Lecture09 - Data Dosen UTA45 JAKARTA
advertisement

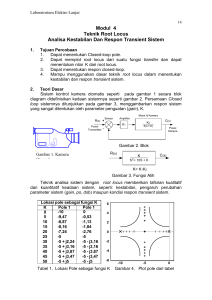
CONTROL SYSTEM ENGINEERING (Dasar Sistem Kontrol) Lecture09 Root Locus Introduction • Stabilitas suatu sistem tergantung pada akar-akar persamaan karakteristik sistem R(s) K G (s) C(s) H(s) • Bila K berubah, maka letak pole-pole nya juga berubah. • Desain sistem kendali melalui gain adjusment: pilih K sehingga polepole terletak ditempat yang diinginkan. • Desain sistem kendali melalui kompensasi: memindahkan letak pole yang tak diinginkan melalui pole-zero cancellation. • Diasumsikan : • 𝐾𝐺 𝑠 = 𝐺(𝑠) Root Locus • W.R. Evan mengembangkan metoda untuk mencari akar-akar persamaan orde tinggi : metoda Root Locus. • Root Locus: tempat kedudukan akar-akar persamaan karakterstik dengan K = 0 sampai K = tak hingga. • Melalui Root Locus dapat diduga pergeseran letak pole-pole terhadap perubahan K, terhadap penambahan pole-pole atau zero-zero loop terbuka. • Dengan sehingga • Sehingga Dengan demikian, akar-akar persamaan karakteristik, tergantung nilai K. Root Locus • Untuk K=0, akar-akar dari D(s) + KN(s) = 0 sama dengan akarakar dari D(s)=0 yang tidak lain adalah pole dari OLTF. • Untuk K = ∞, D(s) + KN(s) = 0 menjadi N(s)=0. Sehingga akarakar persamaan karakteristik adalah merupakan zero dari OLTF. Dengan demikian root locus akan mulai dari pole OLTF dan akan berakhir di zero OLTF. • Akar-akar persamaan karakteristik diberikan sebagai berikut. 1 KGs H s 0 • Dari persamaan di atas, menjadi Sehingga syarat magnitudo dan syarat sudut Root Locus Root Locus Root Locus • Root Locus mempunyai sifat simetri terhadap sumbu nyata. • Root Locus bermula dari pole-pole G(s)H(s) (untuk K=0) dan berakhir di zero-zero G(s)H(s) (untuk K=∞) termasuk zero-zero pada titik takhingga. • Root Locus cukup bermanfaat dalam desain sistem kendali linear karena Root Locus dapat menunjukkan pole-pole dan zero-zero loop terbuka mana yang harus diubah sehingga spesifikasi unjuk kerja sistem dapat dipenuhi. • Pendekatan desain melalui Root Locus sangat cocok diterapkan untuk memperoleh hasil secara cepat. Root Locus • Sistem kendali yang membutuhkan lebih dari 1 parameter untuk diatur masih dapat menggunakan pendekatan Root Locus dengan mengubah hanya 1 parameter pada satu saat. • Root Locus sangat memudahkan pengamatan pengaruh variasi suatu parameter (K) terhadap letak pole-pole. • Sketsa Root Locus secara manual tetap dibutuhkan untuk dapat memahaminya dan untuk memperoleh idea dasar secara cepat, meskipun MATLAB dapat melakukannya secara cepat dan akurat. • Spesifikasi transient (koefisien redaman) dapat ditentukan dengan mengatur nilai K melalui Root Locus. Plot Root Locus • Asa • Asas • Syarat magnitude dan Sudut : Plot Root Locus Step Plot Root Locus • 1. Cari persamaan karakteristik loop tertutup • Contoh : • 2. Cari titik awal dan titik akhir serta banyaknya cabang tempat kedudukan. • Titik awal : titik awal akar persamaan karakteristik adalah titik2 pole dari lup terbuka/ akar persamaan karakteristik loop tertutup dengan K=0 . • s = 0, s = -1 dan s = -2 • Titik akhir : titik akhir adalah salah satu zero lup terbuka atau suatu zero lup terbuka di tak terhingga. Dari contoh ini titik akhir berada di titik tak hingga / tak ada zero. • Banyak cabang : banyak cabang sama dengan banyaknya akar persamaan karakteristik Step Plot Root Locus • 3. Tentukan tempat kedudukan akar pada sumbu nyata, Tempat kedudukan akar pada sumbu nyata, dengan syarat sudut < G(s)H(s) = -180 • Step Plot Root Locus • 4. Tentukan tempat kedudukan akar asymtot, dan sudut Asymtot Step Plot Root Locus • 5. Tentukan perpotongan asymtot dengan sumbu nyata : Step Plot Root Locus • 6. Tentukan titik “breakway” dan titik “Break-In” Step Plot Root Locus • 7. Tentukan titik potong kurva dengan sumbu Imajiner; Step Plot Root Locus • Routh Hourwiz END THANK YOU