bab i pendahuluan
advertisement

BAB I
PENDAHULUAN
I.1 Latar Belakang
Pasang surut laut (pasut) merupakan suatu fenomena pergerakan naik
turunnya permukaan air laut secara berkala yang diakibatkan oleh kombinasi gaya
gravitasi dan gaya tarik menarik dari benda-benda astronomi terutama oleh matahari,
bumi dan bulan. Pengaruh benda angkasa lainnya dapat diabaikan karena jaraknya
lebih jauh atau ukurannya lebih kecil(Dronkers dan Schönfeld, 1959). Fenomena
tersebut dapat diketahui dengan melakukan pengamatan pasut.
Tujuan dari pengamatan pasut adalah untuk mencatat atau merekam gerakan
vertikal dari permukaan air laut yang terjadi secara periodik, yang disebabkan oleh
gaya tarik-menarik antara bumi dan benda-benda langit khusunya matahari dan
bulan. Emery dan Thompson (1997) menyebutkan bahwa untuk mendapatkan
informasi pasang surut yang baik diperlukan adanya sejumlah persyaratan dasar yang
harus dipertimbangkan ketika merencanakan pengumpulan catatan data pasut
dilapangan, termasuk pertimbangan dasar seperti interval pencuplikan, lama
pengamatan dan lokasi pengamatan.
Informasi pasang surut mengenai karakteristik dan sifat pasang surut dapat
diperoleh setelah melakukan analisis harmonik pasut. Analisis harmonik pasut
dilakukan terhadap data pasut dengan periode waktu tertentu. Proses analisis
harmonik pasut menghasilkan gelombang harmonik yang biasa dinyatakan sebagai
konstanta harmonik pasut.
Pada umumnya analisis harmonik pasut menggunakan data pasut dengan
interval pencuplikan selama 1 jam untuk menentukan konstanta harmonik pasut
karena interval pencuplikan selama 1 jam sudah cukup menggambarkan grafik pasut,
namun tidak menutup kemungkinan dilakukan pencuplikan data pasut dengan
interval pencuplikan lebih dari 1 jam, misal 2 jam, 3 jam, 4 jam, dan seterusnya
Seperti yang ditunjukkan oleh Gambar I.1
1
2
Gambar I.1 Bentuk grafik pasut dengan variasi interval pencuplikan data
Gambar I.1 menunjukkan ilustrasi bentuk grafik sinusoidal dengan interval
pencuplikan data 1 jam, 2 jam, 4 jam, 5 jam, dan 6 jam secara visual, interval
pencuplikan lebih dari 1 jam sebagian ada yang masih menggambarkan bentuk grafik
sinusoidal dan sebagian ada yang tidak sepenuhnya bisa menggambarkan bentuk
grafik sinusoidal. Disisi lain, berdasarkan teori pemrosesan sinyal, sinyal analog
yang dicuplik secara diskrit dengan periode atau frekuensi cuplik agar tidak terjadi
kesalahan (yang kemudian diberi nama aliasing), Nyquist memberikan aturan bahwa
frekuensi cuplik minimal harus 2 (dua) kali lipat frekuensi maksimum yang
dikandung sinyal yang bersangkutan (Emery dan Thompson, 1997).
Berdasarkan hal tersebut dapat diketahui bahwa informasi pasang surut laut
bergantung pada interval pencuplikan datanya. Penelitian ini dimaksudkan untuk
mengetahui bagaimana interval pencuplikan data pasut berpengaruh terhadap nilai
konstanta harmonik pasut di stasiun pasut Sadeng, Yogyakarta.
3
I.2 Rumusan Masalah
Penelitian ini mengangkat masalah tentang pengaruh interval pencuplikan
data pasut terhadap nilai konstanta harmonik pasut yang didapat, oleh karena ini
dilakukan penelitian dengan membandingkan beberapa data pengamatan yang
selanjutnya dilakukan analisis harmonik pasut untuk mendapatkan nilai konstanta
harmonik pasut.
Dapat dirumuskan pertanyaan sebagai berikut :
1. Apa pengaruh interval pencuplikan data pasut terhanap nilai konstanta
harmonik pasut?
2. Sampai interval pencuplikan data pasut berapakah nilai konstanta pasut
tersebut bisa digunakan untuk melakukan analisis harmonik pasut ?
3. Interval pencuplikan data manakah yang paling optimal berdasarkan
perhitungan analisis harmonik pasut ?
I.3 Tujuan Penelitian
Tujuan dari penelitian ini adalah sebagai berikut:
1. Mengetahui seberapa besar pengaruh yang ditimbulkan oleh setiap interval
pencuplikan data pasut terhadap nilai konstanta pasutnya.
2. Mengetahui sampai interval pencuplikan data berapakah nilai konstanta pasut
tersebut bisa digunakan untuk melakukan analisis harmonik pasut.
3. Memberikan rekomendasi terkait pengambilan interval pengamatan data
pasut.
I.4 Manfaat Penelitian
Manfaat dari penelitian ini adalah untuk memberikan rekomendasi interval
pencuplikan data pasut yang optimal kepadapengguna data pasut. Misalnya untuk
keperluan penentuan bidang acuan kedalaman (Chart Datum) untuk menentukan
koreksi hasil pemeruman pada aplikasi survei hidrografi dan keperluan lainnya.
4
I.5 Batasan Masalah
Pembatasan masalah untuk penelitian ini adalah sebagai berikut:
1. Data yang digunakan merupakan data dari stasiun pengamatan pasut Sadeng.
2. Konstanta pasut yang dihitung berjumlah 7 buah kosntanta pasut yang
merupakan konstata utama pasut diurnal dan semidiurnal yaitu M2, S2, KI,
O1,P1, K2, N2.
3. Interval yang digunakan adalah interval 15 menit, 30 menit, 1 jam, 2 jam, 4
jam, 5 jam, 6 jam, dan 12 jam yang dimulai dari menit pertama dan tidak
mempertimbangkan offset pengamatan.
4. Kontrol kualitas data dilakukan dengan cara menghilangkan spike dan
mengisi data kosong dengan interpolasi cubic spline.
I.6 Tinjauan Pustaka
Rachman (2011) melakukan penelitian yang ditujukan untuk analisis
perbandingan dua periode pengamatan, yaitu periode pengamatan dalam 15 piantan
dan 29 piantanterhadap nilai konstanta harmonik yang dihasilkan. Tujuan dari
penelitian ini adalah untuk mengetahui variasi nilai chart datum, mengetahui tipe dan
karakteristik pasang surut di daerah stasiun pengamatan pasang surut Cilacap. Hasil
penelitian menunjukkan bahwa nilai kisaran chart datum pada stasiun Cilacap
memiliki nilai konstanta harmonik yang hampir sama dan menunjukkan tipe dan
karakteristik pasang surut yang sama yaitu tipe pasang surut campuran harian ganda.
Pangesti (2013) melakukan penelitian yang ditujukan untuk analisis lama
periode pengamatan data pesut terhadap nilai konstanta harmonik dan nilai surutan
peta yang dihasilkan. Penelitian ini menggunakan data pengamatan pasut pada kurun
waktu 2009-2011 yang dikelompokkan menjadi beberapa kelompok data, yaitu 15
hari, 29 hari, 6 bulan, 1 tahun, dan 3 tahun. Hasil dari penelitian ini menunjukkan
bahwa semakin panjang lama pengamatan data, cenderung menghasilkan konstanta
harmonik yang lebih banyak. Hal ini dibuktikan dari kelompok data 15 hari, 29 hari,
6 bulan, 1 tahun, dan 3 tahun, konstanta harmonik terbanyak dihasilkan oleh
kelompok data 3 tahun, yaitu sebanyak 69 konstanta harmonik. Dengan banyaknya
konstanta harmonik yang dihasilkan, maka nilai Z0 (surutan peta) semakin besar dan
nilai chart datum nya semakin rendah.
5
Banna (2013) melakukan penelitian yang ditujukan untuk membandingkan 3
data periode pasut yaitu data pasang surut selama periode panjang dari tahun 1984
sampai dengan tahun 2004 terhadap nilai konstanta harmonik pasut dan nilai Mean
Sea Level (MSL) yang dihasilkan. Pengelompokan data dibagi menjadi tiga
kelompok data yaitu, satu bulan berdasar periode revolusi Bulan, satu tahun berdasar
periode revolusi Bumi, dan 8.85 tahun berdasar periode presesi orbit Bulan, dimana
dicari nilai konstanta optimal yang dihasilkan dari ketiga data tersebut menggunakan
metode kuadrat terkecil, Hasil uji signifikansi menunjuk kelompok data 1 bulan dan
1 tahun berbeda secara signifikan terhadap kelompok data 8.85 tahun. Periode
pengamatan paling optimal dan efisien adalah periode 1 tahun, meskipun nilai
amplitudo yang dihasilkan berbeda namun dengan periode data lebih pendek mampu
memberikan jumlah konstanta harmonik dan nilai MSL yang tidak jauh berbeda dari
kelompok periode data 8.85 tahun.
Penelitian sebelumnya kebanyakan melakukan analisis lama pengamatan data
pasut terhadap nilai konstanta harmonik yang dihasilkan dan pada penelitian ini
digunakan data dari stasiun pasut Sadeng untukmelakukan analisis interval
pencuplikan data untuk mengetahui pengaruhnya terhadap nilai konstanta harmonik
yang dihasilkan.
I.7 Landasan Teori
I.7.1 Pasang Surut
Fenomena pasang surut diartikan sebagai naik turunnya muka laut secara
berkala akibat adanya gaya tarik benda-benda angkasa terutama matahari dan bulan
terhadap massa air di bumi,sedangkan menurut Dronkers dan Schönfeld (1959)
pasang surut laut merupakan suatu fenomena pergerakan naik turunnya permukaan
air laut secara berkala yang diakibatkan oleh kombinasi gaya gravitasi dan gaya tarik
menarik dari benda-benda astronomi terutama oleh matahari, bumi dan bulan.
Pengaruh benda angkasa lainnya dapat diabaikan karena jaraknya lebih jauh atau
ukurannya lebih kecil.
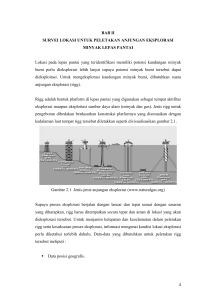
Pasang surut laut merupakan hasil dari gaya tarik gravitasi dan efek
sentrifugal. Efek sentrifugal adalah dorongan ke arah luar pusat rotasi. Gravitasi
bervariasi secara langsung dengan massa tetapi berbanding terbalik terhadap jarak.
6
Meskipun ukuran bulan lebih kecil dari matahari, gaya tarik gravitasi bulan dua kali
lebih besar daripada gaya tarik matahari dalam membangkitkan pasang surut laut
karena jarak bulan lebih dekat daripada jarak matahari ke bumi. Gaya tarik gravitasi
menarik air laut ke arah bulan dan matahari dan menghasilkan dua tonjolan (bulge)
pasang surut gravitasional di laut. Lintang dari tonjolan pasang surut ditentukan oleh
deklinasi, sudut antara sumbu rotasi bumi dan bidang orbital bulan dan matahari.
I.7.2 Gaya Pembangkit Pasut
Setelah Newton menemukan hukum gravitasi, hubungan pasut laut dengan
bulan dan matahari terungkap. Penemuan hukum gravitasi memungkinkan untuk
melakukan analisis pasut secara kuantitatif.Hukum gravitasi memberikan dasar untuk
teori pasut setimbang dengan memperhitungkan efek dari gaya tarik bulan dan
matahari terhadap lapisan bumi yang seluruhnya diliputi air dan menghasilkan pasut
laut setimbang atau equilibrium theory Menurut Newton pembangkit pasut dapat
dijelaskan melalui “teori gravitasi universal”, yang menyatakan bahwa pada dua
sistem benda dengan massa dan jarak tertentu mengalami gaya tarik menarik di
antara dua benda tersebut. Gaya ini dapat dituliskan dengan persamaan I.1 :
(I.1)
Dalam hal ini :
F
: gaya tarik menarik antara dua benda
k
: konstanta gaya tarik = 6,67 x 10-11 N kg-2 m-2
m1
: massa benda ( 1 )
m2
: massa benda ( 2 )
d
: jarak antara pusat benda ( 1 ) dan pusat benda ( 2 )
Pasut tidak hanya dipengaruhi gaya tarik menarik antara bumi dan benda-benda
angkasa sebagaimana ditunjukkan oleh persamaan I.1, namun juga dipengaruhi oleh
gaya sentrifugal yang akan timbul akibat rotasi bumi. Gaya pembangkit pasut
sebagai akibat adanya gaya tarik menarik dan gaya sentrifugal dapat dilihat pada
Gambar I. 2.
7
Bulan
Gaya Gravitasi
Bumi
Gaya Sentrifugal
Gambar I.2. Pengaruh gaya gravitasi bulan terhadap pasut.
(http://www.astro-photography.netdiakses pada tanggal 4 Mei 2014)
Keterangan:
F
= gayasentrifugal
N
= rotasi bumi
A,B
= resultan gaya tarik menarik bumi dan bulan
Gaya pembangkit pasut pada Gambar I.2 terjadi pada kondisi bumi ideal yaitu
kondisi bumi diasumsikan sebagai berikut:
1. Bumi berbentuk bola,
2. Permukaan bumi digenangi air yang homogen dengan kedalaman yang sama
(tanpa variasi topografi),
3. Bumi mengitari benda angkasa dengan kecepatan tetap dan orbit berbentuk
lingkaran, dan
4. Bidang orbit terletak pada bidang ekuator atau bidang orbit sebidang dengan
bidang ekuator bumi.
8
I.7.3 Tipe Pasang Surut Laut
Perairan laut memberikan respon yang berbeda terhadap gaya pembangkit pasut
sehingga terjadi tipe pasut yang berlainan di sepanjang pesisir. Ada tiga tipe pasut
yang dapat diketahui (NOAA, 2014) :
1. Tipe pasut diurnal.Yaitu bila dalam sehari terjadi satu satu kali pasang dan
satu kali surut. Biasanya terjadi di laut sekitar khatulistiwa.
2. Tipe pasut semi diurnal. Yaitu bila dalam sehari terjadi dua kali pasang dan
dua kali surut yang memiliki tinggi relatif sama.
3. Tipe pasut campuran.Yaitu gabungan dari tipe 1 dan tipe 2, bila bulan
melintasi khatulistiwa (deklinasi kecil), pasutnya bertipe semi diurnal, dan
jika deklinasi bulan mendekati maksimum, terbentuk pasut diurnal.
Tipe pasut diurnal, semi-diurnal, dan tipe pasut campuran dapat dilihat pada
gambar I.3 :
Gambar I.3. Tipe pasut
(http://oc.nps.edudiakses pada tanggal 4 Mei 2014)
9
I.7.4 Model Matematika Pasut dan Konstanta Harmonik Pasut
Variasi tinggi muka air laut yang terjadi pada suatu titik di permukaan bumi
dapat dinyatakan sebagai superposisi dari berbagai gelombang komponen harmonik
pasang surut. Dengan demikian tinggi muka air laut dapat dinyatakan dengan
persamaan I.2 sebagai berikut (Emery dan Thompson,1997):
∑
(
)
(I.2)
Keterangan:
: tinggi muka air pada waktu t, n = 1, 2, ...
: tinggi muka air rata-rata dari suatu datum
: amplitudo komponen ke- q
: fase gelombang komponen pasut ke-q pada t = 0
: frekuensi komponen ke – q
M
: jumlah komponen pasut
: residu pengamatan
π
: konstanta lingkaran
Nilai
amplitudo dan beda fase akibat gaya tarik benda angkasa terhadap
kondisi bumi setimbang dinyatakan dalam sebuah konstanta. Konstanta tersebut
disebut sebagai komponen harmonik pasut. Komponen – komponen harmonik pasut
utama tersebut antara lain disajikan pada Tabel I.1 :
Tabel I.1 Komponen harmonik utama pasang surut (Banna 2013).
Tipe Pasut
Semidiurnal
Keterangan
Simbol
Kec. Sudut
(⁰/jam)
Dipengaruhi oleh Bulan Utama
M2
28,9841
Dipengaruhi oleh Matahari Utama
S2
30,0000
bulan
N2
28,4397
Dipengaruhi oleh lintasan matahari berbentuk
K2
30,0821
K1
15,0411
Dipengaruhi oleh deklinasi Bulan Utama
O1
13,9430
Dipengaruhi oleh deklinasi Matahari Utama
P1
14,9589
Dipengaruhi
oleh
akibat
lintasan
berbentuk ellips
ellips
Diurnal
Dipengaruhi
oleh
deklinasi
Bulan
dan
deklinasi matahari
10
I.7.5 Analisis Harmonik Pasut
Salah satu metode untuk mengetahui karakteristik pasang surut di suatu tempat
adalah dengan melakukan analisis harmonik pasang surut. Analisis harmonik pasut
ini melakukan perhitungan nilai konstanta harmonik pasut yang meliputi perhitungan
nilai amplitudo dan beda fase masing-masing konstituen. Dasar hipotesa
yang
digunakan dalam analisis harmonik adalah teori Laplace yang menyatakan bahwa
gelombang komponen pasut setimbang selama penjalarannya akan mendapatkan
respon dari laut yang dilewatinya. Sehingga, amplitudo akan mengalami perubahan
dan fasenya akan mengalami keterlambatan, namun kecepatan sudut akan relatif
tetap (Emery dan Thompson, 1997).
Variasi tinggi muka laut di suatu tempat dinyatakan sebagai superposisi dari berbagai
gelombang komponen harmonik pasang surut.Dengan demikian tinggi muka air pada
saat t dapat dinyatakan pada persamaan I.2 (Emery dan Thompson, 1997).
I.7.5.1Analisis harmonik pasut dengan metode kuadrat terkecil
Secara prinsip analisis pasut bertujuan untuk menghitung konstituen harmonik
pasut yang meliputi beda fase komponen pasut dan amplitudo agar dapat digunakan
untuk prediksi pasut. Metode perhitungan yang digunakan adalah dengan metode
kuadrat terkecil. Persamaan I.2
dapat dijabarkan dengan menggunakan aturan
cosinus, menjadi persamaan I.3
∑
[
(
)
]
(I.3)
Dengan
dijelaskan pada persamaan I.4 dan I.5
dan
(I.4)
(I.5)
sehingga didapatkan hasil pada persamaan I.6 :
∑
[
(
)
]
Dalam persamaan I.6 terdapat dua variabel yang tidak diketahui yaitu,
(I.6)
dan
dalam hal ini dua variabel tersebut disajikan pada persamaan I.7 dan I.8:
⁄
(I.7)
11
(I.8)
Tujuan analisis dengan metode kuadrat terkecil dilakukan dengan meminimalkan
jumlah kuadrat residu pengamatan yang disajikan pada persamaan I.9 :
∑
∑
̂
(I.9)
dengan
V
̂
: Residu Pengamatan
adalah data pengamatan pasut dan x(n) adalah model matematis. Persamaan
I.9dapat diuraikan sebagai persamaan I.10 berikut :
(
)
∑
∑
{
∑
[̅
]}
(I.10)
dengan
∑
∑[
(
)
]
Keterangan:
: q/N Δt sehingga
=
: n Δt, waktu ke – n
T
: N Δt
N
: Jumlah data pengamatan
Maka dapat disajikan dalam persamaan I.11,
∑
∑
*
(
)
+
(I.11)
Kondisi yang diperlukan agar jumlah kuadrat residunya minimum adalah turunan
parsial terhadap parameter
dan
harus sama
dengan nol yang disajikan pada persamaan I.12 dan persamaaan I.13
∑*
(̅
∑ )+ [
(
)]
12
∑
∑
∑
*( ̅
(
*
(
)
+)
(
)+
)
(I.12)
dengan k = 0,1,2,…,M dan
∑*
∑
*( ̅
(
)
∑
∑
(̅
*
(
∑ )+ [
)
(
+)
)]
(
)+
(I.13)
dengank = 1,2,3,...,M dan
=
N.
Persamaan I.12 dan I.13 dapat disederhanakan penulisannya dalam bentuk matriks
seperti pada persamaan I.14(Emery dan Thompson, 1997).
Dz – y = 0
Dz = y
z = D-1y
(I.14)
Dengan matriks D adalah matriks koefisien dengan 2M+1 baris dan 2M+1 kolom,
matriks y mempunyai 2M+1 baris dan satu kolom serta matriks z memiliki 2M+1
baris dan satu kolom yang disajikan pada persamaan I.15:
2M+1D2M+1
=
(I.15)
[
]
dengan koefisien dalam matriks D disajikan pada persamaan I.16 sampai persamaan
I.20 sebagai berikut (Emery dan Thompson, 1997) :
∑
(
)
(I.16)
∑
(
)
(I.17)
13
dengan
=
∑
*
(
)
∑
*
(
)
(
)+
(I.19)
∑
*
(
)
(
)+
(I.20)
N, sehingga
(
)+
menjadi
(I.18)
. Persamaan I.16 sampai dengan I.20
dapat dinyatakan seperti pada persamaan I.21 sampai dengan persamaan I.25.
∑
(I.21)
∑
(I.22)
dimana
∑
[
]
∑
[
]
(I.24)
∑
[
]
(I.25)
(I.23)
adalah kecepatan sudut konstituen harmonik pasut ke-k, dengan k = 0, 1,
2,..M. Matriks z pada persamaan I.26 sebagai berikut:
2M+1z1
=
(I.26)
[
]
Matriks y pada persamaan I.27 sebagai berikut:
2M+1y1
=
(I.27)
[
]
14
dengan koefisien dalam matriks y yang disajikan pada persamaan I.28 dan
persamaanI.29 (Emery dan Thompson, 1997) :
∑
∑
(
)
(I.28)
∑
∑
(
)
(I.29)
Matriks z yang didapat pada persamaan I.26 berisi parameter terkoreksi
dan
. Parameter terkoreksi
digunakan untuk menghitung nilai amplitudo (
(
dan
) dan beda fase
) dengan persamaan I.7 dan amplitudo pada persamaan I.8.
I.7.5.2Menghitung nilai varian
Amplitudo (
) dan beda fase (
) dihitung menggunakan parameter terkoreksi
dengan persamaan I.7 dan persamaan I.8, untuk menghitung varian kovarian
amplitudo (
) dan beda fase (
) dapat dilakukan dengan menggunakan hukum
perambatan kesalahan pada persamaan I.30 (Mikhail dan Gracie, 1981):
̂
(I.30)
Keterangan:
G
: Matrik Jacobian
GT
: Transpose matrik G
: Matrik varian kovarian
: Matrik D
Matrik G pada persamaan I.31 sebagai berikut:
2MG2M+1
(I.31)
[
]
15
nilai varian aposteriori dapat ditentukan dengan persamaan 1.32(Foreman, 1997):
̂
(I.32)
dengan VTV = zTy - LTL (Foreman, 1997), N = jumlah pengamatan dan M
merupakan jumlah konstanta harmonik.
I.7.6 Periode Sinodik
Dalam analisis harmonik pasut dihitung amplitudo dan fase berdasarkan data
pengamatan tinggi muka air dalam jangka waktu tertentu dan frekuensi gelombang
pasut yang diketahui, untuk itu banyaknya gelombang komponen pasut yang dapat
diuraikan sangat begantung pada panjangnya data pengamatan.
Kriteria yang dapat digunakan untuk menentukan komponen apa saja yang
akan dihitung adalah kriteria Rayleigh yaitu, dua komponen pasut A dan B hanya
dapat dipisahkan satu sama lain, apabila lama pengamatan lebih dari suatu periode
tertentu yang disebut periode sinodik.Dengan persamaan I.33 sebagai berikut(Ali,
dkk., 1994):
(I.33)
Dengan:
PS
: periode sinodik dalam jam
: kecepatan sudut komponen A dan B dalam derajat/jam
Dengan kata lain periode sinodik adalah panjang data pengamatan minimal yang
harus digunakan untuk mendapatkan nilai amplitudo dan beda fase dari komponen A
dan B.
I.7.7Konsep Aliasing
Interval pencuplikan data yang jauh lebih besar dibandingkan interval waktu
pencuplikan (dt) data pasut pada umumnya yaitu setiap 1 jam. Dengan pengamatan
dt =1 jam akan mencerminkan karakter fenomena pasut, sedangkan jika dt > 1 jam
maka semakin tidak menggambarkan fenomena pasut sebenarnya. Hal ini dikatakan
sebagai fenomena aliasing frekuensi komponen pasut, yaitu berubahnya frekuensi
asli komponen pasut menjadi frekuensi palsu (alias) yaitu nol, setengah tahunan,
maupun tahunan.
16
Frekuensi alias adalah frekuensi yang menyamar sebagai frekuensi lain.
Dikretisasi
yang buruk terhadap data time series mengakibatkan
terjadinya
aliasing suatu frekuensi menjadi frekuensi alias atau palsu. Ilustrasinya, untuk
suatu data diskrit dengan interval waktu yang sama maka hanya komponen frekuensi
yang ada dalam kisaran frekuensi utama (Nyquist) yang dapat ditentukan. Kisaran
frekuensi utama tersebut disajikan pada persamaaan I.34 sebagai berikut (Emery dan
Thompson, 1997) :
-ƒN ≤ ƒ ≤ -ƒ0 , ƒ0 ≥ ƒ ≥ ƒN ,
ƒn ≥ 0
(I.34)
Dengan frekuensi utama disajikan pada persamaan I.35:
ƒN =
(I.35)
dengan,
ƒN = frekuensi Nyquist ( frekuensi utama)
ƒ0 = 0
Frekuensi yang dapat dianalisis adalah frekuensi komponen pasut yang berada
dalam kisaran frekuensi nol sampai frekuensi utama. Jika frekuensi komponen pasut
berada diluar kisaran tersebut maka tidak dapat dianalisis. Pencuplikan data dengan
dt yang semakin besar akan mempersempit kisaran frekuensi utama dan frekuensi
komponen yang dianalisi akan semakin menjauh dari kisaran frekuensi utama. Agar
dapat dianalisis, maka frekuensi komponen yang berada diluar frekuensi utama harus
ditentukan frekuensi aliasnya yang berada dalam kisaran frekuensi utama dengan
cara folding (pelipatan) balik ( kekiri).
Frekuensi suatu komponen yang berada diluar kisaran frekuensi utamanya
dapat ditentukan frekuensi aliasnya. Bila suatu frekuensi komponen ƒp , akibat dt
yang besar, tidak berada dalam kisaran 0 dan ƒN, melainkan terletak pada kisaran kƒN
dan (k-1) ƒN , maka nilai ƒp pada kisaran (k-1) ƒN dan (k-2) ƒN diperoleh dengan
menggunakan persamaan I.36 berikut (Emery dan Thompson, 1997):
ƒp(k-1) = ƒN(k-1) – (ƒp(k) - ƒN(k-1) )
dengan
k= bilangan lipatan
p = komponen pasut p
(I.36)
17
Frekuensi aliasing dihitung dengan metode folding menggunakan langkahlangkah sebagai berikut (Yanagi, et al., 1997) dalam (Nurmaulina, 2008) :
1. Menghitung frekuensi Nyquist (frekuensi terkecil yang bisa diamati oleh data
pengamatan dengan interval waktu pengamatan yang ada)
2. n = round ( x ƒ ), ƒ = frekuensi asli komponen pasut
3. ƒa = 2 mƒN±ƒ , m = 0,1,2, ... , n
I.7.8 Pengamatan Pasut
Pengamatan pasut bertujuan untuk mencatat atau merekam gerakan naik
turunnya permukaan air laut yang terjadi secara periodik, yang disebabkan oleh gaya
tarik-menarik antara bumi dengan benda-benda angkasa terutama bulan dan
matahari. Untuk mendapatkan informasi tersebut diperlukan suatu stasiun
pengamatan pasut yang perlu memperhatikan hal-hal sebagai berikut:
1. Lokasi yang mudah dijangkau dan struktur bangunannya kokoh.
2. Ditempatkan di lokasi yang mudah diamati dalam berbagai cuaca.
3. Lokasi stasiun pasut hendaknya sedekat mungkin dengan benchmark
atau titik referensi yang ada.
4. Lokasi stasiun pasut hendaknya ditempatkan di lokasi yang mewakili
keadaan karakteristik daerah tersebut.
5. Kondisi air laut sebaiknya bersih untuk memudahkan pengamatan.
Peralatan yang digunakan dalam pengamatan pasut untuk penelitian ini
adalah alat pengamat pasut jenis tekanan (pressuretype tide gauge). Tipe ini
menggunakan tekanan air di atas suatu unit yang berubah-ubah akibat besar kecilnya
lapisan air di atas unit sensor tersebut sesuai gerakan turun naiknya permukaan laut.
Perubahan tekanan ini diteruskan ke unit recorder melalui selang udara yang
biasanya terbuat dari karet atau plastik (Gambar I.6).
18
Gambar I.6Pressure Tide Gauge
(http://www.psmsl.orgdiakses pada tanggal 4 Mei 2014)
I.7.9Kontrol Kualitas Data
Kontrol kualitas data pasut bertujuan untuk mendeteksi adanya suatu anomali
yang tak terduga pada suatu time series data pasut, misalnya data spikes dan data
kosong.Kontrol kualitas data pasut dilakukan dengan cara membandingkan data
pengamatan pasut dengan data pasut hasil prediksi.Kedua grafik pasut data asli dan
data prediksi secara sistematis divisualisasikan bersama dengan residu antara data
pengamatan dan data prediksi seperti pada Gambar I.7. Analisis residu ini digunakan
untuk mendeteksi anomali data pasut yang mungkin terjadi (Tides Control Quality by
SHOM, 2014).
19
Data asli
Data prediksi
Residu = Data asli -Data prediksi
Gambar I.7Plot data pengamatan, data prediksi, dan residu
(http://www.sonel.org/_Quality-control-of-the.htmldiakses pada tanggal 5Juli 2014)
Proses kontrol kualitas data dapat dilakukan secara numeris yaitu dengan
melakukan uji global pada data pasut. Pada uji global salah satu rentang kepercayaan
yang dipakai adalah 2 atau 95%. Pengecekan dilakukan dengan menghitung
standard deviasi pada semua data pasut menggunakan persamaan I.37 :
̅
(I.37)
Keterangan :
: standard deviasi
Xi
: nilai data ke i
̅
: nilai rata-rata data setiap tahun
n
: jumlah data
kemudian menghitung batas kanan dan batas kiri untuk data pasut tersebut, yaitu
dengan persamaan (I.38) dan persamaan (I.39) :
Batas Kanan = ̅ + 2
(I.38)
=̅ -2
(I.39)
Batas Kiri
20
Data pasut yang diterima nilainya adalah data yang masuk diantara batas kanan dan
batas kiri, data yang memiliki nilai diluar batas kanan dan kiri dianggap sebagai
anomali dan nilainya diubah menjadi data kosong.
I.7.10Data spike
Data spike merupakan kesalahan sistematik yang disebabkan oleh kesalahan
pencatatan oleh alat perekaman data pasut, oleh sebab itu data spike harus
dihilangkan.Koreksi spike dilakukan pada data pasut yang memiliki nilai ekstrim.
Nilai ekstrim tersebut ditunjukkan dari adanya titik yang melonjak naik atau turun
dalam sebuah grafik.
Data spike dapat dihilangkan dengan cara sebagai berikut :
1.
Melakukan prediksi selama 369 menggunakan data pasut 1 bulan hasil
pengamatan. Data prediksi ini merupakan data yang dianggap benar.
2.
Menghitung selisih antara data ke-i dari data pengamatan pasut dengan data
ke-i dari data prediksi. Nilai selisih ini sebagai nilai x
3.
Menghitung nilai rata-rata dan standar deviasi dari selisih tersebut
menggunakan persamaan (I.37).
4.
Menentukan batas kanan dan batas kiri untuk data yang akan dikontrol
kualitasnya menggunakan persamaan (I.38) dan (I.39).
5.
Melakukan pengecekan data pasut, apabila nilai x terletak antara batas kanan
dan batas kiri maka data tersebut memiliki kualitas baik dan dapat digunakan
untuk proses analisis harmonik. Apabila nilai x terletak diluar batas kanan
dan batas kiri maka data tersebut dihapus nilainya dan dianggap sebagai data
kosong.
I.7.11 Interpolasi Cubic Spline
Prinsip dasar interpolasi cubic spline adalah untuk mencocokkan suatu kurva
terhadap data-data pengamatan, biasanya dipakai fungsi polinomial. Interpolasi
polinomial berderajat tinggi biasanya akan berosilasi dan tidak stabil, sebaliknya
polinomial sepotong-potong derajat rendah memberikan hasil yang lebih baik untuk
pencocokan data. Metode yang paling mudah adalah menghubungkan setiap titik
dengan garis lurus, yang disebut interpolasi linier bertahap. Namun akibatnya
kemiringan kurva berubah secara drastis dan menjadi tidak andal. Oleh karena itu
21
sebagai alternatif yang lebih baik adalah interpolasi metode cubic spline karena
metode ini menggunakan polinomial sepotong-sepotong yang menghasilkan
pencocokan data yang lebih baik (Matlab helpdesk, 2008).
Interpolasi cubic spline menggunakan polinom orde 3 untuk setiap selangnya.
Secara umum polinom orde 3 dinyatakan dalam persamaan I.40(Istarno, 2014) :
fi(x) = aix3 + bix2 + cix + di
(I.40)
Dengan :
ai, bi, ci, di
: koefisien
x
: titik ke-x
Untuk n+1 titik data ( i=0,1,2... n), terdapat n selang dan akibatnya terdapat 4n
koefisien. Untuk memecahkan koefisien tersebut diperlukan 4n persamaan kondisi,
yaitu (Istarno, 2014):
1. Nilai-nilai fungsi sama pada simpul dalam (2n-2 kondisi)
2. Fungsi-fungsi pertama dan terakhir harus melalui titik-titik ujung (2 kondisi),
3. Turunan-turunan pertama pada simpul dalam harus sama (n-1 kondisi).
4. Turunan-turunan kedua dari simpul dalam harus sama (n-1 kondisi).
5. Turunan-turunan kedua dari titik-titik ujung adalah nol (2 kondisi).
Syarat no 5 menyebabkan pada simpul ujung fungsi akan berupa garis lurus.
Permasalahan yang dihadapi untuk memecahkan persamaan kondisi diatas adalah
dimensi matrik yang cukup besar. Sebab untuk n+1 titik jumlah koefisien yang dicari
adalah 4n. Untuk mengatasi permasalah tersebut maka dilakukan penurunan cubic
spline dan dengan menerapkan syarat syarat tersebut,maka diperoleh persamaan I.41
untuk setiap selang(Istarno, 2014) :
*
*
+
+
(I.41)
Persamaan I.41 mengandung 2 koefisien, yaitu turunan kedua pada ujung tiap selang.
Koefisien-koefisien tersebut dapat dihitung dengan menggunakan persamaan I.42
berikut:
(I.42)
22
Jika persamaan I.42 ini dituliskan untuk semua simpul dalam, maka dihasilkan (n-1)
persamaan dengan n-1 koefisien (Istarno, 2014).
I.7.11Uji signifikansi antar dua buah sampel
Penelitian ini membandingkan antar dua macam data sampel yaitu nilai
amplitudo data dengan interval pengamatan 1 jam dengan nilai amplitudo data
dengan interval pengamatan lainnya serta membandingkan nilai beda fasedata
dengan interval pengamatan 1 jam dengan nilai beda fase data dengan interval
pengamatan lainnya. Untuk mengetahui hubungan dan signifikansi perbedaan antar
data sampel tersebut perlu dilakukan uji statistik komparatif menggunakan tabel
distribusi t. Dengan rumus separated varians pengujian hipotesis komparatif dua
sampel yang disajikan dalam persamaan I.37 sebagai berikut (Sugiyono, 2007) dalam
(Banna, 2013):
̅
̅
(I.37)
√
Dengan :
: nilai hasil hitungan uji t
: varian sampel pertama
: varian sampel kedua
̅
: nilai rata-rata sampel pertama
̅
: nilai rata-rata sampel kedua
: jumlah data sampel pertama
: jumlah data sampel kedua
Hasil uji t digunakan untuk menjawab hipotesis yang diajukan. Hipotesis awal
(Ho) diterima apabila nilai hasil hitungan uji t lebih kecil dari nilai t tabel ( t hitungan<
ttabel ). Apabila nilai hasil hitungan uji t lebih besar dari nilai t tabel ( thitungan> ttabel ),
maka Ho ditolak dan hipotesis tandingan (Ha) yang diterima.
23
I.8 Hipotesis
Data dengan interval pencuplikan yang lebih kecil akan memiliki nilai
amplitudo dan fase yang lebih akurat dibandingkan amplitudo dan fase data dengan
interval pencuplikan yang lebih besar.