:
√
dengan :
= indeks bias core dan
(3.5)
= indeks bias cladding.
nCladd
nCore
Cladding
Core
light
Gambar 3.6 Lintasan cahaya dalam serat optik
Cahaya dapat merambat dalam serat optik melalui sejumlah lintasan yang berbeda-beda yang
disebut mode dari suatu serat optik. Jumlah mode yang ada dalam suatu serat optik
ditentukan oleh ukuran diameter core, besarnya sudut datang dan indeks bias.
Serat optik yang memiliki lebih dari satu mode disebut serat optik multimode, sedangkan
serat optik yang memiliki satu mode disebut serat single mode yang memiliki core lebih kecil
Gambar 3.7.
14
Gambar 3.7 Lintasan cahaya dalam serat optik :(a) step index multimode,(b) graded
index multimode, (c) step index single mode (Thyagarajan dan Ghatak, 2007)
3.3. Prinsip Kerja Sensor Pergeseran Serat Optik
Pembuatan sensor ini merupakan salah satu aplikasi dari serat optik yaitu sebagai
komponen sensor pergeseran suatu obyek. Obyek yang dipakai adalah obyek yang berupa
bidang datar (cermin datar) dan dapat memantulkan berkas cahaya, sedangkan serat optik
yang dipakai adalah serat optik jenis step-index multimode. Cara kerja sensor serat bundel
pasangan adalah berkas sumber cahaya akan ditransmisikan di sepanjang
teras serat
pemancar ke permukaan sasaran. Cahaya ini kemudian dipantulkan oleh sasaran dan masuk
ke teras serat penerima, yang kemudian dideteksi oleh LDR (light dependent resistor).
Dengan membandingkan intensitas cahaya terpantul yang diukur oleh LDR dengan sumber
cahaya yang telah diketahui intensitasnya, pergeseran permukaan sasaran dari ujung probe
serat optik pasangan akan dapat ditentukan.
Analisis karateristik pergeseran serat optik bundel dengan susunan berbentuk pasangan
(pair) secara teoritis, susunan ujung bundel serat di depan cermin dimodelkan sebagai
susunan 2 serat optik sejajar yang saling bebas dan diasumsikan tidak ada ruang kosong
diantara serat optik tersebut. Kedua serat optik pemancar dan penerima diangap mempunyai
bentuk panampang lingkaran sempurna dengan jari-jari
, Gambar 3.8.
15
wa
Transmitting bundle
2wa
wa
Receiving bundle
Front view
Side view
Gambar 3.8 Tampak depan dan samping ujung serat optik bundel pemancar dan
penerima (Yasin, 2010)
Pantulan berkas cahaya dari permukaan sasaran dapat dijelaskan atas konsep geometri
perambatan cahaya, Gambar 3.9 . Berkas cahaya meninggalkan serat pemancar diwakili oleh
kerucut simetris dengan setengah sudut sebaran
dan pusat di titik O pada jarak Za di dalam
serat bundel.
z
Serat penerima
bayangan
h
Q’
M
y
a
h
Q
Za
O
Serat pemancar
Serat penerima
Gambar 3.9 Berkas kerucut cahaya yang keluar dari serat optik pemancar fiber optik
pasangan. (Yasin, 2010)
16
Untuk menganalisa banyak cahaya yang terkumpulkan di serat penerima maka kerucut
di depan cermin diperluas. Sumbu kerucut yang mulai dipancarkan dari titik O dan diperluas
di depan cermin M adalah sumbu z. Koordinat titik pusat pada serat penerima ditandai
dengan Q’, yang dapat ditulis:
{
(3.6)
Pendekatan berkas Gaussian dalam model ini digunakan untuk menentukan profil tegangan
luaran sensor yang bergantung pada daya optis pada teras serat penerima. Pendekatan ini
menggambarkan bahwa berkas cahaya yang meninggalkan serat bundel diangap sebagai
berkas sejajar sumbu (paraxial) dengan profil Gaussian. Berkas cahaya yang dipancarkan
akan berkurang secara eksponensial diseluruh tampang lintang berkas radial menurut
persamaan 3.7 (Saleh dan Teich, 1991; Yasin, 2007):
(
)
(
( )
( )
)
(3.7)
Dengan PE adalah daya luaran serat pemancar, r dan z berturut-turut adalah koordinat radial
dan longitudinal,
( )
√
koordinat z. Hubungan konstanta
( )
adalah jari-jari berkas cahaya di sepanjang
(waist radius) dan ZR jarak Rayleigh:
=
(3.8)
Di daerah medan jauh (Z >> ZR) kerucut di karateristikan oleh sebuah sudut yang dinyatakan:
( )
(3.9)
Intensitas cahaya dapat disederhanakan menjadi:
(
)
(
)
(3.10)
Daya optis yang diterima oleh serat penerima dapat dihitung dengan mengintegralkan I(r,z)
di seluruh luas penampang ujung serat penerima yaitu:
( )
∫ (
)
(3.11)
Berkas I(r,z) saat melewati permukaan penerima diangap konstan dengan luas
dan besarnya sebanding dengan pusat serat penerima di titik Q’ dan r = 2wa
2 aza.
17
Sehingga daya optis ternormalisasi di serat penerima dapat dinyatakan oleh persamaan
matematis sebagai berikut:
(
Dimana
diperoleh
)
(3.12)
. Daya mencapai makmsimum jika
√ (hN = 0,9142) maka Pmaks =
. Bentuk normalisasinya adalah PN = P/Pmaks
dan dapat dituliskan bentuk normalisasinya sebagai berikut:
(
)
(3.13)
Kepekaan sensor pergeseran ini dapat dihitung dengan mendiferensialkan PN terhadap hN.
(3.14)
(
)
( )
(3.15)
Daya keluaran pada probe serat optik berbentuk kosentris dapat diturunkan dengan cara yang
sama seperti pada probe serat optik berbentuk pasangan diatas. Serat optik kosentris terdiri
dari satu buah serat pemancar yang berada dipusat dan dikelilingi 16 serat penerima, Gambar
3.10. Diameter untuk serat optik pemancar adalah 1mm, sedangkan serat optik penerima
0,25mm.
18
z
wb
wa
Receiving fiber (bayangan)
w
Bidang 3
Q’
Q’
h
M
y
a
Q
h
Bidang 2
Q
za
Bidang 1
Transmiting fiber
O
Gambar 3.10 Kerucut cahaya yang keluar dari serat pemancar. Kerucut diperpanjang
melewati cermin dan posisi bayangan serat penerima di titik Q dan Q’.
(Yasin, 2009)
z = za + 2h
(3.16)
dengan wa = 4wb dan h adalah jarak pergeseran objek pada mikro meter.
dapat dimasukan pada persamaan daya adalah :
,
Nilai-nilai
yang
,
diperoleh :
(
Dengan
)
(3.17)
1 + 2hN , selanjutnya kepekaan (sensitivity) sensor dapat diperoleh dengan
mendefenisikan PN terhadap hN yaitu :
(
)
( )
(3.18)
19
3.4. Mikrokontroler ATmega16
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol rangkaian
elektronik dan umumnya dapat menyimpan program di dalamnya dan sebuah sistem
komputer lengkap dalam satu serpih (chip). Mikrokontroler lebih dari sekedar sebuah
mikroprosesor karena sudah terdapat atau berisikan ROM (Read-Only Memory), RAM
(Read-Write Memory), beberapa port masukan maupun keluaran, dan beberapa peripheral
seperti pencacah/pewaktu, ADC (Analog to Digital converter), DAC (Digital to Analog
converter) dan serial komunikasi. Salah satu mikrokontroler yang banyak digunakan saat
ini yaitu mikrokontroler AVR. AVR adalah mikrokontroler RISC (Reduce Instuction Set
Compute) 8 bit berdasarkan arsitektur Harvard. Secara umum mikrokontroler AVR dapat
dapat dikelompokkan menjadi 3 kelompok, yaitu keluarga AT90Sxx, ATmega dan ATtiny.
Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan
fiturnya seperti mikroprosesor pada umumnya, secara internal mikrokontroler ATMega16
terdiri atas unit-unit fungsionalnya Arithmetic and Logical Unit (ALU), himpunan
register kerja, register dan dekoder instruksi, dan pewaktu beserta komponen kendali
lainnya. Berbeda dengan mikroprosesor, mikrokontroler menyediakan memori dalam
serpih yang sama dengen prosesornya (in chip).
3.6.1 Arsitektur ATmega16
Mikrokontroler ini menggunakan arsitektur Harvard yang memisahkan memori
program dari memori data,
baik bus alamat maupun bus data,
sehingga pengaksesan
program dan data dapat dilakukan secara bersamaan (concurrent). Secara garis besar
mikrokontroler ATmega16 terdiri dari:
1.
Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16Mhz.
2.
Memiliki kapasitas Flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM
1Kbyte
3.
Saluran I/O 32 buah, yaitu Port A, Port B, Port C, dan Port D.
4.
CPU yang terdiri dari 32 buah register.
5.
User interupsi internal dan eksternal.
6.
Port antarmuka SPI dan Port USART sebagai komunikasi serial.
7.
Fitur Peripheral
Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode compare
20
Satu buah 16-bit timer/counter dengan prescaler terpisah, mode compare, dan
mode capture
Real time counter dengan osilator tersendiri
Empat kanal PWM dan Antarmuka komparator analog
8 kanal, 10 bit ADC
Byte-oriented Two-wire Serial Interface
Watchdog timer dengan osilator internal
3.6.2 Konfigurasi Pena (Pin) ATmega16
Konfigurasi pena (pin) mikrokontroler ATmega16 dengan kemasan 40-pena (pin)
dapat dilihat pada Gambar 3.11. Dari gambar tersebut dapat terlihat ATMega16
memiliki 8 pena untuk masing-masing Port A, Port B, Port C, dan Port D.
Gambar 3.11 Pin – pin ATmega16 (Anonim, 2010)
21
3.6.3 Port Sebagai Input/Output Digital
ATmega16 mempunyai empat buah port yang bernama PortA, PortB, PortC, dan
PortD. Keempat port tersebut merupakan jalur bidirectional dengan pilihan internal pull-up.
Tiap port mempunyai tiga
buah register bit, yaitu DDxn, PORTxn, dan PINxn.
Huruf ‘x’mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn
terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit
PINxn terdapat pada I/O address PINx. Bit DDxn dalam register DDRx (Data Direction
Register) menentukan arah pin. Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila
DDxn diset 0 maka Px berfungsi sebagai pin input.Bila PORTxn diset 1 pada saat pin
terkonfigurasi sebagai pin input, maka resistor pull-up akan diaktifkan. Untuk mematikan
resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output. Pin port
adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat pin terkonfigurasi
sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn diset 0 pada saat pin
terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat mengubah kondisi
port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high (DDxn=1,
PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled (DDxn=0,
PORTxn=1) atau kondisi output low (DDxn=1, PORTxn=0).
Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan
impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan
sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset
1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan
pull-up ke kondisi output low juga menimbulkan masalah yang sama. Kita harus
menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1,
PORTxn=0) sebagai kondisi transisi.
Tabel 3.1 Konfigurasi pin port
22
Timer
Timer/counter adalah fasilitas dari ATmega16 yang digunakan untuk perhitungan pewaktuan.
beberapa fasilitas chanel dari timer counter antara lain: counter channel tunggal,
pengosongan data timersesuai dengan data pembanding, bebas -glitch, tahap yang tepat Pulse
Width Modulation (PWM), pembangkit frekuensi, event counter external.
3.6.4 ADC (Analog To Digital Converter)
AVR ATMega16 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC
internal dengan resolusi 10 bit. Dalam mode operasinya, ADC dapat dikonfigurasi, baik
single ended input maupun differential input. Selain itu, ADC ATMega16 memiliki
konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter derau
(noise) yang amat fleksibel sehingga dapat dengan mudah disesuaikan dengan kebutuhan
dari ADC itu sendiri. ADC pada ATMega16 memiliki fitur-fitur antara lain:
Resolusi mencapai 10-bit
Akurasi mencapai ± 2 LSB
Waktu konversi 13-260µs
8 saluran ADC dapat digunakan secara bergantian
Jangkauan tegangan input ADC bernilai dari 0 hingga VCC
Disediakan 2,56V tegangan referensi internal ADC
Mode konversi kontinyu atau mode konversi tunggal
Interupsi ADC complete
Sleep Mode Noise canceler
Proses inisialisasi ADC meliputi proses penentuan clock, tegangan referensi, formal
data keluaran, dan modus pembacaan. Register-register yang perlu diatur adalah sebagai
berikut:
23
ADC Control and Status Register A – ADCSRA
Gambar 3.12 ADC control and status register A - SFIOR (Anonim, 2010)
ADEN
: 1 = adc enable, 0 = adc disable
ADCS
: 1 = mulai konversi, 0 = konversi belum terjadi
ADATE
: 1 = auto trigger diaktifkan, trigger berasal dari sinyal yang dipilih (set pada
trigger SFIOR bit ADTS). ADC akan start konversi pada edge positif sinyal
trigger.
ADIF
: diset ke 1, jika konversi ADC selesai dan data register ter-update.
Namun ADC Conversion Complete Interrupt dieksekusi jika bit ADIE dan bit-I dalam
register SREG diset.
ADIE
: diset 1, jika bit-I dalam register SREG di-set.
ADPS[0..2] : Bit pengatur clock ADC, faktor pembagi 0 … 7 = 2, 4, 8, 16, 32, 64, 128.
Tabel 3.2 Konfigurasi Clock ADC
ADC Multiplexer-ADMUX
24
Gambar 3.13 ADC Multiplexer-ADMUX (Anonim, 2010)
REFS 0, 1
: Pemilihan tegangan referensi ADC
00
: Vref = Aref
01
: vref = AVCC dengan eksternal capasitor pada AREF
10
: vref = internal 2.56 volt dengan eksternal kapasitor pada AREF
ADLAR
: Untuk setting format data hasil konversi ADC, default = 0.
Special Function IO Register-SFIOR
SFIOR merupakan register 8 bit pengatur sumber picu konversi ADC, apakah dari picu
eksternal atau dari picu internal, susunannya seperti yang terlihat pada gambar berikut:
Gambar 3.14 Special function IO register SFIOR (Anonim, 2010)
ADTS[0...2]
: Pemilihan trigger (pengatur picu) untuk konversi ADC, akan berfungsi jika
bit ADATE pada register ADCSRA bernilai 1. Konfi ADTS[0...2] dapat dilihat pada Tabel
2.2.
Tabel 3.3 Pemilihan sumber picu ADC (www.atmel.com/literature)
ADHSM : 1. ADC high speed mode enable.
ACME, PUD, PSR2 dan PSR10 tidak diaktifkan.
3.5. LDR
25
LDR(Light Dependent Resistor) adalah jenis resistor yang nilai hambatan atau nilai
resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai hambatan LDR akan
menurun pada saat cahaya terang dan nilai hambatannya akan menjadi tinggi jika dalam
kondisi gelap. Dengan kata lain, fungsi LDR adalah untuk menghantarkan arus listrik jika
menerima sejumlah intensitas cahaya (kondisi terang) dan menghambat arus listrik dalam
kondisi gelap. Biasanya komponen LDR dibuat berdasarkan kenyataan bahwa film kadmium
sulfida mempunyai tahanan/hambatan yang besar kalau tidak terkena sinar dan tahanannya
menurun kalau permukaan film itu terkena sinar, Gambar 3.15. (Woollard, 2006)
Naik turunnya nilai hambatan akan sebanding dengan jumlah cahaya yang diterimanya.
Pada umumnya, nilai hambatan LDR akan mencapai 200 kilo Ohm (kΩ) pada kondisi gelap
dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang. LDR yang merupakan
komponen elektronika yang peka cahaya ini sering digunakan atau diaplikasikan dalam
rangkaian elektronika sebagai sensor pada lampu penerang jalan, lampu kamar tidur,
rangkaian anti maling, shutter kamera, alarm dan lain sebagainya.
hv
i
Gambar 3.15 Bentuk dan simbol LDR
Alat ukur yang digunakan untuk mengukur nilai hambatan LDR adalah multimeter
dengan fungsi pengukuran Ohm (Ω). Agar pengukuran LDR akurat, kita perlu membuat 2
kondisi pencahayaan yaitu pengukuran pada saat kondisi gelap dan kondisi terang. Dengan
demikian kita dapat mengetahui apakah komponen LDR tersebut masih dapat berfungsi
dengan baik atau tidak. Hasil pengukuran akan berubah tergantung pada tingkat intesitas
cahaya yang diterima oleh LDR itu sendiri. Satuan terang cahaya atau Iluminasi
(Illumination) adalah lux. Sebutan lain untuk LDR adalah photo resistor, photo conduction
ataupun photocell.
BAB IV
METODOLOGI PENELITIAN
4.1. Rancangan sistem
Pada penelitian ini dilakukan dengan beberapa tahapan yaitu setup dan perancangan
alat kemudian dilakukan karakterisasi sensor cahaya (LDR) yang akan digunakan. Tahap
berikutnya adalah perancangan dan pembuatan rangkaian sistem sensor pergeseran yang akan
dihubungkan dengan rangkaian mikrokontroler atmega16. Setelah rangkaian sistem
pengambilan data siap digunakan, maka tahap selanjutnya adalah pembuatan program yaitu
pemograman pada mikrokontroler untuk digitalisasi data yang ditampilkan pada LCD,
terakhir pengolahan data.
4.2. Alat dan Bahan Penelitian
Alat dan bahan yang digunakan dalam eksperimen ini adalah sebagai berikut :
a. Sumber cahaya laser
Sumber cahaya laser yang digunakan green pointer laser (
nm). Foto sumber
cahaya green pointer laser Gambar 4.1. Spesifikasi sumber cahaya green pointer laser
memiliki beam divergence 1,7 mrad, beam diameter 1,1 mm dan output voltage 1,6mV.
Gambar 4.1 Foto sumber cahaya green pointer laser
26
27
b. Serat optik/Fiber optik
Jenis probe serat optik bundel plastik multimode step-index yang digunakan adalah
probe serat optik dengan ujung bundel yang tersusun pasangan. Susunan pasangan serat
pemancar dan penerima tersusun bersebelahan dan sejajar.
Semua jenis probe serat optik plastik bundel yang digunakan adalah buatan Autonics.
Corp. Seoul-Korea. Spesifikasi pada Tabel 4.1 dan gambar probe serat optik bundel
Gambar 4.2.
Tabel 4.1 Jenis probe serat optik bundel plastik multimode step-index yang digunakan
dalam eksperimen
Jenis probe
Pasangan
Jumlah serat Diameter serat Diameter serat Susunan serat dalam
penerima
pemancar
penerima
bundel
1
1.00mm
1.00mm
Pasangan/pair
Gambar 4.2 Foto serat optik bundel
28
c. Cermin Datar
Objek yang digunakan dalam eksperimen ini adalah cermin datar yang bekerja pada
daerah cahaya tampak (visible mirror).
d. Mikrometer Sekrup
Mikrometer sekrup digunakan untuk mengerak objek (cermin datar). Ketelitian
mikrometer 0,1mm. Foto mikrometer yang dipakai dalam eksperimen ini Gambar 4.3
Penjepit serat optik
Serat optik
Mikrometer sekrup
Cermin datar
Gambar 4.3 Foto mikrometer sekrup, serat optik, cermin datar, penjepit serat
optik
e. LDR
LDR sensor cahaya yang perubahan resistansinya tergantung intensitas cahaya. Dalam
eksperimen ini perubahan resitansi LDR akibat perubahan intensitas menjadi masukan
dan luaran dalam bentuk tegangan Gambar 4.4
Gambar 4.4 foto LDR
29
f. Multimeter
Multi meter yang digunakan adalah Heles multimeter digital UX 35 TR dengan
spesifikasi seperti tabel 4.2. dan gambar 4.5. Multimeter digunakan untuk mengukur
tegangan luaran LDR.
Tabel 4.2 Spesifikasi Heles multimeter digital UX 35 TR
Accuracy (1YR) 18 to 280C
No
Range
1
DC Voltage
Maximum allowable input 1000V DC
Normal mode rejection ratio greater than 46dB at 50Hz 60Hz (1k unbalance)
200mV
2000mV
20V
200V
1000V
2
±0,25% of rdg ± 2D
±0,5% of rdg ± 2D
±0,5% of rdg ± 2D
±0,5% of rdg ± 2D
±0,5% of rdg ± 2D
100 µA
1 µA
10 µA
100 µA
10mA
±1% of rdg ± 2D
±1% of rdg ± 2D
±1% of rdg ± 2D
±1% of rdg ± 2D
±1% of rdg ± 2D
AC Voltage
Frequency range 45Hz – 450Hz
Maximum allowable input : 750 V rms
200V
750V
4
100µV
1V
10mV
100mV
10V
DC Current
Maximum Full scale voltage drop 0,25V
Overload protection : mA input, 2A 250V Fuse
200µA
2000µA
20mA
200mA
10A
3
Resolution
100mV
1V
±1,2% of rdg ± 10D
±1,2% of rdg ± 10D
Resistance
Maximu open circuit voltage : 2,8V
200Ω
2000 Ω
20K
200K
2000K
100m ohm
1 ohm
10 ohm
100 ohm
1 K ohm
±0,8% of rdg ± 2D
±0,8% of rdg ± 2D
±0,8% of rdg ± 2D
±0,8% of rdg ± 2D
±1% of rdg ± 2D
30
Gambar 4.5 Foto Heles multimeter digital UX 35 TR
g. Atmega16
Atmega16 adalah suatu mikrokontroler digunakan untuk mengubah sinyal analog
menjadi digital. Sistem minimum atmega16 berfungsi sebagai pengendali utama untuk
mengendalikan system secara keseluruhan. Ketika perubahan resistansi berdasarkan
posisinya, maka masukan input dari ADC internal yang di miliki atmega16 juga berubah
yang menyebabkan perubahan nilai pergeseran yang ditampilkan LCD. Tampak fisik
atmega16 yang digunakan dalam penelitian ini Gambar 4.6
Atmega16
LCD
Gambar 4.6 Foto LCD dan Atmega16
31
h. LCD (Liquid Crystal Display)
LCD merupakan salah satu perangkat penampilan yang sekarang banyak digunakan.
LCD memanfaatkan silikon atau gelium dalam bentuk kristal cair sebagai pemendar
cahaya. Pada layar LCD, setiap matriknya adalah susunan dua dimensi piksel yang
dibagi dalam baris dan kolom. Keunggulan LCD adalah hanya menarik arus kecil
(beberapa mikro ampere), sehingga alat atau sistem menjadi portable karena dapat
menggunakan catu daya yang kecil (Setiawan, 2011). LCD yang digunakan adalah LCD
dengan contents : 1 x 16x2 alphanumeric display dan 1 x data booklet Gambar 4.6.
i. Komponen pendukung lainnya
Komponen pendukung lain agar penelitian berjalan dengan lancar adalah kabel listrik,
resistor dan laptop toshiba untuk menganalisa data dan menyimpan data yang diperoleh.
4.3. Proses Pelaksanaan Penelitian
Proses penelitian dilakukan dengan beberapa tahapan seperti pada Gambar 4.7 yaitu :
1.
Membuat rancangan alat seperti Gambar 4.8 dengan beberapa kompenen pokok
yaitu : laser pointer warna hijau sebagai sumber cahaya. Serat optik sebagai media
perambatan cahaya dari laser dan dipancarkan pada cermin datar dan oleh cermin
datar dipantulkan ke serat optik penerima yang diteruskan ke LDR. Mikrometer
sekrup untuk mengerakan sekaligus mengukur jarak setiap pergeseran cermin.
Cermin datar berfungsi untuk menghalang sinar yang dipancarkan oleh serat optik
pemancar lalu dipantulkan ke serat optik penerima. LDR berfungsi untuk
mendeteksi perubahan intensitas cahaya dari serat optik penerima. Mikrokontroler
Atmega16 berfungsi mengkonversi sinyal – sinyal analog dari LDR menjadi sinyal
digital sehingga tampilannya berupa data – data digital.
2.
Membuat sensor pergeseran dengan merangkai komponen – komponen sesuai
dengan Gambar 4.8. Pada tahap ini setiap kompenen dirangkai berdasarkan
fungsinya masing – masing sehingga bisa menghasilkan sensor pergeseran yang
sesuai dengan tujuan penelitian.
3.
Karakterisasi sensor cahaya (LDR) yaitu dengan melakukan pengukuran resistansi
LDR dengan multimeter digital pada saat cahaya terang dan saat gelap. Selanjutnya
menentukan kinerja LDR berdasarkan perubahan tegangan luarannya akibat
perubahan intensitas dari serat penerima.
32
4.
Pemograman mikrontroler yang bertujuan untuk mengubah sinyal – sinyal analog
luaran LDR dikonversi menjadi sinyal – sinyal digital sehingga menghasilkan
tampilan pada LCD berupa nilai pergeseran.
5.
Setelah sensor pergeseran berbasis LDR selesai dibuat dan pemograman
mikrokontroler bisa diaktifkan dengan baik maka tahap selanjutnya adalah
pengambilan data. Data – data berupa tegangan luaran LDR, nilai pergeseran yang
terukur pada mikrometer sekrup dan pergeseran teramati yang tampil pada LCD.
6.
Data – data yang diperoleh dan diolah dengan menggunakan microsoft office excel
2007 lalu dianalisa dengan menginterpretasi grafik yang ditampilkan pada microsoft
office excel 2007.
Mulai
Membuat rancangan sensor
pergeseran berbasis LDR
Pembuatan sensor pergeseran sesuai
dengan rancangan yang telah dibuat
Karakterisasi sensor cahaya (LDR)
Pemograman mikrokontroler untuk
mengubah sinyal analog menjadi sinyal
digital
Pengambilan data
Analisa data
Selesai
Gambar 4.7 Bagan proses pelaksanaan penelitian
33
4.4. Cara Kerja Rangkaian
Cara kerja rancangan sensor pergeseran Gambar 4.8 yaitu cahaya laser yang merambat
melalui serat optik pemancar ditransmisikan ke cermin datar
sehingga cahayanya
dipantulkan dan diterima oleh serat penerima. Posisi cermin datar selalu berubah atau digeser
menjauhi serat pemancar. Cermin digeser mulai dengan jarak nol dengan serat pemancar.
Pergeseran cermin ini menyebabkan intensitas cahaya yang diterima oleh serat penerima dan
dipancarkan pada LDR selalu berubah yang mengakibatkan resistansi LDR berubah pula
sehingga tegangan luaran LDR pun ikut berubah. Semakin kecil intensitas cahaya yang
dipancarkan, resistansi LDR-nya semakin besar. Perubahan tegangan ini menjadi sinyal –
sinyal listrik analog dan merupakan data – data masukan (input) bagi mikrokontroler yang
sudah terprogram dan mengubahnya menjadi data-data digital berupa nilai pergeseran dalam
satuan milimeter yang ditampilkan pada LCD.
Laser
LDR
Mikrokontroler
Serat optik
penerima
Serat optik
pemancar
mikro
meter
Cermin
Gambar 4.8 Rancangan sensor pergeseran berbasis LDR
Proses pemograman pada mikrokontroler dilakukan beberapa tahap, secara
keseluruhan ditunjukkan pada Gambar 4.9 yaitu dimulai dengan menjalankan alat lalu
dilakukan pengkondisian input (intensitas cahaya) yang akan diproses (inialisasi sistem) oleh
sensor cahaya (LDR). Sesaat terjadi pembacaan pada sensor cahaya makakan diproses
minimum oleh mikrokontroler, apakah ada perubahan intensitas cahaya. Jika terjadi
perubahan intensitas cahaya maka akan terjadi perubahan sinyal luaran LDR. Selanjutnya
sinyal – sinyal ini diterima dan diproses oleh mikrokontroler lalu ditampilkan pada layar
LCD yang berupa nilai pergeseran (pergeseran teramati). Jika tidak ada perubahan intensitas
cahaya (tidak ada perubahan sinyal) sistem dikondisikan pada posisi awal.
34
Mulai
Inialisasi Sistem
Tidak
Perubahan
Intensitas
Cahaya
Ya
Tampilan Data
Pergeseran (mm)
selesai
Gambar 4.9 Diagram alir pemograman


![contoh-soal salah [Compatibility Mode]](http://s1.studylibid.com/store/data/000637634_1-012acf88db1637bd7669bebbb4fe057a-300x300.png)