BAB II - digilib POLBAN
advertisement

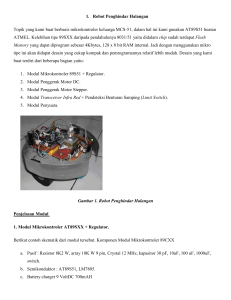
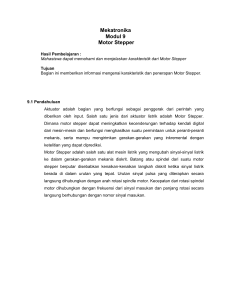
LANDASAN TEORI BAB II LANDASAN TEORI 2.1 Rangkaian Pembangkit Pulsa (Clock) Rangkaian ini berhubuhan dengan rangkaian Multivibrator. 2.1.1 Multivibrator Multivibrator adalah suatu rangkaian generatif dengan dua buah piranti aktif yang dirancang sedemikian sehingga salah satu piranti bersifat penghantar pada saat piranti lain terpancung. Multivibrator dapat menyimpan bilangan biner, mencacah pulsa, menyerempakan operasi-operasi aritmatika serta melaksanakan fungsi-fungsi lainya dalam sistem digital. Multivibrator digolongkan menjadi tiga jenis yaitu: 2.1.1.1 Multivibrator Bistabil Flip-flop adalah nama lain dari Multivibrator bistabil, yakni Multivibrator yang keluarannya adalah suatu tegangan rendah atau tinggi (0 atau 1). Keluaran ini tetap rendah atau tinggi, untuk mengubah rangkaian yang bersangkutan harus di driver oleh suatu masukan yang disebut pemicu (trigger). Sampai datangnya pemicu, tegangan keluaran tetap rendah atau tinggi untuk waktu selang terbatas. Rangkaian dasar dari Multivibrator pada gambar 2.1 gandengan silang dari masing-masing kolektor ke basis pada sisi yang berlawanan. Gandengan ini menghasilkan umpan balik positif, oleh sebab itu jika Q1 jenuh, tegangan kolektor Q1 yang rendah akan mendorong Q2 ke keadaan terpancung. Demikian juga jika pada suatu saat kita dapat menjenuhkan Q2 maka keadaan ini akan mendorong Q1 terpancung. Maka terdapat dua keadaan kerja yang stabil. Q1dan Q2 terpancung atau Q1 terpancung dan Q2 jenuh. Untuk mengendalikan keadaan flip-flop, harus ditambahkan masukan-masukan pemicu jika suatu tegangan diterapkan pada masukan S (set), maka Q1 jenuh, hal ini mendorong Q2 ke keadaan MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 5 LANDASAN TEORI terpancung, pemicu pada masukan S dapat dihilangkan. Demikian pula suatu keadan tinggi dapat diterapkan pada masukan R (reset) hal ini menjenuhkan Q2 dan mendorong Q1 ke keadaan terpancung Gambar 2.1 Rangkaian Dasar Multivibrator Bistabil 2.1.1.2 Multivibrator Monostabil Multivibrator monostabil akan mengalami stabil pada salah satu keadaan namun tidak stabil pada keadaan yang lainnya. Bila dipicu rangkaian berpindah dari keadaan stabil ke keadaan tidak stabil. Rangkain ini menetap pada keadaan tak stabil ini selama sesaat dan selanjutnya kembali keadaan semula. Rangkaian dasar pada gambar 2.2. memperlihatkan satu cara untuk menyusun sebuah Multivibrator monostabil. Keadaan stabil adalah Q1 mati atau Q2 hidup, yang berkaitan dengan keluaran rendah pada saat suatu pinggiran pulsa lonceng positif tiba, pinggiran ini didefinisikan oleh kapasitor guna mendapatkan suatu impuls positif yang sempit pada basis Q1. Impuls ini menghidupkan Q1 dan menurunkan tegangan kolektor Q1, penurunan tegangan ini digandengkan ke basis Q2, sehingga mematikan transistor ini. Namun kondisi Q1 hidup dan kondisi Q2 mati hanya berlaku sementara, karena dengan berubahnya muatan kapasitor, pra tegangan muncul pada basis Q2 akan hilang setelah selang waktu tertentu yang ditentukan oleh tetapan waktu Rc pada rangkaian basis Q2, Q2 kembali hidup dan Q1 mati. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 6 LANDASAN TEORI Gambar 2.2 Rangkaian Dasar Multivibrator Monostabil Setiap kali suatu pinggiran pulsa lonceng positif tiba pada basis Q, tegangan keluaran Y berpindah dari rendah ke tinggi selama sesaat dan selanjutnya kembali ke keadaan rendah. Terdapat sebuah pulsa segiempat bagi setiap pinggiran pulsa lonceng positif. T (time periode) = 1,1 x RA x C………..…..(2.1) dengan RA = resistor (Ω), C = kapasitor (F) 2.3.1.3 Multivibrator Astabil Multivibrator astabil mempunyai dua keadaan, namun tidak stabil pada salah satu keadaan diantaranya dengan perkataan lain. Multivibrator akan berada pada salah satu keadaanya selama sesaat dan kemudian berpindah ke keadaan yang lain. Disini Multivibrator tetap untuk sesaat sebelum kembali ke keadaan semula, perpindahan pulang pergi berkesinambungan ini menghasilkan suatu gelombang segiempat dengan waktu bangkit yang sangat cepat. Karena tidak dibutuhkan sinyal masukan untuk memperoleh suatu keluaran. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 7 LANDASAN TEORI Gambar 2.3 Rangkaian Dasar Multivibrator Astabil Kerja rangkaian dasar Multivibrator astabil seperti pada flip flop RS salah satu transistor jenuh pada saat yang lainnya terpancung, perpindahan dari suatu keadaan ke keadaan yang lainnya akibat adanya pandangan kapasitor, maka keadaan tersebut tidak stabil dengan begitu kapasitor akan mengisi dan mengosongkan muatan selama sesaat dan mengakibatkan salah satu transistor menghantar, kemudian transistor lainnya. Pengatur waktu NE 555 adalah sebuah IC dengan berbagai fungsi yang berlainan, termasuk operasi astabil. Rangkaian ini bekerja bebas pada frekuensi yang ditentukan oleh dua buah resistor dan 1 buah kapasitor. Tm (mark time) = 0,7 x (RA+RB) x C…..(2.2) Ts (space time) = 0,7 x RB x C…………(2.3) dengan Tm = waktu aktif (detik) Ts = waktu mati (detik) RA, RB = resistor (Ω), C = kapasitor (F) Gambar 2.4 Multivibrator Astabil pada IC NE 555 MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 8 LANDASAN TEORI 2.2 Shift Register (IC 74194) Register geser (shift register) merupakan salah satu piranti untuk banyak digunakan dalam sistem digital. Register dibentuk dari beberapa flip-flop yang disusun sedemikian rupa. Jumlah flip-flop yang digunaka disesuaikan dengan jumlah moulus yang dibutuhkan. Jadi banyak flip-flop menentukan jumlah bit data. Satu bit data sama dengan 1 kata atau karakter, register geser berfungsi untuk menyimpan data secara digital yang diproses (memory characteristic) atau memory sementara. 2.2.1 Universal Shift Register Register geser universal 74194 adalah register 4 bit. Register ini mempunyai sepuluh masukan, yaitu 4 data parallel (A, B, C, D), masukan seri (geser kanan dan geser kiri), clock clear, dan dua control mode (S0 dan S1), dan mempunyai keluaran (A, B, C, D), keluaran ini dihubungakn pada keadaan normal (Q) dari masing-masing FF dalam IC tersebut. Masukan-masukan pada register 74194 terdapat empat masukan di bagian atas merupakan masukan beban parallel (A, B, C, D). Dua masukan berikutnya adalah untuk memasukan data kedalan register secara serial (setiap waktu satu bit). Begitu register terebut digeser ke kanan maka serial geser ke kanan (DSR) memasukan bit-bit kedalam posisi A (QA). Begitu register digeser ke kiri, masukan serial geser ke kiri (DSL) masukan bit-bit kedalam posisi D (QD). Pada pergeseran high dan low dari clock, masukan clock (CK) memacu empat flip-flop. Bila clear (CLR) aktif low (trigger positif), maka masukan mereset masing-masing flip-flop menjadi 0. Control mode memerintahkan register melalui register penggerbangan untuk menggeser ke kanan, menggeser ke kiri, membebani dengan paralel, atau tetap. IC TTL 74194 mempunyai suatu hubungan catu daya +5 volt dan ground. Seperti biasanya, hubungan catu daya tidak ditunjukan pada simbol logika. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 9 LANDASAN TEORI Gambar 2.5 Shift Register 2.3 Flip fliop Flip-flop mereupakan rangkaian digital yang digunakan untuk menyimpan satu bit secara semi permanen sampai ada suatu perintah untuk menghapus atau mengganti isi dari bit yang disimpan. Prinsip dasar kerja dari flip-flop adalah suatu komponen elektronika dasar seperti transistor, resistor dan dioda yang di rangkai menjadi satu gerbang logika yang dapat bekerja secara sekuensial. `2.3.1 J-K Flip Flop Flip-flop J-K merupakan rangkaian flip-flop yang ideal digunakan sebagai rangkaian pencacah yang mencacah banyaknya pinggiran positif atau negatif pulsa clock yang men-Drivere masukan clock-nya. Simbol dari flipflop ini terlihat seperti pada gambar 2.6 J K SET CLR Q Q Gambar 2.6 Simbol jk flip-flop Salah satu cara untuk membangun flip-flop J-K adalah seperti pada gambar 2.7. J dan K disebut masukan pengendali karena keduanya menentukan apa yang dilakukan oleh flip-flop pada saat diberikan suatu pulsa clock positif. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 10 LANDASAN TEORI J S SET Q CLK R CLR Q K Gambar 2.7 Salah satu cara membangun Flip-flop J-K. Pada saat J dan K adalah rendah, kedua gerbang AND tertutup sehingga pulsa clock tidak memberikan dampak. Kemungkinan pertama adalah entry awal pada tabel 2.1. Seperti terlihat pada tabel itu, pada saat J dan K keduanya berlogic 0, Q tetap pada nilai terakhirnya. Pada saat J rendah dan K tinggi, gerbang atas tertutup, maka tidak terdapat kemungkinan untuk mengeset flip-flop. Satu-satunya kemungkinan adalah reset. Pada saat Q-nya tinggi, gerbang bawah melewatkan suatu pemicu reset segera setelah pinggiran pulsa clock positif berikutnya tiba. Hal ini mendorong Q menjadi rendah ( entry kedua pada Tabel 2.1 ). Oleh karena itu, J=0 dan K=1 berarti bahwa pinggiran pulsa clock positif berikutnya akan mereset flip-flop ( kecuali jika Q memang telah reset ). Pada saat J tinggi dan K rendah, gerbang bawah tertutup, maka tidak terdapat kemungkinan untuk mereset flip-flop. Namun kita dapat mengeset flip-flop dengan cara berikut. Pada saat Q rendah, tinggi, membuat gerbang atas melewatkan suatu pemicu set pada saat pinggiran pulsa clock positif berikutnya tiba. Hal ini menDrivere Q ke keadaan tinggi ( entry ketiga pada Tabel 2.1 ). Pada saat J dan K keduanya tinggi, kita dapat mengeset atau mereset flip-flop. Jika Q-nya tinggi, gerbang bawah melewatkan suatu pemicu resetpada saat pinggiran pulsa clock positif berikutnya tiba. Sebaliknya, jika Q-nya rendah, gerbang atas melewatkan suatu pemicu set pada saat pinggiran pulsa clock positif berikutnya tiba. Dalam kedua hal diatas, Q berubah menjadi komplemen keadaan terakhirnya. Oleh karena itu, J=1 dan K-1 berarti bahwa flip-flop akan toggle (berpindah ke keadaan sebaliknya/ lawannya) pada saat pulsa clock positif berikutnya tiba. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 11 LANDASAN TEORI Tabel 2.1Tabel kebenaran Flip-flop J-K. J K CLK Q 0 0 ↑ Keadaan terakhir (Qo) 1 0 ↑ 0 0 1 ↑ 1 1 1 ↑ Toggle ( ) 2.4 Saklar 2.4.1 Saklar Elektronik 2.4.1.1 Transistor Transistor adalah device semikonduktor yang berfungsi sebagai penguat, stabilisasi tegangan, switching, dll. Pada umumnya, transistor memiliki 3 terminal (Collector, Base, Emitter). Tegangan atau arus yang dipasang disatu terminalnya mengatur arus yang lebih besar yang melalui 2 terminal lainnya. Transistor merupakan komponen yang sangat penting dalam dunia elektronik modern. Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat). Rangkaian analog meliputi pengeras suara, sumber listrik stabil, dan penguat sinyal radio. Dalam rangkaianrangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi. Beberapa transistor juga dapat dirangkai sedemikian rupa sehingga berfungsi sebagai logic gate, memori, dan komponen-komponen lainnya. 2.4.1.1.1 Cara Kerja Transistor Dari banyak tipe-tipe transistor modern, pada awalnya ada dua tipe dasar transistor, bipolar junction transistor (BJT atau transistor bipolar) dan field-effect transistor (FET), yang masingmasing bekerja secara berbeda. Transistor bipolar dinamakan demikian karena kanal konduksi utamanya menggunakan dua polaritas pembawa muatan: elektron dan lubang, untuk membawa arus listrik. Dalam BJT, arus listrik utama harus melewati satu daerah/lapisan pembatas dinamakan depletion zone, dan ketebalan MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 12 LANDASAN TEORI lapisan ini dapat diatur dengan kecepatan tinggi dengan tujuan untuk unipolar) hanya menggunakan satu jenis pembawa muatan (elektron atau hole, tergantung dari tipe FET). Dalam FET, arus listrik utama mengalir dalam satu kanal konduksi sempit dengan depletion zone di kedua sisinya (dibandingkan dengan transistor bipolar dimana daerah Basis memotong arah arus listrik utama). Dan ketebalan dari daerah perbatasan ini dapat dirubah dengan perubahan tegangan yang mengatur aliran arus utama tersebut. FET (juga dinamakan transistor diberikan, untuk mengubah ketebalan kanal konduksi tersebut. 2.4.1.1.2 Arus pada transistor Telah disinggung juga sedikit tentang arus bias yang memungkinkan elektron dan hole berdifusi antara kolektor dan emitor menerjang lapisan base yang tipis itu. Sebagai rangkuman, prinsip kerja transistor adalah arus bias base-emiter yang kecil mengatur besar arus kolektor-emiter. Bagian penting berikutnya adalah bagaimana caranya memberi arus bias yang tepat sehingga transistor dapat bekerja optimal. Ada tiga cara yang umum untuk memberi arus bias pada transistor, yaitu rangkaian CE (Common Emitter), CC (Common Collector) dan CB (Common Base). Namun saat ini akan lebih detail dijelaskan bias transistor rangkaian CE. Dengan menganalisa rangkaian CE akan dapat diketahui beberapa parameter penting dan berguna terutama untuk memilih transistor yang tepat untuk aplikasi tertentu. Tentu untuk aplikasi pengolahan sinyal frekuensi audio semestinya tidak menggunakan transistor power, misalnya. 2.4.1.1.2.1 Arus Emiter Dari hukum Kirchhoff diketahui bahwa jumlah arus yang masuk kesatu titik akan sama jumlahnya dengan arus yang keluar. Jika teorema tersebut diaplikasikan pada transistor, maka hukum itu menjelaskan hubungan : MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 13 LANDASAN TEORI IE = IC + IB ........(1) Gambar 2.8 arus emiter Persamanaan (1) tersebut mengatakan arus emiter IE adalah jumlah dari arus kolektor IC dengan arus base IB. Karena arus IB sangat kecil sekali atau disebutkan IB << IC, maka dapat di nyatakan : IE = IC ..........(2) Alpha (α) Pada tabel data transistor (databook) sering dijumpai spesikikasi α dc (alpha dc) yang tidak lain adalah : α dc = IC/IE ..............(3) Defenisinya adalah perbandingan arus kolektor terhadap arus emitor. Beta (β) Beta didefenisikan sebagai besar perbandingan antara arus kolektor dengan arus base. β = IC/IB ............. (4) Dengan kata lain, β adalah parameter yang menunjukkan kemampuan penguatan arus (current gain) dari suatu transistor. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 14 LANDASAN TEORI 2.4.1.1.2.2 Common Emitter (CE) Rangkaian CE adalah rangkain yang paling sering digunakan untuk berbagai aplikasi yang mengunakan transistor. Dinamakan rangkaian CE, sebab titik ground atau titik tegangan 0 volt dihubungkan pada titik emiter. Gambar 2.9 rangkaian CE Sekilas Tentang Notasi, ada beberapa notasi yang sering digunakan untuk mununjukkan besar tegangan pada suatu titik maupun antar titik. Notasi dengan 1 subscript adalah untuk menunjukkan besar tegangan pada satu titik, misalnya VC = tegangan kolektor, VB = tegangan base dan VE = tegangan emiter. Ada juga notasi dengan 2 subscript yang dipakai untuk menunjukkan besar tegangan antar 2 titik, yang disebut juga dengan tegangan jepit. Diantaranya adalah : VCE = tegangan jepit kolektor- emitor VBE = tegangan jepit base - emitor VCB = tegangan jepit kolektor - base Notasi seperti VBB, VCC, VEE berturut-turut adalah besar sumber tegangan yang masuk ke titik base, kolektor dan emitor. Kurva Base Hubungan antara IB dan VBE tentu saja akan berupa kurva dioda. Karena memang telah diketahui bahwa junction base-emitor tidak MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 15 LANDASAN TEORI lain adalah sebuah dioda. Jika hukum Ohm diterapkan pada loop base diketahui adalah : IB = (VBB - VBE) / RB ......... (5) VBE adalah tegangan jepit dioda junction base-emitor. Arus hanya akan mengalir jika tegangan antara base-emitor lebih besar dari VBE. Sehingga arus IB mulai aktif mengalir pada saat nilai VBE tertentu. Gambar 2.10 kurva IB -VBE Besar VBE umumnya tercantum di dalam databook. Tetapi untuk penyerdehanaan umumnya diketahui VBE = 0.7 volt untuk transistor silikon dan VBE = 0.3 volt untuk transistor germanium. Nilai ideal VBE = 0 volt. Kurva Kolektor Sekarang sudah diketahui konsep arus base dan arus kolektor. Satu hal lain yang menarik adalah bagaimana hubungan antara arus base IB, arus kolektor IC dan tegangan kolektor-emiter VCE. Dengan mengunakan rangkaian-01, tegangan VBB dan VCC dapat diatur untuk memperoleh plot garis-garis kurva kolektor. Pada gambar berikut telah diplot beberapa kurva kolektor arus IC terhadap VCE dimana arus IB dibuat konstan. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 16 LANDASAN TEORI Gambar 2.11 kurva kolektor Dari kurva ini terlihat ada beberapa region yang menunjukkan daerah kerja transistor. Pertama adalah daerah saturasi, lalu daerah cut-off, kemudian daerah aktif dan seterusnya daerah breakdown. Daerah Aktif Daerah kerja transistor yang normal adalah pada daerah aktif, dimana arus IC konstans terhadap berapapun nilai VCE. Dari kurva ini diperlihatkan bahwa arus IC hanya tergantung dari besar arus IB. Daerah kerja ini biasa juga disebut daerah linear (linear region). Jika hukum Kirchhoff mengenai tegangan dan arus diterapkan pada loop kolektor (rangkaian CE), maka dapat diperoleh hubungan : VCE = VCC - ICRC .............. (6) Dapat dihitung dissipasi daya transistor adalah : PD = VCE.IC ............... (7) Rumus ini mengatakan jumlah dissipasi daya transistor adalah tegangan kolektor-emitor dikali jumlah arus yang melewatinya. Dissipasi daya ini berupa panas yang menyebabkan naiknya MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 17 LANDASAN TEORI temperatur transistor. Umumnya untuk transistor power sangat menunjukkan temperatur kerja maksimum yang diperbolehkan agar transistor masih bekerja normal. Sebab jika transistor bekerja melebihi kapasitas daya PDmax, maka transistor dapat rusak atau terbakar. Daerah Saturasi perlu untuk mengetahui spesifikasi PDmax. Spesifikasi ini Daerah saturasi adalah mulai dari VCE = 0 volt sampai kirakira 0.7 volt (transistor silikon), yaitu akibat dari efek dioda kolektor-base yang mana tegangan VCE belum mencukupi untuk dapat menyebabkan aliran elektron. Daerah Cut-Off Jika kemudian tegangan VCC dinaikkan perlahan-lahan, sampai tegangan VCE tertentu tiba-tiba arus IC mulai konstan. Pada saat perubahan ini, daerah kerja transistor berada pada daerah cut-off yaitu dari keadaan saturasi (OFF) lalu menjadi aktif (ON). Perubahan ini dipakai pada system digital yang hanya mengenal angka biner 1 dan 0 yang tidak lain dapat direpresentasikan oleh status transistor OFF dan ON. Gambar 2.12 : rangkaian Driver LED MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 18 LANDASAN TEORI Misalkan pada rangkaian Driver LED di atas, transistor yang oleh sebuah gerbang logika (logic gate) dengan arus output high = 400 uA dan diketahui tegangan forward LED, VLED = 2.4 volt. Lalu pertanyaannya adalah, berapakah seharusnya resistansi RL yang dipakai. IC = β IB = 50 x 400 uA = 20 mA digunakan adalah transistor dengan β = 50. Penyalaan LED diatur Arus sebesar ini cukup untuk menyalakan LED pada saat transistor cut-off. Tegangan VCE pada saat cut-off idealnya = 0, dan aproksimasi ini sudah cukup untuk rangkaian ini. RL = (VCC - VLED - VCE) / IC = (5 - 2.4 - 0)V / 20 mA = 2.6V / 20 mA = 130 Ohm Daerah Breakdown Dari kurva kolektor, terlihat jika tegangan VCE lebih dari 40V, arus IC menanjak naik dengan cepat. Transistor pada daerah ini disebut berada pada daerah breakdown. Seharusnya transistor tidak boleh bekerja pada daerah ini, karena akan dapat merusak transistor tersebut. Untuk berbagai jenis transistor nilai tegangan VCEmax yang diperbolehkan sebelum breakdown bervariasi. VCEmax pada databook transistor selalu dicantumkan juga. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 19 LANDASAN TEORI 2.4.2 Saklar Toggel Saklar toggel merupakan bentuk saklar yang paling sederhana, dioperasikan oleh sebuah tuas yang dapat ditekan keatas dan kebawah. Menurut konfensinya, posisitual kebawah mengindikasikan konsisi off atau kontak saklar terputus, dan posisi tuas ke atas kengindikasikan kondisi on atau terhubung. Saklar-saklar toggel yang lebih besar memiliki dua tag terminal yang mengindikasikan bahwa saklar-saklar ini memiliki kontak jenis single pole single throw atau satu kutub satu arah biasa disingkat SPST. Saklar-saklar toggle yang berukuran lebih kecil memiliki tiga buah tag terminal, yaitu kontak jenis single pole double throw atau satu kutub dua arah, biasanya disingkat SPDT. Tag terminal yang berbeda ditengah adalah jalur arus bersama dan dapat membentukkontak dengan salah satu dari kedua tag lainnya. Kontak-kontak semacam ini seribf disebut sebagai kontak-kontak ganti Changeover contact. Simbol untuk saklar SPST dan SPDT dapat dilihat pada gambar 2.13 Gambar 2.13 Simbol saklar SPST dan SPDT 2.5 Driver Untuk menggerakan motor stepper berbeda dengan menggerakan motor dc, dimana untuk menggerakan motor stepper diperlukan rangkaian driver yang fungsinya untuk memberikan catu ke motor stepper. Driver tidak hanya mengeluarkan tegangan, namun tegangan yang dikeluarkan juga harus dalam bentuk pulsa. Karena motor stepper bergerak step by step sesuai dengan pulsa. Bentuk pulsa yang dikeluarkan oleh Driver dapat dilihat pada Gambar 2.14 dan Gambar 2.15. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 20 LANDASAN TEORI Gambar 2.14. Pulsa Driver Bipolar mode Full Step Gambar 2.15. Pulsa Driver Unipolar mode Full Step Bentuk pulsa seperti pada Gambar 2.14 dan Gambar 2.15.harus dapat dikeluarkan oleh Driver sebagai syarat untuk dapat menggerakan motor stepper. tinggi pulsa yang dikeluarkan juga harus sesuai dengan spesifikasi tegangan motor stepper yaitu kisaran 5 sampai 36 volt. Pada pada Gambar 2.14 dan Gambar 2.15 sebenarnya memiliki bentuk yang sama hanya saja susunannya berbeda. pada Gambar 2.14 adalah susunan pulsa untuk menggerakan motor stepper tipe bipolar, sedangkan pada Gambar 2.15 adalah susunan pulsa untuk menggerakan motor stepper tipe unipolar. Driver untuk motor stepper unipolar lebih sederhana dari driver tipe bipolar karena untuk motor stepper tipe unipolar driver cukup dengan dilalui arus satu arah saja sedangkan untuk tipe bipolar driver harus dapat dilalui oleh arus dengan dua arah. dari alasan ini motor stepper tipe unipolar lebih banyak digunakan karena untuk menggerakannya lebih sederhana. driver untuk motor stepper unipolar data menggunakan ULN2803. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 21 LANDASAN TEORI Gambar 2.16 IC ULN 2803 IC ini merupakan piranti yang menghubungkan dua piranti lainnya. Driver biasanya mempunyai impedansi masukan yang tinggi dan impedansi keluaran yang rendah, yang dalam sistem digital berarti arus masukan yang kecil dan arus keluaran yang besar. IC ULN 2803A merupakan driver yang didalamnya berisi rangkaian transistor darlington 8 pasang. Setiap pasangan transistor darlington mampu mengendalikan beban 500mA, dan apabila diperlukan untuk mengemudikan beban yang lebih besar maka dapat disusun secara parallel. 2.6 Motor Stepper Motor stepper merupakan motor yang mengubah pulsa listrik menjadi gerakan rotor yang diskrit disebut step. Misalnya jika satu derajat per langkah (step) maka motor tersebut memerlukan 360 pulsa untuk bergerak sebanyak satu putaran (pada intinya stepper motor mengubah pulsa listrik menjadi suatu perpindahan gerak yang tertentu secara rotasi) . Ukuran kerja dari stepper biasanya diberikan dalam jumlah langkah per putaran per detik. Motor stepper banyak digunakan dalam bidang industri terutama dipakai pada suatu mesin atau peralatan kontrol digital yang membutuhkan ketepatan posisi. Keunggulan motor stepper lainnya adalah frekuensi pulsa input-nya tidak tergantung pada beban. Perputaran motor stepper adalah perputaran yang diskrit dan arah perputarannya dapat searah ataupun berlawanan dengan arah jarum jam. Jika dilihat dari prinsipnya motor stepper terbagi menjadi tiga jenis motor, dimana 3 jenis motor stepper memiliki karakteristik yang berbeda-beda. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 22 LANDASAN TEORI Sedangkan jika dilihat dari lilitan yang ada didalamnya motor stepper dapat dibagi menjadi 2 jenis. 2.6.1 Jenis motor Stepper Berdasarkan Prinsip Kerjanya 2.6.1.1 Permanen Magnet (PM) Motor stepper berjenis PM adalah motor stepper yang rotornya merupakan magnet yang permanen, stator memperoleh medan magnet dari lilitan yang melingkari stator tersebut sehingga stator menghasilkan kutub – kutub magnet. Dengan adanya interaksi antara fluks rotor dengan gaya magnet stator maka motor stepper ini akan bergerak atau beroperasi. Terjadinya fluks dikarenakan pembiasan dari magnet rotor. Ciri – ciri dari motor stepper bejenis PM adalah pada saat keadaan tidak ada aliran arus (biasa disebut keadaan tanpa eksitasi) maka jika motor ini diputar terdapat torsi yang menahan atau melawan. Gambar 2.17 Konstruksi Motor Stepper Magnet Permanent Gambar 2.17 merupakan magnet permanent sederhana 90 derajat motor magnet permanent dengan empat phase (A-D). 2.6.1.2 Variable Reluctance (VR) Motor stepper jenis ini memiliki bentuk rotor yang unik yaitu berbentuk silinder dan pada semua unitnya memiliki gerigi yang memiliki hubungan dengan kutub-kutub stator. Rotor pada magnet tipe ini tidak menggunakan magnet permanent. Stator terlilit oleh lilitan sehingga pada saat teraliri arus, stator akan menghasilkan kutub magnet. Jumlah gerigi MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 23 LANDASAN TEORI pada rotor akan menentukan langkah atau step motor. Perbedaan motor stepper berjenis PM dengan VR yaitu motor berjenis VR memiliki torsi yang relatif lebih kecil dibanding dengan motor stepper berjenis PM. Hal lain yang dapat dilihat adalah sisa kemagnetan sangat kecil sehingga pada saat motor stepper tidak dialiri arus maka ketika diputar tidak ada torsi yang melawan. Sudut langkah motor stepper berjenis VR ini bervariasi yaitu sekitar sampai dengan 30o. Motor stepper berjenis VR ini memiliki torsi yang kecil. Sering ditemukan pada printer dan instrumen-instrumen pabrik yang ringan yang tidak membutuhkan torsi yang besar. Gambar 2.18 Konstruksi Motor Stepper Variable Reluctance Seperti pada gambar 2.18 motor mempunyai 3 pasang kutub stator (A, B, C) yang diset terpisah 15 derajat. Arus dialirkan ke kutub A melalui lilitan motor yang menyebabkan tarikan magnetic yang menyejajarkan gigi rotor kekutub A. jika kita memberi energi kekutub B maka akan menyebabkan rotor berputar 15 derajat sejajar kutub B. proses ini akan berlanjut kekutub C dan kembali kekutub A searah dengan jarum jam 2.6.1.3 Permanent Magnet – Hybrid (PM-H) Permanent magnet hybrid merupakan penyempurnaan motor stepper di mana motor stepper ini memiliki kecepatan 1000step/detik namun juga memiliki torsi yang cukup besar sehingga dapat dikatakan bahwa PM-H merupakan motor stepper kombinasi antara PM dan VR motor stepper. Motor hybrid mengkombinasikan karakteristik terbaik dari motor variable reluktansi dan motor magnet permanent. Motor ini dibangun dengan kutub stator yang banyak-gigi dan rotor magnet permanent. Motor hybrid standar mempunyai 200 gigi rotor dan berputar MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 24 LANDASAN TEORI pada 1,8 derajat sudut step. Karena memperlihatkan torsi tinggi dan dinamis serta berputar dengan kecepatan yang tinggi maka motor ini digunkan pada aplikasi yang sangat luas. Gambar 2.19. Konstruksi Motor Stepper Jenis PM-hybrid 2.6.2 Jenis Motor Stepper Berdasarkan Lilitannya 2.6.2.1 Motor Stepper Unipolar Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center tap dari masing masing lilitan ada yang berupa kabel terpisah ada juga yang sudah terhubung didalamnya sehingga center tap yang keluar hanya satu kabel. Untuk motor stepper yang center tapnya ada pada masing – masing lilitan kabel inputnya ada 6 kabel. Namun jika center tapnya sudah terhubung di dalam kabel inputannya hanya 5 kabel. Center tap dari motor stepper dapat dihubungkan ke pentanahan atau ada juga yang menghubungkannya ke +VCC hal ini sangat dipengaruhi oleh Driver yang digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper unipolar pada Gambar 2.20. Gambar 2.20 . Konstruksi Motor Stepper Unipolar MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 25 LANDASAN TEORI 2.6.2.2 Motor Stepper Bipolar Motor stepper bipolar memiliki dua lilitan perbedaaan dari tipe unipolar adalah bahwa pada tipe bipolar lilitannya tidak memiliki center tap. Keunggulan tipe bipolar yaitu memiliki torsi yang lebih besar jika dibandingkan dengan tipe unipolar untuk ukuran yang sama. Pada motor stepper tipe ini hanya memiliki empat kabel masukan. Namun untuk menggerakan motor stepper tipe ini lebih rumit jika dibandingkan dengan menggerakan motor stepper tipe unipolar. Sebagai gambaran dapat dilihat konstruksi motor stepper bipolar pada Gamnar 2.21. Gambar 2.21. Konstruksi Motor Stepper Bipolar Bentuk asli dan susunan motor stepper dapat dilihat pada Gambar 2.22. Gambar 2.22. Bentuk Motor Stepper MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 26 LANDASAN TEORI Dudukan Almunium bagian belakan Sekrup Bulatan kumpulan stator d Dudukan Almunium bagian Rotor dengan bearing belakang Gambar 2.23. Bagian Motor Stepper. Dari Gambar 2.23 dapat dilihat bagian-bagian dari motor stepper yaitu tersusun atas rotor, stator, bearing, casing dan sumbu. sumbu merupakan pegangan dari rotor dimana sumbu merupakan bagian tengah dari rotor, sehingga ketika rotor berputar sumbu ikut berputar. Stator memiliki dua bagian yaitu pelat inti dan lilitan. Plat inti dari motor stepper ini biasanya menyatu dengan casing. Casing motor stepper terbuat dari aluminium dan ini berfungsi sebagai dudukan bearing dan stator pemegangnya adalah baud sebanyak empat buah. Di dalam motor stapper memiliki dua buah bearing yaitu bearing bagian atas dab bearing bagian bawah. Gambar 2.24. Bagian Stator Motor stepper MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 27 LANDASAN TEORI Gambar 2.25. Bagian Rotor Motor stepper 2.7 Regulator Regulator adalah rangkaian regulasi atau pengatur tegangan keluaran dari sebuah catu daya agar efek darinaik atau turunnya tegangan jala-jala tidak mempengaruhi tegangan catu daya sehingga menjadi stabil. Ada 4 jenis regulator : 1. Regulator dengan Zener 2. Regulator ZenerFollower 3. Regulator dengan op-amp 4. Regulator dengan IC (Integrated Circuit) 2.7.1. Regulator IC (Integrated Circuit) IC regulator adalah suatu circuit/rangkaian elektronik yang terintegrasi yang berfungsi mengatur (membatasi) arus tegangan listrik yang dihasilkan oleh altenator atau sumber tegangan. Sekarang mestinya tidak perlu susah payah lagi mencari op-amp, transistor dan komponen lainnya untuk merealisasikan rangkaian regulator karena rangkaian semacam ini sudah dikemas menjadi satu IC regulator tegangan tetap. Salah satu metode agar dapat menghasilkan tegangan output DC stabil adalah dengan menggunakan IC 78XX untuk tegangan positif dan IC 79XX untuk tegangan negatif dalam sistem Regulator Tegangan. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 28 LANDASAN TEORI 1. IC 7805 untuk menstabilkan tegangan DC +5 Volt 2. IC 7809 untuk menstabilkan tegangan DC +9 Volt 3. IC 7812 untuk menstabilkan tegangan DC +12 Volt 4. IC 7824 untuk menstabilkan tegangan DC +24 Volt 5. IC 7905 untuk menstabilkan tegangan DC -5 Volt 6. IC 7909 untuk menstabilkan tegangan DC -9 Volt 7. IC 7912 untuk menstabilkan tegangan DC -12 Volt 8. IC 7924 untuk menstabilkan tegangan DC -24 Volt Komponen ini biasanya sudah dilengkapi dengan pembatas arus ( current limiter ) dan juga pembatas suhu ( thermal shutdown ). Komponen ini hanya tiga pin dan dengan menambah beberapa komponen saja sudah dapat menjadi rangkaian catu daya yang terregulasi dengan baik.Misalnya 7805 adalah regulator untuk mendapat tegangan 5 volt, 7812 regulator tegangan 12 volt dan seterusnya, sedangkan seri 79XX misalnya adalah 7905 dan 7912 yang berturutturut adalah regulator tegangan negatif 5 dan 12 volt. IC regulator tersebut akan bekerja sebagai regulator tegangan DC yang stabil jika tegangan input di atas atau sama dengan MIV (Minimum Input Voltage), sedangkan arus maksimum beban output yang diperbolehkan harus kurang dari atau sama dengan MC (Maximum Current) sesuai karakteristik masing-masing. Tabel 2.2: Nilai MIV dan MC IC Regulator Type Regulation Maximum Maximum number voltage current input voltage 7805 +5 1A +7V 7809 +9 2A +12V 7812 +12 1A +14.5V Berikut ini adalah gambar rangkaian dasar regulator tegangan dengan input DC stabil. MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 29 LANDASAN TEORI Gambar 2.26 Rangkaian Dasar IC Regulator Untuk mengetahui susunan kaki IC regulator 78XX dan 79XX, dapat dilihat dari gambar berikut : Gambar 2.27 Susunan Kaki IC Regulator 78XX Keterangan : 1. INPUT 2. GND 3. OUTPUT Gambar 2.28 Susunan Kaki IC Regulator 79XX Keterangan : 1. GND 2. INPUT 3. OUTPUT MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 30 LANDASAN TEORI Gambar 2.29 Bentuk Fisik IC Regulator MODUL SIMULASI KERUSAKAN PERGERAKAN MOTOR STEPPER 31