Uploaded by
common.user41006
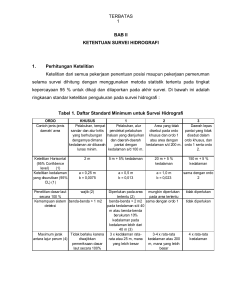
Laporan Survei Hidrografi: Batimetri dan Analisis Pasang Surut
advertisement

Cover KATA PENGANTAR DAFTAR ISI KATA PENGANTAR ................................................................................................................ i DAFTAR ISI............................................................................................................................... i DAFTAR GAMBAR ................................................................................................................ iv DAFTAR TABEL ..................................................................................................................... iv BAB 1. PENDAHULUAN ........................................................................................................ 6 1.1 Latar belakang ............................................................................................................. 6 1.2 Tujuan.......................................................................................................................... 6 1.3 Manfaat........................................................................................................................ 6 BAB 2. TINJAUAN PUSTAKA ............................................................................................... 6 2.1 Survei Hidrografi......................................................................................................... 6 2.2 Global Positioning System (GPS) ............................................................................... 8 2.2.1 Global Positioning System (GPS)........................................................................ 8 2.2.2 Karakteristik Baseline .......................................................................................... 8 2.2.3 Metode Pengukuran GPS ..................................................................................... 8 2.2.4 Ground Control Point (GCP) .............................................................................. 8 2.2.5 Independent Check Point (ICP) ........................................................................... 8 2.2.6 Kesalahan Dan Bias Pada Pengamatan GPS ....................................................... 8 2.3 Kerangka Kontrol Horizontal (KKH) ......................................................................... 8 2.3.1 Poligon ................................................................................................................. 8 2.3.2 Bentuk Poligon..................................................................................................... 8 2.3.3 Formula Pengukuran Poligon .............................................................................. 8 2.3.4 Pengukuran Detil ................................................................................................. 8 2.4 Kerangka Kontrol Vertikal (KKV) ............................................................................. 8 2.4.1 Prinsip Pengukuran Beda Tinggi ......................................................................... 8 2.4.2 Metode Pengukuran Beda Tinggi ........................................................................ 8 2.4.3 Formula Pengukuran Beda Tinggi ....................................................................... 8 2.5 Perataan Kuadrat Terkecil ........................................................................................... 8 2.5.1 Perataan Bersyarat ............................................................................................... 8 2.5.2 Perataan Parameter............................................................................................... 8 i 2.5.3 2.6 Perataan Parameter Bersyarat .............................................................................. 8 Pasang Surut ................................................................................................................ 8 2.6.1 Definisi Pasang Surut ........................................................................................... 8 2.6.2 Tipe Pasang Surut ................................................................................................ 9 2.6.3 Penentuan Referensi Pasang Surut..................................................................... 11 2.7 Survei Batimetri ........................................................................................................ 11 2.7.1 Pemeruman ........................................................................................................ 12 2.7.2 Single Beam Echosounder (SBES) .................................................................... 16 2.7.3 Multi Beam Echosounder (MBES) .................................................................... 20 2.7.4 Side Scan Sonar (SSS) ....................................................................................... 22 2.8 Oseanografi ............................................................................................................... 24 2.8.1 Arus Laut ........................................................................................................... 24 2.8.2 Sedimen.............................................................................................................. 24 2.8.3 Salinitas .............................................................................................................. 24 2.8.4 Diagram Mawar ................................................................................................. 24 2.9 Foto Format Kecil ..................................................................................................... 24 2.9.1 Fotogrametri ....................................................................................................... 24 2.9.2 Desain Jalur Terbang ......................................................................................... 24 2.9.3 Orientasi Foto..................................................................................................... 24 2.9.4 Orthorektifikasi .................................................................................................. 24 2.9.5 Root Mean Square.............................................................................................. 24 2.9.6 Ground Sampling Distance ................................................................................ 24 2.10 Toponimi ................................................................................................................... 24 2.10.1 Definisi Toponimi .............................................................................................. 24 2.10.2 Desa.................................................................................................................... 24 2.10.3 Gazetir ................................................................................................................ 24 2.10.4 Landmark ........................................................................................................... 24 2.10.5 Data Kependudukan ........................................................................................... 24 2.10.6 Metode Sampling ............................................................................................... 24 2.10.7 Pengolahan Data Survei Statistik ....................................................................... 24 2.11 Peta ............................................................................................................................ 24 2.11.1 Definisi Peta ....................................................................................................... 24 2.11.2 Peta Potensi Wisata ............................................................................................ 24 ii 2.11.3 Peta Desa ............................................................................................................ 24 2.11.4 Peta Bathimetri................................................................................................... 24 2.11.5 Teknik Penyajian Peta........................................................................................ 24 2.11.6 Software Yang Digunakan ................................................................................. 24 BAB 3. METODOLOGI PELAKSANAAN ........................................................................... 24 3.1 Lokasi Dan Waktu Pelaksanaan ................................................................................ 24 3.2 Alat Dan Bahan ......................................................................................................... 24 3.2.1 GPS .................................................................................................................... 24 3.2.2 Shoreline ............................................................................................................ 24 3.2.3 Pasut ................................................................................................................... 24 3.2.4 Oseanografi ........................................................................................................ 24 3.2.5 Sounding .................................................. Ошибка! Закладка не определена. 3.2.6 Toponimi ............................................................................................................ 28 3.2.7 Foto Udara ......................................................................................................... 28 3.3 Jadwal Pelaksanaan ................................................................................................... 28 3.4 Metode Pelaksanaan .................................................................................................. 28 3.4.1 GPS .................................................................................................................... 28 3.4.2 Shoreline ............................................................................................................ 28 3.4.3 Pasut ................................................................................................................... 28 3.4.4 Oseanografi ........................................................................................................ 28 3.4.5 Sounding .................................................. Ошибка! Закладка не определена. 3.4.6 Toponimi .............................................................................................................. 1 3.4.7 Foto Udara ........................................................................................................... 4 3.5 Struktur Tim ................................................................................................................ 5 BAB 4. HASIL DAN ANALISIS .............................................................................................. 5 4.1 Hasil ............................................................................................................................ 5 4.1.1 Gps ....................................................................................................................... 5 4.1.2 Shoreline .............................................................................................................. 5 4.1.3 Pasut ..................................................................................................................... 5 4.1.4 Oseanografi .......................................................................................................... 5 4.1.5 Sounding .................................................. Ошибка! Закладка не определена. 4.1.6 Foto Udara ......................................................................................................... 15 4.1.7 Toponimi ............................................................................................................ 15 iii 4.2 Analisis ...................................................................................................................... 15 4.2.1 Gps ..................................................................................................................... 15 4.2.2 Shoreline ............................................................................................................ 15 4.2.3 Pasut ................................................................................................................... 15 4.2.4 Oseanografi ........................................................................................................ 15 4.2.5 Sounding .................................................. Ошибка! Закладка не определена. 4.2.6 Foto Format Kecil .............................................................................................. 21 4.2.7 Toponimi ............................................................................................................ 21 BAB 5. PENUTUP .................................................................................................................. 21 5.1 Kesimpulan................................................................................................................ 21 5.2 Saran ............................................................................................................................... 22 DAFTAR PUSTAKA .............................................................................................................. 22 LAMPIRAN ............................................................................................................................. 22 DAFTAR GAMBAR DAFTAR TABEL iv v BAB 1. PENDAHULUAN 1.1 Latar belakang 1.2 Tujuan 1.3 Manfaat BAB 2. TINJAUAN PUSTAKA 2.1 Survei Hidrografi Hidrografi (atau geodesi kelautan) adalah ilmu tentang pemetaan laut dan pesisir. Menurut International Hydrographic Organization (IHO), Hidrografi adalah ilmu tentang pengukuran dan penggambaran parameter-parameter yang diperlukan untuk menjelaskan sifat-sifat dan konfigurasi dasar laut secara tepat, hubungan geografisnya dengan daratan, serta karakteristik dan dinamika lautan. Secara etimologi, Hidrografi berasal dari bahasa Yunani yang terdiri dari kata “hidro” yang berarti air dan “grafi” yang berarti menulis, hidrografi artinya gambaran permukaan bumi yang digenangi air. Hidrografi secara sederhana bertujuan untuk menggambarkan relief dasar laut, mencakup semua unsur alam dan buatan manusia yang pada prinsipnya hampir sama dengan peta darat yang dalam hal ini topografi (Ingham, 1984). Namun demikian dengan perkembangan jaman dan kemajuan teknologi, survei hidrografi mempunyai pengertian yang lebih luas lagi. Selama 20 tahun terakhir, telah terjadi pergeseran mendasar pada lingkup dan aplikasi hidrografi. Hidrografi tidak lagi semata-mata dikaitkan dengan pemetaan laut dan penetuan posisi, melainkan juga dengan hukum laut dan aspek fisik dari pengelolaan kawasan pesisir secara terpadu (Dyer, 1979; de jong et al.,2002). Apabila diamati lebih jauh, maka definisi Hidrografi lebih luas lagi jangkauannya, aktivitas lepas pantai dan proteksi terhadap lingkungan pun termasuk ke dalamnya. Kebutuhan akan keteknikan maupun data yang berhubungan dengan sekitarnya dari industri maritim tentunya memerlukan kegiatan-kegiatan survei. Kegiatan-kegiatan tersebut yaitu (International Hydrographic Organization (IHO), 1988): survei penentuan posisi (positioning), survei batimetri, pengamatan pasang surut, arus, gelombang, sedimen, temperatur, salinitas, seismik, survey magnetis dan survei gravimetrik 6 Gambar 2.1. Survei Hidrografi Hidrografi sendiri sangat berguna dalam navigasi maritim, konstruksi kelautan dan eksplorasi minyak lepas pantai. Survei hidrografi mutlak dilakukan dalam tahapan eksplorasi maupun feasibility study. Informasi yang diperoleh dari kegiatan ini untuk pengelolaan sumber daya laut seperti minyak dan konstruksi kelautan. Kebutuhan teknologi survei dan pemetaan laut yang modern ini merupakan suatu kebutuhan, apalagi dengan berlakunya UNCLOS 1982 (United Nations Convention on Law of The Sea). Kompetensi profesi dan Akademisi Hidrografi dikelompokkan menjadi beberapa aplikasi yaitu (IHO, 2001): 1. Nautical Charting (Pemetaan Laut) 2. Military (Militer) 3. Inland Water (Perairan Pedalaman) 4. Coastal Zone Management (Pengelolaan Kawasan Pesisir) 5. Offshore Seismic (Survei Seismik Lepas Pantai) 6. Offshore Construction (Konstruksi Lepas Pantai) 7. Remote Sensing (Penginderaan Jauh Kelautan) 7 2.2 Global Positioning System (GPS) 2.2.1 Global Positioning System (GPS) 2.2.2 Karakteristik Baseline 2.2.3 Metode Pengukuran GPS 2.2.4 Ground Control Point (GCP) 2.2.5 Independent Check Point (ICP) 2.2.6 Kesalahan Dan Bias Pada Pengamatan GPS 2.3 Kerangka Kontrol Horizontal (KKH) 2.3.1 Poligon 2.3.2 Bentuk Poligon 2.3.3 Formula Pengukuran Poligon 2.3.4 Pengukuran Detil 2.4 Kerangka Kontrol Vertikal (KKV) 2.4.1 Prinsip Pengukuran Beda Tinggi 2.4.2 Metode Pengukuran Beda Tinggi 2.4.3 Formula Pengukuran Beda Tinggi 2.5 Perataan Kuadrat Terkecil 2.5.1 Perataan Bersyarat 2.5.2 Perataan Parameter 2.5.3 Perataan Parameter Bersyarat 2.6 Pasang Surut 2.6.1 Definisi Pasang Surut Data pasang surut air laut memiliki peran penting dalam mengimplementasikan Undang-Undang Republik Indonesia Nomor 27 Tahun 2007 tentang pengelolaan Wilayah Pesisir dan Pulau-pulau Kecil. Selain itu, data pasang-surut air laut sangat diperlukan dalam penentuan garis pantai dan garis pelaksanaan survei bathimetri. Data pasang surut air laut digunakan untuk memberikan koreksi dalam penentuan kedalaman dengan echosounder. Pasang surut merupakan salah satu gejala alam yang nyata di permukaan laut, yaitu berupa gerakan vertikal (naik dan turun) secaara teratur dan berulang-ulang dari seluruh partikel massa air laut sampai bagian terdalam dari dasar laut (Dewi Surinati). Pasang surut air laut adalah fluktasi muka air laut yang disebabkan oleh gaya tarik bendaa-benda langit terutama matahari dan bulan terhadap masa air laut bumi. Dalam hal ini bulan lebih berpengaruh terhadap pasang surut air laut, dibandingkan dengan matahari. Hal ini dikarenakan jarak antara bulan dengan Bumi relative leih dekat jika dibandingkan dengan jarak antara Bumi dan Matahari. (MASPARI) Menurut Ongkosongo (1989), pembentukan pasang surut air laut dipengaruhi oleh beberapa gerakan, diantaranya ialah : Revolusi bulan terhadap bumi, dimana orbitnya berbentuk elips dan memerlukan periode untuk menyelesaikan revolusi itu selama 29,5 hari. Revolusi bumi terhadap matahari dengan orbitnya berbentuk elips, periode yang diperlukan adalah 365,25 hari. 8 Perputaran bumi terhadap sumbunya sendiri, periode yang diperlukan untuk gerakan ini adalah 24 jam. Dari hasil pengolahan pengamatan pasang surut air laut akan didapatkan beberapa komponen. Komponen pasang surut merupakan uraian dari resultan gaya penggerak pasang surut. Resultan gaya pasut adalah resultan dari gaya tarik menarik antara bumi, bulan dan matahari. Komponen pasut dapat dianalisa dengan metode harmonik, dengan dasar bahwa pasut yang terjadi adalah superposisi atau penjumlahan dari berbagai komponen pasut. Berikut adalah komponen-komponen yang dimaksut. Tabel __. Komponen Pasang Surut Komponen Utama bulan Utama matahari Bulan akibat variasi bulanan jarak bumibulan Matahari –bulan akibat perubahan sudut deklinasi matahari-bulan Matahari-bulan Utama – bulan Utama – matahari Utama – bulan Matahari - bulan Simbol M2 S2 N2 Keterangan Pasang surut semi diurnal K2 K1 O1 P1 M4 MS4 Pasang surut diurnal Perairan dangkal 2.6.2 Tipe Pasang Surut Secara umum pasang surut air laut dapat dibedakan menjadi empat tipe, yaitu : Pasang surut harian tunggal (diurnal tide) Merupakan pasang surut dimana dalam satu hari terjadi satu kali air pasang dan satu kali air surut. Periode pasang surut tipe ini adalah 24 jam 50 menit. Pasang surut ini biasanya terdapat di Selat Karimata. 9 Gambar __. Grafik Diurnal Tide Pasang surut harian ganda (Semi Diurnal Tide) Merupakan pasang surut yang terjadi dua kali pasang dan dua kali surut yang tingginya hampir sama dalam satu hari. Periode pasang surut rata-rata adalah 12 jam 24 menit. Pasang surut ini biasanya terjadi di Selat Malaka hingga Laut Andaman. Gambar __. Grafik Semi Diurnal Tide Pasang surut campuran condong harian tunggal (Mixed Tide, Prevailing Diurnal) Merupakan pasang surut yang tiap harinya terjadi satu kali pasang dan satu kali surut tetapi terkadang dengan dua kali pasang dan dua kali surut yang sangat berbeda dalam tinggi dan waktu. Pasang surut ini biasanya terdapat di Pantai Selatan Kalimantan dan Pantai Utara Jawa Barat Gambar __. Grafik Mixed Tide, Prevailing Diurnal Pasang surut campuran condong harian ganda (Mixed Tide, Prevailing Semi Diurnal) Merupakan pasut yang terjadi dua kali pasang dan dua kali surut dalam sehari tetapi terkadang terjadi satu kali pasang dan satu kali. Surut dengan memiliki tinggi dan waktu yang berbeda. Pasang surut ini terdapat di Pantai Selatan Jawa dan Indonesia Bagian Timur 10 Gambar __. Grafik Mixed Tide, Prevailing Semi Diurnal 2.6.3 Penentuan Referensi Pasang Surut Dalam pengamatan pasang surut air laut akan didapatkan beberapa referensi ketinggian. Referensi ketinggian ini dapat digunakan untuk berbagai keperluan seperti referensi ketinggian pada peta, serta sebagai pedoman dalam pembuatan atau perencanaan pembangunan pesisir. Setidaknya terdapat tujuh referensi ketinggian yang didapat, yaiti : Muka air tinggi ( High Water Level ), muka air tertinggi yang dicapai pada saat air pasang dalam satu siklus pasang surut. Muka air rendah ( Low Water Level ), kedudukan air terendah yang dicapai pada saat air surut dalam satu siklus pasang surut. Muka air tinggi rerata ( Mean High Water Level, MHWL ), adalah rerata dari muka air tinggi pada periode tertentu. Muka air rendah rerata ( Mean Low Water Level, MLWL ), adalah rerata dari muka air rendah selama periode tertentu. Muka air laut rerata ( Mean Sea Level, MSL ), adalah muka air rerata antara muka air tinggi rerata dan muka air rendah rerata. 2.7 Survei Batimetri Survei batimetri sering disebut dengan istilah pemeruman yaitu proses dan aktivitas yang ditujukan untuk memperoleh gambaran bentuk permukaan dasar perairan (seabed surface). Bentuk permukaan yang dimaksud hanya sebatas pada konfigurasinya saja, tidak sampai pada kandungan materialnya ataupun biota yang tumbuh di atasnya (Poerbandono dan Djunarsjah, 2005). Dalam survei batimetri salah satu ketentuan teknis yang berlaku internasional adalah ketentuan IHO (International Hydrographic Organization). Peta batimetri harus memiliki sebuah datum vertikal, Datum vertikal adalah referensi sebagai dasar pengukuran ketinggian atau kedalaman. Peta batimetri umumnya menggunakan suatu bidang air rendah (Chart Datum) sebagai bidang referensi tinggi, sehingga semua kedalaman yang diperhatikan pada peta laut mengacu pada pasut rendah (low tide). 11 2.7.1 Pemeruman Pemeruman adalah proses dan aktivitas yang ditujukan untuk memperoleh gambaran bentuk permukaan (topografi) dasar perairan (seabed surface). Proses penggambaran dasar perairan tersebut (sejak pengukuran, pengolahan hingga visualisasi) disebut dengan survei batimetri. Model batimetri diperoleh dengan menginterpolasikan titik-titik pengukuran kedalaman bergantung pada skala model yang hendak dibuat. Titik-titik pengukuran kedalaman berada pada lajur-lajur pengukuran kedalaman yang disebut sebagai lajur perum (sounding line). Jarak antar titik-titik fix perum pada suatu lajur pemeruman setidak-tidaknya sama dengan atau lebih rapat dari interval lajur perum. Pengukuran kedalaman dilakukan pada titik-titik yang dipilih untuk mewakili keseluruhan daerah yang akan dipetakan. Pada titik-titik tersebut juga dilakukan pengukuran untuk penentuan posisi. Titik-titik tempat dilakukannya pengukuran untuk penentuan posisi dan kedalaman disebut sebagai titik fix perum. Dalam survei batimetri pengukuran kedalaman titik pemeruman (h) dilakukan secara simultan dengan pengukuran posisi horizontal titik-titik pemeruman (X,Y). Pengukuran kedalaman dilakukan dengan alat ukur kedalaman yang menggunakan gelombang akustik yaitu alat echosounder. Metode akuisisi data yang diperoleh dari pengukuran dengan alat echosounder adalah selang waktu gelombang mulai dipancarkan dan gelombang kembali diterima oleh alat, sehingga diperoleh data kedalaman yang dicatat alat perekam merupakan fungsi selang waktu. Sebagaimana diuraikan dalam persamaan I.25 untuk menentukan kedalaman laut yang terukur pada saat pengukuran dapat diketahui dengan persamaan I.25 (Poerbandono dan Djunarsjah 2005). Keterangan: d v(t) t1 dan t2 : kedalaman laut yang terukur pada saat pengukuran, : cepat rambat gelombang suara di air, : waktu pada saat gelombang suara dipancarkan dan saat penerimaan gelombang pantulnya. Penentuan posisi titik pemeruman dalam survei batimetri merupakan peran yang sangat penting. Beberapa metode dalam penentuan posisi horizontal (X,Y) titiktitik pemeruman dengan gelombang elektromagnetik (satellite receiver) yang dipasang pada kapal survei. Metode yang digunakan dapat berupa metode GPS absolut maupun metode differential GPS (Poerbandono 2005). Pada pekerjaan ini penentuan posisi horizontal menggunakan sistem satelit yang disebut dengan DGPS (Differential Global Positioning System). Faktor lain yang mempengaruhi pengukuran batimetri adalah dinamika media air laut berupa pasang surut laut. Pada pengukuran kedalaman dasar laut perlu dilakukan tiga pengukuran sekaligus pada waktu yang bersamaan yaitu pengukuran kedalaman, pengukuran posisi alat ukur kedalaman (posisi horizontal) dan pengukuran pasang surut. 12 Dari ketiga data tersebut akan menjadi informasi kedalaman pada posisi fix terhadap suatu bidang referensi. 2.7.1.1 Desain Lajur Perum Pemeruman dilakukan dengan membuat profil (potongan) pengukuran kedalaman. Lajur perum dapat berbentuk garis-garis lurus, lingkaran-lingkaran konsentrik, atau lainnya sesuai metode yang digunakan untuk penentuan posisi titik titik fiks perumnya. Lajur-lajur perum didesain sedemikian rupa sehingga memungkinkan pendeteksian perubahan kedalaman yang lebih ekstrim. Untuk itu, desain lajur-lajur perum harus memperhatikan kecenderungan bentuk dan topografi pantai sekitar perairan yang akan disurvei. Agar mampu mendeteksi perubahan kedalaman yang lebih ekstrem lajur perum dipilih dengan arah yang tegak lurus terhadap kecenderungan arah garis pantai. ( Eka Djunasjah, 2005). Berdasarkan fungsinya lajur perum dapat dibedakan menjadi 3 macam (Soeprapto, 2001) yaitu: lajur perum utama, lajur perum silang, dan lajur perum tambahan/investigasi. 2.7.1.1.1 Lajur Perum Utama Yaitu lajur perum yang direncanakan sedemikian rupa sehingga seluruh daerah survei dapat tercakup dan dapat digambarkan bentuk dasar perairannya (Soeprapto, 2001).Cara menentukan lajur perum utama dapat dilihat pada Gambar I.2, yaitu dengan ketentuan jarak antara lajur perum utama harus dipilih dengan memberikan prioritas terhadap puncak, lembah dan titik-titik perubahan kemiringan. Gambar 2.3. Penentuan Lajur Perum Utama (Harmoko, 2003) Lajur perum utama mempunyai bentuk-bentuk antara lain (Harmoko, 2003): a. Lajur perum lurus sejajar b. Lajur perum lurus menyebar 13 c. Lajur perum berbentuk busur lingkaran kosentrik d. Lajur perum berbentuk lengkungan hiperbola kofokus Gambar 2.4 Penentuan Lajur Lurus Sejajar (Harmoko, 2003) Pada Gambar 2.4. menggambarkan rencana lajur yang dibuat saat kapal melakukan pemeruman dengan bentuk lajur lurus sejajar. Kapal mulai melakukan pemeruman dari nomor 1 ke 2, 2 ke 3, dan seterusnya, kemudian angka menunjukan fix position kapal saat survei. Gambar 2.5. Lajur Perum Lurus Menyebar (Harmoko, 2003) Pada Gambar 2.5. menunjukan lajur rencana kapal yang melakukan survei dengan bentuk lajur lurus menyebar. Bentuk lajur ini cenderung mengikuti bentuk garis pantai daerah survei. Kapal mulai melakukan 14 pemeruman dari nomor 1 ke 2, 2 ke 3, dan seterusnya, kemudian angka menunjukan fix position kapal saat survei. Gambar 2.6 Lajur Perum Berbentuk Busur Lingkaran Kosentrik(Harmoko, 2003) Pada Gambar 2.6. menggambarkan rencana lajur saat kapal melakukan pemeruman dengan bentuk lajur menyerupai busur lingkaran. Kapal mulai melakukan pemeruman dari nomor 1 ke 2, 2 ke 3, dan seterusnya, kemudian angka menunjukan fix position kapal saat survei. Gambar 2.7. Lajur Perum Berbentuk Lengkungan Hiperbola Kofokus (Harmoko, 2003) Pada Gambar 2.7. menggambarkan rencana lajur saat kapal melakukan pemeruman dengan bentuk lajur lengkungan hiperbola kofokus. Angka 1,2,3 dan seterusnya menunjukan fix position kapal saat survei. 15 Gambar 2.8. Lajur Perum Berbentuk Silang(Harmoko, 2003) 2.7.1.1.2 Lajur Perum Silang Yaitu lajur perum yang dijalankan memotong atau menyilang lajur perum utama.Tujuan diadakannya pemeruman silang ialah untuk memeriksa atau mendeteksi ada tidaknya kesalahan hasil pengukuran (baik posisi horizontal maupun kedalaman ukuran) pada sistem lajur utama. 2.7.1.1.3 Lajur Perum Tambahan/Investigasi Yaitu lajur perum yang dijalankan apabila ada kelainan-kelainan (misalnya: adanya perubahan kedalaman yang mendadak, pusaran arus) atau mengisi bila terjadi gap (kekosongan akibat penyimpangan lajur perum utama) yang terdapat antara 2 lajur yang bersebelahan pada sistem lajur perum utama (Soeprapto, 1999). 2.7.2 Single Beam Echosounder (SBES) Single beam echosounder (SBES) adalah alat ukur kedalaman air yang menggunakan pancaran tunggal sebagai pengirim dan pengiriman sinyal gelombang suara. Pada dasarnya singlebeam echosounder digunakan untuk membuat peta 3D yang dikombinasikan dengan permukaan fisik lokasi dasar laut yang pada umumnya digunakan untuk melakukan survei pendahuluan sebelum penggunaan multibeam sonar. Single beam echosounder terdiri dari 2 jenis: Single frequency merupakan singlebeam echosounder yang menggunakan satu frekuensi saja yaitu high frequency Dual frequency merupakan singlebeam echosounder yang menggunakan dua frekuensi yaitu high frequency dan low frequency. High frequency lebih memberikan kedalaman yang akurat dalam hubungannya dengan keselamatan pelayaran, 16 sedangkan low frequency mampu melakukan penetrasi hingga ke lumpur dasar lautnya (sangat dalam) sehingga tidak aman untuk pelayaran. Gambar 2.9. Prinsip Kerja Single Beam Echosounder 2.7.2.1 Komponen SBES Pengukuran kedalaman dengan single beam echosounder terdiri atas 4 komponen: 1. Transducer 2. Receiver 3. Control 4. System display Gambar 2.9. Komponen Single Beam Echosounder Sistem batimetri dengan menggunakan singlebeam secara umum mempunyai susunan transceiver (tranducer/reciever) yang terpasang pada lambung kapal atau sisi bantalan pada kapal. Sistem ini mengukur kedalaman air secara langsung dari kapal penyelidikan. Transciever yang terpasang pada lambung kapal mengirimkan pulsa akustik dengan frekuensi tinggi yang terkandung dalam beam (gelombang suara) secara langsung menyusuri bawah kolom air. Energi akustik memantulkan sampai dasar laut dari kapal dan diterima kembali oleh transceiver. Transceiver terdiri dari sebuah transmitter yang mempunyai fungsi sebagai pengontrol panjang gelombang pulsa yang dipancarkan dan menyediakan tenaga elektrik untuk frekuensi yang diberikan. 17 Transmitter ini menerima secara berulang-ulang dalam kecepatan yang tinggi, sampai pada orde kecepatan milisekon. Perekaman kedalaman air secara berkesinambungan dari bawah kapal menghasilkan ukuran kedalaman beresolusi tinggi sepanjang lajur yang disurvei. Informasi tambahan seperti heave (gerakan naik turunnya kapal yang disebabkan oleh gaya pengaruh air laut), pitch (gerakan kapal ke arah depan (mengangguk) berpusat di titik tengah kapal), dan roll (gerakan kapal ke arah sisi-sisinya (lambung kapal) atau pada sumbu memanjang) dari sebuah kapal dapat diukur oleh sebuah alat dengan nama Motion Reference Unit (MRU), yang juga digunakan untuk koreksi posisi pengukuran kedalaman selama proses berlangsung. Gambar 2.11. Proses Singlebeam Echosounder (Bambang Triatmodjo, 2008) 2.7.2.2 Kelebihan dan Kekurangan SBES Kelebihan singlebeam echosounder adalah: Relatif mudah untuk digunakan. Mampu menghasilkan informasi kedalaman sepanjang garis lajur yang dilalui oleh kapal. Ketika sonar memiliki sudut beam yang sempit maka akan menghasilkan keakuratan posisi yang cukup tinggi dalam pengukuran kedalamannya. Kekurangan singlebeam echosounder adalah: Dalam hal kecepatan survei, singlebeam echosounder bukan merupakan instrumen pengukuran yang efisien waktu karena dalam sekali pengukuran hanya mendapatkan satu ukuran kedalaman. Ada fitur-fitur dasar laut yang tidak terekam antara lajur per lajur sebagai garis tracking perekaman, yang mana ada ruang sekitar 10 sampai 100 meter yang tidak terlihat oleh sistem ini. Proses pemetaannya membutuhkan waktu yang lama. 2.7.2.3 Kalibrasi dan Koreksi SBES Hampir semua sumber kesalahan merupakan kesalahan sistematik, sehingga dapat didesain cara mengatasinya untuk mendapatkan hasil pengukuran yang benar. Cara yang efektif untuk menjaga ketelitian pemeruman adalah dengan melakukan kalibrasi menggunakan cakra tera (bar check). Kalibrasi ini sangat membantu untuk mendapatkan ukuran kedalaman yang benar akibat beberapa sumber kesalahan 18 sekaligus. Bar check terbuat dari lempeng logam berbentuk lingkaran atau segi empat yang digantungkan pada tali atau rantai berskala dan diletakkan di bawah transducer. Tali atau rantai berskala dipakai sebagai pembanding hasil pengukuran dengan alat perum gema. Perbandingan pengukuran kedalaman dilakukan untuk setiap perubahan kedalaman, mulai dari kedalaman 0 hingga kedalaman maksimum yang akan diperum dengan interval 1 m. Kalibrasi dengan bar check dilakukan setelah pengesetan pulsa awal nol dilakukan (goresan saat pena stilus mendapatkan arus listrik dari gelombang pancar ditepatkan pada skala 0) dan dimulai dari kedalaman tali skala bar check 1 meter. Setelah itu, kedudukan bar check diturunkan dengan selang satu meter hingga kedalaman maksimum daerah yang akan diperum. Selanjutnya, dari kedalaman maksimum, tali bar check ditarik dengan selang 1 meter hingga kembali pada kedudukan 1 meter. Kalibrasi dengan bar check harus dilakukan langsung sebelum dan setelah pemeruman dilakukan pada satu sesi atau satu hari pemeruman. Sebelum pemeruman dilakukan, dipilih suatu kawasan air yang relatif tenang dan dalam dengan kapal yang berhenti untuk kalibrasi awal. Pemilihan lokasi bar check pada air tenang dilakukan agar lempeng logam tidak melayang karena arus, sehingga tetap berada di bawah transducer. Kedalaman tempat kalibrasi juga penting untuk memperoleh kedalaman kalibrasi yang maksimum. Data ukuran kedalaman yang telah dikoreksi dengan kalibrasi menggunakan bar check dapat dianggap terbebas dari sumber kesalahan karena sifat perambatan gelombang pada medium air laut. Pengukuran bar check harus dilakukan paling tidak 2x sebelum dan 2x sesudah. Kemudian untuk hasil pengukuran bar check harus dibandingkan dengan hasil pengukuran SVP untuk mengecek apakah perhitungan sudah benar. Bar check digunakan apabila pengukuran dilakukan di perairan yang dangkal dengan kedalaman < 10 m. Selain itu perlu dilakukan pengukuran pasut, tetapi pengukuran pasut sangat opsional karena di laut bebas gelombangnya sangat kecil, pengukuran pasut biasanya menggunakan 2 alat, yaitu Tide Gauge atau Tide Prediction untuk mengolah datanya dapat dihitung dengan rumus : 𝐇𝐭𝐞𝐫𝐤𝐨𝐫𝐞𝐤𝐬𝐢 = 𝐇𝐞𝐜𝐡𝐨𝐬𝐨𝐮𝐧𝐝𝐞𝐫 + 𝐝𝐫𝐚𝐟𝐭 𝐭𝐫𝐚𝐧𝐬𝐝𝐮𝐜𝐞𝐫 + 𝐤𝐨𝐫𝐞𝐤𝐬𝐢 𝐛𝐚𝐫𝐜𝐡𝐞𝐜𝐤...................(I.2) Gambar 2.12. Koreksi Bar Check Selain kalibrasi dengan bar check, data hasil pengukuran kedalaman harus diberi koreksi-koreksi karena kesalahan akibat: 1. Sarat transducer, dengan mengukur kedudukan (jarak vertikal) permukaan transduser terhadap bidang permukaan laut. 19 2. Settlement dan squat (jika dianggap berarti), dengan membandingkan kedudukan vertikal transducer terhadap permukaan air saat kapal berjalan. 3. Pasut, dengan koreksi tinggi muka air laut sesaat (sounding datum) terhadap tinggi bidang referensi vertikal (MSL dan chart datum) yang diperoleh dari pengolahan data pengamatan pasut. 2.7.3 Multi Beam Echosounder (MBES) Multi beam echosounder (MBES) merupakan suatu instrumen hidro-akustik yang menggunakan prinsip yang sama dengan single beam namun perbedaannya pada penggunaan multibeam jumlah beam yang dipancarkan lebih dari satu dalam satu kali pancar. Berbeda dengan Side Scan Sonar pola pancaran yang dimiliki MBES ini melebar dan melintang terhadap badan kapal. Setiap beam memancarkan satu pulsa suara dan memiliki penerimanya masing-masing. Saat kapal bergerak hasil sapuan multibeam tersebut menghasilkan suatu luasan area permukaan dasar laut (Moustier, 2005). Transducer yang terdapat di dalam multibeam sonar terdiri dari serangkaian elemen yang memancarkan pulsa suara dalam sudut yang berbeda. Biasanya hanya satu beam yang ditransmisikan tetapi menghasilkan banyak pantulan energi dari masing-masing pulsa suara yang ditransmisikan. Kemampuan setiap elemen transducer menerima kembali pulsa suara yang dipantulkan tergantung kepada metode kalibrasi terhadap gerak kapal yang diterapkan (Hammerstad, 2000). MBES ini memiliki ketelitian yang sangat baik dalam pengukuran kedalaman. Selain memiliki ketelitian yang sangat baik, keuntungan dalam penggunaan MBES ini adalah biaya yang efektif karena akan diperoleh peta batimetri detail dengan cakupan area yang sangat luas (IHO, 2006). Pada umumnya MBES menggunakan teknik interferometrik untuk mendeteksi arah datangnya gelombang pantul sebagai fungsi dari waktu.Pendeteksian interferometrik digunakan untuk menentukan sudut sinyal datang. Dengan menggunakan akumulasi sinyal akustik yang diterima pada dua array yang terpisah, suatu pola interferensi akan terbentuk. Pola ini menunjukkan hubungan fase tiap sinyal yang diterima. Berdasarkan hubungan yang ada, suatu arah akan dapat ditentukan. Bila informasi ini dikombinasikan dengan jarak, akan dihasilkan data kedalaman (Anonim, 2010). Gambar 2.13. Multi Beam Echosounder 20 2.7.3.1 Komponen MBES Pada MBES merujuk pada sekumpulan sensor dipasang pada suatu wahana survei yang digunakan secara bersamaan untuk mendapatkan pengukuran kedalaman seketika. Instrumentasi dasar tersebut antara lain: 1. Transducer 2. Unit Kontrol dan Integrasi 3. Unit Referensi Vertikal (sensor roll, pitch, yaw dan heave) 4. Sound Velocimeters 5. Positioning System 6. Sensor Heading Gambar 2.14. Komponen MBES Kelengkapan lainnya seperti monitor dan alat (software) akusisi biasanya digunakan untuk memantau hasil secara langsung (real time) dan penilaian kualitas survei. Unit untuk akusisi dan mencatat data (logging) juga terintegrasi dengan sistem. 2.7.3.2 Kelebihan dan Kekurangan MBES Keuntungan penggunaan multi beam adalah sebagai berikut: Multi beam echo sounder dapat menghasilkan data batimetri dengan resolusi tinggi (0,1 meter akurasi vertikal dan kurang dari 1 meter akurasi horizontalnya) (Urick, 1983). Secara efektif dalam sekali survei multibeam mampu memetakan beberapa lokasi dasar laut yang berbeda dalam sekali waktu. Lokasilokasi dasar laut tersebut kemudian disusun menjadi sebuah peta area dasar laut yang kontinyu biasanya arah titik-titik pemerumannya tergak lurus terhadap jalannya kapal yang disebut swath yang biasanya berukuran 120-160 derajat. Selain menghasilkan peta bathimetri, multi beam juga mampu menghasilkan gambar backscatter daerah yang disurvei. Kekurangan penggunaan multi beam echosounder adalah sebagai berikut: Pengukuran dengan multi beam echosounder membutuhkan biaya yang jauh lebih mahal. 21 Pengukuran dengan multi beam echosounder lebih kompleks. 2.7.3.3 Prinsip Kerja MBES Prinsip operasi alat ini secara umum adalah berdasar pada pancaran pulsa yang dipancarkan secara langsung ke arah dasar laut dan setelah itu energi akustik dipantulkan kembali dari dasar laut (seabed). Semakin dekat obyeknya dengan sumber maka intensitasnya pun semakin kuat. Gelombang akustik yang dipantulkan dari dasar laut selanjutnya dianalisis oleh transducer sehingga dapat dibedakan gelombang pantul yang datang dari arah yang berbeda. Untuk mendeteksi arah datangnya sinyal yang dipantulkan oleh dasar laut, transducer pada MBES menggunakan tiga metode pendeteksian, yaitu pendeteksian amplitudo, fase dan interferometrik (sudut). Pada prinsipnya pengukuran multi beam echosounder menggunakan pengukuran selisih fase pulsa (jenis pengamatan yang digunakan adalah metode pulsa). Untuk teknik pengukuran yang digunakan selisih fase pulsa ini yaitu fungsi dari selisih pulsa waktu pemancaran dan penerimaan pulsa akustik serta sudut datang dari sinyal tiap-tiap transducer. 2.7.4 Side Scan Sonar (SSS) Side scan sonar merupakan peralatan observasi dasar laut yang dapat memancarkan beam pada kedua sisi bagiannya secara horizontal. Side scan sonar memancarkan pulsa suara pada kisaran frekuensi 100-500 kHz. Semakin besar nilai frekuensi maka resolusi data yang dihasilkan akan semakin tinggi akan tetapi area cakupannya semakin sempit (MacLennan dan Simmonds, 2005). Side scan sonar terutama dirancang untuk memberikan "gambar akustik" dari dasar laut, dengan resolusi tinggi. Selain itu, side scan sonar adalah alat yang berguna untuk deteksi target, misalnya kecelakaan kapal, pipa dan kabel. 2.7.4.1 Komponen SSS Sebuah sistem side scan sonar terdiri dari komponen-komponen sebagai berikut: Alat perekam (recorder), Sensor bawah air (towfish dengan transducer) Gambar 2.15. Komponen SSS 2.7.4.2 Kelebihan dan Kekurangan SSS Kelebihan side scan sonar meliputi: 22 Penggunan sistem dual frekuensi yang memungkinkan dapat bekerja secara simultan dengan resolusi yang berbeda dan biasanya digunakan pada perairan yang relatif dangkal (Lurton, 2002). Frekuensi yang digunakan bervariasi sehingga memungkinkan untuk membatasi panjang array di bawah satu meter dengan jangkauan mencapai kisaran ratusan meter. Sinyal yang dipancarkan memiliki durasi sekitar 0,1 meter/detik, sehingga resolusi spasial dapat mencapai 0,1 meter (Lurton, 2002) Mampu menghasilkan citra dasar laut yang dapat digunakan untuk mendeteksi obyek yang dapat diperkirakan ketinggiannya menggunakan shadows. Kekurangan dari side scan sonar adalah: Kebutuhan untuk memastikan cakupan yang lengkap dari daerah yang disurvei karena adanya kesenjangan kolom air di bawah towfish. Adanya distorsi data side scan sonar karena ketidakstabilan towfish, variasi kecepatan dalam kapal survei, dan jangkauan kompresi data karena ketinggian towfish (distorsi slant-range). Ketidakstabilan towfish diminimalisir dengan konfigurasi towing yang digunakan. Variasi kecepatan dan distorsi slant-range dapat dikoreksi dengan sistem side scan sonar digital (Fish and Carr, 1990). 2.7.4.3 Prinsip Kerja SSS Pulsa-pulsa listrik tersebut diubah menjadi energi mekanik. Hasil dari perubahan tersebut berupa sinyal ultrasonik yang kemudian dipancarkan ke dasar laut. Sinyal-sinyal tersebut dipantulkan kembali oleh dasar laut dan diterima kembali ke transducer. Interval waktu dari pengembalian sinyal tersebut tergantung dari jarak antara transducer dengan titik pemantulannya, selain itu besarnya amplitudo dan frekuensi sinyal ultrasonik juga berbeda sesuai dengan jenis objek yang memantulkan sinyal ultrasonik tersebut. Sinyal ultrasonik yang diterima oleh transducer diubah kembali menjadi pulsa-pulsa listrik dan diteruskan ke recorder untuk proses perekaman. Hasil rekaman yang terdapat pada kertas recorder kemudian diinterpretasikan jenis objek di dasar laut atau keadaan topografi di dasar laut Gelombang akustik dipantulkan oleh sonar berinteraksi dengan dasar laut dan sebagian besar energi tercermin specularly. Jarak tempuh dari transducer ke target dasar laut disebut jarak miring. Sudut antara gelombang datang dan dasar laut disebut sudut datang. Sudut pengembalian adalah 90°- sudut datang, yaitu sudut antara gelombang datang dan normal lokal ke dasar laut (Blondel dan Murton, 1997). 23 Gambar 2.16. Prinsip Kerja SSS 2.8 Oseanografi 2.8.1 Arus Laut 2.8.2 Sedimen 2.8.3 Salinitas 2.8.4 Diagram Mawar 2.9 Foto Format Kecil 2.9.1 Fotogrametri 2.9.2 Desain Jalur Terbang 2.9.3 Orientasi Foto 2.9.4 Orthorektifikasi 2.9.5 Root Mean Square 2.9.6 Ground Sampling Distance 2.10 Toponimi 2.10.1 Definisi Toponimi 2.10.2 Desa 2.10.3 Gazetir 2.10.4 Landmark 2.10.5 Data Kependudukan 2.10.6 Metode Sampling 2.10.7 Pengolahan Data Survei Statistik 2.11 Peta 2.11.1 2.11.2 2.11.3 2.11.4 2.11.5 2.11.6 Definisi Peta Peta Potensi Wisata Peta Desa Peta Bathimetri Teknik Penyajian Peta Software Yang Digunakan BAB 3. METODOLOGI PELAKSANAAN 3.1 Lokasi Dan Waktu Pelaksanaan 3.2 Alat Dan Bahan 3.2.1 GPS 3.2.2 Shoreline 3.2.3 Pasut 3.2.4 Oseanografi 3.2.5 Pemeruman Adapun alat dan bahan yang digunakan pada praktikum survei batimetri antara lain sebagai berikut. 24 SBES No Alat dan Bahan 1 SingleBeam Echo Sounder Hi – Target HD 370 Jumlah 1 buah 2 3 4 GPS SBAS Topcon Hiper Pro Power Supply (1) Kabel Power (1) Kabel VGA (1) Batang Besi (1) 1 buah Transducer Kabel ke GPS SBAS (1) Kabel Power ke Aki (1) Kabel Power ke Listrik (1) Kabel USB (1) Kabel Ethemet (1) Batang Transducer (1) Garmin Echomap 725 V 1 buah 1 buah 5 Barcheck 1 buah 25 Gambar 6 Roll Meter 30m 2 buah 7 Papan Jalan 1 buah 8 Form Ukur 3 Lembar MBES No Alat dan Bahan 1 MultiBeam Echo Sounder WASSP Jumlah 1 buah 2 GPS Hemisphere + Kabel Splitter 1 buah 3 Transducer Kabel Batang Transducer (4) Plat Besi Transducer 1 buah 26 Gambar 4 Genset Atomic Power 1 buah 5 UPS Prolink 1 buah 6 Stavolt 1500 1 buah 7 8 Kabel ke PC + LAN DRX Dongle 1 buah 1 buah 9 Sensor Box WASSP / IMU 1 buah 10 Inverter 1 buah 11 Laptop + Monitor 1 buah 12 13 Tali Orange Tali Crack 1 buah 1 buah 27 14 ToolBox 1 buah 15 Kotak Kunci Pas 1 buah 16 Papan Jalan 1 buah 17 Form Ukur 3 Lembar 3.2.6 Toponimi 3.2.7 Foto Udara 3.3 Jadwal Pelaksanaan 3.4 Metode Pelaksanaan 3.4.1 GPS 3.4.2 Shoreline 3.4.3 Pasut 3.4.4 Oseanografi 28 3.4.5 Pemeruman MULAI PENGAMATAN PASANG PENGAMATAN PASANG AKUISISI DATA SINGLE BEAM ECHOSOUNDER AKUISISI DATA MULTI BEAM ECHOSOUNDER PENGUKURAN DRAFT PEREKAMAN DMS VERIFIKASI SIDE SCAN KOREKSI BARCHECK PENGAMATAN SVP/CTD OBSERVASI SIDE SCAN KOREKSI HEAVE , KALIBRASI PITCH, ROLL PENGUKURAN KEDALAMAN DENGAN SBES PENGUKURAN KEDALAMAN DENGAN MBES RAW DATA SONAR RAW DATA RAW DATA KONTROL KUALITAS AKUISISI DATA SIDE SCAN KONTROL KUALITAS Tidak Ya Ya DEMOBILISASI SELESAI 29 KONTROL Tidak KUALITAS Ya Tidak Gambar 3. Diagram Alir Pemeruman Adapun tahapan praktikum pemeruman dalam survei hidrografi ini adalah sebagai berikut. Pemeruman atau sounding dilakukan dengan membuat profil (potongan) pengukuran kedalaman dengan menggunakan alat echosounder dan GPS map sounder dengan titik fix perum diamati sesuai dengan lajur pemeruman yang telah dibuat. Pada praktikum kali ini, lajur perum dibuat dengan panjang jalur 2 km dan lebar jalur 500 m terhadap garis pantai. Penjelasan diagram alir pemeruman adalah sebagai berikut: 1. Tahapan Pemeruman Tahapan pelaksanaan praktikum pemeruman adalah sebagai berikut : A. Kapal SBES 1) Pasang alat-alat yang akan digunakan di kapal a. Siapkan kabel penghubung antara depth recorder dengan accu dan transduser. b. Pasang transduser pada pipa penyangga dan kencangkan transduser pada pipa penyangga dengan baut. c. Pasang dudukan pipa penyangga di lambung kapal dengan kokoh supaya agar transducer terpasang kokoh dan tidak goyah oleh arus dan gelombang laut. d. Pasang antena GPS map sounder di atas tiang penyangga transduser. e. Tempatkan depth recorder pada tempat yang aman di perahu, pastikan Power dalam keadaan Off. f. Hubungkan kabel transduser dengan recorder di Transducer dengan accu. g. Atur alat dept recorder : Tekan tombol Power menghidupkan alat. Tekan tombol Date untuk mengatur waktu ( tanggal dan jam ). Tekan tombol Range 1x untuk mengatur tingkat kedalaman Tekan tombol Range 2x untuk mengatur fase Tekan tombol Offset untuk mengatur kedalaman tranduser Tekan tombol Gain untuk mengatur tingkat kecerahan grafik pada kertas fax (echogram) Buka tutup bagian depan dan putar stylus belt satu putaran penuh sehingga stylus terlihat melintasi 1 dan Enter untuk echogram dengan baik. Setelah semua lancar tutup kembali penutup depan dan kunci. Nyalakan recorder dengan menempatkan On pada saklar Power. 2) Dianjurkan dilakukan pengukuran dengan bar-check untuk memastikan bahwa data kedalaman yang terekam secara digital telah sesuai dengan data kedalaman bar-check dan data kedalaman sudah sesuai dengan bacaan yang tampil dalam echogram. 3) Siapkan posisi perahu pada jalur perum yang telah direncanakan. 4) Lakukan pemeruman dengan aba-aba dari salah satu orang di perahu. 5) Pada setiap titik fix perum, akan diberikan aba-aba ”fix”, dan operator akan menekan tombol marker pada single beam echosounder serta mencatat nomor titik pada kertas fax (echogram). 6) Pada GPS map sounder, ketika aba-aba ”fix” maka operator akan menekan tombol Enter hingga muncul posisi perahu dalam lintang dan bujur. 7) Lakukan prosedur yang sama pada semua titik fix perum hingga jalur terakhir. B. Kapal MBES 1) Pasang alat-alat yang akan digunakan di kapal Pasang terlebih dahulu transducer dengan transducernya batang Lakukan penyetelan batang-batang transducer pada kapal. Pastikan batang transducer tersebut kokoh dengan kapal, sehingga meminimalisir pergerakan transducer (baik Multi Beam maupun Side Scan Sonar) akibat ombak, angin dsb. Pasang hemisphere. Siapkan berbagai kabel yang dibutuhkan. Posisikan alat-alat lainnya berada dalam posisi yang aman. Untuk IMU digunakan perekat agar posisi IMU tersebut fix terhadap posisi transducer Ketika semua telah terpasang dengan baik, kapal dapat dijalankan menuju jalur perum Selanjutnya, peralatan dinyalakan satu persatu dengan urutan: Generator – Stavolt – UPS 2) Pengambilan Data Dalam proses pengambilan data ataupun (sounding) baik MBES maupun SSS dilakukan pada setiap jalur perum. 2 Start record diawal setiap berada di awal jalur dan stop record di akhir setiap jalur. Saat perpindahan sari satu jalur ke jalur lain, tidak di record agar data yang dihasilkan lebih rapih. Lakukan pencatatan hal-hal pengukuran, antara lain: Draft transducer terhadap titik nol kapal (posisi IMU) Waktu mulai dan selesai pemeruman Penulisan logbook untuk catatan peristiwa yang terjadi selama proses survey berlangsung. yang penting dalam 2. Penentuan Lajur Perum Lajur perum dibuat dengan panjang jalur 2 km dan lebar jalur 600 m terhadap garis pantai. Lajur perum utama kurang lebih tegak lurus garis pantai dengan spasi 10 meter. Total jumlah jalur adalah 200 jalur. Dikaitkan dengan penggunaan alat pengukur kedalaman yaitu Echosounder yang menggunakan gelombang akustik, maka Kecepatan kapal saat melakukan pemeruman tidak lebih dari 5 knot atau sekitar 9.26 km/jam. Data hasil pengukuran disimpan dalam format ASCII(*.dat) untuk setiap lajur bersama tanggal dan waktu pengukuran, nomor lajur, serta kode operator. Data kedalaman langsung direkam dan digabungkan dengan data posisi dari hasil pengukuran titik fix perum. 3. Metode Perhitungan Pada praktikum survey hidrografi mempunyai tujuan utama untuk pembuatan peta bathimetry. Oleh karena itu data hasil dari pengukuran diolah agar menghasilkan X, Y, Z dari titik fix kedalaman, dan posisi detil dari daratan beserta garis pantai. 1) Metode Perhitungan Kedalaman Titik Fix dengan Tranduser. Data yang diperlukan untuk perhitungan: Pengamatan pasut Data sounding tranduser Tinggi BM terhadap MSL Beda tinggi dari rambu pasut ke BM Dari data di atas dapat dihitung: Interpolasi linier antara waktu dan ketinggian pasut Dtitik fix 1 = D1 + ((Wtitik fix – W1/W2-W1) x D2 – D1 180 3 Kedalaman titik dari rambu pasut Drm 1 = data sounding tranduser + Dtitik fix 1 Kedalaman titik dari BM Dbm 1 = Drm + Δh Kedalaman titik dari MSL Dmsl = Dbm + MSL 2) Metode Perhitungan Penentuan Posisi Titik Fix dengan Map Sounder atau Echosounder. Metode perhitungan kedalaman titik fix dengan menggunakan alat map sounder atau Echosounder, data – datanya telah terekam secara digital sehingga pengguna tidak perlu untuk menghitung data kedalaman dan posisi titik fix. Data yang ada di map sounder berupa: Data kedalaman Data posisi Data track kapal (perahu) Data waktu pengambilan Nomor titik fix Lajur pengukuran pada GPS Map Sounder 3.4.6 Toponimi 3.4.7 Foto Udara 4 3.5 Struktur Tim BAB 4. HASIL DAN ANALISIS 4.1 Hasil 4.1.1 Gps 4.1.2 Shoreline 4.1.3 Pasut 4.1.4 Oseanografi 4.1.5 Pemeruman 4.1.5.1 Single Beam Echosounder Berikut adalah jejak sounding yang telah dilakukan dengan menggunakan Single Beam Echosounder (lajur kuning adalah lajur perencanaan dan titik merah adalah lajur yang dilalui kapal yang dipasang SBES). Gambar 4. Lajur Perum SBES Lajur perum yang dilakukan di lapangan sudah sesuai dengan lajur perum rencana dan sudah dapat mewakili area yang disurvei secara keseluruhan meskipun jalurnya tidak selalu lurus. Lajur yang tidak lurus ini disebabkan oleh arus laut dan angin yang membuat nahkoda kapal susah memasuki jalur yang sudah direncanakan terutama saat membuat haluan ketika berbelok pindah lajur. 5 Dalam hasil pemeruman menggunakan Single Beam Echosounder, didapatkan 6893 titik (seperti pada gambar 4. diatas). Titik hasil pemeruman tersebut berada pada file .DAT yang berisi informasi yang berhubungan dengan hal-hal yang dibutuhkan untuk mengetahui kedalaman suatu perairan seperti nomor titik, waktu pengambilan titik, koordinat northing easting, dan hasil deteksi kedalaman oleh transduser. Gambar 4. Isi data .DAT Dari data tersebut, data kedalaman yang diapatkan oleh Single Beam Echosounder yang berasal dari tranduser belum mendapatkan data kedalaman sebenarnya. Untuk mendapatkan data kedalaman sebenarnya, perlu adanya koreksi dengan data pasang surut air laut yang dilakukan oleh divisi pasut. Data yang berasal dari divisi pasang surut adalah data pasang surut yang dicatat setiap 15 menit sekali. Untuk mendapatkan data pasang surut tepat pada waktu pengambilan data yang diambil oleh transduser SBES yang dimana SBES melakukan pengambilan data setiap 5 detik sekali, maka perlu dilakukan interpolasi setiap 5 detik sekali sesuai dengan data yang diambil oleh SBES tersebut. Untuk melakukan interpolasi data pasang surut air laut tersebut, kami menggunakan bantuan Microsoft Excel untuk menghitung setiap titik yang diambil dan dilakukan koreksi pada setiap titik tersebut. 6 Gambar 4. Koreksi pasut berikut menunjukkan hasil koordinat beberapa titik pemeruman yang telah dikoreksi oleh pasang surut air laut (terhadap LWS): Tabel 4. Sampel Data Sounding SBES FID Norting Easting Kedalaman FID Terkoreksi Norting Easting Kedalaman Terkoreksi 1 9239311 662565.6 6.90967 26 9239081 662468.2 6.559893 2 9239311 662565.6 6.90967 27 9239062 662460.4 6.489911 3 9239302 662561.3 6.87968 28 9239052 662456.6 6.47992 4 9239292 662557.1 6.919689 29 9239042 662453 6.44993 5 9239282 662553 6.919698 30 9239032 662449.4 6.429939 6 9239273 662548.7 6.949707 31 9239022 662445.6 6.449948 7 9239264 662544.4 6.859717 32 9239012 662441.8 6.429957 8 9239254 662540.1 6.829726 33 9239002 662438 6.329967 9 9239245 662535.8 6.809735 34 9238992 662434.1 6.349976 10 9239235 662531.4 6.849744 35 9238982 662430.3 6.349985 11 9239226 662527.1 6.779754 36 9238972 662426.7 6.319994 12 9239216 662523.3 6.819763 37 9238963 662422.7 6.310004 13 9239207 662519.3 6.819772 38 9238953 662418.8 6.340013 14 9239197 662515.2 6.799781 39 9238943 662414.9 6.310022 15 9239188 6.779791 40 9238933 662411.1 6.310031 662511 7 16 9239178 662507 6.7598 41 9238923 662407.4 6.270041 17 9239169 662502.9 6.699809 42 9238913 662403.8 6.23005 18 9239159 662498.8 6.699819 43 9238903 662400.6 6.220059 19 9239150 662494.5 6.669828 44 9238893 662397.2 6.200069 20 9239140 662490.1 6.639837 45 9238884 662393.3 6.230078 21 9239130 662486.2 6.649846 46 9238874 662389.2 6.200087 22 9239121 662482.7 6.609856 47 9238865 662384.5 6.170096 23 9239111 662478.8 6.619865 48 9238856 662379.3 6.140106 24 9239101 662475.1 6.589874 49 9238848 662373.5 6.230115 25 9239091 662471.7 6.599883 50 9238839 662367.8 6.160124 4.1.5.1.1 Hasil Lajur Pemeruman Berikut ini adalah hasil plot hasil kedalaman yang telah dikoreksi yang didapatkan dari hasil survei bathimetri yang telah dilakukan: 1) Lajur Perum yang dilewati oleh Single Beam Echosounder yang telah diplot pada ArcGIS Gambar . Lajur Perum SBES 2) Hasil kontur ArcGIS dari data plot SBES yang telah dikoreksi pasang surut air laut 8 Gambar. Kontur Laut 3) Hasil Plotting menggunakan aplikasi Surfer Gambar. Plotting pada Aplikasi Surfer Untuk hasil kedalaman laut Dalegan yang telah diukur dengan SBES, didapatkan kedalaman laut yang mengacu pada LWS adalah : Kedalaman rata-rata sebesar 5.567 meter, kedalaman terdangkal sebesar 0.447 meter, dan kedalaman laut terdalam adalah 7.737 meter 9 Pada saat pengukuran, terdapat beberapa kendala sehingga hasil pengukuran banyak yang tidak sesuai dengan desain pengukuran. Beberapa endala tersebut adalah sebagai berikut: • Hari Pertama (Kamis, 04 April 2019): - Setting alat yang terlalu lama karena pertama kali mencoba pada kapal yang sebenarnya - GPS TOPCON yang tidak bisa ter-connect dengan SBES sehingga harus menggunakan GPS bawaan dari SBES - GPS SBES yang tidak dapat digunakan setelah istirahat sholat Dhuhur sehingga pengukuran terhenti Hari kedua (Jumat, 05 April 2019): - Pengukuran baru dimulai pada sesi-2 karena GPS baru dapat digunakan setelah sholat Jumat - Data SBES tidak sinkorn dengan SSS karena SBES sempat tidak bisa digunakan Hari ketiga (Sabtu, 06 April 2019): - Pada sesi ke-1 transduser dan baling-baling kapal tersangkut pada jaring nelayan - Saat sesi ke-2 gelombang laut cukup tinggi sehingga saat melakukan pemeruman pada lajur perum silang cukup kesulitan bagi kapal untuk tetap berada pada lajur yang sudah dibuat 4.1.5.2 Multi Beam Echosounder Multi Beam Echosounder (MBES) merupakan alat yang memanfaatkan gelombang akustik untuk mendapatkan data kedalaman dan topografi dasar laut, termasuk lokasi dan luasan objek-objek yang mungkin membahayakan. Adapun lajur pemeruman yang digunakan yaitu 2000 x 1000 meter yang terdiri dari lajur perum utama dan lajur perum silang, seperti pada gambar di bawah ini 10 Gambar . Rencana Lajur Pemeruman Pantai Dalegan Berdasarkan rencana lajur pemeruman yang telah dibuat, jarak antara 2 lajur perum utama adalah 25 meter, sedangkan untuk lajur perum silang jaraknya adalah 4x lajur perum utama (100 meter). Setelah rencana lajur pemeruman selesai dibuat, rencana lajur pemeruman tersebut dimasukkan ke dalam aplikasi Helmsman’s Display Classic untuk mengetahui dan menyesuaikan lajur mana yang akan dilakukan pemeruman. Helmsman’s Display Classic ini terhubung dengan NaviScan guna memberikan informasi mengenai posisi kapal. Praktikum ini menggunakan alat WASSP Multibeam Echosounder. Data yang di dapat dari hasil pemeruman ini yaitu nilai x, y, dan z (kedalaman) dengan format file ekstensi SBD. Untuk mengolah data hasil pemeruman, diperlukan file ekstensi SBD, data pasang surut dengan format sesuai dengan software EIVA, dan data patch test. Namun, pada praktikum ini terdapat kesulitan dalam pengolahan data karena data tidak dapat terbaca oleh software NaviEdit JobPlanner. Hal tersebut disebabkan oleh versi software NaviEdit yang digunakan untuk mengolah data memiliki versi yang lebih rendah daripada versi NaviEdit saat melakukan akuisisi data di lapangan, serta terjadinya error pada SQL Server sehingga data akuisisi tidak dapat dibuka guna melakukan proses pengolahan. Berikut di bawah ini adalah hasil dari lajur pemeruman menggunakan MBES yang ditampilkan pada software WASSPCDX: 11 Gambar . Hasil Lajur Pemeruman MBES pada software WASSPCDX 4.1.5.3 Side Scan Sonar Side scan sonar adalah sebuah sistem peralatan survei kelautan yang memanfaatkan gelombang akustik. Peralatan ini digunakan untuk memetakan dasar laut yang juga dapat digunakan untuk mempelajari kehidupan di dasar laut. SSS merupakan strategi penginderaan untuk merekam kondisi dasar laut dengan memanfaatkan sifat media dasar laut yang mampu memancarkan, memantulkan dan atau menyerap gelombang suara. Hasil dari SSS adalah berupa citra dari dasar laut. Pada survei hidrografi kali ini instrumen side scan sonar menggunakan alat Echo Map. Gelombang suara yang digunakan dalam Echo Map memiliki frekuensi sebesar 455 kHz. Pulsa gelombang dipancarkan dalam pola sudut yang lebar mengarah ke dasar laut, dan gemanya diterima kembali oleh receiver dalam hitungan detik. Perekaman Echo Map perlu mengikuti pola lintasan survei yang sudah dibuat dan di-input ke dalam Echo Map tersebut. Dalam survei kali ini, Echo Map berada dalam satu kapal dengan alat Single Beam Echo Sounder sehingga Echo Map juga digunakan sebagai penentu arah kapal pada saat pelaksanaan pemeruman. Berikut adalah desain lajur pemeruman yang nantinya akan dimasukkan ke dalam Echo Map. Desain lajur pemeruman ini memiliki 41 lajur perum utama dan 18 lajur perum silang. 12 Gambar . Rencana Lajur Perum SSS Echo Map sendiri sebenarnya memiliki dua kemampuan yakni merekam citra dasar laut dan merekam kedalaman. Namun, untuk merekam kedalaman alat ini memiliki ketelitian yang rendah sehingga yang difokuskan dalam survei kali ini adalah perekaman citranya, sedangkan untuk perekaman data kedalamannya menggunakan Single Beam Echo Sounder. Untuk mengolah citra hasil Echo Map menggunakan software Global Mapper versi 18.2. Berikut adalah data citra hasil perekaman Echo Map yang sudah di plot di software Global Mapper. Gambar . Hasil Perekaman Echo Map pada Software Global Mapper Berikut adalah beberapa citra jika dilihat secara lebih dekat 13 Line Line 10 Citra Line 11 14 Line 12 4.1.6 Foto Udara 4.1.7 Toponimi 4.2 Analisis 4.2.1 Gps 4.2.2 Shoreline 4.2.3 Pasut 4.2.4 Oseanografi 4.2.5 Pemeruman 4.2.5.1 Single Beam Echosounder Pada survei hidrografi yang kami lakukan di pantai Dalegan Gresik, metode yang digunakan dalam pemeruman adalah sebagai berikut: 1) Panjang jalur perum utama adalah 1.7 KM dan jarak antara perum utama adalah 25m 2) Panjang jalur Silang adalah 1KM dan jarak antara perum silang adalah 100m 3) Interval perekaman kedalaman adalah 5 detik 15 4) Pemeruman menggunakan Singlebeam Echosounder Dengan spesifikasi tersebut pemeruman diatas, dapat dilakukan penghitungan ketelitian kedalaman hasil pemeruman. Untuk menghitung ketelitian hasil pemeruman, dibuat suatu standar oleh International Hidrographic Organization (IHO) yang tertuang dalam Special Publication No. 44. Spesifikasi orde-orde tersebut adalah: Gambar. Tabel Standar IHO Mengacu pada peraturan IHO dan metode yang digunakan, maka survei pemeruman kali ini menggunakan orde 1b. Untuk menghitung tingkat ketelitian vertikal, dapat menggunakan rumus yang telah diberikan IHO sebagai berikut: Dimana: a = kesalahan independen(jumlah kesalahan bersifat tetap) b = kesalahan dependen(jumlah kesalahan bersifat tidak tetap d = Ketinggian rata-rata antara data Long dan data Cross 16 Dengan menggunakan rumus diatas, dapat dicari maksimal kesalahan setiap titik untuk didapatkan hasil apakah pemeruman yang kami lakukan berhasil atau tidak. Berikut adalah sampel 50 dari 738 hitungan yang telah diolah. Tabel. Koreksi IHO CROSS 1 1 1 1 1 1 2 2 2 2 2 2 3 3 3 3 3 3 13 13 13 13 13 13 13 13 13 13 14 14 14 14 14 LONG 5 2 3 4 21 25 4 10 12 22 30 38 41 38 37 27 24 20 7 8 9 10 14 18 20 36 37 41 3 6 10 18 23 D_CROSS D_LONG RATA2_D 2.670819 2.121948 2.412337 2.502596 0.946356 0.617263 4.315578 3.747106 3.517522 2.826689 2.824911 2.73405 4.254133 4.454467 4.362893 3.256828 3.227948 3.779504 6.820731 6.680994 6.761522 6.711786 6.603633 6.555217 6.555217 6.172606 6.093133 6.054717 6.904772 6.913189 6.761342 6.687911 6.425272 2.502726 2.19505 2.460689 2.5333 1.054911 0.499578 4.391744 3.8438 3.6093 2.860022 2.792106 2.643601 4.144467 4.384219 4.374606 3.245356 3.107661 3.778633 6.837615 6.78267 6.782754 6.800689 6.781717 6.671689 6.671689 6.086411 6.026411 5.918018 7.021411 6.974874 6.899948 6.804189 6.62217 2.586773 2.158499 2.436513 2.517948 1.000634 0.558421 4.353661 3.795453 3.563411 2.843356 2.808509 2.688826 4.1993 4.419343 4.36875 3.251092 3.167805 3.779069 6.829173 6.731832 6.772138 6.756238 6.692675 6.613453 6.613453 6.129509 6.059772 5.986368 6.963092 6.944032 6.830645 6.74605 6.523721 17 BEDA KETINGGIAN CROSS&LONG 0.168093 0.073102 0.048352 0.030704 0.108555 0.117685 0.076166 0.096694 0.091778 0.033333 0.032805 0.090449 0.109666 0.070248 0.011713 0.011472 0.120287 0.000871 0.016884 0.101676 0.021232 0.088903 0.178084 0.116472 0.116472 0.086195 0.066722 0.136699 0.116639 0.061685 0.138606 0.116278 0.196898 KOREKSI_IHO 0.50113 0.500787 0.501002 0.50107 0.500169 0.500053 0.503193 0.502429 0.502141 0.501364 0.501331 0.50122 0.502971 0.50329 0.503215 0.501783 0.501693 0.502408 0.507821 0.507601 0.507691 0.507656 0.507513 0.507338 0.507338 0.50631 0.506168 0.50602 0.508128 0.508084 0.507824 0.507633 0.507141 14 14 14 14 14 15 15 15 15 15 15 15 15 15 15 7 7 7 7 7 7 8 8 8 8 8 8 9 9 9 9 9 9 25 28 29 30 34 8 10 23 25 31 35 36 37 38 41 7 15 40 1 5 6 3 5 8 9 10 15 1 10 16 28 35 3 6.454481 6.473689 6.493161 6.482633 6.450522 7.05899 7.048337 6.68355 6.592897 6.470939 6.209416 6.298981 6.288545 6.198328 6.217675 5.9953 5.754217 5.370717 5.826217 5.915633 5.95555 6.075421 6.304369 6.081914 6.161563 6.0698 5.946653 6.141033 6.256996 6.070153 5.867869 5.792078 6.232436 6.466319 6.493356 6.477022 6.383244 6.289467 7.027004 6.999356 6.641874 6.555393 6.409781 6.359263 6.274837 6.271182 6.255022 6.109096 5.979152 5.7573 5.329378 5.895633 5.980828 5.894911 6.230078 6.29592 6.079624 6.127781 6.050862 5.988911 6.305939 6.200967 6.164226 5.969022 5.661115 6.340013 6.4604 6.483523 6.485092 6.432939 6.369995 7.042997 7.023847 6.662712 6.574145 6.44036 6.28434 6.286909 6.279864 6.226675 6.163386 5.987226 5.755759 5.350048 5.860925 5.948231 5.925231 6.15275 6.300145 6.080769 6.144672 6.060331 5.967782 6.223486 6.228982 6.11719 5.918446 5.726597 6.286225 0.011838 0.019667 0.016139 0.099389 0.161055 0.031986 0.048981 0.041676 0.037504 0.061158 0.149847 0.024144 0.017363 0.056694 0.108579 0.016148 0.003083 0.041339 0.069416 0.065195 0.060639 0.154657 0.008449 0.00229 0.033782 0.018938 0.042258 0.164906 0.056029 0.094073 0.101153 0.130963 0.107577 0.507004 0.507054 0.507058 0.506945 0.506811 0.508314 0.508269 0.507447 0.507251 0.506961 0.50663 0.506636 0.506621 0.50651 0.506379 0.506022 0.505568 0.504814 0.505772 0.505944 0.505899 0.506357 0.506664 0.50621 0.506341 0.506169 0.505983 0.506503 0.506515 0.506284 0.505885 0.505512 0.506634 Berdasarkan nilai toleransi verikal yang telah didapat menurut IHO tersebut, maka dari 738 perpotongan pada survei pemeruman ini semua titik masuk dalam toleransi kesalahan vertikal sehingga presentase yang dihasilkan dalam koreksi ini adalah 100% masuk toleransi. 4.2.5.2 Multi Beam Echosounder Adapun kendala yang terjadi saat melakukan survei atau pengambilan data selama 4 hari di Pantai Dalegan, Gresik adalah sebagai berikut: 18 1. Kapal yang digunakan saat survei belum dapat mengikuti lajur yang telah dibuat sebelumnya dengan tepat karena terdapat kesulitan dalam mengarahkan nahkoda kapal • Hari Pertama (Kamis, 04 April 2019) : - Tidak dilakukan patch test pada sesi ke-1 karena asisten baru memberi tahu saat sudah berada di kapal sehingga belum sempat membuat lajur khusus untuk patch test - IP sering berganti-ganti sehingga cukup membutuhkan waktu untuk setting ulang (IP Address berganti 2 kali saat sedang melakukan pemeruman) - Patch Test baru dilakukan pada saat sesi ke-2 • Hari kedua (Jumat, 05 April 2019) : - IP Address berganti sebanyak 6 kali - ZDA tidak terhubung dengan benar sehingga tidak dapat berjalan di NaviScan - Adanya pergantian navigator sehingga kapal sering keluar dari lajur perum karena navigator yang baru belum begitu menguasai untuk memberikan arahan pada nahkoda kapal - Posisi tranduser berubah menjadi miring Hari ketiga (Sabtu, 06 April 2019) : - Pada sesi ke-1 tranduser dan baling-baling kapal tersangkut pada jaring nelayan - Saat sesi ke-2 gelombang laut cukup tinggi sehingga saat melakukan pemeruman pada lajur perum silang cukup kesulitan bagi kapal untuk tetap berada pada lajur yang sudah dibuat - IP Address berganti sebanyak 3 kali - ZDA dan GGA tidak terhubung dengan benar sehingga tidak dapat berjalan di NaviScan 2. Ada beberapa line yang tidak dilakukan pemeruman hingga akhir karena daerah tersebut kedalamannya kurang dari 1 meter sehingga nahkoda kapal tidak berani untuk mendekat agar kapal tidak karam. 4.2.5.3 Side Scan Sonar Hasil dari data citra Echo Map menunjukkan bahwa di Perairan Pantai Dalegan, Gresik hingga 2 km arah laut terlihat tidak memiliki morfologi dasar laut yang beragam. Terlihat dari hasil citra yang bersih dan halus serta tidak terdapat gundukan atau objek-objek tertentu. Yang terlihat hanyalah objek berupa karang-karang kecil dan halus, pasir, dan lumpur Objek Kunci Interpretasi Keterangan 19 Citra Pasir Bentuk Butiran kecil Sangat kecil Terang Ukuran Derajat kehitaman Pola dan Halus tanpa tekstur shadow Lumpur Bentuk Ukuran Butiran kecil Sangat gelap Gelap Derajat kehitaman Pola dan Halus tanpa tekstur shadow Karang Bentuk Karang kecil dan pasir Kecil Terang Ukuran Derajat kehitaman Pola dan Didominasi tekstur pasir Adapun kendala yang dialami selama melakukan survei hidrografi menggunakan Echo Map adalah: Daerah dekat pesisir pantai tidak bisa terekam secara penuh (full coverage) dikarenakan kedalamannya mencapai kurang dari 1 m sehingga tidak memungkinkan untuk melakukan perekaman. Transduser sempat tersangkut jaring nelayan pada saat melakukan perekaman pada survei pemeruman hari ketiga. Kesulitan dalam melakukan survei lajur silang pada hari ketiga pemeruman dikarenakan ombak yang tinggi yang mengakibatkan kapal sulit untuk bermanuver dan mengikuti rencana lajur perum. 20 4.2.6 Foto Format Kecil 4.2.7 Toponimi BAB 5. PENUTUP 5.1 Kesimpulan 5.1.5 Pemeruman 5.1.5.1 Single Beam Echosounder 1. Kedalaman terbesar dari hasil pengukuran Single Beam Echosounder adalah 7.737 m. 2. Kedalaman terdangkal dari hasil pengukuran Single Beam Echosounder adalah 0.447m. 3. Kedalaman rata-rata dari hasil pengukuran Single Beam Echosounder pada lajur perum kami adalah 5.567m 4. Nilai kedalaman yang telah dilakukan dengan SBES telah masuk toleransi menurut IHO dengan tingkat kepercayaan mencapai 100% 5. Side Scan Sonar yang dihasilkan oleh Echo Map telah mendapat coverage yang yang pada daerah yang memiliki kedalaman lebih dari 3 meter 5.1.5.2 Multi Beam Echosounder 5.1.5.3 Side Scan Sonar Dari hasil survei menggunakan side scan sonar Echo Map, didapatkan kesimpulan bahwa luas daerah sebesar 1699835.26795 m2 dari 41 lajur perum utama dan 18 lajur perum silang dengan daerah yang tidak tercover sebesar 25210.33101 m2 atau sekitar 1.430% dari total luasan. Adapun penyebab daerah tersebut tidak tercover adalah dikarenakan pemeruman tidak bisa dilakukan pada wilayah yang mendekati pesisir dan dermaga karena kedalamannya yang mencapai kurang dari 1 m sehingga dikhawatirkan tranduser akan rusak terkena karang. Dari citra yang dihasilkan, secara umum morfologi dasar laut perairan Pantai Dalegan tidak begitu beragam. Terdapat morfologi dasar laut berupa daerah berpasir dan karang serta daerah berlumpur. Luas daerah berpasir dan berkarang yang tercover yakni sebesar 415417.749167 m2 atau sekitar 24.430% sedangkan daerah berlumpur tercover sebesar 1260301.44602 m2 atau sekitar 74.140%. Fitur pasir salah satu contohnya terdapat pada koordinat 6º53’15.9809”LS dan 112º28’18.4250”BT, fitur lumpur contohnya terdapat pada koordinat 6º52'37.79” LS dan 112º28’35.5793”BT serta fitur karang contohnya terdapat pada koordinat 6º53’24.1198”LS dan 112º28’14.7949”BT. 21 5.2 Saran 5.2.5 Pemeruman Adapun saran untuk survei kedepannya yakni: 1. Rencanakan lajur perum dengan sebaik-baiknya agar dapat mengcover daerah lebih luas lagi. 2. Lebih berhati-hati dalam melakukan survei pemeruman, jangan sampai tranduser tersangkut jaring nelayan atau tersangkut objek yang lain 3. Perhatikan prakiraan pasang surut agar memudahkan dalam melakukan survei pemeruman agar tidak terganggu ombak sehingga kapal dapat bermanuver dengan baik untuk mengikuti desain lajur perum yang telah direncanakan. DAFTAR PUSTAKA Ingham, A,E. 1975, Hydrographic Survey In Sea Surveying, John Iley and Sons Ltd., London. Ingham. 1984. Hydrography for The Surveyor and Engineering. Geodetic Institute University Stuttgart. Jerman. IHO. 2008. Standards For Hydrographic Surveys. Monaco. International Hydrographic Bureau: Poerbondono, D., N., & Djunasjah, Eka. 2005. Survei Hidrografi. Bandung: PT. Refika Aditama. ISBN 979-3304-24-3. BSN. 2010. Survei Hidrografi Menggunakan Singlebeam Echosounder. Jakarta. SNI 76462010 Hidayat, A., Sudarsono, B., dan Sasmito, B. 2014. Survei Bathimetri Untuk Pengecekan Kedalaman Perairan Wilayah Pelabuhan Kendal. Semarang: Universitas Diponegoro. Jurnal Geodesi Undip Vol. 3 No. 1 Tahun 2014. LAMPIRAN Lampiran 1. Dokumentasi Lampiran 2. Form Ukur Lampiran 3. Tabel Pengolahan Lampiran 4. Peta Hasil 22