PENGENDALI MOTOR SERVO DC STANDARD DENGAN
advertisement

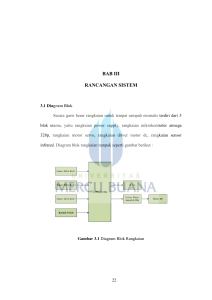
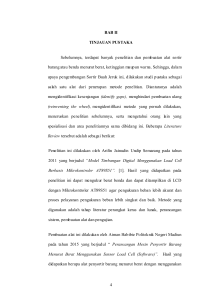
PENGENDALI MOTOR SERVO DC STANDARD DENGAN BERBASIS MIKROKONTROLER AVR ATMEGA8535 Purwanto Jurusan Teknik Elektro, Fakultas Teknologi Industri, Universitas Gunadarma, Margonda Raya 100 Depok 16424 telp (021) 78881112, 7863788 Tanggal Pembuatan : 15 Oktober 2009 Sebuah pengendali motor servo DC standar jarak jauh dengan mikrokontroler AVR ATmega8535 yang akan digunakan untuk mengemudikan roda depan robot mobil dengan menggunakan motor servo DC standar. Perancangan menggunakan mikorokontroler AVR ATmega8535 sebagai pengendali kerja dengan masukan dari tegangan yang di timbulkan oleh potensiometer dimana setir di gunakan sebagai pengerak potensiometer. Untuk pengirim dan penerima jarak jauh menggunakan RF (radio frekwensi) Yishi 1020 yang terhubung dengan mikrokontroler. Sinyal kendali yang ditimbulkan oleh tegangan potensiometer diproses oleh mikrokontroler dikirimkan ke penerima untuk menggerakan motor servo. Gerakan motor servo ini digunakan untuk menggerakan piringan. Posisi sudut piringan di ubah menjadi tegangan yang di timbulkan oleh potesiometer, dimana gerakan potensiometer mengikuti gerakan piringan pada motor servo. Besar sudut piringan pada motor servo DC standar di tampilkan pada seven segment yang merupakan hasil pergerakan. Dari hasil pengujian di dapat bahwa alat pengendali motor servo berfungsi dengan baik namun masih terdapat kekurangan pada ketepatan perputaran antara setir dengan motor. 1. PENDAHULUAN Seiring dengan perkembangan teknologi yang semakin pesat. Dimana peran manusia digantikan dengan mesin atau robot dalam melakukan suatu pekerjaan. Pengendalian motor servo DC standart ini banyak digunakan untuk pengendalian robot sebagai pengerak. Seperti pengerakan robot beroda dan robot berkaki yang menggunakan banyak motor servo yang dikendalikan dalam sistem kontrol. Akan tetapi permasalahan yang muncul saat ini bagaimana cara mengendalikan motor servo. Salah satu dengan penggunaan mikrokontroller yang memungkinkan untuk membuat sistem kendali yang bisa didesain dan di program sendiri (custom made) sesuai spesifikasi alat yang akan dibuat atau kendali yang dibutuhkan. Karena kemampuan mikrokontroler yang tinggi, bentuknya yang kecil, konsumsi daya yang rendah dan harga yang murah maka mikrokontroler begitu banyak digunakan mulai dari mainan anak-anak, perangkat elektronik rumah tangga, perangkat pendukung otomotif, peralatan telekomunikasi sampai dengan pengendali robot serta persenjataan militer. hal ini memberikan ide bagi penulis untuk menciptakan suatu alat pengendali motor servo DC standart dengan berbasis mikrokontroler avr atmega8535 yang akan direcanakan untuk pengendalian robot mobil untuk memutarkan roda depen robot mobil agar dapat berputar ke kanan dan ke kiri. Dengan batas perputar 180 derajat, ke kanan 90 derajat dan ke kiri 90 derajat. 2. LANDASAN TEORI Mikrokontroler merupakan suatu komponen elektronika yang didalamnya terdapat rangkaian mikroprosesor, memori (RAM/ROM) dan I/O, rangkaian tersebut terdapat dalam level chip atau biasa disebut single chip microcomputer. Pada Mikrokontroler sudah terdapat komponen-komponen mikroprosesor dengan bus-bus internal yang saling berhubungan. Komponen-komponen tersebut adalah RAM, ROM, timer,komponen I/O paralel dan serial, dan interrupt kontroler. Adapun keunggulan dari Mikrokontroler adalah adanya sistem interrupt. Sebagai perangkat kontrol penyesuaian, mikrokontroler sering disebut juga untuk menaikkan respon eksternal (interrupt) pada waktu yang nyata. Perangkat tersebut harus melakukan hubungan switching cepat, menunda satu proses ketika adanya respon eksekusi yang lain. 2.1 Mikrokontroler AVR ATMEGA8535 Mikrokontroler AVR memilki arsitektur RICS 8 bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar adalah IC mikrokontroler dengan tegangan rendah, teknologi terbaru dari PEROM (Programable Erase Read Only Memory). Alat ini dibuat oleh ATMEL dengan tingkat ketelitian tinggi. 2.2 Penjelasan Fungsi AVR ATMEGA8535 Pin Mikrokontrtoller Mikrokontroller ini memiliki 40 konfigurasi pin seperti digambarkan pada Gambar 2.1. Fungsi dari tiap-tiap pin dapat dikelompokkan menjadi sumber tegangan, kristal, kontrol dan input-output. Disamping itu Mikrokontroler ini dapat ditambahkan sebuah minimum memori eksternal atau komponen eksternal lain. Dari kedelapan line dapat digunakan sebagai suatu unit yang berhubungan ke perangkat parallel seperti printer, pengubah digital ke analog, dan sebagainya, atau tiap line dapat mengoperasikan sendiri ke perangkat single bit seperti saklar, LED, transistor, solenoid, motor, dan speker. Gambar 2.1 .Konfigurasi Kaki IC Mikrokontroler AVR ATMEGA8535 Berikut adalah penjelasan fungsi tiap kaki yang biasa ada pada seri mikrokontroler AVR Atmega8535 yaitu : A. Pin 1 sampai 8 Ini adalah port B yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum port B digunakan. Bit – bit DDRB diisi 0 jika ingin memfungsikan pin – pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin- pin port B juga memiliki untuk fungsi -fungsi alternative khusus seperti yang terdapat dalam table berikut : Tabel 2.1 Fungsi – fungsi Alternatif port B Port pin PB0 PB1 PB2 PB3 PB4 PB5 PB6 PB7 B. Fungsi Alternatif T0 = timer/counter 0 external counter input T1 = timer/counter 0 external counter input AIN0 = analog comperator positif input AIN1 = Analog comperator negative input SS = SPI slave input MOSI = SPI bus master output/ slave input MISO = SPI bus master input / slave output SCK = SPI bus serial clock Pin 9 Merupakan masukan reset (aktif tinggi), pulsa transisi dari rendah ke tinggi akan me-reset Mikrokontroler ini. C. Pin 10 Merupakan positif sumber tegangan yang diberi symbol VCC. D. Pin 11 Merupakan ground sumber tegangan yang diberi simbol GND. E. Pin 12 dan 13 Ini merupakan masukan ke penguat osilator berpenguat tinggi. Pada Mikrokontroler in memiliki seluruh rangkaian osilator yang diperlukan pada serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Karenanya 18 dan 19 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL 1 dapat juga sebagai input untuk inverting osilator amplifier dan input ke rangkaian internal clock sedangkan XTAL 2 merupakan output dari inverting oscillator amplifier. Pin ini juga sebagai masukan clock eksternal. Suatu untuk mengeksekusi instruksi yang ada di memori. Semakin tinggi nilai kristalnya, maka semakin cepat mikrokontroler tersebut. F. Pin 14 sampai 21 Ini adalah port D yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum port D digunakan. Bit – bit DDRD diisi 0 jika ingin memfungsikan pin – pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin- pin port B juga memiliki untuk fungsi -fungsi alternative khusus seperti yang terdapat pada Tabel 2.2 : port A juga merupakan untuk masukan sinyal analog bagi A/D converter Tabel 2.2 Funsi – fungsi Alternatif port D Port Pin Funsi Alternatif PD1 RDX (UART input line) PD2 TDX (UART output line) PD3 INT0 ( external interrupt 0 input ) PD4 INT1 ( external interrupt 1 input ) PD5 OC1B ( Timer / counter1 output compareB match output) OC1A ( Timer / counter1 output compareA match output) ICP ( Timer / counter1 input capture pin) PD6 PD7 PD8 G. H. I. J. H. OC2 ( Timer / Counter2 output compare match output) Pin 22 sampai 29 Ini adalah port C yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C digunakan. Bit – bit DDRC diisi 0 jika ingin memfungsikan pin – pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7 ) juga memiliki fungsi alternative sebagai oscillator untuk timer / counter 2. Pin 30 Merupakan masukan tegangan untuk ADC. Pin 31 Merupakan ground sumber tegangan yang diberi simbol GND sama dengan pin 11. Pin 32 Adalah AREF yang merupakan masukan referensi bagi A/D converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGDN dan Avcc. Pin 33 sampai 40 Ini adalah port A yang merupakan 8-bit port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit ). Output buffer port A dapat memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit – bit DDRA diisi 0 jika ingin memfungsikan pin – pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin 2.3 Penerima Data Frekuensi Radio [8] Gambar 2.2 Yishi-1020 (Radio Frekuiensi) Modul Low power RF seri YS-1020 didesain untuk sistem pentransmisian data tanpa kabel bagi professional dalam jarak pendek. Ys-1020 mengadopsi IC Chipeon CC1020RF, bekerja pada aliran pita frekuensi, penerima dan pentransmisi yang sudah terintegrasi pada modul. Alat ini langsung dapat dihubungkan dengan prosesor monolithic, pc, perangkat RS485, dan komponen UART dengan RS232, RS-485 dan UART/TTL port level interface. Menghubungkan data secara transparan dan desain untuk menangani temperatur pada banyak aplikasi industri baik ruangan tertutup atau terbuka. 1. Fitur Utama Produk: a. Menggunakan Frekuensi pembawa: 433/450/868Mhz atau pilihan lainnya b. Perangkat penghubung: RS-232/RS485/TTL c. Mendukung banyak saluran komunikasi: 8 saluran, dapat diperluas untuk 16/32 saluran d. Baud-rate di udara: 1200/2400/4800/9600/19200/38400bps, Pengiriman data secara transparan: apa yang telah diterima persis dengan apa yang dikirim, cocok dengan standarisasi atau bukan standarisasi protokol pengguna e. Format penghubung: ketetapan untuk pengguna 8N1/8E1/801, atau disesuaikan dengan format penghubung lainnya f. Pemodulasian: GFSK. Berdasarkan pada modulasi GFSK, tahan terhadap gangguan yang besar dan Bit Error Rate yang rendah g. Half duplex: penggabungan untuk penerima dan pengirim yang menjadi satu didalam satu alat, kemampuan merubah dengan sendirinya untuk menerima dan mengirim selama 10ms Penggunaan daya yang rendah dan fungsi terjaga Batas temperatur : -35 derajat celsius sampai 75 derajat celsius (-31 ~ 167 F) Batas kelembaban: 10% ~ 90% kelembaban relatif tanpa pengembunan Besar hambatan: 50Ω Disahkan dengan EN 300220 dan ARIB STD-T67 Potensiometer jarang digunakan untuk mengendalikan daya tinggi (lebih dari 1 Watt) secara langsung. Potensiometer digunakan untuk menyetel taraf isyarat analog (misalnya pengendali suara pada peranti audio), dan sebagai pengendali masukan untuk sirkuit elektronik. Sebagai contoh, sebuah peredup lampu menggunakan potensiometer untuk menendalikan pensakelaran sebuah triac, jadi secara tidak langsung mengendalikan kecerahan lampu. 2. Daerah pengaplikasian: a. Otomatisasi pembaca meteran b. Sambungan tanpa kabel: POS, PDA c. Tampilan gambar elektronik tanpa kabel, tampilan LED d. Remote Control tanpa kabel, penangkap situasi lingkungan, sistem telemetri e. Sistem pengecekan kehadiran, sistem tataanantian dan posisi keberadaan batu-bara pada penambangan batu-bara Potensiometer yang digunakan sebagai pengendali volume kadang-kadang dilengkapi dengan sakelar yang terintegrasi, sehingga potensiometer membuka sakelar saat penyapu berada pada posisi terendah. h. i. j. k. l. 3. Spesifikasi a. Daya untuk RF: ≤10mW/10dBm b. Arus yang diterima: ≤25mA c. Arus mengirim: ≤40mA d. Arus sleep mode: ˂20µA e. Suplai daya: Tegangan DC 5V atau 3.3V f. Sensitivitas dalam menerima : -115 dBm (@9600bps) -120 dBm (@1200bps) g. Ukuran: 47mm x 26mm x 10mm (tanpa antenna) h. Jangkauan : 1. ≤0.5m (BER=10-3@9600bps, saat antena berada 2 meter diatas permukaan tanah pada area terbuka) 2. ≤0.8m (BER=10-3@1200bps, saat antena berada 2 meter diatas permukaan tanah pada area terbuka) 2.3 Potensiometer Potensiometer adalah resistor tiga terminal dengan sambungan geser yang membentuk pembagi tegangan dapat disetel. Jika hanya dua terminal yang digunakan (salah satu terminal tetap dan terminal geser), potensiometer berperan sebagai resistor variabel atau Rheostat. Potensiometer biasanya digunakan untuk mengendalikan peranti elektronik seperti pengendali suara pada penguat. Potensiometer yang dioperasikan oleh suatu mekanisme dapat digunakan sebagai transduser, misalnya sebagai sensor joystick. Gambar 2.3 Potensiometer Motor servo pada dasarnya adalah motor dc dengan kualifikasi khusus yang sesuai dengan aplikasi “sevosing” didalam teknik control. Dalam kamus Oxfrod istilah “servo” diartikan sebagai “ a mechanism that control a large mechanism “.tidak ada sepisi baku yang disepakati untuk menyatakan bahwa suatu motor dc adalah motor servo. Namun secara umum dapat difinisikaan bahwa motor harus memilki kemampuan yang baik dalam mengatasi perubahan yang cepat dalam posisi dan kecepatan. Motor servo juga dikehendaki handal dalam beroperasi dalam lingkup torsi yang berubah berubah. Berapa tipe motor yang dijual dengan paket rangkaian drivernya telah memiliki rangkaia control kecepatan yang menyatu didalamnya. Putaran motor tidak lagi berdasarkan tegangan supplay ke motor, namun berdasarkan tegangan input khusus yang berfungsi sebagai referensi kecepatan output. Motor servo merupakan motor yang diatur dan dikontrol menggunakan pulsa. Motor standard ini memiliki tiga posisi yaitu posisi 0 derajat, posisi 90 derajat, dan posisi 180 derajat. Poros motor servo biasanya dihubungkan dengan suatu mekanisme sehingga dapat membuat / mengontrol pergerakan roda depan pada sebuah mobil mainan. Pada saat poros pada posisi 0 dearjat, maka roda mobil mainan akan bergerakan kekiri, jika posisi poros pada 90 derajat, maka roda depan mobil maianan akan lurus, sedangkan jika posisi 180 derajat, maka roda depan mobil akan berbelok kekanan. Gambar 3.1 Blok Diagram Pengendali Motor Servo Gambar 2.4 Pemberian Pulsa Untuk Perputaran Motor Servo Karena ada tiga posisi utama seperti yang dijelaskan diatas maka dibuatlah secara khusus mengatur motor srvo tersebut, dengan cara memberikan pulsa digital dengan lebar yang berbeda – beda. Jika diberikan pulsa dengan lebar 1.5ms maka motor servo akan berputar 90 derajat, pulsa dengan 1.75ms akan membuat motor servo menuju 180 derajat, sedangkan pulsa dengan lebar 1.25ms akan membut motor servo bergerak menuju 0 derajat, motor servo tersebut disebut Motor servo standard yang memiliki batas, hal ini menyebabkan poros servo tidak berputar 360 derajat, sedangkan motor servo continous jika diberi puls 1.25ms akan berputar CW dan sedangkan jika diberi 1.75ms maka akan berputar CCW dan juga bila diberi 1,5ms motor servo kan diam tidak bergerak. Pada dasarnya motor servo continous akan berputar 360 derajat. Dalam diagram pengendali closed loop, output dari proses (variable control) secara terus menerus dikendalikan oleh setir. Setir mencuplik output sistem dan mengubah hasil pengukuran ini menjadi dalam bentuk sudut Gambar 3.2 Blok diagram Sistem pengendalian closed loop Dispesifikasi pada gambar3.2 R(s) adalah sinyal masukan , C(s) adalah sinyal keluaran, E(s) adalah sinyal internal dan G(s) dan H(s) adalah Fungsi alih. Untuk sinyal masukan R(S) dapat dirumuskan : Vo = R1.Vcc / Rt R(s) = Vo Gambar 2.5 Motor Servo 3. PERANCANGAN ALAT Perancangan sistem alat Pengendali Motor Servo DC standar jarak jauh dengan berbasis mikrokontroler. Pada Gambar 3.1, akan dijelaskan setiap blok rangkaian, di dalamnya terdapat berbagai macam elemen yaitu Setir, Motor Servo, Display, Sensor, Transmitter–Receiver Dan Mikrokontroler. Gambar 3.3 Motor Servo Pada gambar 3.3 adalah sebauh rangkain dalam motor servo karena motor servo di dalam ya adalah motor DC sehingga dapat ditentukan : ea (t) adalah tegangan armature , yang dianggap sebagai masukan sistem . sehingga dapat di rumus kan sinyal internal G(s) adalah Ea(s) = (Lms + Rm) Ia(s) +Em(s) Ia(s) = Ea(s) – Em(s) / Lms + Rm Karena Fluks diasumsikan kostanta. Sehingga Torsi dapat dirumuskan : T(s) = Kτ. Ιa(s) Persamaan akhir diturunkan dari penjumlahan torka – torka pada amatur motor. Pada gambar momen inersia J meliputi semua inersia yang dihubungkan keporos motor, dan B meliputi gesekan udara dan gesekan bantalan poros dan dirumuskan T(s) = ( Js2 + Bs) θ(s) Penyelesaian persamaan ini untuk sudut poros motor menghasilkan rumus θ(s) = T(s) / Js2 + Bs C(s) = Θ(s) Dimana Sensor posisi adalah Fungsi ahli H(s), resistor dapat mengukur baik tranlasi maupun rotasi, R1 adalah fungsi dari posisi, Persamaan yang didapat diaplikasikan untuk pengukuran posisi lateral atau sudut, dan melalui cara pembagi tegangan Vo = R1 .Vcc / RT Gambar 3.4. Rangkaian Mikrokontroler AVR ATmega8535 Tabel 3.1 Penggunaan Port Mikrokontroller 1 Port PortC.0 Input/Outpu t Output Input / Output Interfac e Seven Segment TX – RX Input Setir e(t) = Vo Dengan e(t) = adalah keluaran sensor .E adalah tegangan dc yang diberikan, dan R1(t) adalah perbandingan dengan perpindahan. Secara normal, resistasi R1 adalah Fungsi linear terhadap perpindahan , karena itu e(t) berbanding langsung dengan perpindahan e(t) = kΘ Θ(t) H(s) = e(t) persamaan gambar 3.2 dapat dirumuskan : C(s) = G(s)R(s) – G(s)C(s)H(s) Sehingga didapat persamaan: C(s) = G(s)R(s) / 1+ G(s)H(s) 3.1 Rangkaian Mikrokontroler Rangkaian mikrokontroler merupakan blok kendali dari alat, karena seluruh proses input dan outputnya dilakukan pada blok rangkaian ini. Untuk lebih jelasnya blok rangkaian lengkap dari mikrokontroler ATM8535. Blok mikrokontroler ini berfungsi sebagai pengaturan kerja alat agar dapat bekerja secara sistematis. Hasil keluaran dari blok setir dikirim ke mikrokontroler untuk diproses, setelah proses, mikrokontroler mengirimkan data ke blok keluaran untuk mengaktifkan blok keluaran tersebut. Pada perancangan alat ini digunakan PortC, PortA, PortD dan PortB. Untuk lebih jelasnya penggunaan Port mikrokontroller terlihat seperti Tabel 3.1 dan Tabel 3.2 Gambar blok rangkaian mokrokontroler ATM8535 dapat diperlihatkan pada Gambar 3.4 PortD. 0– PortD. 1 PortA. 0 Tabel 3.2 Penggunaan Port Mikrokontroller 2 Port PortC. 7 PortD. 0– PortD. 1 PortA. 7 Input/Outp ut Output Output Input Interface Motor Servo TX – RX Photensiom ter 3.2 Rangkaian Transmiter dan Receiver Pada rangkian ini berfungsi untuk mengirim dan menerima data dari hasil pergerakan setir maupun data masukan dari sensor yang membaca pergerakan motor servo. Setelah rangkaian transmitter dan receiver menerima data, kemudian data tersebut diproses oleh rangkaian blok kendali (mikrokontroler). Pada Gambar 3.3 dapat dilihat bentuk rangkaian transmiter dan receiver (RF Yishi 1020) yang dihubungkan dengan rangkaian mikrokontroler.. Rangkaian sensor ini digunakan sebagai pembaca besarnya sudut pergerakan motor servo. Sensor ini akan membaca pada saat motor servo berputar. Sesuai dengan putaran yang dihasilkan oleh potensiometer. Pada rangkaian sensor ini digabungkan dengan ADC internal yang dimilki oleh Mikrokontroller ATM8535. Dengan dasar pembagi tegangan sistem sensor ini menggunakan masukan ADC channel 0 pada PortA. Sehingga rangkaian sensor dapat dirumuskan sebagai berikut. Gambar 3.5 Rangkaian Transmitter dan Receiver 3.3 Rangkaian Display Seven Segment Rangkaian seven segment ini berfungsi untuk menampilkan hasil derajat perputaran motor servo dan perputaran setir. pada PortC.0 Sampai PortC.7 mikrokontroller digunakan sebagai penampil elektronik dengan menggunakan seven-segment. Seven-segment yang digunakan adalah seven-segment Common Anoda. Selain untuk menghemat penggunaan Port pada mikrokontroller, dengan menggunakan IC 4543B. IC jenis ini berfungsi sebagai dekoder data biner menjadi data desimal dan cocok dengan seven-segment CA (common anoda). Sebagai contoh, jika kita hendak membuat program dengan menggunakan seven-segment sebagai output maka yang pertama kita tahu adalah satu Port habis hanya untuk satu seven-segment, hal ini akan menghabiskan Port apabila menggunakan sevensegment lebih dari 2 atau 4 seven segment. Kemudian data juga harus dikonversikan dalam bentuk hexadecimal agar seven-segment menampilkan data yang diinginkan. Konversi data pada seven-segment 3.5 Rangkaian Motor servo Motor servo terhubung pada PortC.0 pada rangkaian mikrokontroler. Motor servo mempunyai tiga masukan yaitu input, Vcc. Ground. Jika mikrokontroller di berikan logika 1 ( high) pada salah satu inputan motor servo maka motor servo tidak berkerja sedangkan jika mikrokontroler diberikan logika 0 (low) maka servo berkerja sesuai fungsi yang dibutuhkan oleh motor servo seperti yang terlihat pada Ganbar 3.4. Gambar 3.8 Rangkaian Motor Servo 3.6 Gambar 3.6 3.4 Rangkaian Seven Segment Rangkaian Sensor Gambar 3.7 Rangkaian Sensor Rangkaian Pengendali (Setir) Rangkaian pengendali digunakan sebagai kendali pergerakan motor servo yang dilakukan secara manual dengan potensiometer yang berupa setir. Pada rangkaian ini potensiometer digabungkan dengan menggunakan ADC internal yang dimilki oleh Mikrokontroller ATM8535 dengan fitur PWM yang juga dimiliki oleh mikrokontroler. Dengan dasar pembagi tegangan sistem control ini menggunakan masukan ADC channel 7 pada PortA. Pada dasarnya potensiometer adalah pembagi tegangan yang bervariasi dan dapat dirumuskan sebagai berikut. Dimana keluaran pada setir (potensiometer) ini di hubungkan ke ADC. Karena mikrokontroler hanya memiliki masukan berupa data-data digital. Analog to digital Converter yang digunakan sudah dibangun pada IC mikrokontroler ATMega8535. ADC adalah sebuah interface yang dapat mengubah tegangan analog menjadi pulsa digital. Pada ADC 8 bit, rentang output yang dihasilkan adalah 2 pangkat 8 = 256. Tentunya ADC 10bit yang dibangun pada mikrokontroler AVR ATMega8535 ini lebih besar lagi yaitu 2 pangkat 10 = 1024. Adapun rumus untuk menentukan hasil konversi ADC adalah sebagai berikut: Konversi_ADC = (vin/vref)*1024 = Dimana : Vin = Tegangan input Vref =TeganganRefernsi (= VCC) Gambar 3.10 memperlihatkan gambar rangkaian pengendali (Setir) Gambar 3.9 Rangkaian Pengendali Motor Servo. 3.7 Perancangan Alur Program Dengan Diagram Pada pembuatan alat pengendali motor servo dengan jarak jauh Untuk itu dibutuhkan program untuk mengendalikan semua proses kerja dari alat. Untuk memudahkan pembuatan program diperlukan flowchart. Flowchart dari pembuatan program alat ini dapat dilihat pada Gambar 3.10. Gambar 3.10 Flowchat pengendali motor servo dc standart Pada gambar 3.11 bagaimana alat pengendali motor servo itu berkerja yaitu: 1.Pada kondisi awal setir dalam kondisi diam. apa bila setir digerakan atau diputar kekiri ataau kekanan . pontensiometer berputar mengikuti setir memberikan data masukan ke mikrokontroler (1) data diproses dikirimkan melalui transmitter (TX) modul 1. 2. penerima (RX) pada modul 2 menerima data dari transmitter (TX) pada modul 1 kemudian data masuk ke mikrokontroler 2 lalu diproses untuk menggerkan motor. setelah motor berputar kekiri atau kekanan yang diikuti oleh piringan dan potensiometer setelah itu pergerakan dari potensiometer memberikan data ke mikrokontroler 2 untuk diproses lalu dikirimkan oleh pengirim (TX) pada modul 2 3.Setalah data yang dikirmkan dari transmitter (TX) modul 2 diterima oleh penerima (RX) pada modul 1 lalu data diproses oleh mikrokontroler (1) yang dikeluarkan dalam bentuk display dari hasil perputaran piringan yang berupa angka. 3.9 Rangkaian Catu Daya regulator 7805 T = 1/2f ; f adalah frekuensi tegangan PLN Sehingga : Arc sin atau sin-1 ( Vmin / Vrms ) = tx Tx = tx / 90o x (T / 2) Gambar 3.11 Catu Daya dengan Regulator LM 7805 Gambar dari rangkaian catu daya dapat dilihat pada Gambar 3.10, Rangkaian Catu Daya ini berfungsi sebagai penyuplai tegangan DC sebesar 5V. Tegangan ini digunakan untuk alat pengendali motor servo karena pada setiap blok rangkaian membutuhkan tegangan DC 5V. Pada Gambar 3.10 arus yang keluar pada IC regulator sebesar 1 Ampere dan tegangan yang keluar sebesar 5V. Rangkaian catu daya ini menggunakan 2 buah dioda silicon. Sehingga tegangan minimal masukan Ic legulaor adalah sebagai berikut: Vmin = Tegangan minimal menurut data sheet Vmin = tegangan minimal pada inputan 7805 + tegangan dalam diode Sedangkan untuk Vpeak adalah Maka waktu yang dibutuhkan kapasitor untuk mengosongkan muatan sampai dengan 7,5 volt adalah selama : t = T / 2 + Tx Sehingga dapat dicari : Vmin = Vp e –t/RC ; R pada output = V/I Jadi kapasitor yang harus digunakan untuk rangkaian catu daya diatas agar mendapat hasil yang lebih bagus. 4. ANALISA DAN PENGUJIAN ALAT Dalam pembuatan alat ini membutuhkan suatu pengujian, dimana pada pengujian tersebut akan memperhatikan suatu akurasi data yang cukup akurat untuk dijadikan pedoman perhitungan. Vrms = Voutput Trafo= 12Volt Sehingga : Vp = Vrms √2 - Vd Dan tegangan ripple-nya didapat sebagai berikut : Vrippel = Vp - Vmin Sehingga dapat digambarkan gelombang keluaran setelah melewati kapasitor sebagai berikut : 4.1 Pengujian Dilakukan Pada Berapa Blok Diagram Agar lebih memudahkan pengujiannya maka akan dibahas masing-masing blok. Adapun blok-blok yang akan diuji adalah : Pengujian dan Pengukuran Rangkaian Catu Daya Pengujian dan Pengukuran Rangkaian Sensor Pengujian Bentuk Gelombang Reset Pengujian dan Analisa Motor Servo Pengujian dan pengukuran pada Setir Untuk pengambilan data dilakukan dalam beberapa tahap yaitu pengamatan tegangan, pengamatan arus, dan pengamatan logika pada output IC digital dan IC programnya. Sumber listrik selalu dalam keadaan ON. Alat ukur yang dipakai : Gambar 3.12 Gelombang Karena menggunakan full wave rectifier, maka dihasilakan dua gelombang dalam satu priode dengan nilai T Jadi nilai : Osiloskop Multimeter AC dan DC Tachometer 4.2 Pengujian dan Pengukuran Rangkaian Catu Daya Pengujian dan Pengukuran Rangkaian Catu daya bertujuan untuk mengetahui besarnya tegangan pada Catu daya. 1. Alat yang digunakan dalam pengukuran Multimeter. 2. Langkah Pengukuran 1. Multimeter difungsikan sebagai pengukur tegangan 2. Menghubungkan multimeter seperti 3. Mencatat hasil pengukuran yang diperoleh. IN4002 78L05 1 9V V IN V OUT GND 1000uf/16V Pada saat listrik on tegangan pada input adalah 12 Volt dan pada output 4,96 Volt. Dari analisa didapat bahwa regulator 7805 mampu menurunkan tegangan dari 12 Volt ke 4,96 Volt DC dengan stabil. VCC 3 2 1000uf/16v Dari percobaan di atas dapat dianalisa yaitu : 100 nF 1K 9V tegangan yang dibutuhkan 4,5 sampai 6 lebih dari maka kemungkinan motor akan rusak pada tabel 4.1. Melihat hasil pengukuran dapat ditarik kesimpulan bahwa tegangan keluaran catu daya untuk rangkaian minimum mikrokontroler dan motor servo sudah memadai dan cukup stabil yaitu bekisar pada 4,96 VDC, meskipun pengukuran dilakukan berulang kali, Menghubungkan alat ukur pada gambar 4.1. 3 Analisa LED IN4002 Gambar 4.1 : Langkah Pengukuran Rangkaian Catu Daya 4.3 Pengujian dan Pengukuran Rangkaian Sensor 1 Hasil pengujian: Tabel 4.1 Hasil pengukuran Rangkaian Catu Daya 5v Pengukuran Tegangan output 1 4,97 v (DC) 2 4,95 v (DC) 3 4,95 v (DC) 4 4,97 v (DC) 5 4,96 v (DC) Rata-rata 4,96 v (DC) Seperti yang telah kita ketahui, catu daya berfungsi sebagai penyedia sumber tegangan bagi seluruh sistem rangkaian yang di pakai. Pada perancangan ini menggunakan 1 buah catu daya yang di butuhkan, yaitu tegangan keluaran 5 v untuk rangkaian minimum mikrokontroler, motor servo dan prangkat lainya. Pengujian dan analisa pada rangkaian cata daya bertujuan untuk memastikan kestabilan daya yang di sediakan oleh catu daya. Alat yang digunakan dalam pengukuran ini menggunakan AVO Meter. Tegangan keluaran rangkaian catu daya yang digunakan untuk sistem minimum mikrokontroler dan motor servo ialah 5V DC, sehingga hasil pengukuran haruslah sama atau setidaknya mendekati, karena jika tidak kemungkinan besar alat tidak dapat bekerja apalagi jika tegangan output melebihi 5V DC maka kemungkinan besar mengakibatkan kerusakan pada mikrokontroler yang digunakan. Pada motor servo 2 3 Tujuan Tujuan Pengujian dan Pengukuran Rangkaian Sensor adalah untuk mengetahui besarnya tegangan dalam motor berputar . Alat yang digunakan Multimeter Langkah Pengukuran 1. Menghubungkan alat ukur rangkaian seperti di bawah ini : pada Gambar 4.2 Langkah pengukuran Rangkaian Sensor 3. Dengan memutar setir untuk menggerakkan motor servo yang akan dibaca derajatnya oleh sensor pontensiometer, kemudian lakukan pengukuran pada tegangan keluaran pada potensiometer Data hasil pengukuran dapat dilihat pada Tabel 4.2. dan tabel 4.3. Tabel 4.2 Hasil Pengukuran Rangkaian Sensor pada putaran motor servo 00 sampai 900 N0 Sudut putaran motor servo Dalam derajat Tabel 4.3 Hasil Pengukuran Rangkaian Sensor pada putaran motor servo 00 sampai -900 Sudut putaran motor Tegangan Output servo No potensiometer derajat 1 0 1,20 Tegangan Output Potensiometer (volt) 2 -10 1,16v 3 -20 0,94V 1 0 1,20 V 4 -30 0,79V 2 10 1,29 V 5 -40 0,68V 3 20 1,37 V 4 30 1.51 V 6 -50 0,53V 5 40 1,65 V 7 -60 0,40V 6 50 1,80 V 8 -70 0,30V 7 60 1,85 V 8 70 2,03 V 9 -80 0,18V 9 80 2,14 V 10 -90 0V 10 90 2,25 V Sehingga dapat digambarkan grafik dari hasil table 4.2 Sehingga dapat digambarkan grafik dari hasil table 4.3 Gambar 4.4 Grafik Pengukuran Rangkaian Sensor pada putaran motor servo kekiri Gambar 4.3 Grafik Pengukuran Rangkaian Sensor pada putaran motor servo kekanan 4 Analisa Dari hasil percobaan di atas dapat dianalisa beberapa hal yaitu : Pada pengambilan data rangkaian sensor putaran motor servo dari 00 sampai dengan 900, didapat kenaikan tegangan pada output potensiometer sebesar ± 0.15 volt per sepuluh derajat. Pada pengambilan data rangkaian sensor putaran motor servo dari 00 sampai dengan -900, didapat penurunan tegangan pada output potensiometer sebesar ± 0.15 volt per sepuluh derajat 4.4 Pengujian Bentuk Gelombang Reset. 3 Tujuan : Untuk Mengamati atau mengetahui lamanya waktu reset yang dibutuhkan oleh mikrokontroler. - Osiloskop Langkah pengukuran 1. Menghubungkan alat ukur rangkaian seperti di bawah ini : pada Jalan percobaan : Kabel probe osiloskop dihubungkan diantara kapasitor dan resistor pada rangkaian reset mikrokontroler. Gambar 4.7 Langkah pengukuran Rangkaian Motor Servo 2. Gambar 4.5 : Pengujian Bentuk Gelombang Reset Hasil pengamatan : Dari hasil pengamatan didapat bahwa lamanya waktu reset pada mikrokontroler adalah 0,0940 s. Gambar 4.6. Hasil pengujian bentuk gelombang reset Analisa : Dari hasil pengamatan dapat diambil kesimpulan bahwa pada saat power dihidupkan maka mikrokontroler akan mendapat reset dengan waktu selama 0,0940 s. 4.5 Pengujian dan Analisa Rangkaian Motor Servo 1 Tujuan Tujuan Pengujian dan Analisa Rangkaian Motor Servo adalah untuk mengetahui besarnya tegangan dalam kondisi Mikrokontroler mengirimkan data pada motor servo. 2 Alat yang digunakan Dengan melakukan pengujian dan analisa, kemudian melakukan pengukuran tegangan dalam kondisi mikrokontroler mengirimkan data motor servo dan hasil pengukuran kecepatan dalam perputaran rpm dengan kondisi pemberian pulsa low 18 ms. Terlihat pada table 4.4 Tabel 4.4 Hasil Pengukuran Rangkaian Motor Servo NO Tegangan Vcc Tegangan Output (Vo) 1 5V 0.24V 2 5V 0,27V 3 5V 0.27V 4 5V 0.30V 5 5V 0.38V 4 Lebar pulsa low 18 ms 18 ms 18 ms 18 ms 18 ms Lebar pulsa high 1 ms 1,3 ms 1,4 ms 1,5 ms 2 ms rpm 49,5 43,7 0 45 48,5 Analisa Dari hasil percobaan di atas dapat dianalisa beberapa hal yaitu : 1) Bahwa pulsa yang diterima oleh motor servo sesuai yang terprogram dalam mikrokontroler. 2) Dengan melakukan analisa rangkaian motor servo menggunakan osciloscop terlihat bahwa pulsa yang diterima oleh motor servo terlihat seperti dibawah ini Tabel 4.6 Hasil Pengukuran Rangkaian setir dan sudut pada setir dengan sudut motor -900 sampai 00 NO Gambar 4.9 Hasil pengujian data motor servo 3) Setelah dilakukan pengoperasian ternyata motor servo bekerja sesuai dengan yang diharapkan. 4) Motor servo akan berkerja bila diberi pulsa 5) Dari hasil gambar grafik 4.4 pada saat pulsa 1.4ms motor servo akan berhenti dan pada saat diberi lebar pulsa high 1 ms motor servo akan bergerak semakin cepat dan apabila diberi lebar pulsa 1.3ms akan berputar semakin lambat. 4.6 Pengujian dan Pengukuran Pada Setir 1 2 3 1 2 3 4 5 6 7 8 9 10 Sudut Putaran Motor (dalam derajat) -90 -80 -70 -60 -50 -40 -30 -20 -10 0 Sudut putaran Stir (dalam derajat) -90 -60 -50 0 10 12 14 20 30 33 Tegangan Output Potensiometer (volt) 0 0.50 0.57 0.65 0.74 0.81 0.88 1.0 1.13 1.17 Sehingga dapat digambarkan grafik dari hasil tabel 4.6 ; Tujuan Tujuan Pengujian dan Pengukuran Rangkaian Sensor adalah untuk mengetahui besarnya tegangan dalam motor berputar . Alat yang digunakan Multimeter Langkah Pengukuran 1. Menghubungkan alat ukur rangkaian seperti di bawah ini : pada Gambar 4.11 Grafik dari pengukuran rangkaian setir untuk putaran kekiri Gambar 4.10 Langkah pengukuran Rangkaian Setir 2. Dengan memutar setir untuk menggerakkan motor servo yang akan dibaca derajatnya, kemudian lakukan pengukuran pada tegangan keluaran pada potensiometer. Data hasil pengukuran ada pada Tabel 4.6 Tabel 4.7 Hasil Pengukuran Rangkaian setir dan sudut pada setir dengan sudut motor 00 sampai 900 NO 1 2 3 4 5 6 7 8 9 10 Sudut Putaran Motor (dalam derajat) 0 10 20 30 40 50 60 70 80 90 Sudut putaran Stir (dalam derajat) 33 35 45 50 65 80 90 - Tegangan Output Potensiometer (volt) 1,17 1,28 1,36 1,40 1,50 1,65 1,80 1,98 2,10 2,21 Sehingga dapat digambarkan grafik dari hasil tabel 4.7 Gambar 4.12 Grafik dari pengukuran rangkaian setir kekanan Analisa Pada analisa diatas didapat yang berbeda sudut antara setir dengan sudut motor servo, dikarenakan potensiometer tahanannya selalu berubah bila terkena panas bila kita tidak mengubahnya. Semakin besar sudut maka tegangannya makin bertambah dan semakin kecil sudut maka semakin kecil tegangan. 5. Kesimpulan Berdasarkan pengujian dan analisa yang dilakukan, dapat disimpulkan bahwa perancangan dan pembuatan alat pengendali motor servo DC standart berbasis mikrokontroler AVR ATMega8535 berfungsi dengan baik, namun masih terdapat beberapa kekurangan yang diantaranya ketepatan perputaran antara setir dengan motor. Untuk jarak maksimal reciver menerima sinyal dari transmitter kurang lebih 90 meter, dikarena sinyal semakin jauh semakin lemah dan mungkin karena tidak singkronnya pada alat. DAFTAR PUSTAKA 1. Lingga Wardhana, Belajar Sendiri Mikrokontroler AVR seri ATM8535 (simulasi, hardware, dan aplikasi ),Edisi Pertama, Andi Yogyakarta, 2006 2. Endra Pitowarno, ROBOTIKA Desain , Kontrol, dan Kecerdasan buatan, Edisi pertama, Andi Yogyakarta, 2006. 3. Moh. Ibnu Malik, ST, Membuat Robot dengan Mikrokontroller PIC 16f84, Edisi Pertama , Gava Media, Yokyakarta, 2006. 4. Malavino Hanapi Gunawan , Prinsip – prinsip Elektronika, Erlangga 5. Wasito S, Vademakum Elektronik, Andi Yogya, Yogyakarta, 1992. 6. Wasito S, Data sheet 1 Data IC liner, TTL dan CMOS, ( kumpulan data komponen elektronik), Alex Media Komputindo. Jakarta,1992. 7. Charles L. Philips dan Royce D, Harbor, Dasar – Dasar Sistem Kontrol 1996 Prentice Hall 8. WWW.Societyofrobots.COM 9. www.Yishi.net.cn 10. www.alldatasheet.com 11. www.prasimax.com