BAB II TINJAUAN PUSTAKA Dalam bab ini akan dikemukakan teori
advertisement

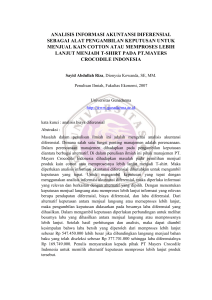
BAB II TINJAUAN PUSTAKA Dalam bab ini akan dikemukakan teori-teori yang mendukung pembahasan penyelesaian persamaan diferensial linier tak homogen dengan menggunakan metode fungsi green antara lain: persamaan diferensial, orde dan derajat suatu persamaan diferensial, persamaan diferensial linear, persamaan diferensial linear homogen dengan koefisien konstan, persamaan diferensial linier orde-n tak homogen dengan koefisien konstan,determinan wronski, selesaian khusus persamaan tak homogen dengan metode variasi parameter, dan sistem fisis persamaan osilasi harmonik teredam 2.1 Persamaan Diferensial Persamaan diferensial adalah persamaan yang memuat turunan dari satu (atau beberapa) fungsi yang tidak diketahui. Ada dua macam persamaan diferensial, yaitu: a. Persamaan diferensial biasa yaitu persamaan dimana fungsi yang belum diketahui hanya memuat satu variabel bebas saja. Contoh 1. 𝑑𝑑𝑑𝑑 2. 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑑𝑑 = 𝑥𝑥 + 6, (dimana hanya mengandung satu variabel bebas yaitu 𝑥𝑥) 𝑑𝑑𝑥𝑥 2 +3 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 + 2𝑦𝑦 = 0 3. 𝑥𝑥𝑥𝑥′ + 𝑦𝑦 = 3 4. 𝑦𝑦′′′ + 2(𝑦𝑦 ′ ′)2 + 𝑦𝑦′ = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 b. Persamaan diferensial parsial yaitu persamaan diferensial dimana fungsi yang belum diketahui memuat dua atau lebih variabel bebas. Contoh: 1. 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 = 𝑧𝑧 + 𝑥𝑥 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 Universitas Sumatera Utara 2. . 𝜕𝜕 2 𝑧𝑧 𝜕𝜕𝑥𝑥 2 + 𝜕𝜕 2 𝑧𝑧 𝜕𝜕𝑦𝑦 2 = 𝑥𝑥 2 𝑦𝑦 2.2 Orde dan Derajat Suatu Persamaan Diferensial Orde persamaan diferensial adalah tingkat tertinggi turunan yang timbul. Sedangkan derajat persamaan diferensial dapat ditulis sebagai polynomial dalam turunan, adalah derajat turunan tingkat tertinggi yang terjadi. Contoh: 1. 2. 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑥𝑥 2 = 𝑥𝑥 + 6 (merupakan persamaan diferensial biasa orde 1 derajat 1). +3 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 + 2𝑦𝑦 = 0 (merupakan persamaan diferensial biasa orde 2 derajat 1). 3. 𝑥𝑥𝑥𝑥′ + 𝑦𝑦 = 3 (merupakan persamaan diferensial biasa orde 1 derajat 1). ′ 2 4. 𝑦𝑦 ′′′ + 2�𝑦𝑦 ′ � + 𝑦𝑦 ′ = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 (merupakan persamaan diferensial biasa orde 3 derajat 1). 5. (𝑦𝑦′′)2 + (𝑦𝑦′)2 + 3𝑦𝑦 = 𝑥𝑥 2 (merupakan persamaan diferensial biasa orde 2 derajat 2). 6. 7. 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 𝜕𝜕𝑧𝑧 2 = 𝑧𝑧 + 𝑥𝑥 𝜕𝜕𝑥𝑥 2 + 𝜕𝜕𝑧𝑧 2 𝜕𝜕𝑦𝑦 2 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 (merupakan persamaan diferensial parsial orde 1 derajat 1). = 𝑥𝑥 2 + 𝑦𝑦 (merupakan persamaan diferensial parsial orde 2 derajat 1). 2.3 Persamaan Diferensial Linier Sebuah persamaan diferensial termasuk persamaan diferensial linier jika memenuhi dua hal berikut: 1. Variabel-variabel terikat dan turunannya tertinggi berpangkat 1 2. Tidak mengandung bentuk perkalian antara sebuah variabel terikat dengan variabel terikat lainnya, atau turunan yang satu dengan turunan yang lainnya, atau variabel terikat dengan sebuah turunan. Jadi istilah linier berkaitan dengan kenyataan bahwa tiap suku dalam persamaan diferensial itu, peubah-peubah y, y',…, y(n) berderajat 1 atau nol. Contoh: 1. 𝑥𝑥𝑥𝑥′ + 𝑦𝑦 = 3 ′ 2 2. 𝑦𝑦 ′′′ + 2�𝑦𝑦 ′ � + 𝑦𝑦 ′ = 𝑥𝑥 jadi bentuk umum persamaan diferensial linier orde- n adalah 𝑎𝑎0 (𝑥𝑥)𝑦𝑦 𝑛𝑛 + 𝑎𝑎1 (𝑥𝑥)𝑦𝑦 (𝑛𝑛−1) + ⋯ + 𝑎𝑎𝑛𝑛−1 (𝑥𝑥)𝑦𝑦 ′ + 𝑎𝑎𝑛𝑛 (𝑥𝑥)𝑦𝑦 = 𝑓𝑓(𝑥𝑥) (2.3) Universitas Sumatera Utara keterangan: Jika 𝑓𝑓(𝑥𝑥) = 0, maka persamaan (2.3.1) disebut persamaan diferensial linier homogeny orde−𝑛𝑛 Jika 𝑓𝑓(𝑥𝑥) ≠ 0, maka persamaan (2.3.1) disebut persamaan diferensial linier non homogen orde−𝑛𝑛. jika semua koefisien 𝑎𝑎0 (𝑥𝑥), 𝑎𝑎1 (𝑥𝑥), … , 𝑎𝑎𝑛𝑛 (𝑥𝑥) adalah tetap, maka persamaan (2.3.1) disebut persamaan diferensial linier dengan koefisien konstan. jika semua koefisien 𝑎𝑎0 (𝑥𝑥), 𝑎𝑎1 (𝑥𝑥), … , 𝑎𝑎𝑛𝑛 (𝑥𝑥) adalah berupa fungsi, maka persamaan (2.3.1) disebut persamaan diferensial linier dengan koefisien variabel (peubah). 2.4 Persamaan Diferensial Linear Homogen dengan Koefisien Konstan Bentuk umum persamaan diferensial linear homogen dengan koefisien konstan: 𝑎𝑎0 𝑦𝑦 𝑛𝑛 + 𝑎𝑎1 𝑦𝑦 (𝑛𝑛−1) + ⋯ + 𝑎𝑎𝑛𝑛−1 𝑦𝑦 ′ + 𝑎𝑎𝑛𝑛 𝑦𝑦 = 0 (2.4.1) dimana 𝑎𝑎0 , 𝑎𝑎1,…, 𝑎𝑎𝑛𝑛 adalah konstanta. Untuk menentukan selesaiannya yaitu dengan mensubstitusi y = etx , kemudian menentukan bilangan tetap t sehingga etx sehingga persamaan (2.4.1) karena y = etx , y’ = t etx , y”=t2 etx dan seterusnya hingga yn =tn etx. Bila disubstitusikan ke persamaan (2.4.1) akan didapatkan suatu persamaan dalam t, yaitu: karena etx≠0, maka 𝑒𝑒 𝑡𝑡𝑡𝑡 (𝑎𝑎0 𝑡𝑡 𝑛𝑛 + 𝑎𝑎1 𝑡𝑡 𝑛𝑛−1 + 𝑎𝑎2 𝑡𝑡 𝑛𝑛−2 + ⋯ + 𝑎𝑎𝑛𝑛 ) = 0 (2.4.2) (𝑎𝑎0 𝑡𝑡 𝑛𝑛 + 𝑎𝑎1 𝑡𝑡 𝑛𝑛−1 + 𝑎𝑎2 𝑡𝑡 𝑛𝑛−2 + ⋯ + 𝑎𝑎𝑛𝑛 ) = 0 (2.4.3) Persamaan (2.4.3) tersebut disebut persamaan karakteristik dari persamaan diferensial (2.4.1) dan akar-akarnya disebut akar-akar karakteristik. Ada tiga kemungkinan selesaian yang bebas linier dari persamaan (2.4.1), yaitu: 1. Bila akar-akarnya real dan berlainan, maka selesaian bebas liniernya yaitu: 𝑒𝑒 𝑡𝑡 1 𝑥𝑥 , 𝑒𝑒 𝑡𝑡 2 𝑥𝑥 , … , 𝑒𝑒 𝑡𝑡 𝑛𝑛 𝑥𝑥 2. Bila akar-akarnya real dan sama, maka selesaian bebas liniernya yaitu: 𝑒𝑒 𝑡𝑡𝑡𝑡 , 𝑥𝑥𝑒𝑒 𝑡𝑡𝑡𝑡 , … , 𝑥𝑥 𝑛𝑛−1 𝑒𝑒 𝑡𝑡𝑡𝑡 3. Bila akar-akarnya kompleks, 𝑒𝑒 𝑎𝑎𝑎𝑎 (cos 𝑏𝑏𝑏𝑏 + sin 𝑏𝑏𝑏𝑏) maka selesaian bebas liniernya yaitu:𝑒𝑒 (𝑎𝑎−𝑏𝑏𝑏𝑏 )𝑥𝑥 atau 2.5 Persamaan Diferensial Linier Orde-n Tak Homogen Dengan Koefisien Konstan Universitas Sumatera Utara Bentuk umum persamaan diferensial tak homogeny orde-n adalah sebagai berikut : 𝐴𝐴𝑛𝑛 𝑦𝑦 𝑛𝑛 + 𝐴𝐴𝑛𝑛−1 𝑦𝑦 𝑛𝑛−1 + 𝐴𝐴𝑛𝑛−2 𝑦𝑦 𝑛𝑛−2 + ⋯ + 𝐴𝐴1 𝑦𝑦 ′ + 𝐴𝐴0 𝑦𝑦 = 𝑟𝑟(𝑥𝑥) (2.5.1) Solusi umum 𝑦𝑦(𝑥𝑥) akan didapatkan bila solusi umum 𝑦𝑦ℎ 𝑥𝑥 dari Persamaan Diferensial Homogen diketahui, dimana bentuk umum persamaan diferensial homogenya orde-n adalah sebagai berikut : 𝐴𝐴𝑛𝑛 𝑦𝑦 𝑛𝑛 + 𝐴𝐴𝑛𝑛−1 𝑦𝑦 𝑛𝑛−1 + 𝐴𝐴𝑛𝑛−2 𝑦𝑦 𝑛𝑛−2 + ⋯ + 𝐴𝐴1 𝑦𝑦 ′ + 𝐴𝐴0 𝑦𝑦 = 0 (2.5.2) Kemudian 𝑦𝑦(𝑥𝑥) dibentuk dengan penambahan 𝑦𝑦ℎ 𝑥𝑥 sembarang solusi 𝑦𝑦 termasuk konstanta tak tetapnya. Sehingga, 𝑦𝑦(𝑥𝑥) = 𝑦𝑦ℎ (𝑥𝑥) + 𝑦𝑦𝑝𝑝 (𝑥𝑥) (2.5.3) Dalam hal ini kita membahas penyelesaian untuk mendapatkan persamaan partikulirnya dengan melalui metode fungsi green dan dengan melalui metode koefisien tak tentu. 2.6 Determinan Wronski Misalkan 𝑓𝑓1 , 𝑓𝑓2 , … , 𝑓𝑓𝑛𝑛 kumpulan n buah fungsi yang semuanya dan turunan- turunannya sampai dengan turunan yang ke n-1kontinyu pada selang a ≤ x ≤ b. Wronski dari 𝑓𝑓1 , 𝑓𝑓2 , … , 𝑓𝑓𝑛𝑛 dihitung pada x dinyatakan oleh 𝑊𝑊(𝑓𝑓1 , 𝑓𝑓2 , … , 𝑓𝑓𝑛𝑛 ; 𝑥𝑥) dan ditentukan sebagai determinan 𝑓𝑓1 ⎡ 𝑓𝑓 ′ ⎢ 1 𝑊𝑊(𝑓𝑓1 , 𝑓𝑓2 , … , 𝑓𝑓𝑛𝑛 ; 𝑥𝑥) = ⎢ 𝑓𝑓1 ′′ ⋮ ⎢ 𝑛𝑛−1 ⎣𝑓𝑓1 𝑓𝑓2 𝑓𝑓2 ′ 𝑓𝑓2 ′′ ⋮ 𝑓𝑓2 𝑛𝑛−1 𝑓𝑓𝑛𝑛 ⋯ ⎤ ⋯ 𝑓𝑓𝑛𝑛 ′ ⎥ ⋯ 𝑓𝑓𝑛𝑛 ′′ ⎥ ⋮ ⋮ ⎥ ⋯ 𝑓𝑓𝑛𝑛 𝑛𝑛−1 ⎦ (2.6.1) tiap fungsi yang muncul dalam determinan ini dihitung pada x. Contoh Diketahui𝑓𝑓1 (𝑥𝑥) = 𝑥𝑥 2 dan 𝑓𝑓2 (𝑥𝑥) = cos 𝑥𝑥 , cari 𝑊𝑊(𝑓𝑓1 , 𝑓𝑓2 ; 𝑥𝑥) Universitas Sumatera Utara Penyelesaian: Dari defenisi di atas dan dari fungsi-fungsi yang telah diketahui, maka dapat dihitung: 2 𝑊𝑊(𝑥𝑥 2 , cos 𝑥𝑥; 𝑥𝑥) = � 𝑥𝑥 2𝑥𝑥 cos 𝑥𝑥 � = −𝑥𝑥 2 sin 𝑥𝑥 − 2𝑥𝑥 cos 𝑥𝑥 − sin 𝑥𝑥 Misalkan bahwa 𝑦𝑦1 , 𝑦𝑦2 , … , 𝑦𝑦𝑛𝑛 merupakan n buah penyelesaian persamaan diferensial (2.4.1). Misalkan juga bahwa fungsi-fungsi tersebut bebas linier pada selang defenisi persamaan diferensial ini. Dikatakan bahwa fungsi-fungsi itu membentuk himpunan fundamental (atau sistem fundamental) penyelesaian persamaan diferensial tersebut. Sebagai contoh fungsi cos 𝑥𝑥 dan fungsi sin 𝑥𝑥 merupakan suatu himpunan fundamental penyelesaian persamaan diferensial 𝑦𝑦 ′′ + 𝑦𝑦 = 0 . Juga fungsi 𝑒𝑒 𝑥𝑥 dan 𝑒𝑒 −𝑥𝑥 membentuk suatu himpunan fundamental penyelesaian persamaan diferensial 𝑦𝑦 ′′ − 𝑦𝑦 = 0. 2.7 Selesaian Khusus Persamaan Takhomogen: Penyelesaian Dengan Metode Variasi Parameter Metode variasi parameter adalah metode yang dapat digunakan untuk menentukan selesaian khusus PD linier takhomogen dengan koefisien variabel, sehingga lebih umum daripada metode koefisien tak tentu. Perhatikan PD linier orde 2 yang mempunyai bentuk 𝑦𝑦 ′′ + 𝑝𝑝(𝑥𝑥)𝑦𝑦 ′ + 𝑞𝑞(𝑥𝑥)𝑦𝑦 = 𝑟𝑟(𝑥𝑥) (2.7.1) dengan p, q, dan r fungsi-fungsi kontinu pada suatu interval buka I. Kita akan menentukan selesaian khusus dari (2.7.1) dengan metode variasi parameter seperti berikut. Kita mengetahui bahwa PD homogen yang bersesuaian, yaitu 𝑦𝑦 ′′ + 𝑝𝑝(𝑥𝑥)𝑦𝑦 ′ + 𝑞𝑞(𝑥𝑥)𝑦𝑦 = 0 (2.7.2) 𝑦𝑦ℎ (𝑥𝑥) = 𝑐𝑐1 𝑦𝑦1 (𝑥𝑥) + 𝑐𝑐2 𝑦𝑦2 (𝑥𝑥) (2.7.3) mempunyai suatu selesaian umum 𝑦𝑦ℎ (𝑥𝑥) pada I yang berbentuk Metode variasi parameter terdiri dari penggantian 𝑐𝑐1 dan 𝑐𝑐2 dengan fungsi 𝑢𝑢(𝑥𝑥) dan 𝑣𝑣(𝑥𝑥) yang akan ditentukan sedemikian hingga fungsi penggantinya, yaitu 𝑦𝑦ℎ (𝑥𝑥) = 𝑢𝑢(𝑥𝑥)𝑦𝑦1 (𝑥𝑥) + 𝑣𝑣(𝑥𝑥)𝑦𝑦2 (𝑥𝑥) (2.7.4) Universitas Sumatera Utara merupakan selesaian khusus dari (2.7.1) pada I. dengan menurunkan (2.7.3) diperoleh 𝑦𝑦𝑝𝑝′ = 𝑢𝑢′ 𝑦𝑦1 + 𝑢𝑢𝑦𝑦1′ + 𝑣𝑣 ′ 𝑦𝑦2 + 𝑣𝑣𝑦𝑦2 ′ (2.7.5) Persamaan (2.7.3) memuat dua fungsi 𝑢𝑢 dan 𝑣𝑣, tetapi syarat bahwa 𝑦𝑦𝑝𝑝 memenuhi (2.7.1) mengakibatkan bahwa hanya ada satu syarat pada 𝑢𝑢 dan 𝑣𝑣. . Karena itu kita bisa menerapkan kondisi (syarat) sebarang yang ke dua. Perhitungan berikut akan menunjukkan bahwa kita dapat menentukan 𝑢𝑢 dan 𝑣𝑣 sedemikian hingga 𝑦𝑦𝑝𝑝 memenuhi (2.7.1) dan 𝑢𝑢 dan 𝑣𝑣 memenuhi, sebagai syarat ke dua, hubungan: 𝑢𝑢′ 𝑦𝑦1 + 𝑣𝑣 ′ 𝑦𝑦2 = 0 (2.7.6) Ini mereduksi ekspresi untuk 𝑦𝑦𝑝𝑝 ’ ke bentuk 𝑦𝑦𝑝𝑝 ’ = 𝑢𝑢𝑦𝑦1 ’ + 𝑣𝑣𝑦𝑦2 ’ . (2.7.7) Dengan menurunkan fungsi ini diperoleh 𝑦𝑦𝑝𝑝 ” = 𝑢𝑢’𝑦𝑦1 ’ + 𝑢𝑢𝑦𝑦1 ” + 𝑣𝑣’𝑦𝑦2 ’ + 𝑣𝑣𝑦𝑦2 ” (2.7.8) Dengan mensubstitusikan (2.7.3), (2.7.5) dan (2.7.6) ke dalam (2.7.1) dan mengumpulkan suku-suku yang memuat 𝑢𝑢 dan 𝑣𝑣 akan diperoleh 𝑢𝑢(𝑦𝑦1 ” + 𝑝𝑝𝑦𝑦1 ’ + 𝑞𝑞𝑦𝑦1 ) + 𝑣𝑣(𝑦𝑦2 ” + 𝑝𝑝𝑦𝑦2 ’ + 𝑞𝑞𝑦𝑦2 ) + 𝑢𝑢’𝑦𝑦1 ’ + 𝑣𝑣’𝑦𝑦2 ’ = 𝑟𝑟 (2.7.9) Karena 𝑦𝑦1 dan 𝑦𝑦2 selesaian dari PD homogen (2.7.6), maka persamaan di atas mereduksi ke bentuk (i) 𝑢𝑢’𝑦𝑦1 ’ + 𝑣𝑣’𝑦𝑦2 ’ = 𝑟𝑟 (ii) 𝑢𝑢’𝑦𝑦1 + 𝑣𝑣’𝑦𝑦2 = 0 Persamaan (i) dan (ii) merupakan sistem dua persamaan aljabar linier dari fungsi-fungsi 𝑢𝑢’ dan 𝑣𝑣’ yang tidak diketahui. Selesaian diperoleh dengan aturan Cramer: 𝑢𝑢′ = − Dengan 𝑣𝑣 ′ = 𝑦𝑦2 𝑟𝑟 𝑊𝑊 𝑦𝑦1 𝑟𝑟 𝑊𝑊 𝑊𝑊 = 𝑦𝑦1 𝑦𝑦2 ′ + 𝑦𝑦1 ′𝑦𝑦2 (2.7.10) (2.7.11) adalah Wronski dari dari 𝑦𝑦1 dan 𝑦𝑦2 . Jelas bahwa W≠0 karena 𝑦𝑦1 , 𝑦𝑦2 membangun basis selesaian. Pengintegralan (2.7.7) menghasilkan Universitas Sumatera Utara 𝑢𝑢 = − ∫ 𝑣𝑣 = ∫ 𝑦𝑦2 𝑟𝑟 𝑊𝑊 𝑦𝑦1 𝑟𝑟 𝑊𝑊 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 (2.7.12) Integral ini ada karena 𝑟𝑟(𝑥𝑥) kontinu. Substitusikan ekspresi untuk 𝑢𝑢 dan 𝑣𝑣 ini ke dalam (2.7.3), untuk memperoleh selesaian dari (2.7.1). 𝑦𝑦𝑝𝑝 (𝑥𝑥) = −𝑦𝑦1 ∫ 𝑦𝑦2 𝑟𝑟 𝑊𝑊 𝑑𝑑𝑑𝑑 + 𝑦𝑦2 ∫ 𝑦𝑦1 𝑟𝑟 𝑊𝑊 𝑑𝑑𝑑𝑑 (2.7.13) 2.8 Konsep Fungsi Green Dari suatu sistem persamaan diferensial linear tak homogen orde-n: 𝑎𝑎0 (𝑥𝑥)𝑦𝑦 (𝑛𝑛) + 𝑎𝑎1 (𝑥𝑥)𝑦𝑦 (𝑛𝑛−1) + ⋯ + 𝑎𝑎𝑛𝑛−1 (𝑥𝑥)𝑦𝑦 ′ + 𝑎𝑎𝑛𝑛 (𝑥𝑥)𝑦𝑦 = 𝑓𝑓(𝑥𝑥) (2.8) dengan fungsi 𝑓𝑓(𝑥𝑥) merupakan fungsi yang kontinyu. Fungsi 𝐺𝐺(𝑥𝑥, 𝑡𝑡) dikatakan sebagai fungsi green untuk masalah nilai awal persamaan diferensial di atas jika memenuhi kondisi berikut ini: a) 𝐺𝐺(𝑥𝑥, 𝑡𝑡) terdefenisi pada daerah R=I x I dari semua titik (𝑥𝑥, 𝑡𝑡) dimana 𝑥𝑥 dan 𝑡𝑡 terletak dalam selang I. b) 𝐺𝐺(𝑥𝑥, 𝑡𝑡), 𝜕𝜕𝜕𝜕 𝜕𝜕𝜕𝜕 , 𝜕𝜕 2 𝐺𝐺 𝜕𝜕𝑥𝑥 2 ,…, 𝜕𝜕 𝑛𝑛 𝐺𝐺 𝜕𝜕𝑥𝑥 𝑛𝑛 merupakan fungsi kontinu pada R=I x I 𝑥𝑥 c) Untuk setiap 𝑥𝑥0 dalam selang I , fungsi 𝑦𝑦𝑝𝑝 (𝑥𝑥) = ∫𝑥𝑥 𝐺𝐺(𝑥𝑥, 𝑡𝑡)𝑓𝑓(𝑡𝑡)𝑑𝑑𝑑𝑑 adalah solusi 0 persamaan diferensial di atas yang memenuhi kondisi awal 𝑦𝑦𝑝𝑝 (𝑥𝑥0 ) = 𝑦𝑦𝑝𝑝′ (𝑥𝑥0 ) = (𝑛𝑛−1) 𝑦𝑦𝑝𝑝′′ (𝑥𝑥0 ) = ⋯ = 𝑦𝑦𝑝𝑝 (𝑥𝑥0 ) = 0 2.9 Metode koefisien tak tentu Ide dasar dari metode koefisien tak tentu adalah menduga dengan cerdas solusi 𝑦𝑦𝑝𝑝 berdasarkan bentuk fungsi 𝑟𝑟(𝑥𝑥) di ruas kanan. Bentuk persamaan umum: 𝐴𝐴𝑛𝑛 𝑦𝑦 𝑛𝑛 + 𝐴𝐴𝑛𝑛−1 𝑦𝑦 𝑛𝑛−1 + 𝐴𝐴𝑛𝑛−2 𝑦𝑦 𝑛𝑛−2 + ⋯ + 𝐴𝐴1 𝑦𝑦 ′ + 𝐴𝐴0 𝑦𝑦 = 𝑟𝑟(𝑥𝑥) (2.9.1) Universitas Sumatera Utara Fungsi 𝑟𝑟(𝑥𝑥) yang merupakan bentuk solusi pertikular 𝑦𝑦𝑝𝑝 (𝑥𝑥) diperoleh dengan cara menebak, seperti misalnya: fungsi cos, fungsi sin, fungsi exponensial atau jumlah dari beberpa fungsi 𝑟𝑟(𝑥𝑥) berisikan koefisien tak tentu Turunkan 𝑦𝑦𝑝𝑝 sesuai persamaan umum di atas Subtitusikan 𝑦𝑦𝑝𝑝 dan seluruh turunannya ke dalam persamaan Bentuk 𝑟𝑟(𝑥𝑥) Pilihan untuk 𝑦𝑦𝑝𝑝 𝑘𝑘 𝑥𝑥 𝑛𝑛 (𝑛𝑛 = 0,1, … ) 𝑘𝑘𝑛𝑛 𝑥𝑥 𝑛𝑛 + 𝑘𝑘𝑛𝑛−1 𝑥𝑥 𝑛𝑛−1 + ⋯ + 𝑘𝑘1 𝑥𝑥 + 𝑘𝑘0 sin 𝑎𝑎𝑎𝑎 𝐴𝐴 sin 𝑎𝑎𝑎𝑎 + 𝐵𝐵 cos 𝑎𝑎𝑎𝑎 𝑒𝑒 𝑎𝑎𝑎𝑎 𝑥𝑥 𝑒𝑒 𝑎𝑎𝑎𝑎 cos 𝑎𝑎𝑎𝑎 𝐴𝐴𝑒𝑒 𝑎𝑎𝑎𝑎 𝐴𝐴𝑒𝑒 𝑎𝑎𝑎𝑎 + 𝐵𝐵𝐵𝐵 𝑒𝑒 𝑎𝑎𝑎𝑎 𝐴𝐴 sin 𝑎𝑎𝑎𝑎 + 𝐵𝐵 cos 𝑎𝑎𝑎𝑎 Tabel 2.1 Metode Koefisian Tak Tentu Misal 𝑓𝑓(𝑥𝑥) merupakan fungsi polinom, eksponen, sinus atau cosines. Maka solusi 𝑦𝑦𝑝𝑝 dimisalkan sebagai jumlah dari 𝑓𝑓(𝑥𝑥) dan semua turunannya. Selanjutnya 𝑦𝑦𝑝𝑝 𝑦𝑦𝑝𝑝 ′ dan 𝑦𝑦𝑝𝑝 ′′ disubstitusikan ke persamaan awal untuk menghitung nilai dari koefisiennya. 2.10 Sistem Fisis Persamaan Osilasi Harmonik Teredam Sampai saat ini masih banyak anggapan bahwa tidak ada gaya gesekan yang bekerja pada osilator. Jika anggapan ini dipegang, maka bandul atau beban pada pegas akan berosilasi terus menerus. Pada kenyataannya, amplitudo osilasi berkurang sedikit demi sedikit sampai akhirnya menjadi nol karena pengaruh gesekan. Dikatakan bahwa geraknya teredam oleh gesekan dan disebut osilasi teredam. Gesekan seringkali muncul dari gesekan udara atau gaya dalam. Besar gaya gesekan biasanya bergantung kepada laju. Dalam banyak hal, gaya Universitas Sumatera Utara gesekan sebanding dengan kecepatan, tetapi arahnya berlawanan. Contoh dari osilasi teredam misalnya adalah pada shock absorber mobil. Shock absorber merupakan komponen penting suatu kendaraan yaitu dalam sistem suspensi, yang berguna untuk meredam gaya osilasi dari pegas. Shock absorber berfungsi untuk memperlambat dan mengurangi besarnya getaran gerakan dengan mengubah energi kinetik dari gerakan suspensi menjadi energi panas yang dapat dihamburkan melalui cairan hidrolik. Peredam kejut (shockabsorber) pada mobil memiliki komponen pada bagian atasnya terhubung dengan piston dan dipasangkan dengan rangka kendaraan. Bagian bawahnya, terpasang dengan silinder bagian bawah yang dipasangkan dengan as roda. Fluida kental menyebabkan gaya redaman yang bergantung pada kecepatan relatif dari kedua ujung unit tersebut. Hal ini membantu untuk mengendalikan guncangan pada roda. Konstruksi shock absorber itu terdiri atas piston, piston rod dan tabung. Piston adalah komponen dalam tabung shock absorber yang bergerak naik turun di saat shock absorber bekerja. Sedangkan tabung adalah tempat dari minyak shock absorber dan sekaligus ruang untuk piston bergerak naik turun. Dan yang terakhir adalah piston rod adalah batang yang menghubungkan piston dengan tabung bagian atas (tabung luar) dari shock absorber. Untuk lebih jelasnya dapat dilihat pada gambar berikut: Piston Roo Oriface Piston Tabung Saluran Besar Keterangan: Katup Gambar 2.1 Detail struktur shock absorber Universitas Sumatera Utara Shock absorber bekerja dalam dua siklus yakni siklus kompresi dan siklus ekstensi. Siklus kompresi (penekanan) Saat shock absorber ditekan karena gaya osilasi dari pegas suspensi, maka gerakan yang terjadi adalah shock absorber mengalami pemendekan ukuran. Siklus kompresi terjadi ketika piston bergerak ke bawah, menekan fluida hidrolik di dalam ruang bawah piston. Dan minyak shock absorber yang berada dibawah piston akan naik keruang atas piston melalui lubang yang ada pada piston. Sementara lubang kecil (orifice) pada piston tertutup karena katup menutup saluran orifice tersebut. Penutupan katub ini disebabkan karena peletakan katup yang berupa membran (plat tipis) dipasangkan dibawah piston, sehingga ketika minyak shock absorber berusaha naik ke atas maka katup membran ini akan terdorong oleh shock absorber dan akilbatnya menutup saluran orifice. Jadi minyak shock absorber akan menuju ke atas melalui lubang yang besar pada piston, sementara minyak tidak bisa keluar melalui saluran oriface pada piston. Pada saat ini shock absorber tidak melakukan peredaman terhadap gaya osilasi dari pegas suspensi, karena minyak dapat naik ke ruang di atas piston dengan sangat mudah. Siklus ekstensi (memanjang) Pada saat memanjang piston di dalam tabung akan begerak dari bawah naik ke atas. Gerakan naik piston ini membuat minyak shock absorber yang sudah berada diatas menjadi tertekan. Minyak shock absorber ini akan mencari jalan keluar agar tidak tertekan oleh piston terus. Maka minyak ini akan mendorong katup pada saluran oriface untuk membuka dan minyak akan keluar atau turun ke bawah melalui saluran oriface. Pada saat ini katup pada lubang besar di piston akan tertutup karena letak katup ini yang berada di atas piston. Minyak shock absorber ini akan menekan katup lubang besar, piston ke bawah dan mengaakibat katup ini tertutup. Tapi letak katup saluran oriface membuka karena letaknya berada di bawah piston, sehingga ketika minyak shock menekan ke bawah katup ini membuka. Pada saat ini minyak shock absorber hanya dapat turun ke bawah melalui saluran orifice yang kecil. Karena salurannya yang kecil, maka minyak shock absorber tidak akan bisa cepat turun ke bawah alias terhambat. Di saat inilah shock absorber melakukan peredaman terhadap gaya osilasi pegas suspensi. Universitas Sumatera Utara Tipikal mobil atau truk ringan akan memiliki lebih banyak perlawanan selama siklus ekstensi daripada siklus kompresi. Semua peredam kejut modern adalah kecepatan-sensitif – suspensi semakin cepat bergerak, semakin banyak perlawanan yang shock breker sediakan. Hal ini memungkinkan guncangan untuk menyesuaikan diri dengan kondisi jalan dan untuk mengontrol semua gerakan yang tidak diinginkan yang dapat terjadi dalam kendaraan yang bergerak. Secara sederhana shock absorber merupakan pengaplikasian dari gerak osilasi harmonik yang teredam. Fo cos wt y m c k Gambar 2.2 Sistem fisis pada shock absorber Bila peredaman diperhitungkan, maka gaya peredam juga berlaku pada massa. Bila bergerak dalam fluida benda akan mendapatkan redaman karena kekentalan fluida. Gaya akibat kekentalan ini sebanding dengan kecepatan benda. Konstanta akibat kekentalan (viskositas) adalah c dengan satuan N s/m (SI) Persamaan osilasi teredam diberikan oleh hokum gerak kedua, 𝐹𝐹 = 𝑚𝑚𝑚𝑚 , dengan F merupakan jumlah dari gaya pemulih – 𝑘𝑘𝑘𝑘 dan gaya redaman – 𝑐𝑐 𝑑𝑑𝑑𝑑/𝑑𝑑𝑑𝑑 ; dalam hal ini c adalah konstanta positif. Kita peroleh bahwa 𝛴𝛴𝛴𝛴 = 𝑚𝑚𝑚𝑚 (2.10.1) atau −𝑘𝑘𝑘𝑘 − 𝑐𝑐 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑑𝑑 = 𝑚𝑚 𝑑𝑑𝑑𝑑 + 𝑘𝑘𝑘𝑘 = 0 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 2 (2.10.2) atau 𝑚𝑚 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑑𝑑 2 + 𝑐𝑐 𝑑𝑑𝑑𝑑 (2.10.3) Universitas Sumatera Utara Dalam osilasi teredam sebenarnya masih terdapat gaya lain yang bekerja berupa gaya paksaan. Dalam hal ini, dimisalkan gaya paksaan yang diberikan terhadap sistem yang telah disebutkan adalah 𝐹𝐹0 cos 𝜔𝜔𝜔𝜔. Di sini 𝐹𝐹0 adalah harga dari gaya eksternal dan 𝜔𝜔 adalah frekuensi sudutnya. Untuk jelasnya, dapat kita bayangkan bahwa gaya eksternal tersebut diberikan langsung pada massa yang digantungkan pada pegas. Maka kita peroleh persamaan: 𝛴𝛴𝛴𝛴 = 𝑚𝑚𝑚𝑚 diperoleh atau −𝑘𝑘𝑘𝑘 − 𝑐𝑐 𝑚𝑚 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑑𝑑 2 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 + 𝑐𝑐 + 𝐹𝐹0 cos 𝜔𝜔𝜔𝜔 = 𝑚𝑚 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 𝑑𝑑 2 𝑦𝑦 𝑑𝑑𝑑𝑑 2 + 𝑘𝑘𝑘𝑘 = 𝐹𝐹0 cos 𝜔𝜔𝜔𝜔 (2.10.4) (2.10.5) Universitas Sumatera Utara