BAB IV UJI COBA DAN ANALISA
advertisement

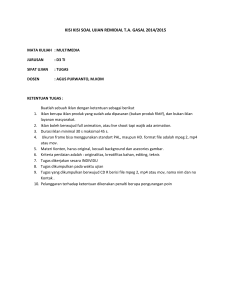
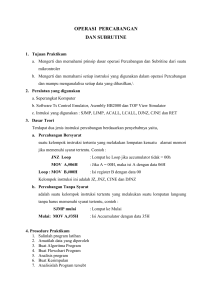
70 BAB IV UJI COBA DAN ANALISA 4.1.1. Uji Coba Setelah melakukan perancangan dan pemasangan komponen, selanjutnya adalah melakukan serangkaian uji coba pada masing – masing blok rangkaian yang bertujuan untuk mendapatkan kesesuaian spesifikasi dan hasil yang diinginkan. Untuk lebih jelas mengenai pembahasan hasil uji coba yang akan dilakukan dapat di lihat pada sub bab berikut. 4.1.1. Pengujian Rangkaian Catu Daya Catu daya sebagai suplai tegangan kerja merupakan bagian yang sangat penting. Dalam realisasi perangkat keras disini membutuhkan catu daya yang besarnya adalah +5 volt. Gambar 4.1 adalah merupakan gambar rangkaian catu daya berikut dengan titik yang berikan dengan tanda angka yang kemudian akan ditampilkan dari hasil pengujian tersebut berdasarkan angka yang tertera pada rangkaian tersebut. 1A T1 3A 18 VAC DIODA BRIDGE 2A 220 VAC D1 4A 7812 + 7805 + C1 + 12V + 5V + C2 0 C3 GND 1B Gambar 4.1. Pengujian Rangkaian Catu Daya Dari hasil pengujian pada rangkaian diatas didapatkan hasil yang terukur sebenarnya adalah sebagai berikut : 1. Hasil pengukuran antara Point (1A) dengan (1B) yang merupakan keluaran dari kumparan sekunder transformator yang masih berupa 71 tegangan AC sebesar 18 volt. Setelah dilakukan pengukuran adalah sebesar 20 volt AC. 2. Hasil pengukuran keluaran dari komponen dioda bridge yaitu point (2A) dengan Ground ( - ) adalah sebesar 17,80 volt. 3. Hasil untuk pengukuran catu daya +12 volt dari keluaran IC regulator LM7812 (3A) adalah +11,86 volt. 4. Hasil untuk pengukuran catu daya +5 volt dari keluaran IC regulator LM7805 (4A) adalah +4,88 volt. Dari hasil pengujian diatas, tegangan yang keluar dari transformator masih berupa tegangan AC (Alternating Current), agar supaya tegangan menjadi DC (Direct Current) maka digunakan dioda bridge, selanjutnya tegangan difilter oleh C1 (Capasitor), didalam rangkaian menggunakan jenis capasitor electrolit, dimana fungsinya yaitu untuk menghasilkan tegangan yang murni yang dikeluarkan oleh dioda bridge, selanjutnya untuk mendapatkan sumber tegangan sebesar 12 Volt, maka digunakan IC regulator 7812, tegangan yang dikeluarkan oleh IC regulator difilter kembali oleh C2 yang jenis dan fungsinya sama dengan C1, kemudian untuk menghasilkan tegangan sebesar 5 Volt, maka digunakan IC regulator 7805, dimana keluaran dari IC ini juga ditambah C3, jenis dan fungsinya sama dengan C1 dan C2, agar dapat menghasilkan tegangan ynag benar-benar murni, dari fungsi dan hasil pengukuran rangkaian diatas, didapatkan hasil pengukuran yang masih dalam batas toleransi yang diizinkan, sehingga rangkaian catu daya ini sudah dapat digunakan dengan baik. 72 4.1.2. Pengujian Rangkaian Sensor Photodioda Pada bagian sumber cahaya menggunakan dua buah led bright yang jarak antar kedua pemancar cahaya tersebut telah ditentukan yaitu 10 cm yang akan digunakan pada saat perhitungan konversi mikrokontroler dalam satuan meter perdetik (M/S). Led bright digunakan karena pancaran cahayanya lebih terang daripada led biasa dan cahayanya dapat digunakan sebagai pemicu sensor photodioda. +5V 2A 1,5K IC2D 12 11 13 74HC132N 1A 1B 2B Gambar 4.2. Pengujian Rangkaian Sensor Photodioda Photodioda merupakan komponen yang sensitif terhadap cahaya, jika photodioda ini terkena cahaya, maka akan meningkatkan jumlah pembawa minoritas dan arus baliknya makin besar, rangkaian ini terdiri dari bahan peka cahaya yang apabila belum terkena cahaya tegangan pada titik tengah antara photodioda dan R adalah 4,7 volt (1A) , dan sebaliknya apabila terkena cahaya maka akan melewatkan arus balik sehingga keluarannya sekitar 0,02 volt (1B), keluaran seperti ini belum bisa di terima oleh mikrokontroler, karena mikrokontroler hanya mengenal logika 1 (5 volt) dan logika 0 (0 volt), untuk mengatasi hal ini, maka dibutuhkan IC 74HC132N, dimana IC ini didalamnya terdapat 4 buah gerbang NAND yang mempunyai 2 masukan setiap gerbangnya. Gerbang ini mengubah keluaran dari sensor photodioda pada saat cahaya laser tidak terhalang 73 oleh benda sebesar 0,02 volt menjadi 5 volt (2B), dan pada saat cahaya laser terhalang oleh benda tegangannya sebesar 4,7 volt menjadi 0 volt (2A), tegangan ini mampu dideteksi oleh mikrokontroler, karena mikrokontroler hanya mengenal logika 1 (5 volt) dan logika 0 (0 volt). Tabel 4.1. Tabel Kebenaran Gerbang NAND NAND A B Y 0 0 1 0 1 1 1 0 1 1 1 0 4.1.3. Pengujian Rangkaian Mikrokontroler dan LCD Pengujian pada rangkaian mikrokontroler ini dilakukan dengan dihubungkan langsung dengan modul LCD. Yang kemudian diberikan tegangan kerja sebesar 5 volt. Dan dilakukan pemutaran pada trimpot 10 KΩ, untuk mendapatkan kecerahan display yang sesuai dengan kebutuhan. Uji coba selanjutnya yaitu dengan mencoba memasukkan listing program sederhana untuk inisialisasi LCD dan menampilkan string ”A” pada display LCD. Setelah listing program dimasukkan kedalam mikrokontroler AT89S52, langkah selanjutnya adalah melihat tampilan LCD yang sudah sesuai dengan yang diinginkan. Maka sudah dipastikan rangkaian mikrokontroler dan LCD dapat digunakan. Adapun penggalan dari listing program yang pakai dalam serangkaian uji coba tersebut adalah sebagai berikut : 74 1. Listing Program Inisialisasi LCD : INIT_LCD: MOV CALL MOV CALL MOV CALL RET R1 WRITE_INST R1,#00111000B WRITE_INST R1,#00001100B WRITE_INST 2. Listing Program Pengirim Instruksi ke LCD : WRITE_INST: CLR MOV SETB CALL CLR RET RS P0,R1 EN DELAY EN 3. Listing Program Pengirim Data ke LCD : WRITE_DATA: SETB MOV SETB CALL CLR RET RS P0,R1 EN DELAY EN 4. Listing Program Waktu Tunda : DELAY: MOV R0,#0 MOV DJNZ DJNZ RET R7,#0FH R7,$ R0,DELAY1 DELAY1: 5. Listing Program Utama LCD : ORG 00H CALL INIT_LCD MOV CALL MOV CALL R1,#80H WRITE_INST R1,#’A’ WRITE_DATA SJMP STOP START: STOP: 4.2. Analisa Proses analisa dilakukan untuk mendapatkan kesesuaian antara perangkat keras yang sudah di ujicoba dengan perangkat lunak yang telah 75 dimasukkan kedalam mikrokontroler AT89S52. Hasil analisa dari listing program dan akan diberikan gambar tampilan display pada Liquid Crystal Display ( LCD ). Pada listing program utama akan ditampilkan sebagai berikut : 1. Listing program awal : START: MOV CALL SPASI_XX: MOV CALL MOV R7,#16 PSS_A1 A,#' ' KIRIM_KARAKTER R6,#0FFH 2. Listing program sensor pertama dalam kondisi siap di lewati benda : DITUNGGU: JB PUSH CALL POP SPASI_XXX: DJNZ DJNZ CALL MOV MOV STARTING: CLR MOVC CALL INC MOV MOV SENSOR_1,SPASI_XXX ACC SCANNING ACC R6,DITUNGGU R7,SPASI_XX PSS_A1 R7,#16 DPTR,#TULISAN A A,@A+DPTR KIRIM_KARAKTER DPTR R6,#0FFH R5,#100 3. Listing program sensor pertama dalam kondisi proses mendeteksi kecepatan : DITUNGGUX: JB PUSH PUSH PUSH CALL POP POP POP STARTING: DJNZ SENSOR_1,STARTING DPH DPL ACC SCANNING DPH DPL ACC R6,DITUNGGUX 76 DJNZ R5,DITUNGGUX DJNZ R7,STARTING MOV R7,#16 CALL PSS_A1 XSPASI_XX: MOV A,#' ' CALL KIRIM_KARAKTER MOV R6,#0FFH DITUNGGUXX: JB SENSOR_1,XSPASI_XXX PUSH ACC CALL SCANNING POP ACC XSPASI_XXX: DJNZ R6,DITUNGGUXX DJNZ R7,XSPASI_XX CALL PSS_A1 MOV R7,#16 MOV DPTR,#XTULISAN XSTARTING: CLR A MOVC A,@A+DPTR CALL KIRIM_KARAKTER INC DPTR MOV R6,#0FFH MOV R5,#100 DITUNGGUXXXX: JB SENSOR_1,XSTARTING PUSH DPH PUSH DPL PUSH ACC CALL SCANNING POP DPH POP DPL POP ACC XSTARTING: DJNZ R6,DITUNGGUXXXX DJNZ R5,DITUNGGUXXXX DJNZ R7,XSTARTING LJMP START 4. Listing program sensor kedua mendeteksi batas kecepatan dari benda dan menampilkan hasil pendeteksian ke LCD: SCANNING: SCAN_20_0: CALL JB MOV JMP ISI_20_0 SENSOR_2,SCAN_19_9 DPTR,#DS_20_0 TULIS_LCD_BAWAH Langkah pertama akan menampilkan pesan informasi “Ukur Kecepatan” dan “By:ARIS-MERCU”, setelah itu “-JARAK v/s WAKTU” dan “SISTEM READY”, tulisan ini menandakan bahwa sistem telah siap 77 mendeteksi kecepatan dari sebuah benda, Berikut adalah subrutin untuk menampilkan pesan informasi tersebut. Program tampilan tulisan awal pada LCD : MULAI: MOV A,#TULISAN CALL TULIS_LCD_2_BARIS TULISAN: DB '-UKUR KECEPATAN-' DB 'Sistem Komputer' TULISANE: DB ' Sistem Ready ' XTULISANE: DB '-JARAK V/S WAKTU' TULIS_LCD_2_BARIS: CALL TULIS_LCD_ATAS CALL TULIS_LCD_BAWAH TULIS_LCD_ATAS: CALL PSS_A1 JMP TLCDB TULIS_LCD_BAWAH: CALL PSS_B1 TLCDB: MOV URUTAN,#16 RET ; ; ; ; ; ; ; Register A, akan menyimpan data yang tersimpan pada alamat RAM #TULISAN, sehingga ketika listing program yang pertama di eksekusi maka isi register A=#TULISAN, yang dimaksudkan untuk memanggil string tulisan, Kemudian pada instruksi yang ke dua program akan memanggil subrutin TULIS_LCD_2_BARIS, yang bertujuan untuk mengirimkan inisialisasi perintah ke LCD. Selanjutnya data string yang tersimpan pada lebel TULISANE akan disimpan pada register 16 bit, yang kemudian data yang sudah tersimpan pada register 16 tersebut akan dikirim dengan cara memanggil subrutin TULIS_LCD_ATAS, dan data string tersebut siap dikirim ke LCD pada baris pertama. Tulisan string tersebut adalah “Ukur Kecepatan”, tulisan ini akan ditampilkan pada bagian tengah atas display LCD. 78 Masih dalam tampilan yang sama, pada baris ke dua juga ditampilkan teks pada LCD dengan langkah pertama mengisi Register A dengan data yang tersimpan pada alamat RAM internal dengan memanggil subrutin TULIS_LCD_BAWAH. Kemudian pada listing program berikutnya adalah melakukan pengiriman instruksi perintah pada LCD yang akan memerintahkan pada LCD untuk ditampilkan pada baris kedua. Teks yang ditampilkan adalah “By:ARIS-MERCU”, tampilan dari kedua teks tersebut dapat dilihat pada gambar berikut : Gambar 4.3. Tampilan LCD Awal Proses berikutnya sama seperti langkah pada proses diatas, dimana program dalam kondisi siap untuk mendeteksi benda yang akan melewati kedua sensor. Selama sensor 1 dan 2 tidak dilewati oleh benda maka LCD akan menampilkan teks yang berupa tulisan “sistem Ready” dan tulisan “JARAK V/S WAKTU” secara bergantian, apabila ada benda yang melewati kedua sensor, maka program akan mengeksekusi kecepatan dari benda tersebut, kemudian LCD akan menampilkan hasil penghitungan dari benda tersebut, seperti yang terlihat pada gambar 4.4, tetapi apabila benda hanya melewati sensor 1 saja, maka akan tampil tulisan “TIDAK TERDETEKSI” Seperti yang terlihat pada gambar 4.5. 79 Gambar 4.4. Tampilan Hasil Penghitungan Kecepatan Benda Gambar 4.5. Tampilan Hasil Pengukuran Tidak Terdeteksi Pada gambar 4.4. terlihat hasil pengukuran 20,0 m/det, hasil pengukuran tersebut masih dalam satuan meter perdetik, artinya dalam 1 detik benda tersebut mampu menempuh kecepatan 20,0 meter, dan apabila sensor 1 dan sensor 2 kembali dilewati oleh sebuah benda maka sistem akan langsung menampilkan hasil penghitungan kecepatan dari benda tersebut tanpa harus mereset hasil penghitungan benda sebelumnya. 4.3 Metode Black Box Pengukuran Kecepatan UKURAN SKENARIO SKENARIO TAMPILAN KECEPATAN TAMPILAN UKURAN KECEPANAN Ukuran Kecepatan Ukuran Tulisan Awal Kecepatan BY,Aris Mercu Kecepatan Penampilan Hasil Pengukuran Tulisan Jarak KET Ukuran OK OK Jarak Penampilan Apabila Pengukuran Tidak Tampilan V/S Waktu V/S Waktu Terdeteksi OK