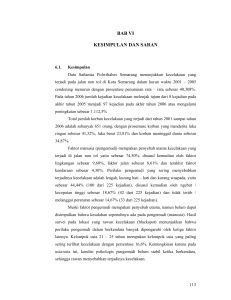
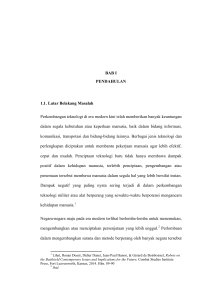
Soal UTS Rekayasa Lalu lintas lanjut (3 sks) Sifat ujian: Buka Buku Waktu: 1 minggu (1 Desember 2018) Dalam rangka menghadapi Revolusi Industri 4.0, yaitu salah satu tantangan dalam bidang transportasi adalah pembuatan kendaraan tanpa awak ( “AUTONOMOUS CAR, DRIVERLESS CAR” ). Untuk menghadapi tantangan ini, pada 2030-2045 Indonesia harus bisa merancang bentuk transportasinya. Saudara diminta untuk membuat paper mengenai “Smart Mobility” sesuai pandangan Saudara sendiri. Paper dikumpulkan melalui email: [email protected] nama file: uts tama rll 181 batas waktu: 1 Desember 2018 Jakarta, 24/11/2018 Dosen RLL Univ.Tama A.R. Indra Tjahyani PENGARUH KENDARAAN TANPA AWAK TERHADAP MOBILITAS (“The Impact of Autonomous Driving on Mobility”) Darmadi, 1751 006 08 mahasiswa strata 2, Jalan TB Simatupang, Tanjung Barat , Jakarta Selatan 3 Program Studi Magister Teknik Sipil, FT Universitas Tama Jagakarsa e-mail: [email protected] . 1. Pendahluan Tantangan utama transportasi mendatang adalah kendaraan yang hemat energi, pengurangan kemacetan, penggunaan mobil tanpa awak. Ketiga hal ini akan menjadi isu yang harus dipersiapkan langkah-langkah penyelesaian yang efektif dan efisien mulai dari sekarang untuk menunjang mobilitas manusia yang lebih tinggi. Sebelum penggunaan teknologi machine , pabrik-pabrik lebih banyak menggunakan sistim padat karya , jika ditinjau dari sudut pandang sosial, maka hal ini akan meberi kesempatan jutaan orang lebih bebas untuk melakukan pekerjaan dengan mempunyai penghasilan untuk hidupnya adalah baik. Sehingga orang bisa bekerja bebas menjadi seniman dan ilmuwan dan pengusaha atau bahkan petani. Kemajuan industri menyebabkan jutaan orang tiba-tiba kehilangan pekerjaan, ini adalah evolusi yang sangat buruk. Sebagai masyarakat awam, pasti tidak kuasa membantu melatih mereka, sehingga kita membiarkan mereka terabaikan dan para pekerja yang pekerjaannya menjadi kadaluwarsa tidak dapat mencari nafkah di bidang lain yang perlu keahlian yang berbeda . Hal ini akan selalu terjadi dalam sejarah manusia yang menuju kemajuan teknologi dan revolusi industri. Baru-baru ini sebuah program komputer dipakai pada sebuah robot yang bisa memasak dan bekerja secara efisien. Bahkan di dunia industri otomotif robot sudah dimanfaatkan dalam merakit komputer atau mobil dengan presisi lebih tinggi dan gak kenal lelah. Apalagi akhir – akhir ini dengan kemajuan teknologi maka muncullah kendaraan tanpa awak, sehingga kendaraan ini bisa berjalan sendiri tanpa harus ada sopirnya. Kondisi ini tentu saja , lagi-lagi, akan menyebabkan sesorang kehilangan pekerjaannya (“jobless”). Sehingga kondisi ini memaksa , sekarang, untuk memutuskan apa yang harus dilakukan Pemerintah terhadap para pengemudi yang menganggur karena kemajuan yang kita lakukan sekarang dan tentu saja akan menjadi preseden yang buruk. Di sisi lain kemajuan kendaraan tanpa awak ini juga menimbulkan masalah yang harus diselesaikan yaitu bagaimana pengaturan sistim tranpostasinya sehingga “safety car riding” menjadi lebih tinggi atau aman , pengurangan kecelakaan akibat tabrakan. Kecelakaan di jalan raya merupakan kecelakaan yang 90% mengakibatkan kematian (“the Eno Center for Transportation”, 2010, US). Banyak pihak mengusulkan penggunaan kendaraan tanpa awak / sopir dalam sistim transportasi yang diklaim akan mengurangi dampak kecelakaan. Sementara ini, anggapan bahwa jika menggunakan kendaraan tanpa sopir menjanjikan pengurangan kecelakaan secara signifikan turunnya angka kecelakaan atau bahkan akan menghilangkan kecelakaan akibat berlalulintas kendaraan di jalan atau memberikan kondisi keselamatan dalam berkendara atau bahkan bisa berkantor di mobil atau juga berkendara sambil rapat di dalamnya dan lain-lain.. Manuver kendaraan tanpa awak dalam lalu lintas melalui jaringan jalan tanpa mengharuskan manusia sebagai pengendali atau pengambil keputusan jalannya kendaraan. Kendaraan tanpa awak meningkatkan kenyamanan bagi penumpangnya dengan menghilangkan fungsi untuk melakukan tugas mengemudi dan juga akan menurunkan tingkat stress dalam perjalanan. Kendaraan tanpa awak menyediakan peluang mobilitas baru untuk kelompok orang yang sejauh ini sebagian atau seluruhnya merasa terbatas menggunakan kendaraan misalnya karena aturan ganjil genap, harus ada SIM , orang tidak bisa menyopir kendaraan dan lain-lain. Dengan adanya Driverless Vehicles akan menyediakan opsi mobilitas fleksibel untuk orang yang saat ini tidak dapat mengemudi karena fisik atau batasan yang berkaitan dengan usia; dan meningkatkan kenyamanan dan penggunaan waktu bepergian yang lebih efektif , menyenangkan dan bahkan sambil bekerja di dalam kendaraan. Tetapi pengadaan Driverless Vehicles juga mempengaruhi faktor karakterisitik lalulintas. Untuk memahami berbagai faktor yang menentukan pengaruh lalu lintas pada kendaraan tanpa awak, karakteristik utama adalah dari arus lalu lintas.. Dengan dasar ini, akan diperoleh dampak dari kendaraan tanpak awak pada kapasitas segmen jalan raya serta pada persimpangan dengan sinyal lalu lintas. Dampak kendaraan tanpa awak pada kualitas koneksi perjalanan yang mencakup berbagai elemen infrastruktur tidak dapat dijelaskan secara memadai dalam model, sehingga perlu justifikasi baru dalam pemodelan lalulintas. 2. Definisi Autonomous CAR Mobil self-driving (kadang-kadang disebut autonomous car atau driverless car atau mobil tanpa pengemudi) adalah kendaraan yang menggunakan kombinasi sensor, kamera, radar dan kecerdasan buatan (Artificial Inteligent) untuk melakukan perjalanan antar tujuan tanpa operator manusia. Agar memenuhi syarat sebagai tanpa awak sepenuhnya, kendaraan harus dapat menyetir sendiri tanpa intervensi manusia ke tujuan yang telah ditentukan sebelumnya di atas jalan yang telah disesuaikan untuk penggunaannya dengan pemrograman. The U.S. National Highway Traffic Safety Administration (NHTSA) menjabarkan enam tingkat otomatisasi, dimulai dengan nol, di mana manusia masih melakukan untuk mengemudi, melalui teknologi bantuan pengemudi hingga mobil yang sepenuhnya tanpa awak. Berikut adalah lima level yang mengikuti otomatisasi : Level 0 : Kendaraan tanpa sistim otomatisasi, dengan kendali sopir penuh. Level 1: Sistem bantuan pendorong lanjutan (Advanced Driver Assistance Systems) membantu pengemudi manusia dengan pengemudian, pengereman atau percepatan, meskipun tidak secara bersamaan. ADAS ini juga termasuk kamera pandangan belakang dan fitur seperti peringatan kursi bergetar untuk mengingatkan pengemudi ketika mereka tidak sesuai dengan rencana jalur perjalanan. Level 2: ADAS yang dapat dikemudikan dan baik rem atau berakselerasi secara bersamaan sementara pengemudi tetap sadar sepenuhnya di belakang kemudi dan terus bertindak sebagai pengemudi. Level 3: Sistem mengemudi otomatis (ADS) dapat melakukan semua tugas mengemudi dalam keadaan tertentu, seperti memarkir mobil. Dalam keadaan seperti ini, pengemudi manusia harus siap untuk mengambil kembali kendali dan masih harus menjadi pendorong utama kendaraan. Level 4: ADS mampu melakukan semua tugas mengemudi dan memantau lingkungan mengemudi dalam keadaan tertentu. Dalam keadaan itu, ADS cukup andal sehingga pengemudi manusia tidak perlu memperhatikan. Level 5: ADS kendaraan bertindak sebagai sopir virtual dan melakukan semua penggerak dalam semua keadaan. Penghuni manusia adalah penumpang dan tidak pernah diharapkan untuk mengendarai kendaraan. 3. Perkembangan Kendaraan tanpa awak Semua industri produsen kendaraan telah mengumumkan rencana untuk membuat AUTONOMOUS VEHICLE dan berencana untuk merilis kendaraan dengan beberapa fitur otomatis pada 2017, dan pada sistem level 3 diharapkan pada 2017 hingga 2020 telah diproduksi. Google telah mengumumkan rencana untuk merilis level 4 pada tahun 2017, dan Tesla telah mengumumkan niatnya memproduksi pada tahun 2020 mendatang. Para peneliti tidak setuju ketika AUTONOMOUS VEHICLE akan menjadi moda transportasi umum. IHS Automotive akan membuat produksi mobil tanpa awak untuk level 3 pada tahun 2020, level 4 pada 2025, dan level 5 hingga 2030, dengan target penjualan AUTONOMOUS VEHICLE mencapai 9% penjualan pada 2035 dan 90% armada kendaraan pada tahun 2055. Lembaga Informasi Asuransi Amerika mengklaim bahwa semua mobil dapat diotomatisasi pada 2030. KPMG, sebuah organisasi penelitian di Swiss, melakukan studi kelompok (focus group discussion) dan menemukan bahwa di berbagai demografi dan pada berbagai preferensi pengemudi, menyimpulkan bahwa Amerika lebih bersedia daripada tidak mempunyai mobil self-driving. Pada Negara lain lebih berhati-hati; Gomes melaporkan bahwa di antara 500 ahli yang menghadiri konferensi AUTONOMOUS VEHICLE baru-baru ini, setengahnya tidak mengharapkan untuk melihat level 4 AUTONOMOUS VEHICLE sampai 2030, dan 20% mengharapkan penerapannya pada 2040, dan 10% tidak pernah mengharapkan kendaraan ini beroperasi. Perkiraan mobil akan diproduksi pada sekitar tahun 2025, dan diprediksikan memiliki harga premium US $ 7.000 hingga $ 10.000, yang sepuluh kali lipat lebih mahal biaya prototipe hari ini. 4. Pengaruh terhadap paramater lalulintas Menurut Milakis (2015), menyatakan bahwa penggunaan kendaraan tanpa awak akan mengakibatkan pengaruh terhadap berbagai kegiatan atau komponen yang terkait, seperti terlihat di gambar berikut. Efek layer pertama mencakup implikasi dari pengemudian otomatis terhadap lalu lintas, biaya perjalanan, dan pilihan perjalanan. Menurut Hoogendoorn et al. (2014) otomasi mengemudi dapat berdampak pada kapasitas aliran bebas, stabilitas arus kendaraan, distribusi kendaraan di sepanjang jalur, penurunan kapasitas dan oleh karena itu akan memberikan pemilihan kapasitas efektif bagi pengemudi atau bahkan mengendalikan headway kendaraan dan kecepatan kendaraan. Peningkatan kapasitas dapat disertai dengan pengurangan tundaan kemacetan dan karena itu waktu tempuh yang lebih rendah dan biaya perjalanan yang lebih rendah. Biaya perjalanan juga dapat dikurangi melalui VTTS (“Value of Travel Time Savings”) yang lebih rendah dan juga karena peningkatan pengayaan perjalanan (penggunaan waktu yang lebih berguna saat bepergian, rapat di mobil, komunikasi bisnis, entertainmen), lebih sedikit tekanan karena tidak harus konsentrasi mengemudi, kenyamanan lebih baik, dan risiko kecelakaan yang lebih sedikit. Penurunan biaya perjalanan kendaraan ini kemudian dapat memicu perubahan dalam pilihan perjalanan baik dalam hal lebih banyak VKT (Vehicle Kilometers Traveled, karena peningkatan aksesibilitas di lokasi yang lebih jauh) dan pergeseran moda dari transportasi umum ke mobil. Riak kedua termasuk implikasi dari mengemudi otomatis sehubungan dengan kepemilikan kendaraan dan berbagi kendaraan, desain kendaraan, pemilihan lokasi dan penggunaan lahan, dan infrastruktur transportasi. Peningkatan kapasitas dapat mengurangi kebutuhan investasi infrastruktur jalan konvensional (Silberg et al., 2012; Eugensson et al., 2013; Fagnant dan Kockelman, 2015; Litman, 2014; Wagner et al., 2014) dan membebaskan ruang jalan untuk kepentingan umum atau keindahan perkotaan. 5. Keselamatan berkendara Dalam percobaan penggunaan driverless car oleh GOOGLE , sebuah mobil tanpa awak yang sedang diuji merek Waymo milik Google terlibat dalam tabrakan serius di California, ketika sebuah mobil yang dikendarai oleh manusia menyerempet kendaraan percobaan ini, dan menyebabkan operator (manusia) di Waymo menderita luka ringan. . Dalam sebuah laporan kecelakaan yang diajukan oleh DMV California pada 23 Februari 2016 , Google menulis bahwa mobil tanpa awaknya, Lexus SUV, sedang menyetir sendiri di El Camino Real di Mountain View. Kendaraan ini pindah ke jalur paling kanan untuk berbelok ke kanan menuju Castro Street, tetapi berhenti ketika mendeteksi kantong pasir yang ada di samping saluran dan menghalangi jalannya. Setelah beberapa mobil berlalu, Google AUTONOMOUS VEHICLE mulai berjalan kembali ke tengah-tengah jalur untuk melewati kantong pasir. Bus angkutan umum mendekat dari belakang. Pengemudi uji Google AUTONOMOUS VEHICLE melihat bus mendekati di cermin sisi kiri. tetapi percaya bus itu akan berhenti atau lambat untuk memungkinkan Google AUTONOMOUS VEHICLE melanjutkan. Sekitar tiga detik kemudian, ketika Google AUTONOMOUS VEHICLE masuk kembali ke pusat jalur itu, dia menyerempet sisi bus. Mobil Google berada dalam mode otomatis full dan mengemudi pada kecepatan 40 km/jam pada saat kecelakaan terjadi. Bus itu mengemudi sekitar 65 km/jam. Tidak ada cedera yang dilaporkan, tetapi roda depan kiri dan fender mobil Google rusak. Ini adalah kecelakaan kecil dengan implikasi serius: Kendaraan tanpa awak Google telah mengalami kecelakaan sebelumnya, tetapi raksasa teknologi itu selalu cepat menyadari bahwa teknologinya tidak pernah salah (mobil cenderung mendapatkan lampu merah pada bagian belakang). Mungkin tidak bisa mengatakan itu lagi. Mobil Google telah berjalan lebih dari 1,3 juta mil sejak 2009. Mereka dapat mengenali sinyal tangan dari petugas lalu lintas dan "berpikir" dengan kecepatan yang tidak dapat ditandingi oleh manusia. Kendaraan ini sepanjang perjalanannya telah terlibat dalam 17 kecelakaan, semuanya disebabkan oleh kesalahan manusia. Google menyatakan bahwa mereka akan siap jalan pada tahun 2020. 6. Perubahan paradigma dalam mobilitas Semakin banyak bukti empiris menunjukkan bahwa penggunaan driverless car dapat memberikan manfaat yang banyak dalam bidang transportasi, penggunaan lahan lebih efisien, lingkungan, dan sosial. Sedangkan studi dampak pada perjalanan pulang pergi menjadi lebih terbuka luas, dampak berkendara bersama (ridesharing) dan model layanan mobil pesan (“ridesourcing”) akan bermunculan dengan sistim yang lebih baru.. Salah satu efek paling mencolok dari sistim perjalanan adalah mengurangi kepemilikan kendaraan. Berdasar penelitian bahwa setiap kendaraan public (“carsharing”) akan menghilangkan 9 dari 13 kendaraan yang akan dibeli dan beroperasi di jalanan.. Kebanyakan pergeseran kepemilikan kendaraan ini secara otomatis ini dalam satu rumah menjadi carless, kemudian ada yang tadinya dua mobil rumah tangga menjadi satu mobil untuk satu rumah tangga. Studi terbaru dan hasil survei anggota dirilis oleh organisasi carharing Amerika Serikat dan Kanada menunjukkan bahwa 25 hingga 35% dari anggota carsharing menjual kendaraan pribadi mereka, dan antara 35 hingga 71% anggota menghindari pembelian mobil baru beralih ke penggunaan mobil carsharing. Sebuah penelitian studi oleh Martin dan Shaheen mencatat bahwa 25% dari anggota menjual kendaraan dan 25% dari anggota menunda pembelian kendaraan karena mobil berbagi (“carsharing”, sewaan) dengan mengambil sampel sekitar 9500 peserta. Selain itu, pengurangan kepemilikan mobil umumnya terkait dengan peningkatan jalan kaki, carpooling, dan penggunaan moda sepeda serta berkurangnya kapasitas parkir... Studi pada enam lokasi di seluruh Utara Amerika menemukan bahwa antara 13,5 dan 54% menggunakan angkutan umum lebih senang daripada menggunakan mobil pribadi. 7. Pengaruh terhadap sistim transportasi Telah banyak lembaga membahas kendaraan tanpa awak (CAUTONOMOUS VEHICLE=Connected Autonomous Vevicle) dan juga merencanakannya, tetapi di bidang transportasi lebih banyak penekanan untuk memahami apa pengaruhnya terhadap aspek jaringan transportasi yang mungkin terjadi, dan menentukan apakah dampaknya akan positif atau negatif, dan apa keputusan kebijakan yang dapat dilakukan Pemerintah untuk mendorong atau mengurangi dampaknya.. Pada analisis transportasi dampak pada tingkat paling dasar, ada dua elemen yang berpengaruh apakah jalan akan mengalami kemacetan, yaitu kapasitas dan volume lalulintas. Bersama-sama kedua elemen ini memungkinkan dinuat analisis volume rasio kapasitas yang merupakan parameter utama untuk memahami kinerja jalan raya. Dampak CAUTONOMOUS VEHICLE pada Estimasi Kapasitas Penyebab utama kemacetan adalah rendahnya kapasitas jalan , misalnya adanya bottle neck (40%) yang terjadi. Kapasitas jalan raya dapat ditentukan pada umumnya dengan dua cara, yaitu dengan perkiraan secara konseptual perkembangan wilayah atau analisis rinci menggunakan pemodelan dan simulasi. Yang pertama adalah metode yang lebih filosofis dan subyektifitasnya kurang bisa dikendalikan, sedang cara kedua lebih reliable karena ada anlisis matematisnya. Kapasitas pada metode ini akan mempertimbangkan perbedaan antara driver manusia dan driver komputer dalam kendaraan di jalan raya. Berdasarkan penelitian bahwa AUTONOMOUS VEHICLE dapat mengurangi kecelakaan hingga lebih dari 90%, (menurut laporan NHTSA, USA) dan ternyata kecelakaan yang terjadi penyebab utama adalah faktor manusia dengan 93% kejadian kecelakaan lalu lintas. Penyebab manusia ini termasuk, antara lain, pengalihan yang terganggu (misalnya, telepon seluler , melihat kecelakaan di jalur lain dan berkaraoke di kendaraan) dan insiden terkait alkohol. Pengurangan kapasitas oleh melihat kecelakaan di jalur lain (“rub-berneckers”), yang memperlambat untuk melihat apa yang terjadi, bisa 5% hingga 25% dari kapasitas menurun yang disebabkan oleh kecelakaan dalam arah utama perjalanan searah pengendara.. Dengan insiden lalu lintas yang menyebabkan sekitar 25% dari penundaan lalu lintas di jalan-jalan ini akan menjadikan kemacetan yang substansial.. Metode pemodelan dan simulasi memungkinkan untuk analisis dan interaksi yang lebih mendalam. dari variabel. Hal ini memungkinkan peneliti untuk lebih tepat memahami efek AUTONOMOUS VEHICLEs dalam skenario tertentu dan memberikan pemahaman yang lebih baik tentang efek dari tingkat pertumbuhan kendaraan yang berbeda.. Menggunakan simulasi segmen jalan raya satu jalur, Shladover et al. menemukan bahwa kapasitas lajur meningkat secara kuadratis dengan tingkat pertumbuhan. Ada pertumbuhan kapasitas yang tidak dapat ditembus pada tingkat pertumbuhan 10%, peningkatan 20% dalam kapasitas lajur pada 50% penetrasi pasar, dan kapasitas hampir dua kali lipat pada penetrasi pasar 100%. Tren ini menjadi lebih linier ketika diasumsikan bahwa kendaraan yang tidak dilengkapi dengan CACC masih mampu menyiarkan posisi dan kecepatannya untuk membantu kendaraan yang dilengkapi CACC, perubahan yang penulis sarankan bisa menjadi upgrade aftermarket yang sangat murah. Itu kemudian bisa diterjemahkan ke dalam suatu pro gram yang dapat didukung oleh lembaga perencanaan. Talebpour dan Mahmassani menemukan hasil serupa sekitar 100% peningkatan throughput di jalan raya untuk 100% CAUTONOMOUS VEHICLE ketika secara matematis menganalisis jalan raya satu jalur dengan segmen penggabungan menggunakan analisis stabilitas string (16). Perlu dicatat, bagaimanapun, bahwa tak satu pun dari metode ini tampaknya memperhitungkan perilaku menenun, khususnya interaksi antara CAUTONOMOUS VEHICLE dan kendaraan yang digerakkan oleh manusia. Dalam kelompok yang homogen, ada keuntungan untuk interaksi. Dua driver otomatis akan dapat mengkoordinasikan reaksi perubahan jalur yang tepat bahkan selama lalu lintas padat. Dua pengemudi manusia dapat memperoleh keuntungan dalam lalu lintas padat dengan mengayunkan kendaraan masuk dan keluar atau lampu depan mereka untuk memberi tahu pengemudi bahwa mereka akan menyerah meskipun aturan jalan tidak akan mengasumsikan perilaku itu. Ketika ada pengemudi otomatis dan manusia yang terlibat dalam perubahan jalur ini, tidak ada manfaat yang akan hadir, yang dapat mengurangi kapasitas jalan dengan cara yang tidak langsung jelas dengan hanya mempertimbangkan kapasitas jalur. Laporan dari UK DOT digunakan microsimulation untuk melihat tidak hanya pada tingkat yang berbeda dari otomasi kendaraan dan penetrasi pasar, tetapi juga pada karakteristik kinerja yang berbeda dari AUTONOMOUS VEHICLEs berdasarkan kenyamanan penghuni. Hasil penelitian menunjukkan bahwa ketegasan AUTONOMOUS VEHICLEs secara dramatis akan berdampak pada kapasitas jalan raya bahkan sampai pada tingkat penurunan ukuran kinerja untuk beberapa skenario (17). Ini mungkin beberapa temuan terpenting dari semua simulasi yang telah dilakukan. Ini menggambarkan pentingnya asumsi model. Dengan sangat sedikit masukan yang begitu jauh dari produsen peralatan asli (OEM) pada spesifikasi desain, tidak ada peraturan yang ada, dan tidak ada data dunia nyata berskala besar, para perencana menghadapi tantangan yang sulit. Sebagai contoh, buku panduan terbaik Texas DOT untuk mempersiapkan Texas untuk AUTONOMOUS VEHICLEs menyatakan bahwa karena "model lalu lintas AUTONOMOUS VEHICLE adalah perkembangan terakhir dalam literatur, model car-following kami mungkin bukan model yang sepenuhnya akurat dari perilaku AUTONOMOUS VEHICLE ketika AUTONOMOUS VEHICLE tersedia untuk sebagian besar wisatawan di sana . Kemudian dalam buku panduan best-practices, pemodelan perilaku keselamatan yang ekstensif menunjukkan pengurangan dramatis dalam tabrakan belakang, tetapi pengurangan minimal konflik di persimpangan atau perubahan jalur. Dengan teknologi yang ada untuk deteksi titik buta, kemampuan kendaraan untuk mengkomunikasikan lokasi mereka, dan penelitian tentang kemampuan AUTONOMOUS VEHICLE untuk menghilangkan sinyal lalu lintas, akan terlihat bahwa baik konflik dan kecelakaan di persimpangan atau perubahan jalur harus menurun, terutama pada kondisi penuh. penetrasi pasar. Tidak ada pengurangan nyata yang menunjukkan bahwa perilaku mengemudi dalam model masih membutuhkan penyesuaian, atau bahwa apa yang ditentukan sebagai kemungkinan konflik oleh model penilaian keselamatan FHWA pengganti perlu disesuaikan untuk memperhitungkan penggerak yang lebih tepat yang diaktifkan dengan CAUTONOMOUS VEHICLEs. Dampak dari CAUTONOMOUS VEHICLEs pada Volume Lalulintas CAUTONOMOUS VEHICLE akan memiliki kemampuan untuk secara signifikan mengubah cara orang melakukan perjalanan. Perubahan ini, bahkan lebih daripada perubahan kapasitas, sulit diperkirakan. Misalnya, teknologi CAUTONOMOUS VEHICLE akan menciptakan pengurangan waktu perjalanan lima hingga lima belas menit, dan pengurangan lima menit dalam waktu perjalanan akan meningkatkan perjalanan di jalan itu sebesar 20% hingga 60% sementara pengurangan lima belas menit dalam waktu perjalanan kemungkinan akan menginduksi 50% hingga 120% lebih banyak trafik, maka variabilitas sebenarnya trafik sebenarnya 20% hingga 120%. Gambar di atas CAUTONOMOUS menggambarkan VEHICLE, yang ketidakpastian berpengaruh ke kendaraan berbagai metode parameter lalulintasbaik pada proses perencanaan, dan tentu saja akan berpengaruh pada perencanaan sistim transportasi. Badan Perencanaan Transportasi Miami-Dade menyatakan bahwa sangat penting untuk memperbarui model bangkitan perjalanan-permintaan sebelum mereka melakukan pembaruan perhitungan parameter lalulintas . Perjalanan jarak jauh akan meningkat karena penurunan nilai waktu yang dihabiskan selama bepergian, karena waktu di dalam mobil sekarang dapat digunakan untuk menyelesaikan tugas lain selain mengemudi.. Dengan demikian, penting bagi para perencana untuk secara jelas menentukan tujuan dan sasaran mereka sebelum mencoba mengevaluasi setiap tindakan yang akan dilakukan. Mengingat bahwa memprediksi ketidakpastian dan kebutuhan perjalanan sangat sulit, beberapa proyek telah mencoba untuk melihat masalah dari arah lain. Alih-alih memprediksi ketidakpastian, mereka melakukan analisis sensitivitas pada beberapa alternatif terbaik untuk melihat apa rentang kebutuhan perjalanan sebagai solusi desain tetap menjadi pilihan optimal. Perubahan dalam pemikiran ini berarti perencana atau pengambil keputusan tidak lagi harus menentukan nilai spesifik untuk perubahan kebutuhan perjalanan tetapi hanya seberapa besar kemungkinan kebutuhan perjalanan akan bergeser melampaui ambang batas yang ditentukan. 8. Pengaturan sistim transportasi Belum banyak penelitian mengenai perilaku lalulintas pada kendaraan tanpa awak. Penelitian telah dilakukan di banyak negara, dengan simulasi yang berbeda dan tujuan yang berbeda, parameter, input dan output yang digunakan juga bervariasi.. Jika ada beberapa konsep mobilitas yang dipelajari dalam satu makalah penelitian yang sama, maka ditandai dengan (a), (b) dll.. Hasil dan perspektif khusus yang tidak tercakup dalam gambar berikut. Gambar 2. Skala percobaan dan Jenis kendaraan Tabel 1. Hasil percobaan driverless CAR Menurut penelitian dari Bernhard Friedrick mengenaui “The Effect of Autonomous Vehicles on Traffic” , menyampaikan perilaku lalulintas sebagai gambar berikut : Dalam penelitiannya menyampaikan tiga hal terkait kapasitas jalan, Stabilitas dan efisiensi penggunaan kendaraan tanpa awak, dengan hasil sebagai berikut : a. Kapasitas jalan Kapasitas akan naik jika menggunakan mobil tanpa awak tetapi hanya bergerak bercampur dengan mobil penumpang, sedangkan jika kendaraan tanpa awak berjalan bercampur dengan kendaraan truk maka kapasitas akan menurun sesuai dengan prosentase truk yang berjalan bersama. Jika berada diantara mobil pribadi jika bercampur dengan kendaraan truk b. Stabilitas Selain kapasitas yang setara dengan volume lalu lintas terbesar yang dapat digunakan oleh arus lalu lintas di jalan yang diberikan dan kondisi lalu lintas pada penampang melintang, stabilitas arus lalu lintas merupakan faktor penting dalam efisiensi perjalan. Ini menjadi jelas ketika kapasitas dianggap sebagai variabel stokastik yang mewakili kemungkinan kerusakan lalu lintas sebagai fungsi dari intensitas lalu lintas. Semakin besar standar deviasi dari distribusi probabilitas, semakin besar kemungkinan kerusakan lalu lintas pada volume lalu lintas yang lebih rendah dan dengan demikian ketidakstabilan menjadi tinggi. Jika kerusakan terjadi, kapasitas berkurang karena efek “penurunan kapasitas” yang besarnya sekitar 10%. Dengan jumlah lajur yang sama dan kondisi kerangka lalu lintas yang sama (volume lalu lintas, proporsi lalu lintas yang padat), faktor spasial dan temporal yang berbeda menghasilkan fungsi distribusi kapasitas yang berbeda. Faktor-faktor kunci dalam hal ini adalah kecepatan dan distribusi kesenjangan waktu. Semakin kecil standar deviasi, akan semakin stabil arus lalu lintas , dan semakin sedikit kerusakan yang diharapkan pada volume lalu lintas tinggi. Terutama ketika kendaraan tanpa awak mampu mengantisipasi tindakan kendaraan sebelumnya melalui komunikasi elektroniknya, mereka dapat berkontribusi pada stabilisasi arus lalu lintas dan dengan demikian stabilitas arus lalulintas dapat terjamin dengan penggunaan kendaraan tanpa awak. c. Efisiensi 9. Skenario transportasi 2030 Pendekatan skenario diperlukan untuk lebih mendemonstrasikan kemungkinan dampak Driverless Vehicles untuk tahun 2030 dengan mengembangkan tiga skenario berikut: a. "Otomatisasi evolusi" b. "Revolusi Teknologi" c. "Memikirkan kembali (auto) mobilitas" Perlu dilakukan perhitungan dampak dari Driverless Vehicles pada perilaku mobilitas untuk masing-masing skenario menggunakan kendaraan berteknologi otomatisasi dalam hubungannya dengan model kebutuhan perjalanan. Perubahan nilai waktu kapan mengendarai AUTONOMOUS VEHICLE dan kapan harus yang konvensional, belum ada penelitian yang serius , Karena kurangnya data, skenario untuk China belum dimodelkan dan karena itu mengikuti pendekatan yang lebih kualitatif, yang mencerminkan hasil dari fokus group discussion dan lokakarya ahli-ahli yang dilakukan di Cina. Skenario "otomatisasi Evolusi" menggambarkan kemungkinan masa depan yang evolusi lebih lanjut perkembangan penggunaan AVs alat transportasi secara keseluruhan. Dalam skenario ini diharapkan bahwa kendaraan yang sangat otomatis pertama (Level 4) masuk ke pasar mulai 2025 dan seterusnya, dan kendaraan otomatis (Level 5) masuk pada tahun 2030. Teknologi ini akan diperkenalkan pertama kali di segmen mewah dan kemudian di segmen kendaraan yang lebih kecil.. Remaja dari usia 14 tahun diperbolehkan menggunakan AV. Panjang perjalanan kendaraan dalam kilometer kendaraan cukup moderat, yaitu naik 2,5% dan 3,5% masing-masing di Jerman dan Amerika Serikat. Skenario "Penerapan Revolusi Teknologi" mengasumsikan perkembangan penggunaan mobil otomatisas yang lebih progresif dari armada AV, dengan AV pertama akan masuk ke ke pasar mulai 2022 dan seterusnya. Menggunakan AV adalah legal untuk semua orang dari umur sepuluh tahun sampai orang tua. Itu akan meningkatkan penggunaan armada AV sebesar 32-42%, dan meningkatkan penjualan mobil baru 75-80% . Implikasinya, ada dampak yang lebih besar dari otomatisasi in yaitu terjadinya pergeseran moda dan jarak tempuh kendaraan dalam kilometer kendaraan (VKT) daripada di skenario sebelumnya, dengan peningkatan jarak tempuh kendaraan sekitar 8,5% di kedua negara yaitu Jerman dan Amerika. Dalam skenario "Memikirkan kembali penggunaan (auto) mobilitas", AV adalah, di samping penggunaan pribadi mereka, juga penggunaan untuk mobilitas on demand konsep. Peraturan telah berubah sedemikian rupa sehingga kendaraan dibiarkan bergerak tanpa manusia di dalamnya. Oleh karena itu pemodelan sistem Automatitaon Car-Sharing (ACS) dan penggunaan kendaraan bersama dengan berkumpul lebih dahulu (Automatitaion Pooling, AP), akan menggunakan waktu akses yang rendah. Sistem ACS memungkinkan paling banyak satu kelompok orang di mobil yang sama setiap saat, sedangkan sistem AP memungkinkan lebih dari satu kelompok orang dalam satu mobil yang sama, yaitu berbagi perjalanan dan biaya lebih murah karena berbagi ongkos; Namun, sistim AP mengharuskan penumpang sabar karena harus berjalan memutar untuk mengambil dan mengantar orang lain. 10.Kesimpulan dan Saran 1. Kesimpulan a. Kendaraan tanpa awak akan meningkatkan kapasitas jalan b. Kendaraan tanpa awak akan mengurangi kejadian kecelakaan dan menurunkan tingkat stress penumpang. c. Kendaraan tanpa awak meerlukan pengaturan yang benar untuk menghindari kecelakaan dan juga kemacetan yang parah. d. Kendaraan tanpa awak meningkatkan mobilitas. 2. Saran a. Penerapan di Indonesia masih perlu banyak uji coba mengingat kondisi jalan yang tidak seragam dan perilakuk pengendara mobil dengan sopir yang masih kurang disiplin. b. Penerapan awal sebaiknya diterapkan pada kendaraan yang berjalur khusus sebagai lahan uji-coba, misalnya jalur busway. c. Pembuatan regulasi yang baik dan mengadomodasi segala resiko termasuk aturan harus mempunyai asuransi kecelakaan, menganalisis kerangka hukum dan peraturan bagi inovasi ini. d. Sebaiknya semua pengguna jalur menggunakan kendaraaan tanpa awak tidak ada kendaraan yang dioperasikan manusia e. Meningkatkan kedisiplinan orang Indonesia dalam melakukan berkendaraan tidak main serobot kana-kiri semaunya. 3. Daftar Pustaka Department for Transport. Research on the Impacts of Connected and Autonomous Vehicles (CAUTONOMOUS VEHICLEs) on Traffic Flow. Summary Report. 5145311. 2016. DuPuis, N., M. Cooper, and B. Rainwater. City of the Future Technology and Mobility. National League of Cities. 2015. Accessed June 15, 2017. Miami-Dade Transportation Planning Organization (TPO), Impact of Future Technology in the 2045 LRTP.. Prepared by The Corradino Group. 2017. MetroPlan Orlando. 2017., Intelligent Transportation Systems Master Plan. MN. Nasution, MSr, “Manajemen Transportasi”, PT. Ghalia Indonesia, 2010 New York Metropolitan Transportation Council (NYMTC), Regional Transportation Plan 2045 Maintaing the Vision for a Sustainable Region.. 2017. Stanford.edu. SAE Levels of Driving Automation. Stanford Law School. 2016. http://cyberlaw.stanford.edu/files/blogim-ages/LevelsofDrivingAutomation.pdf. Accessed July 24, 2017 Federal Highway Administration , Traffic Congestion and Reliability Trends and Advanced Strategies for Congestion Mitigation. Cambridge Systematics., 2005.