Vektor Dimensi 2 dan 3_Iffatul dan Tim.
advertisement

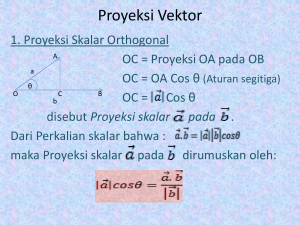
Vektor-Vektor dalam Ruang Berdimensi-2 dan Ruang Berdimensi-3 Disusun oleh: Achmad Fachrurozi Albert Martin Sulistio Iffatul Mardhiyah Rifki Kosasih Departemen Matematika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Indonesia 2010 Vektor-Vektor Dalam Ruang Berdimensi-2 dan Ruang Berdimensi-3 3. 1 Pengantar Vektor (Geometris) Vektor bisa disajikan secara geometris sebagai ruas garis berarah atau panah dalam ruang berdimensi-2 atau ruang berdimensi-3. Arah panah menentukan arah vektor, dan panjang panah menentukan panjang vektor. Ekor dari panah tersebut disebut titik pangkal vektor, dan ujung panah disebut titik ujung vektor. Vektor dilambangkan huruf kecil cetak tebal (misalnya a, b, v, w, dsb). Ketika mendiskusikan vektor, semua bilangan riil disebut skalat, dan dilambangkan huruf kecil cetak miring (misalnya, a, b, k, m, dsb). Jika titik pangkal suatu vektor v adalah A, dan titik ujungnya adalah B, maka dituliskan v AB . Vektor-vektor yang panjang dan arahnya sama disebut ekuivalen atau dapat dipandang sama (walaupun terletak dalam posisi berbeda). Jika v dan w ekuivalen maka dituliskan v = w. Definisi Jika v dan w adalah dua vektor sebarang, maka jumlah v+w adalah vektor yang ditentukan sebagai berikut: Letakkan vektor w sedemikian sehingga titik pangkalnya bertautan dengan titik ujung vektor v. Vektor v+w disajikan oleh panah dari titik pangkal v hingga ke titik ujung w. Berikut ilustrasinya Berdasarkan gambar diatas terlihat bahwa v+w = w+v dan jumlah dua vektor tersebut adalah diagonal dari jajargenjang yang ditentukan oleh v dan w dengan kedua titik pangkalnya sama. Vektor yang panjangnya nol disebut vektor nol dan dinyatakan dengan 0. Didefinisikan bahwa 0+v = v+0 = v untuk sebarang vektor v. Vektor nol mempunyai sebarang arah yang sesuai dengan keadaannya. Jika v adalah sebarang vektor tak-nol, maka –v (yaitu negatif dari v) adalah vektor yang besarnya sama dengan v tetapi arahnya terbalik. Vektor –v ini mempunyai sifat v+(v) = 0. Didefinisikan pula -0 = 0. Definisi Jika v dan w adalah dua vektor sebarang, maka selisih w dari v didefinisikan sebagai v-w = v+(-w) Definisi Jika v adalah suatu vektor tak-nol dan k adalah suatu skalar tak-nol, maka hasil kali kv adalah vektor yang panjangnya kali panjang v dan arahnya sama dengan arah v jika k > 0 dan berlawanan dengan arah v jika k < 0. Didefinisikan kv = 0 jika k = 0 atau v = 0. Vektor kv tersebut disebut penggandaan skalar dari v. Vektor-vektor yang merupakan penggandaan skalar satu sama lain adalah sejajar. Begitu pula sebaliknya. Vektor-vektor dalam sistem Koordinat Anggap v adalah sebarang vektor pada bidang dan asumsikan bahwa v diletakkan sehingga titik pangkalnya berada pada titik asal sistem koordinat segi empat. Misalkan titik ujung v adalah titik (v1 , v2 ) dalam ruang berdimensi-2. Koordinat dari titik ujung v tersebut disebut komponen v dan ditulis v = (v1 , v2 ) Dengan memperhatikan hal diatas maka jika vektor-vektor yang ekuivalen diletakkan sehingga titik pangkalnya berada di titik asal, maka jelas bahwa titik ujungnya harus berhimpit. Jadi vektor-vektor tersebut mempunyai komponen yang sama. Sehingga dapat disimpulkan bahwa dua vektor v = (v1 , v2 ) dan w = (w1 , w2 ) dikatakan ekuivalen jika dan hanya jika v1 w1 dan v2 w2 . Operasi penjumlahan vektor dan perkalian vektor dengan skalar mudah dilakukan dalam bentuk komponen. Berikut ilustrasi untuk penjumlahan vektor dan perkalian vektor dengan skalar. Penjumlahan vektor Perkalian vektor dengan skalar Berdasarkan gambar tersebut, Jika v = (v1 , v2 ) dan w = (w1 , w2 ) didapat v+w = (v1 w1 , v2 w2 ) dan kv = (kv1 , kv2 ) . Lalu, karena v-w = v+(-1)w, maka berdasarkan operasi penjumlahan dan perkalian skalar diatas, didapat v-w = (v1 w1 , v2 w2 ) . Vektor-Vektor dalam ruang berdimensi-3. Sistem koordinat segi empat dalam ruang berdimensi-3 memiliki tiga sumbu koordinat yang saling tegak lurus, diberi nama sumbu x, y dan z. Setiap pasangan koordinat menentukan suatu bidang yang disebut bidang koordinat, yaitu bidang-xy, bidang-xz dan bidang-yz. Untuk setiap titik P dalam ruang berdimensi-3 diberikan tiga pasangan terurut (x, y, z) yang disebut koordinat titik P. Berikut contoh penyusunan titik-titik yang koordinatnya adalah (4, 5, 6) dan (-3, 2, -4) Sistem koordinat dalam ruang berdimensi-3 mempunyai dua kategori, yaitu sistem tangan-kiri dan tangan-kanan. Berikut ilustrasinya. Dalam pembahasan disini hanya akan digunakan sistem tangan-kanan. Berdasarkan pembahasan sebelumnya, mengenai komponen suatu vektor dalam ruang berdimensi-2, maka didapat pula pernyataan untuk komponen untuk vektor-vektor dalam ruang berdimensi-3 sebagai berikut v = (v1 , v2 , v3 ) dan w = ( w1 , w2 , w3 ) Dua vektor v dan w ekuivalen jika dan hanya jika v1 w1 , v2 w2 dan v3 w3 v+w = (v1 w1 , v2 w2 , v3 w3 ) kv = (kv1 , kv2 , kv3 ) dan v-w = (v1 w1 , v2 w2 , v3 w3 ) Contoh: Jika v = (1, -3, 2) dan w = (4, 2, 1), maka v+w = (5, -1, 3) 2v = (2, -6, 4) -w = (-4, -2, -1) dan v-w = (-3, -5, 1) Kadang suatu vektor titik pangkalnya tidak berada dititik asal. Jika vektor P1 P2 mempunyai titik pangkal P1 ( x1 , y1 , z1 ) dan titik ujung P2 ( x2 , y2 , z2 ) , maka PP 1 2 ( x2 x1 , y2 y1 , z2 z1 ) Hal ini dapat dilihat pada gambar berikut. Vektor P1 P2 adalah selisih vektor OP2 dan vektor OP1 , sehingga PP 1 2 OP2 OP1 ( x2 , y2 , z2 ) ( x1 , y1 , z1 ) ( x2 x1 , y2 y1 , z2 z1 ) Jadi komponen P1 P2 diperoleh dengan pengurangan koordinat titik pangkal dari koordinat titik ujung. Pergeseran Sumbu Penyelesaian atas banyak permaslahan bisa disederhanakan dengan menggeser sumbu koordinat untuk memperoleh sumbu baru yang sejajar dengan sumbu aslinya. Berikut adalah ilustrasinya. Pada gambar diatas, sumbu suatu sistem koordinat-xy telah digeser sehingga diperoleh suatu sistem koordinat-x’y’ yang titik asalnya adalah O’ yang berada pada titik (k, l) dalam koordinat-xy. Suatu titik P pada ruang berdimensi-2 sekarang mempunyai koordinat (x, y) dan (x’, y’). Untuk melihat kaitan antar kedua koordinat tersebut, tinjau vektor O’P . Pada sistem koordinat-xy titik pangkalnya adalah (k, l) dan titik ujungnya adalah (x, y), sehingga O’P = (x-k, y-l). Sedangkan pada sistem koordinat-x’y’ titik pangkalnya adalah (0,0) dan titik ujungnya adalah (x’, y’), sehingga O’P = (x’, y’). Oleh karena itu diperoleh x’ = x-k dan y’ = y-l Rumus tersebut dinamakan persamaan pergeseran. Contoh: Anggap suatu sistem koordinat-xy digeser sehingga diperoleh suatu sistem koordinatx’y’ yang titik asalnya mempunyai koordinat-xy (k, l) = (4, 1) a) Carilah koordinat-x’y’ dari titik dengan koordinat –xy P(2, 0) b) Carilah koordinat-xy dari titik dengan koordinat-x’y’ Q(-1, 5) Penyelesaian: a) Persamaan pergeserannya adalah x’ = x-4 dan y’ = y-1. Sehingga koordinat-x’y’ dari titik P adalah x’ = 2-4 = -2 dan y’ = 0-1 = -1. Jadi dalam koordinat-x’y’ P(-2, -1) b) Persamaan pergeseran dapat ditulis pula menjadi x = x’+4 dan y = y’+1. Sehingga koordinat-xy dari titik Q adalah x =-1+4 = 3 dan y = 5+1 =6. Jadi dalam koordinat-xy Q(3, 6). 3.2 NORMA SUATU VEKTOR ; ARITMATIKA VEKTOR Pada bagian ini kita akan menetapkan aturan dasar dari aritmatika vektor SIFAT-SIFAT OPERASI VEKTOR Teorema : Jika u, v, w adalah vektor-vektor dalam ruang berdimensi 2 dan berdimensi 3 dan k dan l adalah skalar, maka hubungan berikut ini berlaku. a) u + v = v + u b) (u+v)+w = u+(v+w) c) u + 0 = 0 + u = u d) u + (-u) = 0 e) k(lu) = (kl)u f) k(u+v)=ku + kv g) (k+l) u = ku +lu h) 1u=u NORMA SUATU VEKTOR Panjang suatu vektor u sering disebut sebagai norma u dan dinyatakan sebagai ||u||. Anggap u =(u1 ,u 2 )vektor dalam ruang berdimensi-2. berdasarkan teorema pythagoras kita dapatkan : ||u|| = u12 u 22 Anggap u =(u1 ,u 2 , u 3 )vektor dalam ruang berdimensi-3. berdasarkan teorema pythagoras kita dapatkan : ||u|| = u12 u 22 u 32 suatu vektor bernorma 1 disebut suatu vektor satuan Jika P1 ( x1 , y1 , z1 ) dan P2 ( x2 , y2 , z2 ) adalah dua titik dalam ruang berdimensi -3. maka jarak d antara kedua titik tersebut adalah norma P1P2 P1P2 = (x 2 -x1 , y 2 -y1 , z 2 -z1 ) d= x 2 -x1 y2 -y1 z 2 -z1 2 2 2 contoh : 1. u =(-3,2,1) ||u|| = -3 2 2 1 14 2 2 2. P1 (2, 1, 5) dan P2 (4, 3,1) d= x 2 -x1 d= 4-2 d= 44 2 2 y 2 -y1 z 2 -z1 2 2 (-3)-(-1) 1-(-5) 2 2 3.3 Hasil Kali Titik ; Proyeksi Misalkan u dan v adalah vektor tak-nol dalam R2 atau R3 ,anggap vektor-vektor in telah diposisikan sehingga titik pangkalnya berhimpitan. Sudut antara vektor u dan v adalah dimana Definisi , . Hasil kali titik atau hasil kali dalam Euclidean u . v didefinisikan sebagai Anggap u = (u1, u2, u3) dan v = (v1, v2, v3), sudut antara vektor u dan v adalah ditunjukkan pada gambar di bawah ini. Sesuai aturan cosinus, diperoleh : Karena , maka dan dapat disederhanakan menjadi . Mencari Sudut Antar Vektor dari definisi di atas, sudut antar vektor dapat diperoleh dari . Selanjutnya, dalam memperoleh informasi dari sudut antar dua vektor, teorema di bawah ini dapat digunakan. Teorema Anggap u dan v adalah vektor-vektor dalam R2 atau R3. (a) (b) Jika u dan v adalah vektor tak-nol, sudut antara vektor u dan v adalah # lancip Jika dan hanya jika u . v > 0 # tumpul Jika dan hanya jika u . v < 0 # = , maka Jika dan hanya jika u . v = 0 Vektor – Vektor Ortogonal merupakan vektor-vektor yang tegak lurus. Berdasar teorema (b) di atas; jika u dan v adalah vektor tak-nol, maka = Jika dan hanya jika u . v = 0, artinya u dan v saling tegak lurus (orthogonal), dituliskan . Contoh : Tunjukkan bahwa dalam vektor tak-nol n = (a,b) tegak lurus dengan garis . Penyelesaian. Misal dan Sedemikian sehingga vektor titik yang berbeda garis, maka = . -(*) (*) dapat juga dinyatakan bahwa n dan saling tegak lurus. atau , maka benar Teorema Anggap u dan v adalah vektor-vektor dalam R2 atau R3 dan k adalah suatu skalar, maka: Bukti : (c) Misalkan u = (u1, u2, u3) dan v = (v1, v2, v3), maka Demikian juga dengan . Proyeksi Ortogonal Perhatikan gambar berikut : Dimana Vektor w1 sejajar dengan a, vektor w2 tegak lurus dengan a, dan . Selanjutnya, vektor w1 disebut proyeksi orthogonal dari u pada a atau komponen vektor dari u yang sejajar dengan a, dinyatakan dengan Proya u. karena , maka . Vektor w2 disebut komponen vektor u yang orthogonal terhadap a. Teorema Anggap u dan a adalah vektor-vektor dalam R2 atau R3, a≠0, maka: Komponen vektor dari u yang sejajar dengan a : Komponen vektor dari u yang ortogonal dengan a : Panjang komponen vektor u yang sejajar vektor a bisa diperoleh dari Sehingga akan menghasilkan Jika 𝜃 menyatakan sudut yang dibentuk oleh u dan a, maka 𝐮 ∙ 𝐚 = ‖𝐮‖‖a‖ cos θ sehingga persamaan diatas dapat ditulis sebagai Berikut adalah contoh penggunaan metode vektor untuk menurunkan suatu rumus yaitu rumus jarak dari suatu titik pada bidang ke suatu garis. Contoh. Cari rumus jarak D dimana D adalah jarak antara titik 𝑃0 (𝑥0 , 𝑦0 ) dan garis 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0. Penyelesaiaan. Misalkan titik 𝑄(𝑥1 , 𝑦1 ) adalah sebarang titik pada garis tersebut dan letakkan vektor n = (𝑎, 𝑏) sedemikian sehingga titik pangkalnya ada di Q. Karena vektor n tegak lurus garis 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0 maka jarak D sama dengan panjang proyeksi orthogonal ⃑⃑⃑⃑⃑⃑⃑ 𝑄𝑃0 pada n, perhatikan gambar berikut Dengan menggunakan persamaan sebelumnya diperoleh, dimana Sehingga diperoleh Karena titik 𝑄(𝑥1 , 𝑦1 ) terletak pada garis tersebut sehingga Dengan mensubstitusikan persamaan ini maka diperoleh rumus Cross Product Is a bilinear map R3 × R3 → R3. Let u, v, and w be a vector in R3 and w = u × v then: w∙v=w∙u=0 Meaning: w is perpendicular to both u and v Orientation is important Definition: a× b = |a||b| sinθn where θ is the angle between the vectors a and b Coordinate notation: a × b = (a2b3 − a3b2, a3b1 − a1b3, a1b2 − a2b1) Matrix Definition Geometric meaning: a× b = |a||b| sinθn |a× b| = |a||b| sinθ = area of parallelogram Relationship with dot product: a) u ∙ (u × v) = 0 b) v ∙ (u × v) = 0 c) |u × v|2 = |u|2|v|2-(u ∙ v) 2 d) u ×(v × w) = (u ∙ w)v-(u ∙ v)w (u × v) × w = (u ∙ w)v-(v ∙ w)u Lines and Planes in 3-Space Lines Specify a vector v = (a, b, c) that is parallel to the line Given a point on the line p0=(x0, y0, z0), the vector from p0 to arbitrary point in the line is parallel to v. p0p = tv for any scalar t. Since p0p = (x-x0, y-y0, z-z0) then(x-x0, y-y0, z-z0) = (ta, tb, tc) Equating LHS and RHS, we get the parametric equation for a line in 3-Space Vector form: r = r0 -tv Planes Specify a vector that is a normal to the plane, n = (a, b, c) Given a point on the plane p0=(x0, y0, z0), the vector from p0 to arbitrary point on the plane p0p is perpendicular to n. n∙(p0p) = 0 Since p0p = (x-x0, y-y0, z-z0) then a(x-x0)+b(y-y0)+c(z-z0)=0 specifies the plane Vector form: n ∙ (r-r0)=0