8 BAB II PENDEKATAN PEMECAHAN MASALAH A. Perlintasan
advertisement

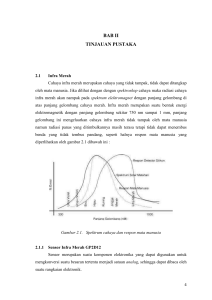
BAB II PENDEKATAN PEMECAHAN MASALAH A. Perlintasan kereta api Perlintasan kereta api adalah persilangan antara jalur kereta api dengan jalan, baik jalan raya ataupun jalan setapak kecil lainnya. Persilangan bisa terdapat di pedesaan ataupun perkotaan. Perlintasan terdiri dari perlintasan sebidang dan perlintasan tak sebidang. Perlintasan tak sebidang adalah persilangan antara jalur kereta api dengan jalan raya yang tidak pada satu bidang, misal dengan flyover atau underpass. Persyaratan pembuatan perlintasan tak sebidang : 1. Selang waktu antara kereta api satu dengan kereta api berikutnya yang melintas pada lokasi tersebut rata – rata sekurang – kurangnya 6 menit pada waktu sibuk. 2. Jarak perlintasan yang satu dengan yang lainnya pada satu jalur kereta api tidak kurang dari 800 meter. 3. Tidak terletak pada lengkungan atau tikungan jalan kereta atau tikungan jalan. 4. Terdapat kondisi lingkungan yang memungkinkan pandangan bagi masinis kereta api dari perlintasan dan bagi pengemudi kendaraan bermotor. 8 9 Perlintasan sebidang adalah persilangan antara jalur kereta dengan jalan raya pada satu bidang, yaitu di atas tanah. Persilangan ini banyak terdapat di pedesaan yang arus lalu lintas pada jalan tersebut masih relatif jarang. Persyaratan pembangunan perlintasan sebidang antara lain : 1. Permukaan jalan tidak boleh lebih tinggi atau lebih rendah dengan kepala rel, dengan toleransi 0,5 cm. 2. Terdapat permukaan dapat sepanjang 60 cm diukur dari sisi terluar jalan rel. 3. Maksimum gradien untuk dilewati kendaraan dihitung dari titik tertinggi di kepala rel adalah : a. Sebesar 2% diukur dari sisi terluar permukaan datar sebagaimana dimaksud dalam butir 2 untuk jarak 9,4 meter. b. Sebesar 10% untuk 10 meter berikutnya dihitung dari titik terluar sebagaimana dimaksud dalam butir 1 sebagai gradien peralihan. 4. Lebar perlintasan untuk satu jalur maksimum 7 meter. 5. Sudut perpotongan antara rel dengan jalan raya sekurang – kurangnya 90 derajat dan panjang jalan yang lurus minimal harus 150 meter dari jalan rel. 6. Harus dilengkapi rel lawan atau konstruksi lain untuk tetap menjamin adanya alur untuk roda kereta. 7. Ruas jalan yang dapat dibuat perlintasan sebidang antara jalan dengan jalan kereta mempunyai persyaratan sebagai berikut : 10 a. Jalan kelas III. b. Jalan sebanyak – banyaknya 2 lajur dan 2 arah. c. Tidak pada tikungan jalan dan atau alinement horizontal yang memiliki radius sekurang – kurangnya 500 meter. d. Tingkat kelandaian kurang dari 5% dari titik terluar jalan rel. e. Memenuhi jarak pandang bebas (ketentuan dapat dilihat pada tabel1). f. Sesuai dengan Rencana Umum Tata Ruang (RUTR). Tabel 1. Hubungan Jarak Pandang dengan Kecepatan (Dephub :2005) 11 Gambar 1. Hubungan jarak pandang dengan kecepatan pengendara kendaraan bermotor (Sumber : PT. CITRA LARAS:2009) Keterangan : dH = Jarak pandang terhadap jalan bagi kendaraan kecepatan VV untuk berhenti dengan aman tanpa melanggar batas perlintasan dT = Jarak pandang terhadap jalan rel untuk melakukan manuver seperti yang dideskripsikan untuk dH Besarnya dH dan dT seperti pada tabel 1. L = panjang kendaraan D = jarak dari garis stop atau dari bagian depan kendaraan terhadap rel terdekat de = Jarak dari pengemudi terhadap bagian depan kendaraan 12 Di dalam buku : A Policy on Geometric Design of Highways and Streets 2001 (AASHTO) dibahas tentang persilangan sebidang jalan raya dengan kereta api (Railroad – Highway Grade Crossing). Pada persilangan sebidang yang tidak menggunakan peralatan pengaman yang diaktifkan oleh kereta (train-activated warning devices) jarak pandangan merupakan pertimbangan utama. Dasar perhitungan adalah seperti juga ditunjukkan pada Gambar 1, dengan menggunakan rumus-rumus sebagai berikut: = = Di mana : + ( ) + + ............................................................................ (1) + + + ............................................... (2) (Sumber : PT. CITRA LARAS:2009) A = constant = 0.278 B = constant = 0.039 dH = panjang jarak pandangan sepanjang jalan raya yang memungkinkan kendaraan dengan kecepatan VV melintasi perlintasan dT = panjang jarak pandangan sepanjang jalan rel untuk melakukan maneuver seperti dideskripsikan untuk dH VV = kecepatan kendaraan (km/jam) VT = kecepatan kereta (km/jam) t = perception/reaction time, yang diasumsikan sebesar 2.5 detik a = driver deceleration, yang diasumsikan sebesar 3.4 m/s2 D = jarak dari stop line ke rel terdekat, yang diasumsikan sebesar 4.5 m. de = jarak dari pengemudi ke bagian terdepan kendaraan, diasumsikan sebesar 3.0 m 13 L = panjang kendaraan, diasumsikan sebesar 20 m W = jarak antara rel terluar (untuk single track, nilainya sebesar 1.5 m) Berdasarkan rumus tersebut dapat dihitung jarak pandangan terhadap jalan rel (dT) dan jarak pandangan terhadap jalan raya (dH), ditunjukkan pada Tabel 2. Tabel 2. Hubungan jarak pandang terhadap jalan raya (dephub:2005) 14 Berdasarkan SK Dirjen No. 770 Tahun 2005 dijelaskan bahwa perlintasan sebidang antara jalan dengan jalur kereta api terdiri dari perlintasan sebidang yang dilengkapi dengan Pintu (baik otomatis maupun tidak) serta perlintasan sebidang yang tidak dilengkapi dengan Pintu. Tabel 3. Kelengkapan pintu perlintasan kereta api (dephub:2005) KELENGKAPAN Perlintasan Sebidang Dengan Pintu Otomatis Ketentuan 1) Pintu dengan persyaratan kuat dan ringan, anti karat serta mudah dilihat dan memenuhi kriteria failsafe; 2) pada jalan dipasang pemisah lajur; 3) pada kondisi darurat petugas yang berwenang mengambil alih fungsi pintu. Perlintasan Dengan Otomatis Sebidang Pintu Tidak 1) Genta/isyarat suara dengan kekuatan 115 db pada jarak 1 meter. 2) daftar semboyan; 3) petugas yang berwenang; 4) daftar dinasan petugas; 5) gardu penjaga dan fasilitasnya; 6) daftar perjalanan kereta api sesuai Grafik Perjalanan Kereta Api (GAPEKA); 7) semboyan bendera berwarna merah dan hijau serta lampu semboyan; 8) perlengkapan lainnya seperti senter, kotak P3K, jam 15 dinding; 9) Pintu dengan persyaratan kuat dan ringan, anti karat serta mudah dilihat dan memenuhi kriteria failsafe untuk Pintu elektrik. Perlintasan Sebidang Perlintasan sebidang yang tidak dilengkapi pintu wajib Tanpa Pintu Perlintasan dilengkapi dengan rambu, marka, isyarat suara dan lampu lalu lintas satu warna yang berwarna merah berkedip atau dua lampu satu warna yang berwarna merah menyala bergantian sesuai pedoman ini. Isyarat lampu lalu lintas satu warna memiliki persyaratan sebagai berikut : 1) Terdiri dari satu lampu yang menyala berkedip atau dua lampu yang menyala bergantian. 2) Lampu berwarna kuning dipasang pada jalur lalu lintas, mengisyaratkan pengemudi harus berhatihati. 3) Lampu berwarna merah dipasang pada perlintasan sebidang dengan jalan kereta api dan apabila menyala mengisyaratkan pengemudi harus berhenti. 4) Dapat dilengkapi dengan isyarat suara atau tanda panah pada lampu yang menunjukan arah datangnya kereta api. 5) Berbentuk bulat dengan garis tengah antara 20 16 sentimeter sampai dengan 30 sentimeter. 6) Daya lampu antara 60 watt sampai dengan 100 watt. Pintu otomatis terdiri dari mekanisme kendali dan lengan pintu yang dicat berpendar strip merah putih yang dapat dikendalikan bolak balik secara otomatis dan dilengkapi oleh lampu. Pada posisi bawah lengan pintu harus terletak membentang menghalangi jalur lalu lintas yang bergerak mendekati. Lengan pintu harus dicat berpendar pada kedua sisi, mempunyai strip-strip bergantian merah putih dengan sudut 45 derajat. Jarak satu warna dengan yang lain adalah 400 mm dihitung secara horizontal. Lengan pintu harus mempunyai minimal 3 buah lampu. Standar desain pintu perlintasan adalah seperti ditunjukkan pada gambar berikut ini. Gambar 2. Desain pintu perlintasan kereta api (sumber:dephub:2005) 17 B. Mikrokontroller ATmega16 AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Komputer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 Register generalpurpose, timer/counter fleksibel dengan Mode compare, interrupt internal dan eksternal, serial UART, programmable Watchdog Timer, dan Mode Power saving, ADC dan PWM internal. AVR juga mempunyai In-Sistem Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI. ATmega16. ATmega16 mempunyai Throughput mendekati 1 MIPS per MHz membuat desainer sistem untuk mengoptimasi konsumsi daya dengan kecepatan proses. Gambar 3. Pin-Pin ATmega16 kemasan 40-Pin (Sumber:alldatasheet.com:2012) 18 Pin-Pin pada ATmega16 dengan kemasan 40-Pin DIP (dual inline package) ditunjukkan oleh gambar 3. Guna memaksimalkan performa, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah untuk program dan data). 1. Port sebagai input/output digital ATmega16 mempunyai empat buah Port yang bernama PortA, PortB, PortC, dan PortD. Keempat Port tersebut merupakan jalur bidirectional dengan pilihan internal pull-up. Tiap Port mempunyai tiga buah Register bit, yaitu DDxn, PORTxn, dan PINxn. Huruf ‘x’mewakili nama huruf dari Port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam Register DDRx (Data Direction Register) menentukan arah Pin. Bila DDxn diset 1 maka Px berfungsi sebagai Pin output. Bila DDxn diset 0 maka Px berfungsi sebagai Pin input. Bila PORTxn diset 1 pada saat Pin terkonfigurasi sebagai Pin input, maka resistor pull-up akan diaktifkan. Untuk mematikan resistor pull-up, PORTxn harus diset 0 atau Pin dikonfigurasi sebagai Pin output. Pin Port adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat Pin terkonfigurasi sebagai Pin output maka Pin Port akan berlogika 1. Dan bila PORTxn diset 0 pada saat Pin terkonfigurasi sebagai Pin output maka Pin Port akan berlogika 0. Saat 19 mengubah kondisi Port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output High (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enable (DDxn=0, PORTxn=1) atau kondisi output Low (DDxn=1, PORTxn=0). Biasanya, kondisi pull-up enable dapat diterima sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong High driver dengan sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada Register SFIOR dapat diset 1 untuk mematikan semua pull-up dalam semua Port. Peralihan dari kondisi input dengan pull-up ke kondisi output Low juga menimbulkan masalah yang sama. Kita harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output High (DDxn=1, PORTxn=0) sebagai kondisi transisi. Tabel 4. Konfigurasi Pin Port (Sumber:alldatasheet.com:2012) DDxn PORTxn 0 0 0 PUD I/O Pull-up X Input No 1 0 Input Yes 0 1 1 Input No Tri-state (HI-Z) 1 0 X Output No Output Low (Sink) 1 1 X Output No Output High (Source (In SFIOR) Comment Tri-state (HI-Z) Pxn will source current if ext. pulled low 20 2. Bit 2 – PUD : Pull-up Disable Bila bit diatur bernilai 1 maka pull-up pada Port I/O akan dimatikan walaupun Register DDxn dan PORTxn dikonfigurasikan untuk menyalakan pull-up (DDxn=0, PORTxn=1). 3. Timer Timer/counter adalah fasilitas dari ATmega16 yang digunakan untuk perhitungan pewaktuan. Beberapa fasilitas chanel dari timer counter antara lain: counter channel tunggal, pengosongan data timer sesuai dengan data pembanding, bebas -glitch, tahap yang tepat Pulse Width Modulation (PWM), pembangkit frekuensi, event counter external.. 4. Gambaran Umum Gambar diagram block timer/counter 8 bit yang ditunjukan pada gambar 2. Untuk penempatan Pin I/O telah di jelaskan pada bagian I/O. CPU dapat diakses Register I/O, termasuk dalam PinPin I/O dan bit I/O. Device khusus Register I/O dan lokasi bit terdaftar pada deskripsi timer/counter 8 bit. 21 Gambar 4. Blok diagram timer/counter (sumber : www.ilmukomputer.com : Mokh. Sholihul Hadi) 5. Timing Diagram Timer/counter Timer/counter didesain sinkron clock timer (clkT0) oleh karena itu ditunjukkan sebagai sinyal enable clock pada gambar 3. Gambar ini termasuk informasi ketika flag interrupt dalam kondisi set. Data timing digunakan sebagai dasar dari operasi timer/counter. Gambar 5. Timing diagram timer/counter, tanpa prescalling (sumber : www.ilmukomputer.com : Mokh. Sholihul Hadi) Sesuai dengan gambar 4 timing diagram timer/counter dengan prescalling maksudnya adalah counter akan menambahkan data counter (TCNTn) ketika terjadi pulsa clock telah mencapai 8 kali pulsa dan sinyal 22 clock pembagi aktif clock dan ketika telah mencapai nilai maksimal maka nilai TCNTn akan kembali ke nol. Dan kondisi flag timer akan aktif ketika TCNTn maksimal. Gambar 6. Timing diagram timer/counter, dengan prescalling (sumber : www.ilmukomputer.com : Mokh. Sholihul Hadi) Sama halnya timing timer pada gambar 4, timing timer/counter dengan setting OCFO timer Mode ini memasukan data ORCn sebagai data input timer. Ketika nilai ORCn sama dengan nilaiTCNTn maka pulsa flag timer akan aktif. TCNTn akan bertambah nilainya ketika pulsa clock telah mencapai 8 pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembali kenilai 0 (overfLow). Gambar 7. Timing diagram timer/counter, menyeting OCFO, dengan pescaler (fclk_I/O/8) (sumber : www.ilmukomputer.com : Mokh. Sholihul Hadi) Ketika nilai ORCn sama dengan nilai TCNTn maka pulsa flag timer akan aktif. TCNTn akan bertambah nilainya ketika pulsa clock telah 23 mencapai 8 pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembali kenilai 0 (overfLow). Gambar 8. Timing diagram timer/counter, menyeting OCFO, pengosongan data (sumber : www.ilmukomputer.com : Mokh. Sholihul Hadi) 6. Bit 6,3 – WGM01:0: Waveform Generation Mode Bit ini mengontrol penghitungan yang teratur pada counter, sumber untuk harga counter maksimal ( TOP )., dan tipe apa dari pembangkit bentuk gelombang yang digunakan. Mode operasi didukung oleh unit timer/counter sebagai berikut : Mode normal, pembersih timer pada Mode penyesuaian dengan pembanding ( CTC ), dan dua tipe Mode Pulse Width Modulation ( PWM ). Tabel 5. Deskripsi Bit Mode Pembangkit Bentuk Gelombang (: www.ilmukomputer.com : Mokh. Sholihul Hadi) WGM01 WGM00 Timer/counter Mode (CTC0) (PWM0) of Operation 0 0 0 Normal 0xFF Immediate MAX 1 0 1 PWM, Phase Correct 0xFF TOP BOTTOM 2 1 0 CTC OCR0 Immediate MAX 3 1 1 Fast PWM 0xFF TOP MAX Mode TOP Update of TOV0 Flag OCR0 Set-on 24 7. Bit 5:4 – COM 01:0 Penyesuaian Pembanding Mode Output Bit ini mengontrol Pin output compare (OCO), jika satu atau kedua bit COM01:0 diset, output OC0 melebihi fungsional Port normal I/O dan keduanya terhubung juga. Bagaimanapun, catatan bahwa bit Direksi Data Register (DDR) mencocokan ke Pin OC0 yang mana harus diset dengan tujuan mengaktifkan. Ketika OC0 dihubungkan ke Pin, fungsi dari bit COM01:0 tergantung dari pengesetan bit WGM01:0. Tabel 4 menunjukkan COM fungsional ketika bit-bt WGM01:0 diset ke normal atau Mode CTC (non PWM). Tabel 6. Mode Output Pembanding, tanpa PWM (: www.ilmukomputer.com : Mokh. Sholihul Hadi) COM01 0 0 1 1 COM00 0 1 0 1 Description Normal port operation, OC0 disconnected Toggle OC0 on compare match Clear OC0 on compare match Set OC0 on compare match Tabel 7 menunjukan bit COM01:0 fungsional ketika bit WGM01:0 diset ke Mode fast PWM. Tabel 7. Mode Output Pembanding, Mode fast PWM ( www.ilmukomputer.com : Mokh. Sholihul Hadi) COM01 0 0 1 1 COM00 0 1 0 1 Description Normal port operation, OC0 disconnected Reserved Clear OC0 on compare match, set OC0 at Top Set OC0 on compare match, clear OC0 at TOP 25 Tabel 8 menunjukan bit COM01:0 fungsional ketika bit WGM01:0 diset ke Mode phase correct PWM. Tabel 8. Mode Output Pembanding, Mode phase correct PWM (www.ilmukomputer.com : Mokh. Sholihul Hadi) COM01 COM00 Description 0 0 Normal port operation, OC0 disconnected 0 1 Reserved 1 0 1 1 Clear OC0 on compare match when up-counting. Set OC0 on compare match when downcounting Set OC0 on compare match when up-counting. Clear OC0 on compare match when downcounting 8. Bit 2:0 – CS02:0 : Clock Select Tiga bit clock select sumber clock digunakan dengan timer/counter. Jika Mode Pin eksternal digunakan untuk timer counter0, perPindahan dari Pin T0 akan memberi clock counter. Tabel 9. Deskripsi bit clock select (www.ilmukomputer.com : Mokh. Sholihul Hadi) CS02 CS01 CS00 Description 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 No clock sorce (Timer/Counter stopped) ClkI/O (No prescalling) ClkI/O/8 (From prescaler) ClkI/O/32 (From prescaler) ClkI/O/256 (From prescaler) ClkI/O/1024 (From prescaler) External clock source on T0 pin. Clock on falling edge External clock source on T0 pin. Clock on rising edge Sesuai dengan tabel 9 maka sumber clock dapat dibagi sehingga timer/counter dapat disesuaikan dengan banyak data yang dihitung. 26 9. Register Timer/counter TCNT0 Gambar 9. Register timer TCNT0 Register timer/counter memberikan akses secara langsung, keduanya digunakan untuk membaca dan menulis operasi, untuk penghitung unit 8-bit timer/counter. Menulis ke blok-blok Register TCNT0 (removes) disesuaikan dengan clock timer berikutnya. Memodifikasi counter (TCNT0) ketika perhitungan berjalan, memperkenalkan resiko kehilangan perbandingan antara TCNC0 dengan Register OCR0. 10. Register Timer/counter OCR0 Gambar 10. Register timer OCR0 Register output pembanding berisi sebuah harga 8 bit secara terus-menerus dibandingkan dengan harga counter (TCNT0). Sebuah penyesuaian dapat digunakan untuk membangkitkan output interrupt pembanding, atau untuk membangkitkan sebuah output bentuk gelombang pada Pin OC0. 27 C. Sensor optocoupler Rangkaian sensor optocoupler menggunakan photodioda dan led infra merah. Photodioda akan aktif apabila terkena cahaya dari led infra merah. Antara Led dan photodioda dipisahkan oleh jarak. Jauh dekatnya jarak mempengaruhi besar intensitas cahaya yang diterima oleh photodioda. Apabila antara Led dan photodioda tidak terhalang oleh benda, maka photodioda akan aktif. 1. Led Inframerah Led Infra merah adalah sebuah benda padat penghasil cahaya, yang mendekati/menghasilkan spectrum cahaya infra merah. Led (dioda cahaya) Infra merah menghasilkan panjang gelombang yang sama dengan yang biasa diterima oleh photodetektor silikon. Oleh karena itu Led infra merah bisa dipasangkan dengan foto transistor dan foto dioda. Gambar 11. Led Inframerah (ilmukumputer.com) 28 Karakteristik Inframerah Tidak dapat dilihat oleh manusia Tidak dapat menembus materi yang tidak tembus pandang Dapat ditimbulkan oleh komponen yang menghasilkan panas Panjang gelombang pada inframerah memiliki hubungan yang berlawanan atau berbanding terbalik dengan suhu. Ketika suhu mengalami kenaikan, maka panjang gelombang mengalami penurunan. 2. Photodioda Photodioda adalah dioda yang bekerja berdasarkan intensitas cahaya, jika photodioda terkena cahaya maka photodioda bekerja seperti dioda pada umumnya, tetapi jika tidak mendapat cahaya maka photodioda akan berperan seperti resistor dengan nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Gambar 12. Photodioda dan simbol Photodioda (ilmukomputer.com) Simbol dan bentuk photodioda hampir sama dengan Led, tetapi pada simbol photodioda arah dua panahnya menghadap ke dalam. 29 Photodioda banyak digunakan sebagai sensor cahaya dalam dunia elektronika, karena sifatnya yang peka terhadap cahaya. Komponen ini akan mengubah energi cahaya, dalam hal ini energi cahayainfra red memjadi sinyal listrik (dalam hal ini arus listrik). Merupakansambungan dioda PN yang memiliki kepekaan terhadap radiasi gelombang Elektromagnetik (EM) ketika jatuh pada sambungan. Dikarenakansambungan PN sangatlah kecil, dibutuhkan lensa untuk memfokuskan radiasi yang datang agar mendapatkan respon yang baik. Keunggulan deviceini adalah nilai waktu responnya sangatlah cepat.Kebanyakan memiliki waktu respon mendekati 1 mikrodetik, bahkan ada yang mendekati 1 nanodetik. Semakin tinggi intensitas cahaya, maka arus bocor pada sambungan PN semakin besar sehingga arus yang lewat sambungan semakin kecil. Pada keadaan gelap tanpa cahaya sama sekali, LDR memiliki nilai resistansi yang besar (sekitar beberapa mega ohm). Nilai resistansinya ini akan semakin kecil jika cahaya yang jatuh ke permukaannya semakin terang. Pada keadaan terang benderang (siang hari) nilai resistansinya dapat mengecil hingga beberapa ohm saja (hampir seperti konduktor). Ketika sebuah photon (satu satuan energi dalam cahaya) dari sumber cahaya diserap, hal tersebut membangkitkan suatu elektron dan menghasilkan sepasang pembawa muatan tunggal, sebuah elektron dan sebuah Hole, suatu Hole adalah bagian dari kisi-kisi 30 semikonduktor yang kehilangan elektron. Arah arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. Cara tersebut di dalam sebuah photodiode digunakan untuk mengumpulkan photon - menyebabkan pembawa muatan (seperti arus atau tegangan) mengalir/terbentuk di bagian-bagian elektroda. D. Motor DC Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan,dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor menggunakan sekitar 70% beban listrik total di industri. Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagianyang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yangmempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor 31 paling sederhana memiliki kumparan satu lilitan yang bias berputar bebas di antara kutub-kutub magnet permanen. Putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan. Pada motor dc, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar 13 : Gambar 13. Prinsip kerja motor dc (belajar-elektronika.com) E. Limit Switch Limit switch adalah salah satu sensor yang akan bekerja jika pada bagian aktuator nya tertekan suatu benda, baik dari samping kiri ataupun kanan, mempunyai micro switch dibagian dalamnya yang berfungsi untuk mengontakkan atau sebagai pengontak, gambar batang yang mempunyai roda 32 itu namanya actuator lalu diikat dengan sebuah baud, berfungsi untuk menerima tekanan dari luar, roda berfungsi agar pada saat Limit switch menerima tekanan , bisa bergerak bebas, kemudian mempunyai tiga lubang pada body nya berfungsi untuk tempat dudukan baud pada saat pemasangan di mesin. Gambar 14. Limit Switch (belajar-elektronika.com) Ketika actuator dari Limit switch tertekan suatu benda baik dari samPing kiri ataupun kanan sebanyak 45 derajat atau 90 derajat ( tergantung dari jenis dan type Limit switch ) maka, actuator akan bergerak dan diteruskan ke bagian dalam dari Limit switch, sehingga mengenai micro switch dan menghubungkan kontak-kontaknya, pada micro switch terdapat kontak jenis NO dan NC seperti juga sensor lainnya, kemudian kontaknya mempunyai beban kerja sekitar 5 A, untuk dihubungkan ke perangkat listrik lainnya, dan begitulah seterusnya, selain itu Limit switch juga mempunyai head atau kepala tempat dudukan actuator pada bagian atas dari Limit switch dan posisinya bisa dirubah-rubah sesuai dengan kebutuhan. F. Transistor Transistor adalah alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, 33 modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran listrik, berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya. Gambar 15. Transistor Through-Hole (dibandingkan dengan pita ukur sentimeter) (belajar-elektronika.com) Pada umumnya, transistor memiliki 3 terminal, yaitu Basis (B), Emitor (E) dan Kolektor (C). Tegangan yang di satu terminalnya misalnya Emitor dapat dipakai untuk mengatur arus dan tegangan yang lebih besar daripada arus input Basis, yaitu pada keluaran tegangan dan arus output Kolektor. Transistor merupakan komponen yang sangat penting dalam dunia elektronik Modern. Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat). Rangkaian analog melingkupi pengeras suara, sumber listrik stabil (stabilisator) dan penguat sinyal radio. Dalam rangkaianrangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi. Beberapa transistor juga dapat dirangkai sedemikian rupa sehingga berfungsi sebagai logic gate, memori dan fungsi rangkaian-rangkaian lainnya. Dari banyak tipe-tipe transistor Modern, pada awalnya ada dua tipe dasar transistor, Bipolar Junction Transistor (BJT atau transistor bipolar) dan field- 34 effect transistor (FET), yang masing-masing bekerja secara berbeda. Transistor bipolar dinamakan demikian karena kanal konduksi utamanya menggunakan dua polaritas pembawa muatan: elektron dan lubang, untuk membawa arus listrik. Dalam BJT, arus listrik utama harus melewati satu daerah/lapisan pembatas dinamakan depletion zone, dan ketebalan lapisan ini dapat diatur dengan kecepatan tinggi dengan tujuan untuk mengatur aliran arus utama tersebut. FET (juga dinamakan transistor unipolar) hanya menggunakan satu jenis pembawa muatan (elektron atau Hole, tergantung dari tipe FET). Dalam FET, arus listrik utama mengalir dalam satu kanal konduksi sempit dengan depletion zone di kedua sisinya (dibandingkan dengan transistor bipolar dimana daerah Basis memotong arah arus listrik utama). Dan ketebalan dari daerah perbatasan ini dapat diubah dengan perubahan tegangan yang diberikan, untuk mengubah ketebalan kanal konduksi tersebut. Lihat artikel untuk masing-masing tipe untuk penjelasan yang lebih lanjut. 35 1. Jenis Transistor PNP P-channel NPN N-channel Gambar 16. Simbol Transistor (sumber: ) Secara umum, transistor dapat dibeda-bedakan dibeda bedakan berdasarkan banyak kategori: a) Materi semikonduktor: Germanium, Silikon, Gallium Arsenide b) Kemasan fisik: Through Hole Metal, Through Hole Plastic Plastic, Surface Mount,, IC, dan lain-lain lain c) Tipe: UJT, BJT, BJT JFET, IGFET (MOSFET), IGBT, HBT HBT, MISFET, VMOSFET, MESFET, MESFET HEMT, SCR serta pengembangan engembangan dari transistor yaitu IC (Integrated Integrated Circuit) Circuit dan lain-lain. d) Polaritas: NPN atau N-channel, N PNP atau P-channel e) Maximum kapasitas daya: Low Power, Medium Power, High Power f) Maximum frekwensi kerja: Low, Medium, atau High Frequency, RF transistor, Microwave, Microwave dan lain-lain. Aplikasi: Amplifier, Amplifier Saklar, General Purpose, Audio,, Tegangan Tinggi, dan lain-lain 2. BJT BJT (Bipolar Bipolar Junction Transistor) Transistor) adalah salah satu dari dua jenis transistor. Cara kerja BJT dapat dibayangkan sebagai dua dioda yang 36 terminal positif atau negatifnya berdempet, sehingga ada tiga terminal. Ketiga terminal tersebut adalah emiter (E), kolektor (C), dan basis (B). Perubahan arus listrik dalam jumlah kecil pada terminal basis dapat menghasilkan perubahan arus listrik dalam jumlah besar pada terminal kolektor. Prinsip inilah yang mendasari penggunaan transistor sebagai penguat elektronik. Rasio antara arus pada koletor dengan arus pada basis biasanya dilambangkan dengan β atau hFE. β biasanya berkisar sekitar 100 untuk transistor-transisor BJT. 3. FET FET dibagi menjadi dua keluarga: Junction FET (JFET) dan Insulated Gate FET (IGFET) atau juga dikenal sebagai Metal Oxide Silicon (atau Semiconductor) FET (MOSFET). Berbeda dengan IGFET, terminal gate dalam JFET membentuk sebuah dioda dengan kanal (materi semikonduktor antara Source dan Drain). Secara fungsinya, ini membuat N-channel JFET menjadi sebuah versi solid-state dari tabung vakum, yang juga membentuk sebuah dioda antara grid dan katode. Dan juga, keduanya (JFET dan tabung vakum) bekerja di "depletion Mode", keduanya memiliki impedansi input tinggi, dan keduanya menghantarkan arus listrik dibawah kontrol tegangan input. FET lebih jauh lagi dibagi menjadi tipe enhancement Mode dan depletion Mode. Mode menandakan polaritas dari tegangan gate dibandingkan dengan Source saat FET menghantarkan listrik. Jika kita ambil N-channel FET sebagai contoh: dalam depletion Mode, gate 37 adalah negatif dibandingkan dengan Source, sedangkan dalam enhancement Mode, gate adalah positif. Untuk kedua Mode, jika tegangan gate dibuat lebih positif, aliran arus di antara Source dan Drain akan meningkat. Untuk P-channel FET, polaritas-polaritas semua dibalik. Sebagian besar IGFET adalah tipe enhancement Mode, dan hampir semua JFET adalah tipe depletion Mode. G. IC L293D L293D merupakan IC 16 Pin dengan fungsi salah satunya sebagai pengendali arah putaran motor DC. Gambar 15 menunjukkan Pin IC L293D. Gambar 17. Pin ICL293D (alldatasheet.com) Berikut fungsi pada Pin 1 – 16 IC L293D : Pin1 : enable 1 dan 2 Pin9 : enable 3 dan 4 Pin2 : input logika Pin10 : input logika Pin3 : out motor dari data Pin2 Pin11 : out motor dari data Pin10 Pin4 : ground Pin12 : ground Pin5 : ground Pin13 : ground 38 Pin6 : out motor dari data Pin7 Pin14 : out motor dari data Pin15 Pin7 : input logika Pin15 : input logika Pin8 : supply tegangan untuk motor Pin16 : supply tegangan 5V untuk IC Berikut ini merupakan gambar contoh aplikasi motor dc dengan IC L293D untuk menunjukkan fungsi Pin IC L293D. Gambar 18. Aplikasi IC L293D Dari gambar 18 Pin EN1 merupakan Pin yang difungsikan meng meng-enablekan motor DC (ON/OFF). ( Sedangkan Pin IN1 dan IN2 digunakan sebagai input logika untuk mengatur putaran motor DC dan dapat juga digunakan untuk memberhentikan motor DC secara cepat (fast ( motor stop stop). Berikut tabel 8 tentang fungsi Pin IN1 dan IN2. 39 Tabel 10. Fungsi Pin IN1 dan IN2 IN1 IN2 Kondisi Motor 0 0 Fast motor stop 0 1 Putaran searah jarum jam 1 0 Putaran berlawanan arah jarum jam 1 1 Fast motor stop Jika di inginkan motor berputar searah jarum jam, maka Pin IN1 diberi logika Low dan IN2 diberi logika High dari Pin mikrokontroller. Dan EN1 juga dihubungkan dengan output dari mikrokontroller. Pin VS kaki 8 pada IC L293D merupakan supply tegangan untuk motor DC, sedangkan Pin VSS kaki 16 IC L293D merupakan supply tegangan untuk IC L293D. pada Pin ground IC L293D dihubungkan dengan Heatsink, untuk mengurangi panas pada IC dikarenakan motor DC merupakan beban yang relatif cukup besar. H. Teknik PWM Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun, lebar pulsanya bervariasi. Lebar pulsa PWM berbanding lurus dengan amplitude sinyal asli yang belum termodulasi (dalam hal ini adalah sinus). Dengan kata lain sinyal PWM, frekuensi gelombangnya adalah konstan (tetap) namun duty cycle bervariasi (antara 0% hingga 100%), menurut amplitudo sinyal aslinya. 40 Gambar 19. Sinyal PWM (belajar-elektronika.com) Karena hanya ada 2 kondisi amplitudo sinyal PWM (yaitu Low dan High) maka dapat juga dikatakan bahwa sinyal PWM adalah sinyal yang informasinya terletak pada lebar pulsa. Gambar 20. Tegangan rata – rata PWM (belajar-elektronika.com) Gambar 20 menunjukan perubahan duty cycle akan merubah tegangan DC rata-rata. Jika gelombang PWM yang dihasilkan merupakan dari sintesis gelombang sinus maka tegangan DC rata-rata akan menunjukan sinyal sinus. Gelombang PWM yang difilter dapat digunakan untuk mengendalikan perangkat analog, dan menjadikan rangkaian pemfilter sebagai suatu digital – to – analog converter (DAC). 41 Ada beberapa alasan untuk memilih PWM: 1. Dalam pembangkitan PWM hanya butuh 1 bit dari mikrokontroler (bila di bandingkan dengan DAC konvensional butuh 8 bit, bahkan ada yang 10 bit). 2. Pada hakikatnya sinyal PWM merupakan sinyal yang ON dan OFF , driver-nya dapat dibangun dengan rangkaian BJT sedangkan DAC dibutuhkan rangkaian driver lebih komplek. Sinyal PWM dapat dihasilkan dengan berbagai cara, antara lain dengan cara : 1. Pembangkitan sinyal PWM dengan Comparator Dasar pembangkitan sinyal PWM adalah membandingkan tegangan V(+) non-inverting dengan tegangan V(-) inverting dengan menggunakan rangkaian comparator. Gambar 21. Rangkaian komparator (belajar-elektronika.com) Prinsip kerja pada rangkaian comparator adalah bila tegangan non - inverting V(+) lebih besar dari pada tegangan inverting V(-) maka keluaran pembanding akan mendekati Vdd. Sebaliknya, apabila tegangan inverting V(-) lebih besar dari tegangan non- 42 inverting V(+) maka tegangan keluaran pembanding akan mendekati Vss. Bila diberikan input pada Pin inverting berupa sinus dengan frekuensi tertentu, sedangkan pada input non- inverting berupa gelombang segitiga (berfungsi sebagai gelombang carrier) dengan frekuensi yang lebih tinggi (misal 10x frekuensi sinus) maka akan dihasilkan sinyal gelombang PWM. Gambar 22. Blok diagram pembangkitan PWM (belajar-elektronika.com) 2. Pembangkitan sinyal PWM dengan mikrokontroler Mengingat bahwa hanya ada 2 kondisi amplitudo sinyal PWM (yaitu Low dan High) sedang informasi PWM terletak pada perubahan lebar pulsanya, maka sinyal ini dapat di bangkitkan dengan mikrokontroler, yaitu dengan membuat suatu program yang menghasilkan sinyal seperti sinyal PWM.