- Politeknik Negeri Sriwijaya
advertisement

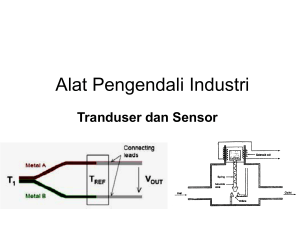
BAB II TINJAUAN PUSTAKA Dalam pembuatan robot pengangkat dan pemindah barang ini membutuhkan komponen – komponen untuk mendapatkan hasil yang diharapkan adapun komponen –komponen yang digunakan adalah : 2.1 Joystick Joystick adalah alat inputan komputer yang berwujud tuas dan dapat bergerak ke segala arah, yang dapat mentransmisikan arah sebesar dua atau tiga dimensi ke komputer. Joystick pada umumnya digunakan sebagai pelengkap untuk memainkan permainan video yang dilengkapi lebih dari satu tombol. Joystick juga dapat dijadikan sebagai alat pengendali sebuah alat elektronik maupun sebuah robot yang berwujud tuas atau yang terdiri dari banyak switch. Joystick dapat digunakan untuk mengendalikan sebuah mesin seperti mesin derek, truk, kursi roda, kamera pengawas, mesin pemotong rumput dan juga dapat digunakan untuk mengendalikan sebuah robot manual pengangkat dan pemindah barang. ( Dikutip dari : http://id.wikipedia.org/wiki/Tuas_kendali tanggal 4 juni 2014 Pukul 11.46 WIB) 2.1.1 Karakteristik Joystick Joystick yang digunakan pada robot manual pengangkat dan pemindah barang memiliki karakteristik sebagai berikut : 1. Switch : Menggunakan saklar-saklar dua keadaan sebagai pemberi input ke mikrokontroler. 2. Wiring :Menggunakan kabel dan konektor DB9 sebagai penghubung dari joystick menuju mikrokontroler. 3. Power Supply : Membutuhkan tegangan dc untuk dapat mengaktifkan joystick. 4. Sebuah joystick terdiri dari beberapa switch yang dipasang pada sebuah rangkaian. 5 6 Politeknik Negeri Sriwijaya 2.1.2 Prinsip Kerja Joystick Gambar 2.1 Rangkaian joystick ( sumber : httpwww.zen35383.zen.co.ukstnieldusb2psx.gif) Joystick merupakan piranti pengendali tak langsung, gerakan robot dikendalikan oleh gerakan tuas (pada joystick absolut) atau dengan tekanan pada tuas. Pada joystick biasanya terdapat tombol yang dapat dipilih atau diaplikasikan dengan papan ketik. Joystick digunakan untuk mengendalikan robot manual pengangkat dan pemindah barang agar bergerak dan dapat memindahkan barang, dalam pengoperasiannya, joystick tidak memerlukan tempat yang luas. Setelah tombol pada joystick ditekan maka data akan dikirimkan menuju Smart Pheriferal Converter (SPC) untuk diproses. Gambar 2.2 Foto Joystick (sumber: http://labsky2012b.blogspot.com ) 7 Politeknik Negeri Sriwijaya 2.2 Mikrokontroller Mikrokontroler adalah merupakan komputer dalam chip yang mampu memproses data dan telah dilengkapi memori walaupun dengan kapasitas yang masih sangat terbatas namun juga dilengkapi dengan saluran I/O yang berfungsi untuk melakukan komunikasi dengan sistem elektronika diluarnya, dimana semua bagian yang diperlukan untuk suatu kontroler sudah dikemas dalam satu keping suatu IC dengan kepadatan yang sangat tinggi, biasanya terdiri dari: a. CPU (Central Processing Unit) b. RAM (Random Access Memory) c. EEPROM/EPROM/PROM/ROM d. I/O, Serial & Parallel e. Timer f. Interupt Controller Rata-rata mikrokontroler memiliki instruksi manipulasi bit, akses ke I/O secara langsung dan mudah, dan proses interupt yang cepat dan efisien. Dengan kata lain mikrokontroler adalah " Solusi satu Chip" yang secara drastis mengurangi jumlah komponen dan biaya disain (harga relatif rendah). Dalam mikrokontroler juga terdapat piranti pendukung lainnya seperti ADC, DAC, serta piranti komunikasi. Sehingga mampu untuk mengontrol rangkaian elektronik di luarnya. Untuk merancang sebuah sistem yang berbasis mikrokontroler, kita memerlukan perangkat keras dan perangkat lunak yaitu: a. Sistem minimum mikrokontroler b. Software pemrograman dan kompiler, serta downloader 2.2.1 Arsitektur ATMega 164P Mikrokontroler yang digunakan adalah mikrokontroler ATMega164P, dimana mikrokontroler jenis ini dibuat dengan teknologi CMOS (Complementary Metal Oxide Semiconductor ) dengan konsumsi daya rendah. Mikrokontroler ini berbasis AVR RISC (Reduced Instruction Set Computing) yang mengeksekusi instruksi program dalam satu siklus clock, hal ini dimungkinkan karena AVR menggunakan arsitektur Havard yaitu dimana bus serta memori untuk 8 Politeknik Negeri Sriwijaya instruksi dan data dipisahkan. Instruksi pada memori program dieksekusi dengan pipeline satu tingkat yaitu sewaktu satu instruksi dieksekusi instruksi berikutnya diumpankan/pre-fetched dari memori program, beda dengan arsitektur VonNeuman dimana mikrokontroler memiliki sebuah data bus yang dipergunakan untuk "fetch" instruksi dan data. Program (instruksi) dan data disimpan pada memori utama secara bersama-sama. Gambar 2.3 Diagram Blok arsitektur AVR (sumber : www.atmel.com/images/doc7674.pdf) Ketika kontroler mengalamati suatu alamat di memori utama, hal pertama yang dilakukan adalah mengambil instruksi untuk dilaksanakan dan kemudian mengambil data pendukung dari instruksi tersebut. Cara ini memperlambat operasi mikrokontroler. Semua register mikrokontroler AVR yang ada dihubungkan dengan Arithmatic Logic Unit (ALU), dua register yang berbeda dapat diakses dalam satu siklus clock. Hal ini membuatnya jauh lebih cepat sepuluh kali dibanding dengan mikrokontroler yang berbasis CISC ( Complex Instruction Set Computing). 9 Politeknik Negeri Sriwijaya Gambar 2.4 Pewaktuan eksekusi program secara paralel (sumber : www.atmel.com/images/doc7674.pdf) Sifat spesial dari mikrokontroler adalah kecil dalam ukuran, hemat daya listrik serta flexibilitasnya menyebabkan mikrokontroler sangat cocok untuk dipakai sebagai pencatat/perekam data pada aplikasi yang tidak memerlukan kehadiran operator. ALU (Arithmatic Logic Unit) adalah processor yang bertugas mengeksekusi (eksekutor) kode program yang ditunjuk oleh program counter. Program Memory adalah memori Flash PEROM yang bertugas menyimpan program (software) yang telah di compile berupa bilangan heksa atau biner Counter (PC) adalah komponen yang bertugas menunjukkan ke ALU alamat program memori yang harus diterjemahkan kode programnya dan dieksekusi. 32 General Purpose Working Register (GPR) adalah register file atau register kerja (R0 –R31) yang mempunyai ruangan 8-bit. Tugas GPR adalah tempat ALU mengeksekusi kode-kode program, setiap intruksi dalam ALU melibatkan GPR . GPR terbagi dua yaitu kelompok atas (R16-R31) dan kelompok bawah (R0-R15), dimana kelompok bawah tidak bisa digunakan untuk mengakses data konstan secara lansung, dan hanya bisa digunakan antarregister, SRAM, atau register I/O. Sedangkan kelompok atas sama dengan kelompok bawah hanya mengeksekusi data konstan secara langsung. Static Random Acces Memory (SRAM) adalah RAM yang bertugas menyimpan data sementara, mempunyai alamat dan ruang data. Alamat terakhir dari SRAM bergantung pada kapasitas SRAM yang sudah didefenisikan dalam 10 Politeknik Negeri Sriwijaya file header dengan nama RAMEND. Internal Pheripheral adalah peralatan/modul internal yang ada dalam mikrokontroler seperti saluran I/O, Interupsi eksternal, Timer/Counter, USART, EEPROM dan lain-lain. Tiap peralatan internal mempunyai register port (register I/O) yang mengendalikan peralatan internal tersebut. 2.2.2 Sistem Minimum ATMega 164P Agar mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang disebut dengan sistem minimum. Pada dasarnya sistim minimum mikrokontroler AVR (Alf and Vegard‟s RISC prosesor) memiliki prinsip yang sama yang terdiri dari 4 bagian yaitu: a. Prosesor, yaitu mikrokontroler itu sendiri b. Rangkaian reset agar mikrokontroler dapat menjalankan program mulai dari awal (tersedia di dalam mikrokontroler) c. Rangkaian clock yang digunakan untuk memberi detak pada CPU (tersedia didalam mikrokontroler) d. Rangkaian catu daya, yang digunakan untuk memberi sumberdaya. Gambar 2.5 Sistem minimum mikrokontroler ATMega 164 (www. Scrib.com/doc/5204/BAB-1) 11 Politeknik Negeri Sriwijaya 2.2.3 Memori ATMega 164P Pengaturan memori dalam mikrokontroler merupakan bagian yang sangat penting, karena keterbatasan memori sehingga harus digunakan seefisien dan seefektif mungkin. AVR mempunyai arsitektur Harvard dimana bus memori program dan bus memori data terpisah, sehingga dapat mengakses memori data dan memori program dalam satu waktu. Hal paling utama yang harus diperhatikan dalam manajemen memori adalah peta memori karena dari peta tersebut terlihat jelas jenis memori dan kapasitasnya. Gambar 2.6 Peta Memori Atmega 164P (sumber : www.atmel.com/images/doc7674.pdf ) Memori Atmega secara umum terbagi tiga yaitu: a. Memori Flash adalah memori ROM tempat kode-kode program berada , memori flash terbagi dua bagian yaitu bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian tempat kode-kode aplikasi sedang bagian boot adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram untuk menulis programmer/downloader, bagian misalnya aplikasi melalui tanpa USART, juga melalui dapat digunakan sebagai tambahan program memori untuk aplikasi apabila kode program hasil kompilasi besar. b. Memori Data Merupakan memori RAM yang digunakan untuk keperluan program memori data , memori ini terbagi empat bagian yaitu: 32 General Purphose Register (GPR) adalah register khusus 12 Politeknik Negeri Sriwijaya untuk membantu ALU dalam mengeksekusi program. Setiap instruksi assembler selalu melibatkan GPR.I/O register dan Additional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheriperal dalam mikrokontroler seperti pin port, timer/counter, usart, dan lain-lain dalam MCS51 dikenal dengan SFR (Special Fuction Register) c. EEPROM Adalah memori data yang dapat menyimpan data walaupun power supply chip mati (non volatile) digunakan untuk menyimpan data yang tahan terhadap gangguan catu daya. Berikut Fitur dari ATMega164P 1. 8-bit AVR berbasis RISC denga ferforma tinggi dan konsumsi daya Rendah 2. Kecepatan maksimal 16 MHz, throughputs 1 MIPS per MHz 3. Memori: Non-volatile Memory 4. a. 16K Bytes memory flash dengan kemampuan Read While Write b. 512 Bytes EEPROM yang dapat diprogram saat operasi c. 1 KBytes Internal SRAM Timer/Counter a. Dua buah 8-bit timer/counter b. Satu buah 16-bit timer/counter c. Enam kanal PWM 5. 8 kanal 10-bit ADC 6. Dua Programable Serial USART 7. Master/Slave SPI serial Interface 8. Komparator Analog 9. 6 pilihan sleep mode untuk penghematan daya listrik 10. 32 jalur I/O yang bisa diprogram 11. Tegangan Operasi 4,5 s/d 5,5 V 13 Politeknik Negeri Sriwijaya Gambar 2.7 Pinout Atmega164P (sumber : www.atmel.com/images/doc7674.pdf) Konfigurasi pin Atmega164P - VCC pin catu daya biasanya 5 V - GND sebagai pin Ground - PortA (PA0 ....PA7) merupakan pin I/O dua arah dan dapat diprogram sebagai pin masukan ADC - PortB (PB0 ...... PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu: Timer/Counter, Komparator Analog dan SPI - PortC (PC0 ..... PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu : Two Wire Interface (I2C), Komparator Analog dan Timer Osilator. - PortD (PD0 ...... PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu: Komparator Analog, Interupsi Eksternal dan Komunikasi Serial. - RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. - XTAL1 dan XTAL2 sebagai pin masukan clock eksternal. - AVCC sebagai pin masukan tegangan ADC. 14 Politeknik Negeri Sriwijaya - AREF sebagai pin masukan tegangan referensi analog untuk ADC Gambar 2.8 Blok Diagram Atmega 164P (sumber : www.atmel.com/images/doc7674.pdf) 2.3 Smart Pheriperal Converter ( SPC) Smart Peripheral Controller / SPC GAMEPAD INTERFACE merupakan sebuah modul antarmuka antara manusia dengan peralatan elektronika, robot, maupun mesin-mesin listrik lainnya. Sistem ini terdiri dari sebuah gamepad yang biasa digunakan pada console PlayStation® modul dan sebuah yang digunakan untuk menerjemahkan data-data penekanan pada tombol-tombol digital dan joystick analog di gamepad tersebut menjadi sinyalsinyal digital dan Pulse Width Modulation (PWM). 15 Politeknik Negeri Sriwijaya 2.3.1 Spesifikasi SPC gamepad Daya bisa diperoleh dari baterai 4,8 – 5,5 Volt atau sumber catu daya lain dengan tegangan 9 – 12 Volt.Pin Input/Output kompatibel dengan level tegangan TTL dan CMOS. Kompatibel dengan modul-modul EMS H-Bridge. Terdapat 2 set output PWM dengan frekuensi 300 Hz.Kompatibel dengan gamepad DUALSHOCK®2 untuk PlayStation®2. Mendukung 12 tombol aksi, 4 tombol arah, dan 2 joystick analog pada gamepad.Mendukung mode getar pada gamepad. 2.4 Gerbang Logika Not Gerbang logika atau gerbang logic adalah suatu entitas dalam elektronika dan matematika Boolean yang mengubah satu atau beberapa masukan logic menjadi sebuah sinyal keluaran logic. Pada gerbang logika Not jika inputan bernilai High maka output akan berlogika low sedangkan apabila inputan berlogika low maka keluarannya akan berlogika high input output Gambar 2.9 simbol gerbang Not (sumber : Datasheet IC 7404) IC gerbang logika dasar Not yang sering digunakan adalah tipe TTL karena pada jenis ini supply tegangan sekitar 5 volt , dan pada gambar 2.10 dapat dilihat datasheet IC 7404 yang merupakan gerbang logika dasar Not Gambar 2.10 IC 7404 (Sumber : datasheet IC 7404) 16 Politeknik Negeri Sriwijaya 2.5 Relay Relay adalah merupakan jenis saklar elektromagnetik dan memiliki beberapa parameter penting yaitu rating tegangan operasi ( maksimal dan minimal ), tahanan gulungan tipe dan arus kontaknya, cara kerjanya yaitu apabila pada gulungan dialiri tegangan nominal yang dibutuhkan, sehingga terjadi daya induksi magnetik yang kemudian menggerkan posisi saklar ( posisi On atau Off) (Wahyu:1997,51) Gambar 2.11 Foto Relay ( Sumber : http://telinks.files.wordpress.com/2010/04/relaydriver.jpg?w=595hkan) kontak- kontak dari relay umumnya memiliki tiga dasar pemakaian yaitu : 1. bila kumparan dialiri arus listrik maka kontaknya akan menutup dan disebut sebagai kontak Normally Open ( NO) 2. bila kumparan dialliri listrik maka kontaknya akan membuka disebut dengan kontak Normally Close ( NC) 3. tukar sambung ( Change Over /CO), relay jenis ini mempunyai kontak tengah yang normalnya tertutup tetapi melepaskan diri dari posisi ini dan membuat kontak dengan yang lain bila relay dialiri listrik karena relay mempunyai lilitan maka jika lilitan dialiri arus akan menyebabkan jarak antara lilitan bertindak sebagai kapasitor . dengan kata lain , jika terjadi perubahan arus secara cepat akan menimbulkan tegangan yang sangat besar sehingga dapat merusak relay . oleh karena itu tegangan tersebut perlu dibatasi dengan melewatkanya pada sebuah dioda dan didapatkan rangakaian praktis sebuah relay . adapun rangkaian relay dapat dilihat pada gambar 2.12 17 Politeknik Negeri Sriwijaya Gambar 2.12 Rangkaian Relay (sumber: http://telinks.files.wordpress.com/2010/04/relaydriver.jpg?w=595hkan) 2.5.1 Driver Relay Penggunaan relay sering menjadi pilihan karena relay mudah dikontrol, relay dapat diberi beban yang besar baik beban AC maupun DC, dan sebagai isolator yang baik antara rangkaian beban dengan rangkaian kendali. Rangkaian interface relay dapat dibangun menggunakan konsep transistor sebagai saklar. Transistor yang digunakan untuk driver relay dapat dikonfigurasikan dengan common emitor, emitor follower atau transistor darlington. Teknik interface antara relay dengan rangkaian digital atau rangkaian Mikrokontroller berikut ini adalah rangkaian driver relay dengan menggunakan transistor darlington Gambar 2.13 Rangkaian Driver Relay (sumber : http://elektronika-dasar.web.id/teori-elektronika/interface-relay-kerangkaian-digital/) Pada rangkaian driver relay ini menggunakan hubungan darlington , 18 Politeknik Negeri Sriwijaya hubungan darlington diperoleh dengan cara menggabungkan dua transistor sejenis dan umumnya mempunyai beta yang sama. keuntungan yang diperoleh dengan menggunakan transistor yang dihubungkan darlington adalah impedansi input tinggi, impedansi output rendah dan Ai tinggi. Kemudian penguatan arus pada rangkaian darlington ini dapat dijelaskan dari rumus di bawah ini ß = hfe1 x hfe2 Dari segi tegangan listriknya, voltase base-emitter rangkaian ini juga lebih besar, dan secara umum merupakan jumlah dari kedua tegangan masing-masing transistornya, seperti nampak dalam rumus berikut: VBE = VBE1 +VBE2 2.6 Pneumatik sistem pneumatic bertujuan untuk menggerakan berbagai peralatan dengan menggunakan gas kompresibel sebagai media kerjanya. udara menjadi satu media kerja dalam sistem pneumatik yang paling banyak diguanakan karena jumlahnya tidak terbatas dan haraganya lebih murah. udara yang dikompresi oleh kompressor, didistribusikan menuju berbagai macam aktuator melewati sistem kontrol tertentu. kadang ada juga udara terkrompersi tersebut dicampur dengan automized oil untuk kebutuhan pelumasan pada sistem aktuator. namun yang lebih umum adalah udara terkrompersi yang kering atau telah mengalami prose pengeringan atau air dryer prinsip kerja dan komponen- komponen dari sistem pneumatik hampir sama dengan sistem hidrolik. berikut adalah komponen- komponen pneumatik secara umum 2.6.1 Kompressor Kompressor digunakan untuk menghisap udara di atsmosfer dan memanfaatkan serta menyimpan dalam tangki penampungna dalam tangki penampungan hingga tekanan tertentu 19 Politeknik Negeri Sriwijaya Gambar 2.14 Foto kompressor (Sumber : www.indonetwork.co.id) 2.6.2 catu daya dan gauge Kedua alat tersebut menjadi komponen wajib di setiap sistem pneumatik .regulator adalah alat yang berfungsi untuk mengatur supply udara terkompresi masuk ke dalam sistem pneumatik. sedangkan gauge berfungsi sebagai penunjuk besar tekanan udara di dalam sistem. keduanya dapat berupa sistem mekanis maupun elektrik Gambar 2.15 Foto Gauge (Sumber : Sofware Festo Fludism) 2.6.3 Tangki akumulator Tangki udara bertekanan berfungsi untuk menstabilkan pemakaian udara bertekanan yang dihasilkan oleh kompressor. tangki ini juga berfungsi sebagai cadangan suplai udara darurat ke sistem ke sistem apabila kompressor mengalami 20 Politeknik Negeri Sriwijaya kegagalan. Ukuran tangki udara bertekanan tergantung dari penghantar volume kompressor (debit kompressor ), pemakaian udara konsumen, jenis dari pengaturan jenis kerja kompressor, dan perbedaan tekanan yang didingginkan dalam jaringan Gambar 2.16 Foto Tangki Akumulator (sumber : www. indonetwork.co.id) 2.6.4 Selenoid Valve Pneumatik Solenoid valve pneumatik adalah katup yang digerakan oleh energi listrik, mempunyai kumparan sebagai penggeraknya yang berfungsi untuk menggerakan plunger yang dapat digerakan oleh arus AC maupun DC, solenoid valve pneumatic atau katup (valve) solenoida mempunyai lubang keluaran, lubang masukan dan lubang exhaust, lubang masukan, berfungsi sebagai terminal / tempat udara bertekanan masuk atau supply (service unit), lalu lubang keluaran, berfungsi sebagai terminal atau tempat tekanan angin keluar yang dihubungkan ke pneumatic, sedangkan lubang exhaust, berfungsi sebagai saluran untuk mengeluarkan udara bertekanan yang terjebak saat plunger bergerak atau pindah posisi ketika solenoid valve pneumatic bekerja. Gambar 2.17 Foto Selenoid valve Pneumatik (sumber : software festo fludism ) 21 Politeknik Negeri Sriwijaya Gambar 2.18 Solenoid valve Pneumatik (sumber : https://lh3.googleusercontent.com/xaiK1C0Yafw/U6hcsuaM6HI/AAAAAAAABH8/MY4tkKrSkSE/w1280-h800-pk/Selenoid%2Bvalve.jpg) Berikut keterangan gambar solenoid valve pneumatik: 1. Valve Body 2. Terminal masukan (Inlet Port) 3. Terminal keluaran (Outlet Port) 4. Terminal slot power suplai tegangan 5. Kumparan gulungan (koil) 6. Spring 7. Pluger 8. Lubang / exhaust Solenoid valve adalah elemen kontrol yang paling sering digunakan dalam fluidics. Tugas dari solenoid valve dalah untuk mematikan, release, dose, distribute atau mix fluids. Solenoid Valve banyak sekali jenis dan macamnya tergantung type dan penggunaannya, namun berdasarkan modelnya solenoid valve dapat dibedakan menjadi dua bagian yaitu solenoid valve single coil dan solenoid valve double coil keduanya mempunyai cara kerja yang sama. Solenoid valve banyak digunakan pada banyak aplikasi. Solenoid valve menawarkan switching cepat dan aman, keandalan yang tinggi, awet/masa service yang cukup lama, kompatibilitas media yang baik dari bahan yang digunakan, daya kontrol yang rendah dan desain yang kompak. 22 Politeknik Negeri Sriwijaya Solenoid valve mempunyai banyak variasi dalam hal kegunaan atau kebutuhan dari mesin tersebut, diantara kegunaan solenoid valve adalah: Digunakan untuk menggerakan tabung cylinder. Digunakan untuk menggerakan piston valve. Digunakan untuk menggerakan blow zet valve. Dan masih banyak lagi. 2.6.5 Aktuator Pneumatik Aktuator adalah bagian akhir dari sistem pneumatik yang berfungsi mengubah energi suplai angin bertekanan menjadi energi kerja. pada prinsipnya aktuator terbagi menjadi dua yaitu aktuator gerak lurus ( slinder ) dan aktuator gerak memutar ( motor Pneumatik ). Pada robot ini aktuator yang diguanakan adalah aktuator tipe gerak lurus ( silinder) dari aktuator tipe gerak lurus terbagi dari beberapa macam dan pada robot ini digunakan jenis slinder kerja ganda (hanif said, 2012 : 54 ) aktuator pneumatik ini diguanakan karena memiliki kelibihan antara lain - Kendali gripper yang mudah dengan hanya menggunakan katup solenoid sebagai kontrol pembuka dan penutu katup. - Daya jepit gripper lebih kuat dibanding dengan motor. - Ringan - Lebih fleksibel, dapat diletakkan dimana saja. 2.6.5.1 Silinder Kerja Tunggal Silinder kerja tunggal adalah aktuator yang digerakkan oleh udara bertekanan pada satu sisi saja sehingga hanya menghasilkan kerja dalam satu arah. Untuk gerak baliknya digunakan tenaga yang didapat dari pegas yang telah terpasang didalam silinder tersebut sehingga kecepatannya tergantung dari pegas yang dipakai. 23 Politeknik Negeri Sriwijaya Gambar 2.19 Foto Silinder kerja tunggal Sumber : (software festo Fludism) 2.6.5.2 Slinder kerja ganda Prinsip kontruksi slinder kerja ganda adalah sama dengan slinder kerja tunggal. tetapi tidak memiliki pegas pengembali dan dua lubang saluran dipakai sebagai saluran masukan dan saluran pembuangan. slinder kerja ganda mempunyai keuntungan yaitu bisa dibebani pada kedua arah gerakan batang pistonya. ini memungkinkan pemasanganya lebih fleksibel. Gaya yang diberikan pada batang piston adalah lebih besar untuk gerakan keluar daripada gerakan masuk. karena efektif permukaan piston dikurangi dari dua sisi batang piston oleh luas permukaan batang piston. Slindder aktif adalah dibawah kontrol suplai udara pada kedua arah gerakanya. Pada prinsipnya panjang langkah slinder dibatasi, walaupun faktor lengkungan dan bengkokan yang diterima batang piston harus diperbolehkan. Seperti dengan slinder kerja-tunggal pada slinder kerja ganda piston dipasang dengan seal jenis cincin O atau membrane ( diafragma ). ( p croser , 1994: 175 ) Gambar 2.20 Foto slinder kerja ganda ( Sumber : Software festo fludism) 24 Politeknik Negeri Sriwijaya 2.6.6 Komponen Pendukung Pneumatik Selain komponen utama di atas, sistem pneumatik, khususnya elektro pneumatic, juga mempunyai beberapa komponen pendukung, antara lain 2.6.6.1 Selang jika sistem kontrol listrik menggunakan kabel sebagai media penghantar arus listrik maka pada sistem pneumatik digunakan selang dengan diameter yang bervarariasi, tergantung kekuatan energi udara bertekanan yang melewatinya. selang ini biasanya mempunyai sifat elastis atau lentur yang memungkinkan selang dapat diatur maupun ditempatkan sesuai kebutuhan. selang biasanya terbuat dari campuran plastic dan karet agar tidak mudah robek dan mempunyai sifat elastis. Gambar 2. 21 Foto Selang 2.6.6.2 sambungan / Fitting fitting adalah komponen pendukung dari sistem pneumatik yang berfungsi sebagai penghubung antara komponen pneumatik dengan selang sebagai sambungan antar selang. biasanya pada fitting terdapat pengunci sehingga menjamin bahwa selang akan tetap berada pada sambungan apabila udara bertekanan melewatinya (hanifsaid,2012:59) Gambar 2.22 Foto berbagai macam fitting Pneumatik 25 Politeknik Negeri Sriwijaya 2.6.6.3 Silincer Silincer adalah komponen pendukung dalam sistem pneumatik yang berfungsi untuk meredam suara bising saat ada tekanan udara keluaran yang dibuang ke terminal R atau S. Pada katup kontrol arah, silincer dipasang pada terminal R dan S. Gambar 2.23 Foto silincer 26 Politeknik Negeri Sriwijaya