Pembuatan Sistem Monitoring Optimasi Energi Cahaya Matahari
advertisement

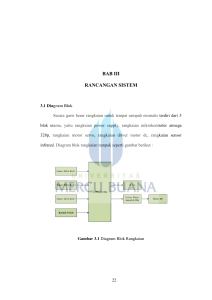
Pembuatan Sistem Monitoring Optimasi Energi Cahaya Matahari Menggunakan Sensor Arus pada Antarmuka Personal Computer 1) 2) Oki Petrus Hutauruk Takdir Tamba 3)Tua Raja Simbolon Jurusan Fisika Bidang Keahlian Elektronika & Instrumentasi – Fakultas MIPA USU 1 Mahasiswa FISIKA FMIPA 2 Dosen Pembimbing FISIKA FMIPA 3 Departemen FISIKA FMIPA Jl. Bioteknologi No 1 USU Email: [email protected] Hp: 0852 06384254 ABSTRAK Pemakaian energi matahari di Indonesia mempunyai prospek yang sangat baik, hal ini terlihat dari radiasi harian yaitu sebesar 4,5 kWh/m2/hari. Maka penulis mencoba merealisasikan alat yang dapat mengatur bagaimana arah panel sel surya selalu mengikuti pergeseran dari sumber cahaya yang akan menjadi sumber energi listrik. Tujuan dari penelitian alat ini adalah sebagai penggerak motor servo DC untuk mengendalikan gerak panel sel surya, pengontrol waktu setiap derajat motor servo DC menggerakkan panel sel surya, pengontrol waktu pengukuran dan pensaklaran panel diam ke panel bergerak, dan mengirim data secara serial ke PC menggunakan mikrokontroler AVR ATMega 8535. Panel sel surya yang digunakan memiliki daya listrik keluaran maksimum 0,3 Watt dengan sensor arus tipe ACS712ELC-20A sebagai pengindera arus untuk mengukur daya listrik yang dihasilkan oleh kedua panel sel surya. Kemudian resolusi ADC sebagai aproksimasi tiap bit sinyal yang masuk ke mikrokontroler AVR ATMega 8535 adalah sekitar ± 4,89 mV/bit dengan besar optimasi energi oleh kedua panel sel surya adalah 0,191 kWh dan sudut presisi motor servo DC tersebut sebesar 10 / 0,67 sekon. Selanjutnya data-data tersebut akan ditampilkan ke display PC ke dalam bentuk grafik melalui bahasa pemrograman visual Borland Delphi 7.0. Kata kunci : sensor arus ACS712ELC-20A, mikrokontroler AVR ATMega 8535, panel sel surya, Borland Delphi 7.0 ABSTRACT Use of a solar energy in Indonesia has a very good prospect, it is seen from the daily radiation at 4.5 kWh/m2/day. The author then tries to realize a tool that can set the direction of the solar cell panel always follows a shift from a light source that will be a source of electrical energy. The purpose of this research instrument is as a driver DC servo motor to control the motion of solar cell panels, the controller when any degree of DC servo motor to move the solar cell panel, time measurement and switching controller for still panel to the moving panel, and send serial data to a PC using AVR microcontroller ATMega 8535. Solar cell panels that are used have a maximum output power 0,3 Watt with current sensor type ACS712ELC-20A as a current sensing to measure the electrical power generated by the solar cell panel. Then the ADC resolution as an approximation of each bit signal going into the AVR microcontroller ATMega 8535 is about ± 4.89 mV/bit with the energy optimization by these two solar cell panels is 0,191 kWh and the precision angle of DC servo motor is 10 / 0,67 seconds. Furthermore, these data will be shown to the display PC into a graphical form through visual programming language Borland Delphi 7.0. Keywords: ACS712ELC-20A current sensor, AVR microcontroller ATMega 8535, solar cell panels, Borland Delphi 7.0 I. PENDAHULUAN Matahari merupakan sumber energi yang bergerak dan setiap derajat matahari bergerak akan mempengaruhi besar penerimaan intensitas cahaya yang akan diterima oleh suatu alat / bahan yang disebut panel sel surya. Panel sel surya akan menghasilkan energi listrik sesuai besar intensitas cahaya yang diterimanya dari pancaran cahaya matahari. Untuk memanfaatkan energi cahaya matahari dengan maksimal maka panel sel surya ini harus terus diarahkan sesuai dengan arah pancaran cahaya matahari. Arus listrik merupakan besaran penting untuk mengetahui produktivitas panel sel surya menghasilkan daya listrik. Selain itu arus juga sangat penting untuk diamati karena panel sel surya hanya bekerja pada siang hari atau saat ada cahaya. Semakin besar intensitas cahaya matahari yang ditangkap oleh panel sel surya, semakin besar daya listrik yang dihasilkan (Zulfi, 2010). Oleh karena itu dibuat alat "Pembuatan Sistem Monitoring Optimasi Energi Cahaya Matahari Menggunakan Sensor Arus pada Antarmuka Personal Computer" yang semua sistemnya dikontrol oleh mikrokontroler AVR ATMega 8535. Gambar 2.2 a) Arus yang Diterima pada IC b) Tegangan yang Diukur pada IC Dimana VH adalah tegangan yang melalui lebar pelat, I adalah arus yang melalui panjang pelat, B adalah medan magnet, d adalah tebal pelat, e adalah elektron, dan n adalah kerapatan elektron pembawa (Iwan Setiawan, 2009). Radiasi Harian Matahari II. TINJAUAN PUSTAKA Hall Effect Current Sensor (Sensor Arus ACS712ELC-20A) Cara kerja sensor ini adalah arus yang dibaca mengalir melalui kabel tembaga yang terdapat di dalam menghasilkan medan magnet yang ditangkap oleh integrated Hall IC dan diubah menjadi tegangan proporsional. Saat tidak ada arus yang terdeteksi, maka keluarannya adalah 2,5 V. Ketika saat arus mengalir dari IP+ ke IP-, maka keluaran akan >2,5 V. Ketika arus listrik mengalir terbalik dari IP- ke IP+, maka keluaran akan <2,5 V: Gambar 2.3 Radiasi Sorotan dan Radiasi Sebaran yang Mengenai Permukaan Bumi Faktor-faktor yang mempengaruhi penerimaan radiasi matahari di bumi : Sudut datang sinar matahari; sinar datang tegak lurus memberikan energi sinar yang lebih besar dibanding yang datangnya condong, karena sinar datang tegak lurus akan menyinari wilayah yang lebih sempit dibanding sinar yang condong. Panjang hari, bergantung pada musim dan l etak lintang suatu tempat. Pengaruh atmosfer; kejernihan atmosfer memberikan energi radiasi yang kuat, semakin banyak bahan penyerap sinar di atmosfer energi radiasi semakin turun. Pada waktu pagi dan sore radiasi yang sampai permukaan bumi intensitasnya kecil (Dewi, 2006). Gambar 2.1 Grafik Tegangan Keluaran terhadap Arus yang Terukur Karakteristik V Output Analog & V Output Digital Salah satu yang paling penting dari Hall Effect adalah perbedaan antara beban positif bergerak dalam satu arah dan beban negatif bergerak pada kebalikannya. Dengan mengukur tegangan Hall yang melalui bahan, dapat ditentukan kekuatan medan magnet yang ada. Hal ini bisa dirumuskan : VH = Pengaruh Sudut Datang terhadap Radiasi yang Diterima IB ........................................(2.1) ned Gambar 2.4 Arah Sinar Datang Membentuk Sudut Terhadap Normal Bidang pada Panel 2 Besarnya radiasi yang diterima panel sel surya dipengaruhi oleh sudut datang (angle of incidence), yaitu sudut antara arah sinar datang dengan komponen tegak-lurus bidang panel. Panel akan mendapat radiasi matahari maksimum saat matahari ﬩ dengan bidang panel. Saat arah matahari tidak ﬩ dengan bidang panel atau membentuk sudut pada Gambar 2.6 maka panel akan menerima radiasi lebih kecil dengan faktor cos (Yuwono, 2005). Ir = Ir0 cos......................................(2.2) Di mana: Ir = Radiasi yang diserap Panel Ir0 = Radiasi yang mengenai Panel = Sudut antara sinar datang dengan normal bidang Panel resistansinya. Rangkaian pengontrol akan mengamati perubahan resistansi dan ketika resistansi mencapai nilai yang diinginkan maka motor akan berhenti pada posisi yang diinginkan. Gambar 2.6 Susunan Dasar Motor Servo DC III. METODOLOGI PENELITIAN Pada bab ini akan dibahas mengenai perencanaan dan pembuatan perangkat lunak (software) serta perangkat keras (hardware) dari sistem yang akan dibuat. Di mana konsep dasar dari perencanaan tugas akhir ini adalah pembuatan akuisisi data sensor arus ACS712ELC-20A sebagai output tegangan analog dengan inputnya adalah arus analog pada panel sel surya sebagai sumber energi listrik sekaligus menyimpan data, mengolah, dan menampilkannya pada PC. Perangkat Lunak Borland Delphi 7.0 . Dari beberapa software aplikasi pemrograman yang banyak digunakan, Delphi versi 7 masih merupakan yang terbaik. Berikut beberapa kelebihan yang dimiliki oleh Delphi 7.0. antara lain: 1. Menggunakan IDE (Integrated Development Environment) atau Lingkungan Pengembangan Terpadu. 2. Menyediakan fasilitas pemrograman yang lengkap, yaitu sebagai bahasa pemrograman visual yang mempunyai cakupan kemampuan luas. 3. Untuk program database, Delphi menyediakan object yang sangat kuat, canggih dan lengkap. 4. Merancang aplikasi berbasis web development. Oleh karena fungsinya yang sangat beragam, Borland Delphi disebut Rapid Application Development (RAD). Diagram Blok Penelitian Sistem Rangkaian Diagram blok perancangan sistem dan pembuatan alat ke dalam bentuk software serta hardware dikontrol oleh mikrokontroler AVR ATMega 8535 dapat dilihat pada Gambar 3.1 di bawah ini. Panel Sel Surya 2 Switch pada Relay 12V Sensor Arus (ACS712ELC-20A) ATMega 8535 Sensor Tegangan Motor Servo Panel Sel Surya 1 RS 232 PC Gambar 2.5 Tampilan Awal Borland Delphi 7.0 Gambar 3.1 Diagram Blok Sistem Rangkaian Motor Servo DC Motor servo atau lebih singkat disebut Servo adalah sebuah alat yang terdiri dari motor DC, Gear Box dan Driver control yang terpadu menjadi satu. Cara kerja dari motor ini adalah ketika motor DC diberi signal oleh rangkaian pengontrol maka dia akan bergerak, demikian pula potensiometer otomatis akan mengubah Sistem Hardware pada Alat Solar Energy Light Monitoring Kedua panel ini dikaitkan dengan aluminium siku dan dipasang pada poros yang terhubung dengan gear polos. Poros terbuat dari sambungan 2 buah mur 5 cm, kemudian poros dihubungkan pada motor servo dengan 3 internal gear yang semuanya terintegrasi dalam gearbox. Komponen-komponen tersebut diletakkan pada kerangka yang terbuat dari mika akrilik seperti pada Gambar 3.2. dengan tegangan masukan maksimal dari ADC. Vin R1 Vout R2 Ground Gambar 3.4 Rangkaian Pembaca Tegangan Pada panel sel surya mempunyai Vout maksimal 10.00 Volt, pada mikrokontroler menggunakan V referensi sebesar 5 Volt. Agar dapat dibaca oleh mikrokontroler telah diset input ke ADC tidak melebihi 5 Volt. Maka nilai R1 = 5k1Ω dan R2 = 4k7Ω jika dimasukkan ke dalam persamaan adalah sebagai berikut: R2 V xV ....................(3.1) Gambar 3.2 Sistem Hardware pada Alat Solar Energy Light Monitoring Dipilih motor servo sebagai penggerak, karena dapat dilakukan pengesetan besar sudut pergerakannya. R1 R2 4700 x10 4,796 Volt 5100 4700 out Pengambilan Data Pergeseran Sudut Cahaya Matahari Pengambilan data posisi/sudut cahaya matahari sangat diperlukan. Hal ini bertujuan untuk mengetahui seberapa besar pergeseran sudut cahaya matahari pada selang waktu tertentu. Pengambilan data ini dilakukan pukul 9.00 hingga pukul 17.00. Hasil yang diperoleh pada langkah ini digunakan untuk perhitungan besar pergeseran arah panel sel surya setiap 30 menit. Vout in Vout inilah yang menjadi masukan ADC channel 1 pada port A.1 pada mikrokontroler ATMega 8535. Subroutine Pengaturan Motor Servo Pada perancangan alat ini, timer0 disetting agar clock timer diatur sebesar clock utama dibagi 1024 byte. Dengan frekuensi clock utama sebesar 11,059200 MHz, maka clock timer ini mempunyai frekuensi sebesar: f timer 8 MHz / 1024 byte = 0,0078125 Rangkaian Sensor Arus Sensor arus yang digunakan adalah sensor arus linear ACS712ELCTR-20A-T (±20A). Maksimum arus yang diterima oleh sensor ini adalah 20A dengan sensitifitas adalah 96mV/A-104mV/A (100mV/A). Vout ini yang nantinya akan menjadi masukan dari ADC mikrokontroler ATMega 8535 pada port A.0. MHz = 7812,5 Hz atau dengan kata lain bahwa periode 1 clock timer adalah: = 0,128 msec. 1 1 Ttimer 128s f timer 7812,5 sehingga, untuk mendapatkan nilai lebar pulsa high sebesar 1 msec., maka dibutuhkan pencacahan sebanyak: 1.10 3 s n 7,8125 kali 0,128.10 3 Berikut ini gambar sebuah sistem pemasangan motor servo ditunjukkan pada Gambar 3.5 berikut ini: Gambar 3.3 Rangkaian Sensor Arus ACS712 Rangkaian Pembaca Tegangan Rangkaian pembaca tegangan ditunjukkan pada Gambar 3.4. Besar R1 dan R2 disesuaikan dengan tegangan maksimum dari VCC yang diukur. Kemudian disesuaikan Gambar 3.5 Pengkabelan Pada Motor Servo 4 karena mikrokontroler tidak mengenal adanya bilangan pecahan, maka nilai n tersebut dibulatkan sehingga menjadi 7. Dengan nilai n pembulatan ke-7 ini, didapatkan nilai waktu sebenarnya sebesar: 7 t 1ms 128 0,896 ms 1000 Dan dengan cara yang sama pula didapatkan untuk nilai waktu 2ms akan diperoleh dari n=8 atau dengan waktu sesungguhnya sebesar : t 2 ms 256 Pada mikrokontroler setiap 6 detik sekali (3 detik untuk panel sel surya diam dan 3 detik untuk panel sel surya bergerak) di display timer0 mengirim data terkini dari sensor arus melalui proses switching pada Relay, sedangkan pada Delphi 7.0 di display timer1 mengambil selang waktu dari pengambilan data yang dilakukan oleh mikrokontroler berdasarkan settingan tampilan timer1 yang diinginkan. Sehingga dapat diselidiki pada jam berapakah jumlah energi cahaya matahari yang optimal diserap oleh kedua panel sel surya tersebut. 8 2,048 ms 1000 Untuk menghitung waktu sebesar 20 ms, maka dibutuhkan pencacahan sebanyak 2161 dengan n sebanyak 26 kali atau sebesar : t 20 ms Diagram Alir Keseluruhan Perangkat Lunak pada Mikrokontroler ATMega 8535 26 2560˙ 66,566 ms 1000 Dengan menggunakan timer 10 bit dibutuhkan 2 kali timer overflow ditambah 113 pencacahan lagi. Setelah keadaan ini terpenuhi, maka pin keluaran OC0 akan di-toggle dan timer akan direset, dan keadaan ini akan berulang-ulang dijalankan. Sehingga, keluaran pin OC0 akan tampak seperti ini: Toggle Toggle & Clear Timer Clear Timer Gambar 3.6 Pulsa Kendali Posisi Motor Servo Tipe motor servo DC pada rangkaian alat ini adalah motor servo standar 1800 dengan defleksi masing-masing sudut mencapai 900 sehingga total defleksi sudut dari kanan – tengah –kiri adalah 1800. Program Visualisasi Grafik Tegangan, Arus, & Daya pada Borland Delphi 7.0 Gambar 3.8 Flowchart Keseluruhan Perangkat Lunak pada Mikrokontroler AVR ATMega 8535 Gambar 3.7 Visualisasi Grafik Tegangan, Arus, & Daya terhadap Waktu pada Borland Delphi 7.0 5 Diagram Alir Keseluruhan Perangkat Lunak pada Borland Delphi 7.0 Start Baca Waktu pada PC Kirim Data Waktu ke Motor Servo Baca Data pada Komunikasi Serial Pisahkan Data Arus (A) & Tegangan (T) Tampilkan Grafik Arus Gambar 4.1 Pengujian Pengaruh Arah Sudut Cahaya Matahari terhadap Keluaran Sel Surya (a). Arah cahaya ﬩ panel (b). Arah cahaya membentuk sudut tertentu Tampilkan Grafik Tegangan Hitung Daya Pemasangan sebuah panel sel surya dengan posisi ﬩ terhadap arah cahaya matahari pada gambar 4.1(a) dilakukan untuk mengetahui keluaran maksimum, lalu untuk mengetahui pengaruh arah cahaya matahari terhadap keluaran panel dilakukan dengan merubah arah panel sel surya tiap 40-->50 hingga mencapai sudut 900 terhadap sudut datang cahaya matahari pada gambar 4.1(b). Dari langkahlangkah tersebut dapat diketahui pengaruh arah cahaya matahari terhadap keluaran panel sel surya. Tampilkan Grafik Daya Simpan Data dalam Database End Gambar 3.9 Flowchart Keseluruhan Perangkat Lunak pada Borland Delphi 7.0 IV. PENGUJIAN ALAT DAN PROGRAM Dalam tugas akhir ini dilakukan dua macam pengujian, yaitu pengujian perangkat lunak dan perangkat keras. Tujuan dari pengujian ini adalah untuk mengetahui kinerja dari sistem yang telah dibuat dan mengetahui kesalahan penghitungan oleh sistem. Ketepatan eksekusi antara program dengan modul yang dibuat untuk mengontrol sistem yang ada, sangat diharapkan dalam proses ini. Tanpa menutup kemungkinan adanya kekurangan dalam sistem yang telah dibuat. Gambar 4.2 Grafik Pengujian Derajat Pergerakan Panel Tiap 30 Menit Pengujian Data Pergeseran Sudut Cahaya Matahari Pada penelitian ini pertama dilakukan adalah pengujian pengaruh sudut datang cahaya matahari terhadap keluaran panel sel surya. Hal ini bertujuan untuk mengetahui seberapa besar pengaruh sudut datang cahaya matahari dan juga seberapa besar pengaruh sudut tersebut dapat diabaikan. Cara pengujian dilakukan seperti gambar 4.1. Pengujian Sensor Arus ACS712ELC-20A Sensor arus listrik ACS712ELC-20A dihubungkan dengan tegangan supply +12 Volt, variasi hambatan pada beban, amperemeter, dan voltmeter. Pengujian dilakukan dengan memberikan beban berupa tegangan konstan menggunakan baterai aki (Pb-Acid) yang diberi hambatan dengan nilai yang bervariasi. Data hasil pengujian ditunjukkan pada tabel berikut: 6 Tabel 4.1 Data Hasil Pengujian Sensor Arus Hambatan Arus secara Tegangan (Ω) Teori Output pada (mA) Sensor (mV) 100 120 590 200 60 290 300 40 200 400 30 150 500 24 120 600 20 100 700 17,1 90 800 15 80 900 13,3 70 1000 12 60 1100 10,9 50 Pengujian Antarmuka Komputer untuk Sensor Arus Karakterisasi dilakukan dengan mencatat pemberian beban arus listrik yang dilewatkan pada sensor arus listrik kemudian dikonversi ke bilangan biner pada PC. Setiap kenaikan mV/bit dari resolusi ADC dapat terekam sehingga tidak terpengaruh dengan pembulatan angka apabila pencatatan dengan nilai tegangan keluaran dari ADC pada PC. Hasil karakterisasi sensor arus listrik dan pengkondisi sinyal ditunjukkan pada Tabel 4.3 berikut ini. Tabel 4.3 Data Hasil Pengujian Antarmuka Komputer untuk Sensor Arus Arus Listrik pada PC Tegangan (mA) Output dari ADC pada PC Bil. Bil. Biner (V) Desimal 120 0001111000 120,832 59 0000111011 59,392 40 0000101000 40,96 30 0000011110 30,72 24 0000011000 24,576 20 0000010100 20,48 18 0000010010 18,432 16 0000010000 16,384 14 0000001110 14,336 12 0000001100 12,288 10 0000001010 10,24 Pada alat ini, tegangan referensi yang digunakan pada ADC adalah AVCC = 5 Volt, dan resolusi ADC 10 bit adalah 210 = 1024 byte. Untuk mengetahui tiap bit sinyal yang masuk ke mikrokontroler ATMega 8535, maka dapat diketahui dengan mencari nilai resolusi tegangan ADC. Resolusi tegangan dari sebuah ADC adalah sebanding dengan skala pengukuran keseluruhan dibagi dengan banyaknya nilai diskrit, yaitu: ..............................(4.2) Berikut ini perhitungan resolusi ADC 10 bit yang built in dalam ATMega 8535: .....(4.3) Sehingga kenaikan bit ADC dalam orde miliVolt, yaitu sekitar ± 4,89 mV/bit. Pengujian Rangkaian Switch pada Relay Relay ini berfungsi untuk mengcompare / membandingkan nilai sinyal arus analog yang diterima dari panel sel surya diam dan bergerak melewati sensor arus. Pada rangkaian ini digunakan relay 12 Volt, pengujian rangkaian relay dilakukan dengan memberikan tegangan 5 Volt dan 0 Volt pada basis transistor C945. Transistor C945 merupakan transistor jenis NPN, transistor jenis ini akan aktif jika pada basis diberi tegangan > 0.7 Volt dan tidak aktif jika pada basis diberi tegangan < 0.7 Volt. Aktifnya transistor akan mengaktifkan relay 12 Volt. Pengujian Pembaca Tegangan Pembaca tegangan yang digunakan adalah dengan menggunakan prinsip rangkaian pembagi tegangan. Pengujian dilakukan dengan memberikan variasi tegangan masukan dari 2,68 Volt - 15,40 Volt. Berikut adalah data hasil pengujian pembaca tegangan ditunjukkan pada Tabel 4.2 di bawah ini. Tabel 4.2 Data Hasil Pengujian Pembaca Tegangan Tegangan Masukan Tegangan Keluaran (V) (V) 2,68 0,71 4,61 1,12 6,64 1,40 8,55 1,60 10,13 1,72 11,92 1,82 15,40 1,92 Pengujian Motor Servo DC Pengujian dilakukan dengan menyesuaikan antara kemiringan awal panel sel surya ﬩ dengan arah cahaya matahari. Dari pengamatan menunjukkan waktu arah panel sel surya menghadap ﬩ dengan cahaya matahari adalah kurang lebih pukul 09:00 WIB. Kemudian ditentukan waktu panel tersebut bergerak adalah 8 jam sehingga awal sampai akhir panel bergerak dari pukul 09:00 WIB - 17.00 WIB. 7 Banyaknya putaran tiap derajat dari motor telah diuji dengan memberikan nilai data serial selisih 1 pada program mikrokontroler untuk menggerakkan motor. Telah dihitung terlebih dahulu kecepatan motor ini dilihat dari datasheet tipe HS-422 Standard Deluxe, yaitu 0,16sec./60° atau 160 msec. / 60°, sehingga 1° = 2,67 msec. tanpa beban (no load). Tingkat presisi motor servo DC yang sudah diprogram pada pembacaan data serial settingan USART, sebagai berikut: cukup stabil. Terjadi penurunan besar tegangan seperti grafik di atas dikarenakan perubahan besar intensitas yang diterima panel sel surya. Daya listrik panel sel surya terhadap waktu ditunjukkan pada Gambar 4.5 di bawah ini. Gambar 4.5 Grafik Hubungan Daya Listrik terhadap Waktu 4,440 Maka pada arah 500 - 900 menunjukkan pukul 09:00 WIB - 18.00 WIB dengan selisih 4,440 / 3000 ms atau 10 / 0,67 s waktu setempat. Grafik di atas menunjukkan daya listrik yang dihasilkan terjadi fluktuasi yang sangat tajam diakibatkan perubahan intensitas cahaya matahari yang diterima panel sel surya. Data Hasil Pengamatan Panel Sel Surya Bergerak Data hasil pengamatan ditunjukkan dalam grafik hubungan arus listrik terhadap waktu, tegangan terhadap waktu, dan daya listrik terhadap waktu. Grafik tersebut dapat ditunjukkan pada Gambar 4.3. Data Hasil Pengamatan Panel Sel Surya Diam Pada panel sel surya diam sama seperti panel sel surya bergerak mempunyai 3 macam data, arus listrik, tegangan listrik, daya listrik. Grafik tersebut dapat ditunjukkan pada Gambar 4.6 berikut ini. Gambar 4.3 Grafik Hubungan Arus Listrik terhadap Waktu Gambar 4.6 Grafik Hubungan Arus Listrik Terukur terhadap Waktu Grafik di atas menunjukkan adanya perubahan besar arus yang sangat drastis dikarenakan besar intensitas cahaya yang mengenai panel sel surya pada waktu tersebut berubah-ubah. Grafik hubungan tegangan listrik terhadap waktu ditunjukkan pada Gambar 4.4. Seperti pada panel sel surya bergerak terdapat fluktuasi perubahan besar arus listrik pada saat-saat akhir pengukuran. Grafik hubungan tegangan listrik terukur terhadap waktu ditunjukkan pada Gambar 4.7. Gambar 4.7 Grafik Hubungan Tegangan Listrik Terukur terhadap Waktu Gambar 4.4 Grafik Hubungan Tegangan Listrik terhadap Waktu Grafik hubungan daya listrik terukur terhadap waktu seperti ditunjukkan pada Gambar 4.8. Grafik di atas menunjukkan besar tegangan listrik yang dihasilkan panel sel surya 8 2. Intensitas Cahaya pada kedua Panel Sel Surya a. Panel Diam: G = Pmaximum A G = 0,32938 = 85,55Watt/m2 0,00385 b. Panel Bergerak: G = Pmaximum A Gambar 4.8 Grafik Hubungan Daya Listrik Terukur terhadap Waktu G= Perbandingan Data Hasil Pengamatan Dari kedua hasil pengukuran antara panel sel surya yang bergerak dan yang diam hasil perhitungan rata-rata ditunjukkan pada Tabel 4.3 di bawah ini. 3. Energi Optimasi a. Panel Diam: W = P x t W = 289,996214 mW x 8 jam = 2319,9697 mWjam b. Panel Bergerak: W = P x t W = 266,044575 mW x 8 jam = 2128,3566 mWjam maka energi optimasi yang diperoleh adalah: E Optimasi = E panel bergerak - E panel diam EO = Edinamik - Estatik = 2319,9697 - 2128,3566 = 191,6131 mWjam = 0,191Wh sehingga dapat menghasilkan efisiensi: (η) = 2319,9697 - 2128,3566 x 100% 2128,356 191,6131 η x 100% 9% 2128,356 Artinya, akan sangat efektif apabila penggunaan pengatur arah panel sel surya dalam suatu sistem realisasi alat memerlukan keakuratan yang tinggi. Tabel 4.3 Perbandingan Data Hasil Pengujian I, V, P -vs- t yang Terukur Oleh Kedua Panel Sel Surya Panel Statik Panel Dinamik I (mA) V (Volt) P (mWatt) 28,095965 9,365322 266,044575 29,400377 9,800126 289,996214 Dari hasil perbandingan menunjukkan besar daya listrik terukur yang dihasilkan panel sel surya yang bergerak lebih besar. Dengan mengusahakan panel sel surya bergerak untuk mendapatkan pancaran cahaya matahari lebih terarah, maka besarnya intensitas cahaya yang diterima harus dapat mempengaruhi panel sel surya. Dari kedua sistem pemasangan tersebut telah didapat jumlah nilai rata–rata tegangan keluarannya, intensitas cahaya pada kedua panel sel surya, & energi optimasi: V. PENUTUP Kesimpulan 1. a. Tegangan keluaran panel sel surya diam Voutput = 2247,6772 = 9,365322 Volt. Dari hasil analisa program dan hasil pengujian alat maka dapat diambil kesimpulan sebagai berikut : 240 persentase tegangan keluaran diperoleh adalah : Voutput rata rata x 100% Voutput max 0,35826 = 93,1Watt/m2 0,00385 yang 1. Besar intensitas cahaya matahari yang mengenai panel sel surya diam adalah 85,55Watt/m2 dan panel sel surya bergerak adalah 93,1Watt/m2, sebagai representasi jumlah kuat cahaya terbanyak yang terserap oleh kedua panel. 2. Dapat diketahui bahwa solar cell statik (diam) merupakan sistem kendali tidak teroptimasi, sedangkan yang dinamik (bergerak) adalah sistem kendali teroptimasi. Buktinya adalah Eoptimasi = Edinamik - Estatik = 2319,9697 mWh 2128,3566 mWh = 191,6131 mWh. Dengan demikian solar cell yang bergerak dapat menghasilkan energi optimasi 0,191 Wh lebih besar dari solar cell yang diam. 9,365322 x 100% 89,38 % 10,4782 b. Tegangan keluaran panel sel surya bergerak Voutput = 2352,0302 = 9,800126 Volt. 240 persentase tegangan keluaran yang diperoleh adalah : Voutput rata rata x 100% Voutput max 9,800126 x 100% 92,69% 10,5732 9 3. 4. 5. Dilihat dari jumlah sudut yang terbentuk oleh gerak panel dinamik, dapat dicari tingkat presisi motor servo DC yang sudah diprogram pada pembacaan data serial settingan USART. Sehingga sudut ratarata yang terbentuk sebesar 4,440 / 3000 ms atau sudut 10 dapat tercapai dalam hitungan waktu 0,67 s. Hutauruk, Pinondang. 1987. Tugas Akhir, STUDI OPTIMASI UNTUK LOKASI GARDU INDUK. Medan: Universitas Sumatera Utara. KOMPUTER, WAHANA. 2009. PAS (Panduan Aplikatif dan Solusi) "Aplikasi Cerdas Menggunakan DELPHI". Semarang: Wahana Komputer dan Yogyakarta: Penerbit Andi. Dari data hasil pengamatan, berdasarkan grafik I, V, P -vs- t untuk kedua panel sel surya tersebut diperoleh selisih persentase tegangan keluaran yang dihasilkan sebesar 3,31%. Sefly, Hotma. 2004. Tugas Akhir, Pengatur Arah Penjejak Sumber Cahaya Dua Dimensi Pada Sel Surya Berbasis Mikrokontroler AT89S8252.Yogyakarta: Universitas Gajah Mada. Efisiensi (η) yang dihasilkan oleh kedua panel sel surya dengan daya maksimum 0,35826 mW adalah sebesar 9%. Setiawan, Afrie. 2011. 20 APLIKASI MIKROKONTROLER ATMEGA 8535 & ATMEGA 16 MENGGUNAKAN BASCOM-AVR. Yogyakarta: Penerbit Andi. Saran Pada perancangan dan realisasi alat ini masih mempunyai banyak kekurangan sehingga perlu pengembangan lebih lanjut. Adapun saransaran pada perancangan dan realisasi alat ini antara lain: 1. 2. 3. Yuwono, Budi. 2005. Skripsi, Optimalisasi Panel Sel Surya dengan Menggunakan Sistem Pelacak Berbasis Mikrokontroler AT89C51. Surakarta: Universitas Sebelas Maret. Menggunakan sensor arus yang lebih presisi untuk mendapatkan kemampuan pengukuran daya listrik lebih maksimal. Zulfi, Muhammad Muqarrabin. 2010. Tugas Akhir, Rancang Bangun Penggerak dan Sensor Arus Pada Panel Sel Surya Berbasis Mikrokontroler ATMega 8535. Semarang: Universitas Diponegoro. Pengendalian panel sel surya mengikuti arah rotasi matahari adalah melalui kecepatan sudut dari motor servo DC, untuk itu akan lebih baik lagi apabila pengendalian ini dilakukan dengan melihat sudut dari matahari dikaji lebih lanjut pada penelitian selanjutnya agar memperoleh hasil yang maksimal. DOSEN PEMBIMBING Setiap pemasangan panel sel surya agar optimal digunakan panel sel surya dengan sistem bergerak, yang disebut dengan sistem kendali penjejak matahari pada panel sel surya tersebut. Drs. Takdir Tamba M.Eng.Sc NIP : 196006031986011002 DAFTAR PUSTAKA Fakultas Teknik, Tim. 2003. SENSOR DAN TRANSDUSER. Yogyakarta: Universitas Negeri Yogyakarta. EDITOR Hendri Maja Saputra, dkk. 2011. Rancang Bangun Sistem Kontrol Mekanisme Pelacakan Matahari Beserta Fasilitas Telekontrol Hemat Energi. Journal of Mechatronics, Electrical Power, and Vehicular Technology Vol. 02, No 1, hal. 31-40. Bandung: Pusat Penelitian Tenaga Listrik dan Mekatronik - LIPI. Dr. Kerista Tarigan, M.Eng.Sc NIP : 196002031986011001 10