6 BAB II DASAR TEORI 2.1 Tinjauan Pustaka Perkembangan
advertisement

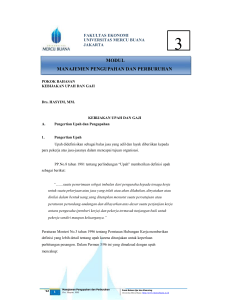
6 BAB II DASAR TEORI 2.1 Tinjauan Pustaka Perkembangan teknologi saat ini sudah semakin meningkat khususnya di dunia industri sehingga mengakibatkan munculnya berbagai macam peralatan yang dirancang guna meringankan pekerjaan manusia. Hal tersebut terlihat dari banyaknya jumlah peralatan yang sebelumnya dioperasikan oleh manusia, kini peranan tersebut telah digantikan oleh peralatan yang dikendalikan secara otomatis. Salah satu peralatan yang digunakan di beberapa industri adalah konveyor, alat ini difungsikan sebagai pengganti manusia dalam memindahkan suatu bahan atau barang dari satu tempat ke tempat lainnya. Ada dua jenis material yang dapat dipindahkan, yaitu muatan curah (bulk load) dan muatan satuan (unit load). Konveyor pada perkembangannya telah menggunakan berbagai otomatisasi untuk menjalankannya mulai dari menjalankan secara otomatis menggunakan sensor sebagai pendeteksi suatu bahan atau barang, mengatur kecepatan motor pengerak, pengontrolan dengan jarak jauh, visualisasi menggunakan HMI (Human Machine Interface), dan lain sebagainya. Penelitian dari Afrizal Fikri pada tahun 2015 yang berjudul “Monitoring Model Sistem Pengepakan dan Penyortiran Barang Berbasis SCADA “ telah dirancang sebuah alat berupa model mesin pengepakan dan penyortiran barang berbasis PLC Twido TWDLMDA20DTK, yang dimonitor oleh Supervisory 6 Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 7 Control And Data Acquisition (SCADA) menggunakan komunikasi Ethernet dengan kecepatan komunikasi sebesar 1ms dan pergerakan conveyor dikendalikan menggunakan Pulse width Modulation (PWM). Penelitian lainnya dari Hendri Ardiansyah pada tahun 2014 yang berjudul “Perancangan Simulator Sistem Pengepakan dan Penyortiran Barang berbasis PLC Twido TWDLMDA20DTK” yaitu membuat sebuah alat berupa simulasi mesin pengepakan dan penyortiran barang dengan menggunakan plant simulator konveyor dan elevator yang dikendalikan secara otomatis oleh PLC. Secara sederhana prinsip kerja dari sistem adalah mampu melakukan proses packing (pengepakan) dengan metoda pencacah barang, kemudian penyortiran dengan membedakan kualitas barang berdasarkan beratnya. Dari penelusuran pustaka yang telah dilakukan, khusunya berhubungan dengan kendali konveyor menggunakan PLC, maka dalam Skripsi ini membuat sistem kendali konveyor untuk penyortiran tinggi dan rendahnya ukuran dari kemasan barang dengan pengendalian konveyor pada plant konveyor menggunakan metode Pulse width Modulation (PWM) dan dilakukan monitoring menggunakan Supervisory Control And Data Acquisition (SCADA) pada proses penyortiran. Untuk menghubungkan Supervisory Control And Data Acquisition (SCADA) dengan PLC digunakan komunikasi Ethernet. 2.2 Catu Daya Catu daya merupakan suatu rangkaian yang paling penting bagi sistem elektronika. Ada dua sumber catu daya yaitu sumber AC dan sumber DC. Sumber Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 8 AC yaitu sumber tegangan bolak – balik, sedangkan sumber tegangan DC merupakan sumber tegangan searah. Gambar 2.1 Grafik tegangan AC dan DC (www.corrosioncop.com/prinsip-kerja-transformer-rectifier-pada-proteksikatodik/) Sumber tegangan AC berayun sewaktu-waktu pada kutub positif dan sewaktuwaktu pada kutub negatif, sedangkan sumber DC selalu pada satu kutub saja, positif saja atau negatif saja. Dari sumber AC dapat disearahkan menjadi sumber DC dengan menggunakan rangkaian penyearah yang dibentuk dari dioda. Ada tiga macam rangkaian penyearah dasar yaitu penyearah setengah gelombang, penyearah gelombang penuh 2 dioda dan penyearah gelombang penuh sistem jembatan. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 9 2.2.1 Penyearah Gelombang Penuh Sistem Jembatan Penyearah sistem jembatan (bridge rectifier) adalah sebuah penyearah yang menggunakan empat buah blok dioda yang disusun model jembatan. Penyearah sistem jembatan mampu menghasilkan output gelombang penuh dari satu gulungan transformator. Gambar 2.2 Penyearah dengan sistem jembatan (http://teknikelektro.org/penyearah-gelombang-penuh-sistem-jembatan) Penyearah sistem jembatan disusun oleh empat blok dioda yang bekerja secara bergantian pada tiap fase sinyal sinus. Prinsip kerja rangkaian penyearah gelombang penuh sistem jembatan dapat dijelaskan melalui Gambar 2.3. Gambar 2.3 Prinsip kerja penyearah gelombang penuh sistem jembatan (http://teknikelektro.org/penyearah-gelombang-penuh-sistem-jembatan) Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 10 Pada rangkaian jembatan mendapatkan bagian positif dari siklus sinyal AC. Maka D1 dan D3 hidup (on), karena mendapat bias maju. D2 dan D4 mati (off), karena mendapat bias mundur. Sehingga arus i1 mengalir melalui D1, RL, dan D3. Sedangkan apabila jembatan memperoleh bagian siklus negatif. Maka D2 dan D4 hidup (on), karena mendapat bias maju. D1 dan D3 mati (off), karena mendapat bias mundur. Sehingga arus i2 mengalir melalui D2, RL, dan D4. Arah arus i1 dan i2 yang melewati RL sebagaimana terlihat Pada Gambar 2.3 adalah sama, yaitu dari ujung atas RL menuju ground. Dengan demikian arus yang mengalir ke beban merupakan penjumlahan dari dua arus i1 dan i2, dengan menempati paruh waktu masing-masing. Bentuk gelombang yang dihasilkan oleh penyearah gelombang penuh sistem jembatan terkadang masih kasar, sehingga diperlukan adanya filter untuk membuang bagian yang kasar. Filter yang paling sederhana adalah dengan memasang kondensator paralel dengan beban. Misalnya dipasang pada rangkaian penyearah gelombang penuh dengan sistem jembatan, maka rangkaiannya seperti Gambar 2.4. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 11 Gambar 2.4 Filter penyearah gelombang penuh sistem jembatan (http://teknikelektro.org/penyearah-gelombang-penuh-sistem-jembatan) Fungsi kapasitor pada rangkaian di atas untuk menekan ripple yang terjadi dari proses penyearahan gelombang AC. Setelah dipasang filter kapasitor maka output dari rangkaian penyearah gelombang penuh ini akan menjadi tegangan DC (Direct Current). 2.2.2 Regulator Tegangan Regulator tegangan adalah bagian power supply yang berfungsi untuk memberikan stabilitas output pada suatu power supply. Output tegangan DC dari penyearah tanpa regulator mempunyai kecenderungan berubah harganya saat Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 12 dioperasikan. Adanya perubahan pada masukan AC dan variasi beban merupakan penyebab utama terjadinya ketidakstabilan pada power supply. Pada sebagian peralatan elektronika, terjadinya perubahan catu daya akan berakibat cukup serius. Untuk mendapatkan catu daya yang stabil diperlukan regulator tegangan. Regulator tegangan untuk suatu power supply biasanya menggunakan sirkuit terintegrasi (IC) atau menggunakan dioda zener. IC regulator tegangan yang banyak dijumpai di pasaran antara lain IC regulator keluarga 78xx dan LM317. 2.3 Sensor Photodioda Photodioda adalah dioda yang bekerja berdasarkan intensitas cahaya, jika photodioda terkena cahaya maka photodioda bekerja seperti dioda pada umumnya, tetapi jika tidak mendapat cahaya maka photodioda akan berperan sebagai resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Gambar 2.5 Simbol dan bentuk Photodioda (http://margionoabdil.blogspot.co.id/2015/03/sensor-cahaya-photodiode.html) Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 13 Photodioda merupakan sensor cahaya semikonduktor yang dapat mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya yang dapat dideteksi oleh photodioda ini mulai dari cahaya infra merah, cahaya tampak, ultra ungu sampai dengan sinar-X. Gambar 2.6 Rangkaian Photodioda (http://margionoabdil.blogspot.co.id/2015/03/sensor-cahaya-photodiode.html) Karena photodioda terbuat dari semikonduktor p-n junction maka cahaya yang diserap oleh photodioda akan mengakibatkan terjadinya pergeseran foton yang akan menghasilkan pasangan electron-hole dikedua sisi dari sambungan. Ketika elektron-elektron yang dihasilkan itu masuk ke pita konduksi maka elektronelektron itu akan mengalir ke arah positif sumber tegangan sedangkan hole yang dihasilkan mengalir ke arah negatif sumber tegangan sehingga arus mengalir di Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 14 dalam rangkaian. Besarnya pasangan elektron atau hole yang dihasilkan tergantung dari besarnya intensitas cahaya yang diserap oleh photodioda. 2.4 Optocoupler Dalam Dunia Elektronika, Optocoupler juga dikenal dengan sebutan Optoisolator, Photocoupler atau Optical Isolator. Optocoupler adalah komponen elektronika yang berfungsi sebagai penghubung berdasarkan cahaya optik. Pada dasarnya Optocoupler terdiri dari 2 bagian utama yaitu Transmitter yang berfungsi sebagai pengirim cahaya optik dan Receiver yang berfungsi sebagai pendeteksi sumber cahaya. Masing-masing bagian Optocoupler (Transmitter dan Receiver) tidak memiliki hubungan konduktif rangkaian secara langsung tetapi dibuat sedemikian rupa dalam satu kemasan komponen. Gambar 2.7 Simbol dan bentuk optocoupler (http://teknikelektronika.com/pengertian-optocoupler-fungsi-prinsip-kerjaoptocoupler/) Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 15 2.4.1 Jenis-jenis Optocoupler Jenis-jenis Optocoupler yang sering ditemukan adalah Optocoupler yang terbuat dari bahan Semikonduktor dan terdiri dari kombinasi LED (Light Emitting Diode) dan Phototransistor. Dalam Kombinasi ini, LED berfungsi sebagai pengirim sinyal cahaya optik (Transmitter) sedangkan Phototransistor berfungsi sebagai penerima cahaya tersebut (Receiver). Jenis-jenis lain dari Optocoupler diantaranya adalah kombinasi LED-Photodiode, LED-LASCR dan juga LampPhotoresistor. 2.4.2 Prinsip Kerja Optocoupler Pada prinsipnya, Optocoupler dengan kombinasi LED-Phototransistor adalah Optocoupler yang terdiri dari sebuah komponen LED (Light Emitting Diode) yang memancarkan cahaya infra merah (IR LED) dan sebuah komponen semikonduktor yang peka terhadap cahaya (Phototransistor) sebagai bagian yang digunakan untuk mendeteksi cahaya infra merah yang dipancarkan oleh IR LED. Untuk lebih jelas mengenai Prinsip kerja Optocoupler, Gambar 2.8 menunjukan rangkaian internal dari komponen Optocoupler. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 16 Gambar 2.8 Rangkaian internal komponen optocoupler (teknikelektronika.com/pengertian-optocoupler-fungsi-prinsip-kerjaoptocoupler) Dari gambar diatas dapat dijelaskan bahwa Arus listrik yang mengalir melalui IR LED akan menyebabkan IR LED memancarkan sinyal cahaya Infra merahnya. Intensitas Cahaya tergantung pada jumlah arus listrik yang mengalir pada IR LED tersebut. Kelebihan Cahaya Infra Merah adalah pada ketahanannya yang lebih baik jika dibandingkan dengan Cahaya yang tampak. Cahaya Infra Merah tidak dapat dilihat dengan mata telanjang. Cahaya Infra Merah yang dipancarkan tersebut akan dideteksi oleh Phototransistor dan menyebabkan terjadinya hubungan atau Switch On pada Phototransistor. Prinsip kerja Phototransistor hampir sama dengan Transistor Bipolar biasa, yang membedakan adalah Terminal Basis (Base) Phototransistor merupakan penerima yang peka terhadap cahaya. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 17 2.4.3 Aplikasi Optocoupler Optocoupler banyak diaplikasikan sebagai driver pada rangkaian Mikrokontroller, driver pada Motor DC, DC dan AC power control dan juga pada komunikasi rangkaian yang dikendalikan oleh PC (Komputer). 2.5 Relay Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 18 Gambar 2.9 Bentuk dan simbol relay (http://teknikelektronika.com/pengertian-relay-fungsi-relay/) Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu : 1. Electromagnet (Coil) 2. Armature 3. Switch Contact Point (Saklar) 4. Spring Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 19 Gambar 2.10 Struktur sederhana relay (http://teknikelektronika.com/pengertian-relay-fungsi-relay/) Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu : 1. Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup) 2. Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka) Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila Kumparan Coil diberikan arus listrik, maka akan timbul gaya Elektromagnet yang kemudian menarik Armature untuk berpindah dari Posisi sebelumnya (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). 2.6 Motor DC Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 20 tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula seperti pada gambar 2.11. Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor. Gambar 2.11 Kontruksi motor DC (Fachkunde electrotechnik, 2006) Konstruksi motor DC pada gambar 2.11 memiliki 2 bagian dasar,yaitu : 1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen. 2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik mengalir. Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh magnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 21 Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. 2.7 Programmable logic controller (PLC) Programmable logic controller (PLC) adalah perangkat untuk melaksanakan fungsi kendali dan juga monitor yang dapat diprogram. Selain dikenal sebagai PLC, perangkat ini juga disebut sebagai programmable controller atau programmable binary system. Pada dasarnya PLC merupakan suatu bentuk komputer. Perbedaan dengan komputer pada umumnya (PC) adalah PLC ditujukan khusus untuk aplikasi industri sehingga mempunyai beberapa karakteristik khusus. PLC telah dilengkapi dengan I/O digital dengan koneksi dan level sinyal yang standar sehingga dapat langsung dihubungkan dengan berbagai macam perangkat seperti saklar, lampu, relay ataupun berbagai macam sensor dan aktuator. Konstruksi PLC bersifat modular sehingga memudahkan dalam penggantian dan penambahan fasilitas yang diperlukan. PLC juga relatif lebih tahan terhadap keadaan di pabrik, misalnya kelembaban dan temperatur yang tinggi, serta gangguan dan derau yang mungkin terdapat pada berbagai peralatan industri. Rangkaian kontrol menggunakan PLC dibuat dengan software, sehingga bersifat fleksibel dan mudah untuk dimodifikasi. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 22 2.7.1 Struktur PLC Komponen dari suatu PLC tidak jauh berbeda dengan komponen komputer pada umumnya. Struktur dasar suatu PLC terdiri atas central processing unit, memori dan modul input/output. 2.7.1.1 Central Processing Unit Central Processing Unit (CPU) adalah otak dari suatu PLC yang bertugas mengendalikan dan memonitor seluruh operasi PLC dengan cara melaksanakan program yang terdapat pada memori. Sistem bus internal digunakan untuk menghubungkan antara CPU dengan memori dan modul I/O di bawah kendali CPU. CPU memerlukan detak (clock) dengan frekuensi tertentu yang dapat dihasilakan oleh krisal kuarts eksternal ataupun rangkaian osilator RC. Detak tersebut menentukan kecepatan operasi PLC dan dapat digunakan untuk sinkronisasi semua elemen dalam sistem. Seluruh PLC modern menggunakan mikroprosesor sebagai CPU. 2.7.1.2 Memori Memori adalah peranti yang digunakan sebagai media penyimpanan, baik program maupun data. PLC menggunakan piranti memori semikonduktor berupa RAM ataupun ROM. Pada kebanyakan PLC RAM digunakan untuk pengembangan program dan uji coba karena kemudahan dalam perubahan program. Untuk mencegah hilangnya program dari RAM saat dilepas catu dayanya sering kali PLC dilengkapi dengan baterai. Setelah program dibuat dan diuji coba, program dapat dimasukan ke EEPROM yang bersifat tetap. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 23 Selain untuk menyimpan program memori pada PLC juga digunakan untuk penyimpanan sementara status jalur I/O dan variabel fungsi internal seperti timer, counter, penanda relay, hasil operasi aritmatika/logika dan lain-lain. Untuk keperluan ini digunakan RAM. 2.7.1.3 Modul I/O Modul I/O adalah pintu keluar/masuknya informasi dari dan ke PLC. Modul ini dapat bergabung menjadi satu unit PLC ataupun berupa modul yang terpisah. Modul input dan output berfungsi sebagai antarmuka antara komponen internal PLC dengan piranti lain di luar PLC sehingga didalamnya terdapat fungsi pengkondisian sinyal dan isolasi. Modul I/O yang paling umum adalah modul I/O digital yang hanya menerima/mengirim sinyal on/off saja. Meski kebanyakan komponen internal PLC bekerja pada level tegangan TTL dan CMOS, yang berkisar antara 5 – 15 Volt, namun sinyal yang diproses dari atau ke I/O digital biasanya berkisar antara 24 Volt sampai 240 Volt pada arus besar (hingga beberapa ampere). Dengan adanya unit I/O ini PLC dapat langsung dihubungkan dengan piranti input dan output tanpa harus melalui rangkaian perantara atau relay. Setiap modul I/O dirancang untuk memudahkan proses koneksi peranti input dan output dengan PLC. Untuk itu seluruh PLC dilengkapi dengan terminal sekrup standar sehingga mudah dan cepat saat proses pengkabelan. Setiap terminal I/O mempunyai alamat ataupun nomor jalur yang unik yang digunakan saat pemrograman untuk mengidentifikasi masing-masing input dan output. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 24 2.7.2 Operasi PLC PLC mempunyai 3 operasi dasar yang dilakukan secara berurutan, yaitu : 1. Monitor input, yaitu membaca keadaan piranti input dan menyalin nilainya ke memori. 2. Eksekusi program, yaitu melaksanakan program berdasarkan nilai input yang terdapat pada memori untuk menghasilakan nilai output. Program berupa ladder diagram dieksekusi dari kiri ke kanan, dari atas ke bawah. 3. Mengubah kondisi output berdasarkan hasil eksekusi program. Ketiga proses tersebut membentuk siklus yang disebut proses scanning, proses ini dilaksanakan secara berulang-ulang selama PLC beroperasi. Waktu yang dibutuhkan pada satu kali scanning disebut waktu scanning (scanning time). 2.7.3 Pemrograman PLC TWIDO Pada PLC ada empat metode/tipe bahasa pemrograman yang bisa digunakan, namun keempat bahasa pemrograman tersebut tidak semua didukung oleh suatu PLC, bahasa pemrograman yang digunakan tersebut adalah ladder diagram languages (LD), Instruction list languages (IL)/statement list (SL), sequential function chart (SFC)/grafcet languages, dan high-level languages (biasanya Visual Basic). Namun umumnya bahasa pemrograman yang banyak didukung oleh PLC adalah ladder diagram languages (LD) dan instruction list languages (IL). Bahasa ladder diagram pada dasarnya adalah suatu perangkat simbol dari perintah Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 25 yang digunakan untuk menciptakan program pengontrol. Bahasa pemrograman tersebut dirancang untuk mewakili sedekat mungkin penampakan sistem relay yang diberi pengawatan yang secara garis besar berfungsi untuk mengontrol output yang didasarkan pada kondisi input. Program ladder diagram dapat ditampilkan pada layar monitor kemudian elemen-elemen seperti kontak normally open, kontak normally closed, timer, counter, compare block, relay, dan lain-lain dinyatakan dalam bentuk gambar. 2.7.3.1 Pemrograman Menggunakan Ladder Diagram Ladder diagram merupakan salah satu bahasa pemrograman yang didukung oleh PLC Twido yang pembuatannya dapat dibuat melalui software TwidoSuite. Pembuatan ladder diagram pada TwidoSuite terdiri dari beberapa rung, dan dari masing-masing rung tersebut dapat dibuat ladder diagram yang dimulai dari bar sisi kiri dan berakhir pada bar sisi kanan. Untuk menggunakan Twidosuite, klik icon Twidosuite pada desktop seperti pada Gambar 2.12. Gambar 2.12 Icon twidosuite Untuk pertama kalinya, Twidosuite akan menampilkan tampilan seperti pada Gambar 2.13. Pilihlah „Programming Mode‟ untuk memprogram PLC. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 26 Gambar 2.13 Tampilan menu twidosuite Layar program akan menuju ke Gambar 2.14, yaitu layar “project management”. Programmer diberi pilihan untuk membuat program baru atau membuka program yang sudah jadi. Pilih “Create a new Project”. Gambar 2.14 Pilihan project management Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 27 Tentukan nama project dan directory tempat project disimpan pada menu project information seperti pada Gambar 2.15, kemudian klik tombol „Create‟. Gambar 2.15 Mengisikan nama project dan directory Pada tampilan berikutnya pilih „Describe‟ seperti pada Gambar 2.16. Gambar 2.16 Pilih „Describe‟ untuk setting PLC Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 28 Tampilan berikutnya adalah layar untuk setting PLC seperti pada Gambar 2.17. Gambar 2.17 Layar setting PLC Pada Layar Setting PLC, pilih di kotak sebelah kanan (catalog) Bases – Compact – TWDLCAE40DRF, kemudian lakukanlah drag and drop ke kotak sebelah kiri pada gambar PLC-nya. Setelah setting PLC selesai, pilih pada bagian kiri atas „Program‟ untuk menuju editor program PLC. Gambar 2.18 Pilih program untuk membuat program PLC Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 29 Hasilnya akan tampil editor diagram ladder seperti Gambar 2.19. Gambar 2.19 Tampilan pertama editor ladder diagram Untuk memulai menggambar Ladder diagram, klik icon „add section‟, sampai muncul tampilan pada Gambar 2.20. Gambar 2.20 Editor ladder beserta fungsi dasar PLC Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 30 2.7.3.2 Instruksi Utama Ladder Diagram 2.7.3.2.1 Kontak Memungkinkan untuk masukan kontak seperti tombol tekan dan internal variable contacts. Kontak terdiri dari dua jenis kontak yaitu : 1. Kontak Normally open (NO) dengan notasi : 2. Kontak Normally Closed (NC) dengan notasi : 2.7.3.2.2 Coil Secara umum coil berhubungan langsung dengan keluaran yang akan mengerjakan semua perintah sesuai dengan yang diinginkan. Pada software TwidoSuite, coil terdiri dari empat jenis, yaitu : 1. Direct coils dengan notasi : 2. Reverse coils dengan notasi : Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 31 3. Set coils dengan notasi : 4. Reset coils dengan notasi : 2.7.3.3 Link Elements Berupa garis penghubung antara kontak dengan kontak atau sebagai garis penghubung antara kontak dengan coil. Ada dua jenis garis penghubung yang digunakan yaitu garis yang berbentuk vertikal dan garis berbentuk horizontal. 1. Horizontal Connection Digunakan untuk hubungan secara seri. 2. Vertical Conection Digunakan untuk membuat hubungan secara paralel. Adapun cara membuat ladder diagram dengan TwidoSuite, ladder diagram program dinyatakan dalam suatu bentuk umum simbolik untuk relay yang dikontrol oleh rangkaian elektrik. Program ditampilkan pada layer dan elemen-elemen seperti kontak normally open, kontak normally close, counter, sequencer (rotary switch), relay dan lain-lain, dinyatakan dalam bentuk gambar. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 32 Listrik mengalir dari sisi kiri ke sisi kanan yang disebut ladder line (terdiri dari beberapa rung). Adapun aturan umum menggambarkan suatu program ladder diagram adalah : 1. Aliran listrik/tenaga dari rel kiri ke rel kanan. 2. Suatu coil keluaran tidak dihubungkan langsung ke rel (rail) sebelah kiri. 3. Tidak ada kontak yang ditempatkan di kanan dari suatu coil keluaran. 4. Hanya satu dari coil keluaran dalam suatu ladder line. 5. Tiap coil keluaran umumnya hanya satu kali dalam suatu program. 2.7.3.4 Prinsip Pemrograman TwidoSuite Pada dasarnya pemrograman PLC menggunakan TwidoSuite dibagi atas 7 dasar komponen, yaitu : input, output, internal bits, membuat pengalamatan (addressing), timer, counter, dan compare block. 2.7.3.4.1 Input Input merupakan masukan yang berupa signal yang diterima dari sensor luar. Sintaksis yang digunakan pada Twido adalah sebagai berikut : %Iy.z % = Menunjukkan objek. I = Menunjukkan masukan. y = Nomor/jumlah modul. z = Nomor/jumlah saluran. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 33 2.7.3.4.2 Output Output adalah sinyal yang dihasilkan oleh PLC yang dikirim ke relay dan lain sebagainya. Sintaksis yang digunakan adalah sebagai berikut : %Qy.z % = Menunjukkan obyek. Q = Menunjukkan keluaran. y = Nomor/jumlah modul. z = Nomor/jumlah saluran. 2.7.3.4.3 Internal Bits Internal bits merupakan wilayah memori yang dialokasikan oleh PLC. Internal bits ini dapat dipakai sebagai output internal dan hanya dapat digunakan untuk keperluan internal. Dengan kata lain, output internal tidak langsung mengendalikan peranti output. Pada PLC Twido compact type TWDLCAE40DRF internal bits yang bisa digunakan yaitu mulai dari %M0 sampai %M255. Sintaksis yang digunakan adalah sebagai berikut: %Mn % = Menunjukkan obyek. M = Menunjukkan bit di dalam memori internal. N = Nomor/Jumlah bit internal. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 34 2.7.3.4.4 Membuat Pengalamatan (Addressing) Pengalamatan adalah memberi notasi input dan output pada kontak dan coil ladder diagram. 1. Format umum dari pengalamatan I/O adalah sebagai berikut : % I, Q x . y . z I = Input Q = Output x = Master (0)/Slave (1 – 7) controller y = Base (0)/Expansion (1 – 7) I/O z = I/O chanel number 2. Format umum dari pengalamatan bit adalah sebagai berikut : % M, S, or X, i M = Internal bits S = Sistem bits X = Step bits i = Number Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 35 3. Format umum pengalamatan word adalah sebagai berikut : % M, K, or S, W, i M = Internal word K = Konstanta word S = Sistem word W = Word (16 bit) i = Number 2.7.3.4.5 Timer Timer digunakan sebagai pengatur waktu proses, dapat digunakan sebagai komponen tundaan (timer on delay). Umumnya merupakan kontak fungsi yang dapat diatur memberikan suatu keluaran kondisi on selama selang waktu tertentu (timer off delay). Dapat digunakan untuk membuat pulsa dengan lebar tertentu/timer pulsa (ini termasuk ke dalam fitur tambahan atau hanya terdapat pada PLC tertentu saja). Dalam timer terdapat input, konstanta timer, output. Input berfungsi memulai aktifnya timer untuk mulai menghitung waktu. Konstanta timer memberikan nilai berapa lama timer aktif. Output memberikan keluaran logika 1 atau 0 bila waktu yang dinyatakan dalam konstanta timer telah tercapai. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 36 Gambar 2.21 Blok Fungsi Timer 2.7.3.4.6 Counter Counter berfungsi untuk menghitung jumlah perubahan input, dapat untuk membatasi banyaknya perubahan input. Ada dua jenis counter yaitu menghitung naik (up-counter) dan turun (down-counter). Dalam kehidupan sehari-hari terdapat juga counter mekanik dan elektronik. Counter akan mengeluarkan nilai 0 atau 1 bila nilai preset telah tercapai. Ada juga step counter dimana perubahan input akan ditampilkan pada setiap alamat output tertentu. Gambar 2.22 Blok Fungsi Counter Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 37 2.7.3.4.7 Compare Block Instuksi compare block yang ada pada PLC Twido digunakan untuk membandingkan dua operand. Tabel 2.1 merupakan daftar tipe dari instruksi perintah compare block. Tabel 2.1 Daftar tipe instruksi compare block Instruksi Fungsi > Digunakan jika operand satu lebih besar dari operand dua. >= Digunakan jika operand satu lebih besar atau sama dengan operand dua. < Digunakan jika operand satu lebih kecil dari operand dua. <= Digunakan jika operand satu lebih kecil atau sama dengan operand dua. = Digunakan jika operand satu lebih sama dengan operand dua. <> Digunakan jika operand satu lebih berbeda dengan operand dua. 2.8 Supervisory Control And Data Acquisition (SCADA) Supervisory Control And Data Acquisition (SCADA) diambil dari dua kata, yaitu: 1. Supervisory Control adalah sistem yang berfungsi untuk memberikan instruksi kendali dan mengawasi kerja suatu proses tertentu. 2. Data Acquisition adalah sistem yang berfungsi untuk mengambil, mengumpulkan, dan memproses data untuk kemudian disajikan sesuai kebutuhan yang dikehendaki. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 38 Supervisory Control And Data Acquisition (SCADA) adalah sistem berbasis computer yang dapat melakukan pengawasan, pengendalian, dan akuisisi data terhadap suatu proses tertentu secara real time. 2.8.2 Arsitektur SCADA Arsitektur dari SCADA terdiri dari beberapa bagian yang memiliki perannya masing-masing, yaitu: 1. Plant/field device adalah suatu proses dilapangan yang diwakili oleh sensor dan aktuator. 2. RTU (Remote Terminal Unit) adalah yang berupa PLC, berfungsi pengendali plant/field device, mengirim sinyal kontrol, mengambil data dari plant, dan mengirim data ke MTU. 3. MTU (Master Terminal Unit) adalah berupa PLC yang bertindak sebagai master bagi RTU, berfungsi mengumpulkan data dari satu atau beberapa RTU, melakukan koordinasi dengan memberi perintah ke RTU untuk menjaga proses berjalan dengan stabil dan memberikan data ke server/HMI. 4. HMI (Human Machine Interface) adalah alat untuk menampilkan data pada suatu perangkat yang komunikatif dan animatif, dan menyediakan antarmuka untuk komunikasi antara mesin dan manusia (operator). 5. Protokol komunikasi adalah sebuah aturan atau standar yang mengatur atau mengijinkan terjadinya hubungan, komunikasi, dan perpindahan data antara dua atau lebih titik komputer. 6. Database server adalah sebuah perangkat yang bekerja untuk mencatat atau menyimpan data pengendalian pada sistem SCADA . Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 39 Gambaran sederhana dari arsitektur SCADA seperti pada Gambar 2.23. Gambar 2.23 Arsitektur SCADA (https://amarnotes.wordpress.com/2013/06/29/apa-itu-scada/) 2.8.3 Pengenalan Software Vijeo Citect Vijeo citect adalah salah satu software program yang digunakan pada industri otomatis yang memiliki tingkat efisiensi yang tinggi pada semua operasi dengan sistem cepat, open system architecture, fungsi network yang powerfull. Pada Vijeo Citect terdiri dari dua program, yaitu Vijeo Citect Explorer dimana ini digunakan untuk proses editing dan Vijeo Citect Runtime digunakan untuk proses running dari sebuah tampilan yang akan dimonitor. Vijeo Citect dapat diaplikasikan pada sistem dengan skala besar dan juga pada sistem skala kecil. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 40 2.8.3.1 Kelebihan Pada Vijeo Citect 1. Open system architecture Open system architecture memberikan kemudahan secara khusus bagi pengguna yang berbeda-beda, menyediakan fleksibilitas yang tinggi untuk melakukan hubungan dengan system software lain diantaranya. 1. Vijeo Citect didukung tiga buah tampilan yaitu Citect Explorer, Citect Project Editor, Citect Graphics Builder dan aplikasi program diluar Vijeo Citect dengan mudah mendapatkan data dari Vijeo Citect. 2. Hubungan Vijeo Citect dengan tags biasa menggunakan events. 3. Vijeo Citect dapat membuka Vijeo Citect –net protocol dengan menggunakan folder communication yang ada pada Citect Explorer, yang digunakan untuk menukar data antara Vijeo Citect yang lain. Data dari Vijeo Citect dapat di set atau mengikuti sambungan high level host computer. 2. Mendukung bermacam-macam networking 1. Vijeo citect didukung bermacam-macam protocol. 2. Struktur network Vijeo Citect dapat didukung sistem kerja yang berdiri sendiri, peer to peer, client / server, dan hal seperti ini dapat dilakukan pada sistem dengan skala besar maupun sistem dengan skala kecil. 3. Pembuatan Layar Grafis dengan Mudah Pada vijeo citect telah disediakan bermacam-macam type wizard dan symbol library, dengan didukung tampilan Citect Graphics Builder sistem dapat Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 41 dikonfigurasi dengan mudah sehingga pembuatan animasi tidak begitu sulit karena obyek yang kita inginkan sudah tersedia pada symbol library tools. 4. Supporting Internet Pada Vijeo Citect dapat dilakukan pengoperasian suatu plant yang dapat terhubung melalui jaringan komunikasi yang terdapat di internet. Fungsi yang digunakan terdapat pada web server sehingga status plant dapat dimonitor dan dikontrol melalui web browser dari tempat kendali yang memiliki jarak cukup jauh. 5. Data yang Kompatibel dengan Software Lain 1. Data pada tag, kompatibel antara Microsoft Excel dengan Vijeo Citect 2. Data hasil pengoperasian dari Vijeo Citect dapat di convert ke Microsoft Excel dan Word 3. Dapat dilakukan penukaran data dari software grafis seperti AutoCad, Photoshop, CorelDraw, dll 2.8.3.2 Outline Vijeo Citect Explorer Nama dari file eksekusi Vijeo Citect adalah Vijeo Citect. Cara pertama untuk menjalankan Vijeo Citect adalah klik “Program” pada Start menu lalu klik “Schneider Electric” kemudian klik “SoCollaborative” selanjutnya klik “Vijeo Citect 7.20” dan pilih Vijeo Citect Explorer. Setelah dipilih Vijeo Citect Explorer maka akan terdapat tiga tampilan dasar yang dapat digunakan untuk manajemen data dan file, membuat desain grafis, dan mengeksekusi atau menjalankan sistem. Ketiga tampilan tersebut antara lain: Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 42 1. Citect Explorer Citect Explorer merupakan tampilan yang digunakan untuk membuat dan pembuatan project. Selain itu juga dapat mengatur semua file-file yang berada pada sub bagian folder project, sehingga berfungsi seperti Windows Explorer pada Windows. Citect Explorer juga berfungsi untuk mengatur setup komunikasi pada pembuatan project baru. Gambar 2.24 Tampilan citect explorer 2. Citect Project Editor Citect Project Editor digunakan sebagai tempat untukk membuat, mengatur, dan mengedit database. Database yang dibuat pada citect project editor berupa cluster, tags, event, alarm, dll. Untuk membuat database diatas dapat dilihat pada menu-menu yang disediakan pada citect project editor. Untuk membuat cluster name dapat dilihat pada menu servers. Pada menu tags terdapat dua cara untuk membuat alamat nama tags yaitu variable tags dan local variable, dimana untuk menggunakan Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 43 variable tags harus langsung terhubung dengan I/O devices sedangkan local variable tidak perlu terhubung langsung dengan I/O devices dan dapat langsung disimulasikan. Pada halaman citect project editor setelah membuat atau melakukan pengeditan database perlu dilakukan pack dan compile, sehingga data yang telah dibuat dapat tersusun secara baik dan jika terjadi error maka dapat diketahui letak kesalahannya. Untuk melakukan pack dan compile dapat dilihat pada menu file. Gambar 2.25 Tampilan citect project editor 3. Citect Graphic Builder Citect Graphic Builder digunakan untuk membuat serta mengedit desain animasi plant pada sistem monitor dan juga memberikan label atau nama pada desain masing-masing animasi yang akan dibuat. Selain itu dapat memasukan gambar dan simbol dari luar yang bias dimodifikasi. Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016 44 Gambar 2.26. Tampilan citect graphics builder Sistem Kendali Konveyor…, Didik Satria Yogaswara, Fakultas Teknik UMP, 2016