PEMBAHASAN ALJABAR LINEAR
Dosen Pembimbing :
Hartini, S.Pd., M.Pd.
Disusun Oleh ;
Noor Hasanah
Marhamah
: 2020.11.1003
: 2020.11.0977
STKIP PARIS BARANTAI KABUPATEN KOTABARU
PROGRAM STUDI PENDIDIKAN MATEMATIKA
TAHUN 2020/2021
A. PERTEMUAN 11
1. Kernel Transformasi Linear
DEFINISI TRANSFORMASI LINEAR
Jika V,W masing masing adalah ruang vektor, maka V,W masing – masing
merupakan himpunan. Dengan demikian dapat dibuat suatu fungsi antara V dan W .
Terkait dengan struktur dari V dan W , maka didefinisikan suatu operasi
penjumlahan vektor dan perkalian skalar. Definisi operasi tersebut, dapat berbeda.
Suatu fungsi dari ruang vektor ke ruang vektor yang mengawetkan ( preserve ) sifat
keterjumlahan dan perkalian skalarnya disebut transformasi linear.
Definisi 3.1. Diberikan V, dan W, masing-masing adalah ruang vektor. Suatu fungsi
T :V → W yaitu suatu fungsi dari V ke W disebut transformasi linear jika dipenuhi:
(i). 𝑢̅ , 𝑣̅ ∈ 𝑉 ; 𝑇(𝑢̅ + 𝑣̅ ) = 𝑇(𝑢̅) + 𝑇(𝑣̅ )
(ii). 𝑢̅ ∈ 𝑉 ; 𝛼 ∈ 𝑅 ; 𝑇(𝛼 × 𝑢̅) = 𝛼𝑇(𝑢̅)
SIFAT TRANSFORMASI LINEAR; KERNEL DAN JANGKAUAN
Dari defnisi transformasi linear sebelumnya, maka sifat-sifat transformasi yang
terangkum dalam teorema berikut dipenuhi untuk setiap transformasi linear.
Teorema 3.1. Jika T :V → W merupakan transformasi linear, maka untuk ∀ 𝑢̅ , 𝑣̅ ∈
𝑉 berlaku:
a. 𝑇(0̅) = 0
b. 𝑇(−𝑢̅) = −𝑇(𝑢̅)
c. 𝑇(𝑢̅ − 𝑣̅ ) = 𝑇(𝑢̅) − 𝑇(𝑣̅ )
Selanjutnya, masih terkait dengan transformasi linear. Transformasi linear
merupakan suatu fungsi, sehingga juga dikenal suatu image ( jangkauan ) dari
transformasi linear, maupun kernel yang didefinisikan sebagai berikut:
Definisi 3.2. Jika T :V → W merupakan transformasi linear, maka himpunan
𝑙𝑚(𝑇) = {𝑤|𝑤 = 𝑇(𝑣), 𝑣 ∈ 𝑉 }.
Yang merupakan himpunan bagian dari W, disebut Ruang Peta (Image) dari
transformasi linear T.
Sedangkan himpunan
𝐾𝑒𝑟(𝑇) = {𝑣|𝑣 ∈ 𝑉 , 𝑇(𝑣) = 0 }
Yang merupakan himpunan bagian dari V, disebut Ruang Nol (Kernel) dari
transformasi linear T.
Berdasarkan definisi tersebut, maka
𝐾𝑒𝑟(𝑇) = {𝑣|𝑣 ∈ 𝑉 , 𝑇(𝑣) = 0 }.
Himpunan ker(T) bukan merupakan himpunan kosong, sebab paling tidak
beranggotakan 0 ϵ V. Hal ini sesuai dengan sifat transformasi linear Teorema 3.1.a.
Selanjutnya jangkauan dari T dapat dinyatakan sebagai himpunan :
𝑅(𝑇)/ 𝑙𝑚(𝑇) = {𝑤|𝑤 = 𝑇(𝑣), 𝑣 ∈ 𝑉 }. Himpunan R(T) juga bukan merupakan
himpunan kosong, hal ini sesuai dengan Teorema 3.1.a, jadi paling tidak memuat 0 ϵ
W. Himpunan ker(T) merupakan himpunan bagian dari V , dan R(T) adalah
himpunan bagian dari W . Kedua himpunan ini merupakan sub ruang vektor, yang
selengkapnya diberikan pada Teorema berikut:
Teorema 3.2. Jika T :V → W merupakan transformasi linear, maka:
a. Himpunan ker(T) merupakan sub ruang vektor dari V
b. Himpunan R(T) merupakan sub ruang vektor dari W
Kedua himpunan tersebut membentuk sub ruang vektor, maka dengan sendirinya
himpunan-himpunan itu memenuhi seluruh aksioma untuk ruang vektor. Dengan
demikian keduanya merupakan ruang vektor, sehingga mempunyai dimensi.
Contoh 3.2
𝑎 𝑏
Dari Contoh 2.1, diketahui bahwa 𝑇: 𝑀2×2 → 𝑅 2 , dengan 𝑇 ([
]) = (2𝑎 +
𝑐 𝑑
𝑑 , 𝑏 − 2𝑐) merupakan transformasi linear. Selanjutnya, tentukan R(T) dan ker(T).
Jawab:
ker(𝑇) = 𝑇 ∈ 𝑀2×2 |𝑇(𝐴) = 0̅
𝑎
= {[
𝑐
𝑏
] |(2𝑎 + 𝑑 , 𝑏 − 2𝑐) = (0,0)}
𝑑
Dari kondisi tersebut, diperoleh : 2a + d = 0 atau d = -2a dan b – 2c = o
atau b = 2c . dengan demikian , diperoleh :
ker(𝑇) = {[
𝑎
𝑐
𝑎
𝑏
] |𝑑 = −2𝑎, 𝑏 = 2𝑐} = {[
𝑐
𝑑
Basis dari ker(T) adalah {[
𝑎
𝑅(𝑇) = {(𝑥, 𝑦) ∈ 𝑅 2 |𝑇 [
𝑐
1 0
0
],[
0 −2 1
2𝑐
] |𝑎, 𝑐 ∈ 𝑅}
−2𝑎
2
]} , dan dimensi dari ker(T) = 2
0
𝑏
𝑎
] = (𝑥, 𝑦), 𝑢𝑛𝑡𝑢𝑘 𝑠𝑢𝑎𝑡𝑢 [
𝑑
𝑐
𝑏
] ∈ 𝑀2×2 }
𝑑
= ((𝑥, 𝑦) ∈ 𝑅 2 |(2𝑎 + 𝑑, 𝑏 − 2𝑐) = (𝑥, 𝑦)
Jadi dari kondisi tersebut diperoleh𝑥 = 2𝑎 + 𝑑, 𝑦 = 𝑏 − 2𝑐. Dalam hal ini nilai
𝑎, 𝑏, 𝑐, 𝑑 ∈ 𝑅 bebas, dalam arti berlaku untuk semua nilai R . Dengan demikian nilai
x, y ada untuk nilai 𝑎, 𝑏, 𝑐, 𝑑 ∈ 𝑅 manapun. Sehingga 𝑅(𝑇) = 𝑅 2. Dimensi dari
R(T) = 2. Basisnya sama dengan basis untuk 𝑅 2 .
2. Matriks Baku Transformasi Linear
Transformasi linear dari 𝑅 𝑛 𝑘𝑒 𝑅 𝑚 merupakan transformasi matriks. Jika 𝑇 ∶ 𝑅 𝑛 →
𝑅 𝑚 adalah sebarang transformasi linear, maka ada matriks A berukuran m × n
sehingga T adalah perkalian oleh A.
Misalkan 𝑒1 , 𝑒2 , … . , 𝑒𝑛 adalah basis baku untuk 𝑅 𝑛 , dan misalkan A adalah matriks
m × n yang mempunyai 𝑇(𝑒1 ) , 𝑇( 𝑒2 ) , … . , 𝑇(𝑒𝑛 ) sebagai vektor-vektor kolomnya.
Matriks ini dinamakan matriks bentuk baku untuk T. akan ditunjukkan bahwa
tranformasi linear 𝑇 ∶ 𝑅 𝑛 → 𝑅 𝑚 adalah perkalian A.
Dengan membandingkan (2) dan (3) maka akan menghasilkan T(x) = Ax yakni T
adalah perkalian oleh A. sehingga dapat dirangkum dalam teorema :
Teorema
Jika 𝑇 ∶ 𝑅 𝑛 → 𝑅 𝑚 adalah transformasi linear dan jika 𝑒1 , 𝑒2 , … . , 𝑒𝑛 adalah basis
baku untuk 𝑅 𝑛 , maka T adalah perkalian oleh A, di mana A matriks yang
menghasilkan vektor kolom 𝑇(𝑒1 ) , 𝑇( 𝑒2 ) , … . , 𝑇(𝑒𝑛 ).
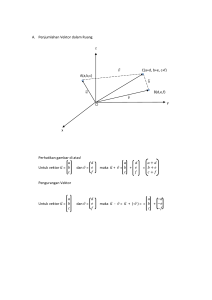
Terdapat lima jenis transformasi linier bidang yang mempunyai makna khusus:
perputaran (rotasi), refleksi, ekspansi, kompresi, dan geseran.
1. Perputaran (rotasi)
Jika untuk masing-masing titik dalam bidang terhadap titik asal atau O(0,0)
melalui sudut kita dapatkan bahwa matriks baku untuk T adalah :
cos 𝜃
[
sin 𝜃
− sin 𝜃
]
cos 𝜃
2. Refleksi
Refleksi terhadap sebuah garis l melalui titik asal adalah transformasi yang
memetakan masing-masing titik pada bidang ke dalam bayangan cerminnya
terhadap l. Refleksi adalah transformasi linear. Kasus yang paling penting
adalah refleksi terhadap sumbu koordinat dan garis y = x.
Refleksi terhadap sumbu y adalah
[
−1 0
]
0 1
1
Refleksi terhadap sumbu x adalah [
0
0
Refleksi terhadap garis y = x adalah [
1
3. Ekspansi dan Kompresi
0
]
−1
1
]
0
Jika koordinat x dari masing-masing titik pada bidang dikalikan dengan konstanta k
yang positif, maka efeknya adalah memperluas atau mengkompresi masing-masing
gambar dalam arah x.
Jika :
a. 0 < k < 1 , maka hasilnya adalah kompresi
b. k > 1 , maka hasilnya adalah ekspansi
Transformasi yang demikian dinamakan ekspansi (atau kompresi) dalam arah x
dengan faktor k. Demikian juga jika koordinat y dari masing-masing titik dikalikan
dengan konstanta k positif, maka didapatkan sebuah ekspansi (atau kompresi) dalam
arah y dengan faktor k. Ekspansi dan kompresi sepanjang sumbu-sumbu koordinat
adalah transformasi linear.
Jika 𝑇 ∶ 𝑅 2 → 𝑅 2 adalah ekspansi atau kompresi dalam arah x dengan faktor k,
1
𝑘
0
0
maka 𝑇(𝑒1 ) = 𝑇 ([ ]) = [ ] 𝑇(𝑒2 ) = 𝑇 ([ ]) = [ ]
0
1
1
0
𝑘 0
sehingga matriks baku untuk T adalah [
]
0 1
demikian juga matriks baku untuk ekspansi atau kompensasi untuk arah y adalah
1 0
[
]
0 𝑘
4. Geseran
Sebuah geseran dalam arah x dengan faktor k adalah transformasi yang
menggerakkan masing-masing titik (x,y) sejajar dengan sumbu x sebanyak ky menuju
kedudukan yang baru (x + ky, y).
Di bawah transformasi seperti itu, titik-titik pada sumbu x tidak digerakkan karena y
= 0. Akan tetapi, sewaktu kita makin menjauh dari sumbu x, besar y bertambah,
sehingga titik-titik yang lebih jauh dari sumbu x bergerak sejarak yang lebih besar
dari titik-titik yang lebih dekat ke sumbu x tersebut.
Sebuah geseran dalam arah y dengan faktor k adalah transformasi yang
menggerakkan masing-masing titik (x,y) sejajar dengan sumbu y sebanyak kx menuju
kedudukan yang baru (x, y + ky).
Di bawah transformasi seperti ini, maka titik-titik pada sumbu y tetap diam dan titiktitik yang lebih jauh dari sumbu y bergerak sejarak yang lebih besar dari titik-titik
yang lebih dekat ke sumbu y tersebut.
Dapat kita perlihatkan bahwa geseran adalah transformasi linear. Jika 𝑇 ∶ 𝑅 2 → 𝑅 2
adalah searah dengan faktor k yang mengarah x, maka
1
1
0
𝑘
𝑇(𝑒1 ) = 𝑇 ([ ]) = [ ]
𝑇(𝑒2 ) = 𝑇 ([ ]) = [ ]
0
0
1
1
1 𝑘
Sehingga matriks baku untuk T adalah [
]
0 1
Demikian juga, matriks baku untuk geseran dalam arah y dengan faktor k adalah :
1 0
[
]
𝑘 1
Hasil penelitian ini adalah jika diketahui merupakan ruang vektor berdimensi hingga
dan maka diperoleh matriks baku untuk refleksif, rotasi, ekspansi, kompresi dan
geseran. Masing-masing transformasi linier ini dilakukan terhadap sumbu-x, sumbu-y
dan sumbu- pada untuk medapatkan vektor-vektor kolom. Vektor-vektor kolom
sebagai hasil transformasi linier pada membentuk matriks baku untuk transformasi
linier yang bersesuaian pada ruang vektor . Hasil transformasi akan disajikan pada
Tabel 1 sampai Tabel 4.
Matriks baku untuk transformasi linier pada ruang vektor diperoleh dengan
menentukan refleksif, rotasi, ekspansi, kompresi serta geseran. Proses dalam
memperoleh matriks baku untuk transformasi linier dilakukakan dengan menuliskan
kembali basis baku, menentukan vektor-vektor kolom, dan menyusun kembali
sebagai matriks baku untuk setiap transformasi linier pada ruang vektor .
B. PERTEMUAN 12
1. Matriks Dari Suatu Transformasi Linear
2. Matriks B Yang Sama Dengan Matriks A
C. PERTEMUAN 13
1. Nilai Eigen Suatu Matriks
2. Vektor Eigen Suatu Matriks
3. Persamaan Karakteristik
D. PERTEMUAN 14
1. Ruang Eigen
2. Diagonalisasi Matriks
E. PERTEMUAN 15
1. Matriks Simetri
2. Diagonalisasi Matriks Secara Orthogonal