alat ukur gaya dengan flexiforce - Blog UB
advertisement

TUGAS BESAR
MATA KULIAH SISTEM INSTRUMENTASI ELEKTRONIKA
PERANCANGAN ALAT UKUR GAYA DIGITAL MENGGUNAKAN
FLEXIFORCE A201 BERBASIS MIKROKONTROLER ATMEGA 16
Disusun oleh :
ERWAN RIZAL KURNIANTO 105060301111017
VERI HENDRAYAWAN
105060301111004
TEKNIK ELEKTRO
UNIVERSITAS BRAWIJAYA
2012
KATA PENGANTAR
Assalamualaikum wr.wb. Alhamdulillah, puji dan syukur penulis
panjatkan kehadirat Allah SWT yang telah memberikan rahmat dan hidayah-Nya,
sehingga penulis dapat menyelesaikan tugas ini dengan baik. Tugas ini disusun
sebagai tugas mata kuliah Sistem Instrumentasi Elektronika pada semester 5.
Penulis menyadari bahwa tanpa bantuan, bimbingan serta dorongan dari
semua pihak penyelesaian tugas ini tidak mungkin bisa terwujud. Pada
kesempatan ini penulis menyampaikan rasa terima kasih yang sebesar-besarnya
kepada semua pihak yang telah memberikan bantuan serta dukungan baik secara
langsung maupun tidak langsung atas penyusunan tugas ini.
Dalam penyusunan tugas ini, penulis menyadari bahwa tugas ini belumlah
sempurna, karena keterbatasan ilmu dan kendala-kendala lain yang terjadi selama
pengerjaan tugas ini. Untuk itu kritik dan saran sangat diharapkan demi
kesempurnaan tugas ini. Semoga tulisan ini dapat bermanfaat dan dapat
digunakan untuk pengembangan lebih lanjut. Wassalamualaikum wr.wb.
Malang, Oktober 2012
Penulis
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi yang sangat cepat memicu berkembangnya dunia
elektronika yang pada mulanya menggunakan cara konvensional berubah
menggunakan cara modern dengan memanfaatkan kemajuan teknologi. Hal ini
dalam upaya pemenuhan kebutuhan manusia yang semakin meningkat, sehingga
dapat menaikkan kualitas kehidupan dan kesejahteraan bagi manusia.
Bukan hanya di sektor industri, sektor diluar pun tidak luput dari
penggunaan kemajuan teknologi, Misalnya dalam hal pengukuran massa,
pengukuran massa biasa dilakukan secara manual, yaitu dengan timbangan
manual. Hal ini tentu sangat tidak praktis dan kurang akurat. Untuk itu perlu
diciptakan suatu pemodelan atau perancangan instrumentasi untuk menggantikan
cara lama tersebut. Contoh yang lain pada pengukuran beban di pasar swalayan,
pengukuran beban di terminal barang dan ditempat-tempat lainnya yang tersebar
di berbagai wilayah. Hampir semuanya sudah menggunakan teknologi digital
guna mendukung aktivitas yang mereka lakukan.
Dengan latar belakang di atas, dirancanglah suatu instrumentasi
elektronika berupa alat pengukuran gaya yang bisa digunakan untuk pengukuran
massa suatu benda. Sehingga diharapkan pengukuran yang dilakukan lebih
akurat,lebih singkat dalam hal pelayanan dapat lebih baik
1.2 Rumusan Masalah
Bagaimana blok diagram dan sistem kerja alat yang akan dirancang?
Bagaimana perancangan alt ukur gaya digital dengan menggunakan
flexiforce berbasis mikrokontroler ATMega 16?
1.3 Batasan Masalah
Gaya yang dipakai dalam perancangan ini berupa gaya tekan
Gaya yang diberikan ke sensor tidak lebih dari 100lbs (440N)
Diasumsikan op amp yang digunakan adalah op amp ideal
1.4 Tujuan dan Manfaat
1.4.1 Tujuan
Merancang
sebuah
Instrumentasi
Elektronika
berupa
alat
pengukuran gaya yang dapat digunakan untuk pengukuran massa suatu
benda.
1.4.2 Manfaat
Mempermudah pengukuran gaya melalui massa suatu benda
Didapatkan hasil pengukuran yang lebih akurat
BAB II
TUINJAUAN PUSTAKA
2.1 Gaya
Di dalam ilmu fisika, gaya adalah apapun yang dapat menyebabkan
sebuah benda bermassa mengalami percepatan. Gaya memiliki besar dan arah,
sehingga merupakan besaran vektor. Satuan SI yang digunakan untuk mengukur
gaya adalah Newton. Berdasarkan Hukum kedua Newton, sebuah benda dengan
massa konstan akan dipercepat sebanding dengan gaya netto yang bekerja
padanya dan berbanding terbalik dengan massanya.
= percepatan (m/s2)
= gaya (N)
= massa (kg)
Hukum II Newton menyatakan bahwa percepatan sebuah benda
berbanding lurus dengan resultan gaya yangbekerja pada benda tersebut. Resultan
gaya adalah jumlah vektor dari semua gaya yang bekerja pada benda itu. Melalui
kegiatan eksperimen yang ekstensif telah membuktikan bahwa gaya-gaya
bergabung sebagai vektor sesuai aturan yang berlaku pada penjumlahan vektor.
Sebagai contoh, dua gaya yang besarnya sama masing-masing 10 N, digambarkan
bekerja pada sebuah benda dengan saling membentuk sudut siku-siku. Secara
intuitif, kita bisa melihat bahwa benda itu akan bergerak dengan sudut 450.
Dengan demikian resultan gaya bekerja dengan arah sudut 450. Hal ini diberikan
oleh aturan-aturan penjumlahan vektor. Teorema Pythagoras menunjukkan bahwa
besar resultan gaya adalah: FR = (10 N)2 + (10 N)2 = 14,1 N. Seperti yang
ditunjujkkan pada gambar 1.
Gambar 1. Resultan Gaya (Fr)
Penjelasan lain yang mirip, gaya netto yang bekerja pada sebuah benda adalah
sebanding dengan laju perubahan momentum yang dialaminya.
Di fisika, kita memerlukan definisi yang lebih presisi. Kita mendefinisikan
gaya di sini dalam hubungannya dengan percepatan yang dialami benda standar
yang diberikan ketika ditempatkan di lingkungan sesuai. Sebagai benda standar
kita menggunakan silinder platinum yang disimpan di International Bureau of
Weights and Measures dekat Paris dan disebut kilogram standar.
Di fisika, gaya adalah aksi atau agen yang menyebabkan benda bermassa
bergerak dipercepat. Hal ini mungkin dialami sebagai angkatan, dorongan atau
tarikan. Percepatan benda sebanding dengan penjumlahan vektor seluruh gaya
yang beraksi padanya (dikenal sebagai gaya netto atau gaya resultan).
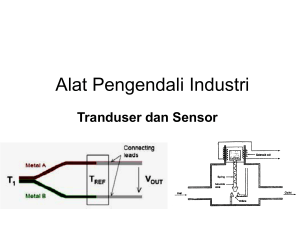
2.3 Sensor
Sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejalagejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi
listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya.
D Sharon, dkk (1982).
Dalam memilih peralatan sensor yang tepat dan sesuai dengan sistem yang
akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini : (D
Sharon, dkk, 1982)
a. Linearitas
Ada banyak sensor yang menghasilkan sinyal keluaran yang berubah secara
kontinyu sebagai tanggapan terhadap masukan yang berubah secara kontinyu.
Sebagai contoh, sebuah sensor panas dapat menghasilkan tegangan sesuai dengan
panas yang dirasakannya. Dalam kasus seperti ini, biasanya dapat diketahui secara
tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa
sebuah grafik. Gambar 1.1 memperlihatkan hubungan dari dua buah sensor panas
yang berbeda. Garis lurus pada gambar 2 (a). memperlihatkan tanggapan linier,
1
Temperatur (masukan)
Temperatur (masukan)
sedangkan pada gambar 2 (b). adalah tanggapan non-linier.
0
Tegangan (keluaran)
100
(a) Tangapan linier
1
0
100
Tegangan (keluaran)
(b) Tangapan non linier
Gambar 2. Keluaran dari Transduser Panas (D Sharon dkk, 1982),
b. Sensitivitas
Sensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap
kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang
menunjukan “perubahan keluaran dibandingkan unit perubahan
masukan”.
Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu
volt per derajat”, yang berarti perubahan
satu derajat pada masukan akan
menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat
saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepakaan
dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi
sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga
akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan
paga gambar 1.1(b) akan lebih peka pada temperatur yang tinggi dari pada
temperatur yang rendah.
c. Tanggapan Waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya
terhadap perubahan masukan. Sebagai contoh, instrumen dengan tanggapan
frekuensi yang jelek adalah sebuah termometer merkuri. Masukannya adalah
temperatur dan keluarannya adalah posisi merkuri. Misalkan perubahan
temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu, seperti
tampak pada gambar 3(a).
Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam satuan
hertz (Hz). { 1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per
detik]. Pada frekuensi rendah, yaitu pada saat temperatur berubah secara lambat,
termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila
perubahan temperatur sangat cepat lihat gambar 3(b) maka tidak diharapkan akan
melihat perubahan besar pada termometer merkuri, karena ia bersifat lamban dan
50
Rata-rata
Temperatur
hanya akan menunjukan temperatur rata-rata.
40
30
Waktu
1 siklus
(a) Perubahan lambat
50
40
30
(b) Perubahan cepat
Gambar 3. Temperatur berubah secara kontinyu (D. Sharon, dkk, 1982)
Ada bermacam cara untuk menyatakan tanggapan frekuensi sebuah sensor.
Misalnya “satu milivolt pada 500 hertz”. Tanggapan frekuensi dapat pula
dinyatakan dengan “decibel (db)”, yaitu untuk membandingkan daya keluaran
pada frekuensi tertentu dengan daya keluaran pada frekuensi referensi.
Macam-macam sensor gaya:
1) Strain Gage
Sensor ini berfungsi untuk mengubah gaya, beban, torsi dan
regangan menjadi resistansi/hambatan. Terbuat dari kawat tahanan
tipis berdiameter sekitar 1 mm. Kawat tahanan yang biasa digunakan
adalah campuran dari bahan konstantan (60 % Cu dan 40 % Ni).
Jenis strain gage yang dibentuk dengan kawat tahanan yang
terpasang lurus dan simetris. Jika papan atau rangka mendapat tekanan
dari luar, maka resistansinya akan bertambah.
Konstruksi strain gage :
Gambar 4. Konstruksi Strain Gage
2) Bourdon Tubes
Sejenis pipa pendek lengkung , dan salah satu ujungnya tertutup.
Jika bourdon tubes diberikan tekanan maka ia akan cenderung untuk
“menegang”. Perubahan yang dihasilkan sebanding dengan besarnya
tekanan yang diberikan.
Gambar 5. Konstruksi Bourdon Tubes
3) flexiforce A201
Sensor flexiforce A201 merupakan sebuah sensor gaya (force) dari
jenis piezoresistive yang mampu mengkonversi nilai gaya(N) ke dalam
bentuk konduktansi elektrik, sensor ini berbentuk printed circuit yang
cukup tipis dan fleksibel.
Gambar 6. Sensor Gaya Flexiforce A201
2.4 Analog to Digital Converter 0804
Analog to Digital Converter adalah sebuah piranti elektronika yang
dirancang untuk dapat mengubah sinyal analog manjadi sinyal digital.
Menggunakan ADC karena pengontrolan dilakukan menggunakan controller
elektronika (mikrokontroller, komputer, atauplc), seihngga sinyal analog yang
berasal dari sensor harus terlebihdahulu diubah menjadi sinyal digital agar dapat
dibaca dan diolah oleh komputer. Pada perancangan ini menggunakan IC ADC
0804 yang dapat memenuhi kebutuhan dari rangkaian yang akan dibuat.
Gambar 7. Pin ADC0804
Keterangan :
WR : ( input ) pin ini digunakan untuk memulai konversi tegangan analog
menjadi data digital, dengan memberikan pulsa logika ” 0 ” pada pin ini.
INT : (output) pin ini digunakan sebagai indicator apabila ADC talah selesai
menkonversikan tegangan analog menjadi digital, dengan mengeluarkan
logika ” 0 “.
Vin : Tegangan analog input deferensial, input Vin (+) dan Vin (-) merupakan
tegangan deferensial yang akan mengambil nilai selisih dari kedua input.
Dengan memanfaatkan input Vin maka dapat dilakukan offset tegangan
nol pada ADC
Vref : Tegangan referensi dapat diatur sesuai dengan input tegangan pada Vin
(+) dan Vin (-), Vref = Vin/2
Clock : Clock untuk ADC dapat diturunkan dari clock CPU atau RC eksternal
dapat
ditambahkan untuk memberikan generator dari dalam. Clock IN
menggunakan schmitt triger.
CS
: Agar ADC dapat aktif melakukan konversi data maka input Chip Select
harus diberi logika low. Data output akan berada pada kondisi three state
apabila CS mendapatkan logika high.
RD : Agar data ADC dapat dibaca oleh sistem mikroprocesor maka pin RD
harus diberi logika low.
2.5 ATMega 16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis
arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi
dieksekusi dalam satu siklus clock. AVR mempunyai32 register general-purpose,
timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal,
serial UART, programmable Watchdog Timer, dan mode power saving, ADC dan
PWM internal. AVR juga mempunyai In-System Programmable Flash on-chip
yang mengijinkan memori program untuk deprogram ulang dalam system
menggunakan hubungan serial SPI. ATMega16. ATMega16 mempunyai
throughput mendekati 1 MIPS per MHz membuat disainer system untuk
mengoptimasi konsumsi daya versus kecepatan proses. Gambar 5 menunjukkan
pin-pin ATMega 16.
Gambar 8. ATmega 16
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP (dual inline
package).
Guna memaksimalkan performa AVR menggunakan arsitektur
Harvard (dengan memori dan bus terpisah untuk program dan data). Gambar 6
menunjukkan Sistem minimum ATmega 16.
Gambar 9. System Minimum ATmega 16
2.5 LCD
LCD adalah suatu jenis media tampilan yang menggunakan kristal cair
sebagai penampil utama. Pada LCD berwarna semacam monitor terdapat banyak
sekali titik cahaya (pixel) yang terdiri dari satu buah kristal cair sebagai sebuah
titik cahaya. Walau disebut sebagai titik cahaya, namun kristal cair ini tidak
memancarkan cahaya sendiri. Sumber cahaya di dalam sebuah perangkat LCD
adalah lampu neon berwarna putih di bagian belakang susunan kristal cair tadi.
Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang
membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan
berubah karena pengaruh polarisasi medan magnetik yang timbul dan oleh
karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan warna
lainnya tersaring.
LCD yang dipergunakan mempunyai spesifikasi sebagai berikut
1) Terdiri atas 32 karakter yang tersusun dalam dua baris (masing-masing
16 karakter) dengan display dot matrik 5 x 7
2) Karakter generator ROM denagan 192 tipe karakter
3) Karakter generator RAM dengan 8 tipe karakter
4) Display data RAM ukuran 80 x 8 bit
5) Catu daya + 5 volt
6) Reset pada saat power on
Bentuk fisik sebuah LCD (Liquid Cristal Display) ditunjukkan gambar 7.
Gambar 10. LCD 2 x 16
Gambar 8 menunjukkan skematik LCD 2x16
Gambar 11. Skematik LCD 2x16
BAB III
BLOK DIAGRAM RANGKAIAN
Untuk mengkonversi perubahan resistansi dari flexiforce A201 diperlukan
suatu rangkaian pengkondisi sinyal, sehingga nantinya data tegangan yang akan
diterima oleh pin ADC dari mikrokontroller sudah termaksimalisasi dan terformat
dengan baik. Secara umum blok diagram rancangan instrumentasi untuk
pengukuran gaya ditunjukkan pada gambar 9.
Sensor
Display
LCD 2x16
Flexiforce
RPS
ADC
0804
MK
ATMega16
Gambar 12. Blok Diagram Rancangan
Agar rangkaian sesederhana mungkin maka catu daya disediakan dari
baterai 9V, pemilihan baterai 9V sebagai catu daya dipertimbangkan dari faktor
space, arus, dan efisiensi. Suatu rangkaian yang baik adalah rangkaian yang
memiliki pencegahan terhadap kondisi-kondisi yang tidak diinginkan, salah
satunya adalah “short circuit” ataupun “human error”, maka dari itu dibentuklah
suatu rangkaian pengaman arus tinggi dan human error.
Pada sensor diberikan catu tegangan negatif 5V, tahanan yang selalu
berubah dari sensor masuk ke rangkaian konversi tegangan yang terdiri dari
penguat inverting. Karena masukanya berupa tegangan negatif maka hasil
konversi tegangan dari penguat inverting akan berupa tegangan positif.
Agar sinyal terhindar dari “noise” maka sebelum masuk ke tahap
selanjutnya sinyal dilewatkan terlebih dahulu ke suatu rangkaian low pass filter.
Barulah keluaran dari low pass filter tersebut diumpankan ke suatu penguat
instrumentasi yang akan mengkonversi teganganya pada level 0 hingga 5V. Tentu
saja penguat instrumentasi akan memerlukan tegangan referensi sebagai
penggeser level tegangan outputnya.
Keluaran penguat instrumentasi yang sudah berada pada level 0 hingga 5V
siap untuk dikonversi menjadi data digital 10bit oleh ADC dari mikrokontroller
Atmega8. Hasil pengolahan data digital yang diimplementasikan melalui program
tersebut akhirnya dikirimkan ke LCD Alphanumeric 2X16 karakter sebagai data
yang siap pakai.
BAB IV
PERANCANGAN RANGKAIAN
4.1 Pemilihan/Perancangan Sensor
Pada perancangan diinginkan bahwa akses data didapatkan dari suatu
rangkaian pengkondisi sinyal yang telah terintegrasi dengan baik, agar data yang
didapat sesuai dengan keinginan. Maka dari itu dibutuhkan sensor gaya yang
bersifat linear dengan output berupa tegangan analog.
Gambar 13. Sensor Gaya Flexiforce A201
Kiranya sensor flexiforce A201, produksi Tekscan Inc cukup untuk
mewakili target-terget perancangan diatas. Sensor flexiforce A201 merupakan
sebuah sensor gaya (force) dari jenis piezoresistive yang mampu mengkonversi
nilai gaya(N) ke dalam bentuk konduktansi elektrik, sensor ini berbentuk printed
circuit yang cukup tipis dan fleksibel. Spesifikasi dari flexiforce A201 adalah
sebagai berikut :
1. Memiliki range deteksi gaya hingga 100lbs, dimana 1lb setara dengan
0.45359N, sehingga jika dikonversi dalam besaran newton flexiforce
A201 memiliki range deteksi 45,359N.
2. Linearitas yang mampu dihasilkan ±3%, dan mampu merespon
perubahan gaya dengan waktu respon <5μs.
3. Mampu bekerja pada rentang suhu -9 ºC hingga 204ºC.
4. Namun pada sensor terjadi “Repeatability” dengan nilai ±2,5% dari fullscale, atau dengan kata lain terjadi ripple pada output sensor.
Pada keadaan tanpa beban, resistansi sensor ini sebesar kurang lebih 5M
ohm. Ketika diberi beban maksimum, resistansi sensor akan turun hingga kurang
lebih 20K ohm. Dari ilustrasi tersebut dapat dilakukan kalkulasi bahwa nilai
resistansi keluaran flexiforce A201 berbanding terbalik dengan gaya yang
diterima olehnya. Jika hubungan beban/gaya dan resistansi tersebut dihubungkan
dalam suatu grafik maka akan didapatkan suatu fungsi linearitas konduktansi-gaya
seperti yang tertera pada gambar 11.
(a)
(b)
Gambar 14. (a) Grafik resistansi & konduktansi terhadap gaya
(b) Grafik estimasi tegangan terhadap gaya
Jika diketahui range perubahan resistansi akibat perubahan gaya yang
mengenai sensor, maka dapat disusun fungsi alih yang akan menentukan bagian
dari rangkaian pengkondisi sinyal.
4.2 Perancangan Rangkaian Pengkondisi Sinyal
4.2.1 Menentukan Fungsi Alih Gaya-Resistansi
Sebagai acuan dari perancangan perlu diperhatikan bahwa saat flexiforce
A201 berada dalam kondisi tanpa gaya, resistansi yang dikeluarkan adalah ±5MΩ,
dan saat keadaan gaya penuh maka resistansi yang dikeluarkan ±20kΩ. Dari
rumusan tersebut dapat diperoleh fungsi alih (gaya-resistansi).
Saat gaya 0 lbs R s 5MΩ dan Saat gaya 100 lbs R s 20kΩ
1
Misalkan fungsi alih lb a.
b
Rs
1
1
b ; 100 a.
b
5MΩ
20kΩ
Dengan melakukan Eliminasi terhadap dua persamaan diatas akan didapatkan
0 a.
nilai a -0.02.10-3 dan b 100,4.
Sehingga fungsi alih lb 2.10 6.
1
0,4.
Rs
4.2.2 Konversi Resistansi -Tegangan
Dari data grafik konduktansi sebagai fungsi gaya diatas dapat diamati
bahwa nilai konduktansi sebanding dengan nilai gaya yang diterima oleh
flexiforce A201 (F~1/R). Kesebandingan gaya dengan 1/R tersebut dapat
dimanfaatkan untuk mengkonversi nilai konduktansi ke tegangan.
Dengan memanfaatkan rangkaian penguat inverting dimana sensor
flexiforce A201 (F~1/R) ditempatkan sebagai resistor variabel yang seri dengan
input akan didapatkan bahwa Vout VT .
Rf
. Jika sebelumnya telah ditetapkan
Rs
bahwa nilai VT 5V dan nilai R f 10kΩ maka akan didapatkan fungsi
tegangan output terhadap resistansi flexiforce A201 sebesar Vout
50000
volt .
Rs
Akibatnya keluaran dari rangkaian penguat inverting ini akan berupa tegangan
output yang linear terhadap gaya yang diterima.
4.2.3 Menentukan Fungsi Alih Gaya-Tegangan
Persamaan I→ lb 2.106.
Persamaan II→ Vout
1
0,4
Rs
50000
volt .
Rs
dan
Dari kedua persamaan diatas dapat disusun suatu fungsi tegangan output ter hadap
gaya., dari persamaan tersebut rangkaian pengkondis i sinyal dapat direncanak an.
Vout
50000
50000
volt Vout
(lb 0,4)
Rs
2000000
Vout 0,025(lb 0,4)
4.2.4 Menentukan Fungsi Alih RPS
Range kerja flexiforce A201 berada pada nilai (0-100lbs). Berdasarkan
fungsi Vout 0,025(lb 0,4) dapat ditentukan parameter kerja alat.
Saat F = 0 lbs → Vout 0,025(lb 0,4) , maka Vout = 10mV
Saat F = 100 lbs → Vout 0,025(lb 0,4) , maka Vout = 2,51V
Rangkaian pengkondisi sinyal akan mengubah tegangan output 10mV2,51V menjadi tegangan dengan level 0-5V. Untuk keperluan tersebut dapat
dipergunakan rangkaian penguat instrumentasi.
Saat Vout = 10mV → diinginkan tegangan keluaran RPS sebesar 0V
Saat Vout = 2.51mV → diinginkan tegangan keluaran RPS sebesar 5V
Misal fungsi alih tegan gan VRPS A.Vin B maka :
0V A.10mV B
Persamaan1
5V A.2.51V B
Persamaan2
Dengan melakukan eliminasi dari kedua persamaan diatas maka akan
didapatkan koefisien A=2 dan B=-0,02.
Maka fungsi alih tegangan keluaran penguat inverting ke tegangan
keluaran “Rangkaian Pengkondisi Sinyal” akan senilai dengan VRPS 2.Vin - 0,02
atau dapat dituliskan VRPS 2(Vin - 0,01) .
4.3 Penguat Instrumentasi
Karakteristik fungsi alih diatas cocok
dengan rumusan dari penguat
instrumentasi, sehingga secara rangkaian fungsi alih diatas dapat digantikan
dengan penguat instrumentasi.
2 R R
Vout 1 1 3 V2 V1
RG R2
Dengan memberikan nilai R3 = R2 = 1kΩ, nilai R1=1 kΩ dan nilai RG=2
kΩ. V2 akan bertindak sebagai masukan dari penguat inverting sedangkan V1
akan bertindak sebagai referensi yang nilainya ditetapkan pada 10mV.
2.1kΩ 1kΩ
Vout 1
(V V1 )
2kΩ 1kΩ 2
Vout 2 (V2 10mV)
V1 10mV
Tegangan sebesar 10mV dihasilkan dari zener 3,3V yang dibagi tegangan
melalui resistor dengan nilai 10Ω dan 3,3kΩ. Keluaran tegangan dari penguat
instrumentasi akan masuk dalam rangkaian penguat instrumentasi. Output dari
rangkaian penguat instrumentasi menjadi masukan ATmega 16. ATmega 16 akan
meproses data sebagai data masukan untuk kombinasi logika softwere menjadi
hasil besarnya gaya yang akan ditampilkan dalam LCD.
4.4 ADC 0804
Perhitungan Vx
Vref = 5V
n=8
Gain
Resolusi
Perubahan tegangan tiap bit
Sensitivitas
Sensitivitas = Gaya(lb) / 1V
Untuk Vout= 1V
Vout = 0.025(lb+0.4)
1 = 0.025 (lb+0.4)
1 = 0.025lb+0.01
0.99=0.025lb
lb=39.6
Sensitivitas = 39.6lb/V
Perubahan gaya tiap bit
=
0.00984
39.6
= 0.000248 lb
BAB VI
PENUTUP
Sensor gaya tersusun dari sensor flixiforce A201, rangkaian pengali
pembalik, rangkaian pengondisi sinyal, rangkaian penguat instrumentasi, ADC
0804, mikrokontroller ATmega 16, dan ditampilkan melalui LCD. Sensor
flexiforce A201 merupakan sensor gaya yang menghasilkan resistansi yang
berubah ketika ada gaya.Resistansi yang berubah dijadikan Rf untuk rangkaian
pengali pembalik. Output tegangan pada rangkaian pengali pembalik akan di
kondisikan
dengan
rangkaian
pengkondisi
sinyal
dengan
rumusan
VRPS 2(Vin - 0,01)
Output tegangan pada rangkaian pengkondisi sinyal akan masuk dalam
rangkaian penguat instrumentasi, selanjutnya masuk dalam IC ADC0804 untuk
diubah menjadi data digital. Data digital sebagai input untuk mikrokontroller
ATmega 16. Data besar gaya yang dihasilkan akan ditampilkan dalam LCD 2x16.