Sistem Pengaturan Kecepatan Motor Induksi Rotor Belitan
advertisement

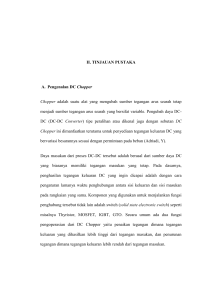
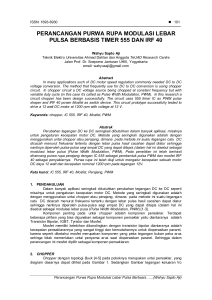
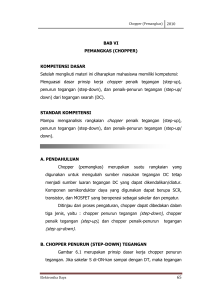
Wijaya Kusuma, Sistem Pengaturan Motor Induksi, Halaman 33-40 Sistem Pengaturan Kecepatan Motor Induksi Rotor Belitan Menggunakan DC Chopper Wijaya Kusuma 1 Sistem pengendalian slip digunakan pada motor induksi rotor belitan untuk mengatur kecepatan putaran motor serta untuk memperbaiki kinerja dari sistem kendali, khususnya berhubungan dengan faktor daya dan efisiensi sistem secara keseluruhan. Konverter thyristor 12-pulse digunakan sebagai mode inverter dengan penambahan DC chopper yang digunakan untuk mentransfer slip energi balik ke suplai utama AC melalui transformator tiga fasa. Pengaturan kecepatan motor ini dilakukan dengan mengubah duty cycle dari chopper dengan mengubah sudut penyalaan inverter. Dengan demikian faktor daya suplai akan dapat diperbaiki. Kata-kata kunci:sistem pengendalian slip, motor induksi, rotor belitan, DC chopper Abstract This research introduces a slip energy recovery drive system for speed control of a wound rotor induction motor offering improvement of drive performance, particularly line power factor and overall system efficiency. A 12-pulse line commutated thyristor converter operating in an inverter mode in conjunction with an additional DC chopper is employed to transfer slip energy back to ac mains supply via three phase transformers. This approach offers motor speed control by varying the duty cycle of the chopper instead of changing the inverter firing angle. As a consequence, supply power factor can be improved. Keywords: slip, energy recovery, induction motor, wound rotor, DC chopper I. PENDAHULUAN Aplikasi kendali motor induksi dengan kontrol daya pada sisi stator banyak digunakan dalam aplikasi di industri. Aplikasi kendali ini dapat digunakan baik pada motor induksi rotor sangkar maupun rotor belitan (wound rotor), dengan pertimbangan bebannya ringan, biaya murah, inertia rotor rendah, batasan kecepatan, pemeliharaan dan keandalan. Pada motor belitan, daya slip dapat diberikan dengan mudah melalui slip-ring, yang kemudian dapat dikontrol secara mekanik atau elektronik untuk pengaturan kecepatan motor. 1 Wijaya Kusuma. Dosen Program Studi Teknik Listrik Jurusan Teknik Elektro, Politeknik Negeri Malang Jurnal ELTEK, Volume 09 Nomor 02, Oktober 2011 ISSN 1693-4024 Motor belitan ini mempunyai beberapa kelebihan. Daya slip untuk pengaturan kecepatan dapat diatur dengan menggunakan konverter statik sehingga menghilangkan rugi disipasi pada resistor. Slip energy recovery drives telah banyak digunakan dalam beberapa aplikasi, seperti pada pompa kapasitas besar, kendali kipas, sistem variable-speed energi angin, sistem variable-speed/ constant-frequency, variable-speed pompa hydro/generator dan utility system flywheel energy storage systems. Slip energy recovery drivesyang dikenal sebagai sistem Scherbius ini relatif rendah biaya, rangkaian kontrolnya mudah dan mempunyai efisiensi yang tinggi pada putaran rendah. Sistem ini mentransfer daya dari rotor motor induksi kembali ke suplai AC utama untuk memperbaiki efisiensi drive. Masalah dari slip energy recovery drives ini adalah rendahnya faktor daya, umumnya berkisar 0,4 - 0,6. Oleh karena itu, perlu dilakukan suatu cara untuk memperbaiki rendahnya faktor daya ini, yaitu dengan menggunakan DC chopper yang digunakan untuk memperbaiki faktor daya suplai pada range kecepatan antara 50%- 80% putaran sinkron. Selain itu skema ini juga digunakan untuk mengatur kecepatan motor dengan mengatur duty cycle dari chopper. 2. KAJIAN PUSTAKA 2.1 Motor Induksi Motor induksi merupakan motor arus bolak-balik yang mempunyai penggunaan paling luas, terutama pada industri. Motor induksi ini mempunyai beberapa kelebihan, antara lain mempunyai kontruksi yang kokoh dan sederhana, pemeliharaan yang relatif mudah dan murah dibandingkan dengan motor arus searah. Motor induksi terdiri dari dua bagian utama, yaitu stator dan rotor. Bagian rotor ini terdiri atas dua jenis, yaitu rotor sangkar (squirrel cage) dan rotor belitan (wound rotor). Motor induksi rotor sangkar mempunyai rotor dengan kumparan yang terdiri atas beberapa konduktor yang disusun menyerupai sangkar tupai. Sedangkan rotor belitan terdiri dari tiga buah belitan yang tersusun dengan hubungan bintang (Y). 2.2 DC Chopper Sesuai dengan kata aslinya, chopper dalam bahasa Indonesia mempunya arti ‘pemotong’. Bila diartikan secara kamus, DC Chopper dapat diartikan sebagai ‘pemotong arus searah’. Dan arti DC Chopper sebenarnya tidak begitu jauh dari pengertianya sebagai pemotong arus searah. Wijaya Kusuma, Sistem Pengaturan Motor Induksi, Halaman 33-40 Variabel yang diubah besarnya oleh DC Chopper adalah tegangan dc yang keluar dari penyearah gelombang penuh dan juga arus yang lewat pada saklar, dimana saklar disini adalah sebuah transistor. Bila besarnya Va berubah maka besarnya Ia juga berubah. Untuk mengubah Vo melalui DC Chopper dapat dilakukan dengan mengubah lamanya on atau off dari komponen chopper. Hal ini dapat dilakukan dengan cara: constan frequency operation. Frekuensi f (periode T) dijaga konstan dan lamanya on dari t1 dibuat bervariasi. Ini dekenal dengan Pengaturan Lebar Pulsa atau PWM. S R0 Gambar 1. Rangkaian DC Chopper Komponen Chopper dapat diimplimentasikan dengan menggunakan: 1. Power Transistor 2. Power mosfet 3. GTO 4. Komutasi paksa Thjyristor S Va Vs Dm R0 (a) (b) Gambar 2. DC Choper dengan beban R (a) Kondisi on, (b) Kondisi off Keterangan : Vs : tegangan keluaran rectifier Jurnal ELTEK, Volume 09 Nomor 02, Oktober 2011 ISSN 1693-4024 Va : tegangan pada R0 R0 : beban resistif Dm : dioda freewheel 2.3 Sistem Pengendalian Slip Sistem pengendalian slip ini terdiri dari motor induksi rotor belitan (wound rotor), rectifier jembatan dioda, link induktansi, inverter jembatan thyristor dan sebuah transformator 3 fasa. Sebagai tambahan, dipasang transformator step-down antara suplai AC dan modul inverter, sehingga rating tegangan inverter dan rectifier device dapat dibuat lebih kecil daripada rating tegangan stator. Gambar 3. Skema Sistem Pengendalian Slip 3. HASIL DAN PEMBAHASAN Pengujian yang dibahas dalam penelitian ini meliputi : a. Bentuk gelombang arus dan spektrum harmonik. b. Faktor daya (PF), displacement power factor (DPF) dan total harmonic distortion (THD). c. Efisiensi sistem (η). Gambar 4. Bentuk Gelombang Aruspada Sistem PengendalianSlipdengan chopper pada slip 0,5 Gambar 5. Bentuk Gelombang Arus pada Sistem Pengendalian Sliptanpa chopper pada slip 0,5 Wijaya Kusuma, Sistem Pengaturan Motor Induksi, Halaman 33-40 Gambar 4-5 menunjukkan bentuk gelombang arus pada penggunaan sistem pengendalian slip dengan chopper dan sistem pengendalian slip tanpa chopper pada slip 0,5. Bentuk gelombang arus line suplai (ILine) dari sistem pengendalian slip tanpa chopper adalah lebih baik dibanding penggunaan sistem pengendalian slip dengan chopper. Dengan demikian penambahan chopper tidak dapat memperbaiki kualitas arus line pada operasi putaran rendah. Bentuk gelombang arus line inverter (Iinv) pada sistem pengendalian slip dengan chopper adalah lebih baik daripada sistem pengendalian slip tanpa chopper. Bentuk gelombang arus stator (Istator) dan bentuk gelombang arus (Irotor) pada semua drive relatif sama. Gambar 6. Spektrum Harmonic Gambar 7. Spektrum Harmonic ILine pada Sistem Pengendalian ILine pada Sistem Pengendalian Slipdengan chopper pada slip Sliptanpa chopper pada slip 0,5 0,5 Gambar 6-7 menunjukkan spektrum harmonik arus line suplai (ILine) mengacu pada Gambar 4-5. Magnitude arus fundamental dari sistem pengendalian slip dengan chopper paling kecil dibanding sistem pengendalian slip tanpa chopper. Penambahan chopper mengakibatkan turunnya magnitude arus fundamental, tetapi meningkatkan faktor daya. Gambar 8. Bentuk Gelombang Gambar 9. Bentuk Gelombang Sistem Pengendalian Slip dengan Sistem Pengendalian Slip tanpa chopper pada slip 0,2 chopper pada slip 0,2 Jurnal ELTEK, Volume 09 Nomor 02, Oktober 2011 ISSN 1693-4024 Gambar 8-9 menunjukkan bentuk gelombang arus sistem drive pada operasi putaran tinggi. Berbeda dengan saat operasi putaran rendah, sistem pengendalian slip dengan chopper mempunyai bentuk gelombang paling bagus dibanding sistem pengendalian slip tanpa chopper. Hasil ini menunjukkan bagaimana kondisi pengoperasian sistem pengendalian slip tanpa chopper pada daerah putaran tinggi. Gambar 10. Spektrum Harmonic Gambar 11. Spektrum Harmonic ILine ILine pada Sistem Pengendalian pada Sistem Pengendalian Sliptanpa Slipdengan chopper pada slip 0,2 chopper pada slip 0,2 Gambar 10-11 menunjukkan spektrum harmonik dari arus line suplai mengacu pada Gambar 8-9. Sedangkan magnitude dari arus fundamental dan besarnya harmonik pada setiap drive adalah sama pada operasi putaran tinggi. Tabel 1. Persentase THD, DPF, PF dan efisiensi (η) pada slip = 0,6 Teknik Drive Sistem Pengendalian Slip dengan chopper Sistem Pengendalian Slip tanpa chopper THDv(%) 1,0 THDi(%) 13,2 DPF 0,62 PF 0,60 η (%) 31,41 1,0 8,4 0,43 0,42 31,41 Tabel 2. Persentase THD, DPF, PF dan efisiensi (η) pada slip = 0,5 Teknik Drive Sistem Pengendalian Slip dengan chopper Sistem Pengendalian Slip tanpa chopper THDv(%) 1,0 THDi(%) 12,2 DPF 0,70 PF 0,68 η (%) 39,27 1,0 7,0 0,49 0,48 36,81 Wijaya Kusuma, Sistem Pengaturan Motor Induksi, Halaman 33-40 Tabel 3. Persentase THD, DPF, PF dan efisiensi (η) pada slip = 0,2 Teknik Drive Sistem Pengendalian Slip dengan chopper Sistem Pengendalian Slip tanpa chopper THDv(%) 1,0 THDi(%) 5,7 DPF 0,73 PF 0,72 η(%) 52,36 1,0 6,4 0,58 0,56 41,88 Tabel 4. Persentase THD, DPF, PF dan efisiensi (η) pada slip = 0,1 Teknik Drive Sistem Pengendalian Slip dengan chopper Sistem Pengendalian Slip tanpa chopper THDv(%) 1,0 THDi(%) 3,9 DPF 0,80 PF 0,77 η(%) 54,37 1,0 6,2 0,60 0,58 44,16 Tabel 1-4 menunjukkan perbandingan kinerja drive pada slip 0,6; 0,5; 0,2 dan 0,1. Teknik drive sistem pengendalian slip dengan chopper menghasilkan faktor daya paling tinggi dibanding yang diperoleh dari sistem pengendalian slip tanpa chopper pada range kecepatan tersebut. Efisiensi sistem dari sistem pengendalian slip dengan chopper juga relatif paling tinggi dibanding sistem pengendalian slip tanpa chopper. Faktor daya, displacement power factor dan efisiensi pada seluruh drive pada putaran tinggi adalah lebih tinggi daripada saat operasi putaran rendah. Total harmonic distortion (THD) dari arus suplai pada sistem pengendalian slip dengan dengan chopper adalah sangat baik dibanding sistem pengendalian slip tanpa chopper pada operasi putaran tinggi, tapi tidak demikian bila beroperasi pada putaran rendah. Akibatnya perbaikan performa dengan sistem pengendalian slip dengan chopper ini lebih tepat pada operasi putaran tinggi. 4. PENUTUP Dari pengujian kinerja drive pada motor induksi wound rotor dengan operasi putaran tinggi dan rendah, diperoleh hasil: 1. Teknik drive sistem pengendalian slip dengan chopper : a. Pada slip 0,6 diperoleh THDV 1,0%, THDi 13,2%, displacement factor 0,62, power factor 0,60 dan efisiensi 31,41%. Jurnal ELTEK, Volume 09 Nomor 02, Oktober 2011 ISSN 1693-4024 b. Pada slip 0,5 diperoleh THDV 1,0%, THDi 12,2%, displacement factor 0,7, power factor 0,68 dan efisiensi 39,27%. c. Pada slip 0,2 diperoleh THDV 1,0%, THDi 5,7%, displacement factor 0,73, power factor 0,72 dan efisiensi 52,36%. d. Pada slip 0,1 diperoleh THDV 1,0%, THDi 3,9%, displacement factor 0,80, power factor 0,77 dan efisiensi 54,37%. 2. Teknik drive sistem pengendalian slip tanpa chopper : a. Pada slip 0,6 diperoleh THDV 1,0%, THDi 8,4%, displacement factor 0,43, power factor 0,42 dan efisiensi 31,41%. b. Pada slip 0,5 diperoleh THDV 1,0%, THDi 7,0%, displacement factor 0,49, power factor 0,48 dan efisiensi 36,81%. c. Pada slip 0,2 diperoleh THDV 1,0%, THDi 6,4%, displacement factor 0,58, power factor 0,56 dan efisiensi 41,88%. d. Pada slip 0,1 diperoleh THDV 1,0%, THDi 6,2%, displacement factor 0,60, power factor 0,58 dan efisiensi 44,16%. 3. Berdasarkan hasil pengujian diperoleh bahwa teknik drive sistem pengendalian slip dengan chopper adalah yang paling baik bila dibandingkan dengan sistem pengendalian slip tanpa chopper ditinjau dari faktor daya suplai, efisiensi sistem dan nilai THD, khususnya bila motor dioperasikan pada putaran tinggi. 5. DAFTAR PUSTAKA Borges L.E. da Silva, Nakashima, K.,. Torres, G.L, V. Ferreira da Silva, G. Olivier and G.-E. April .1991. Improving Performance of Slip-Recovery Drive: An Approach using Fuzzy Techniques. 0-7803-0453-5/ 1991 IEEE. Faiz, J., Barati, H, dan E, Akpinar. 2001. Harmonic Analysis and Performance Improvement of Slip Energy Recovery Induction Motor Drives. 2001. IEEE Trans. Power Electron. 16 (3) (2001) Krishnan, R. 2001, Electric Motor Drives Modeling Analysis and Control, Prentice-Hall, Inc. Papathanassiou, S.A dan Papadopoulos, M.P. 1998. Commutation Angle Analysis of Slip Energy Recovery Drive. IEEE Trans. Energy Convers. 13 (1) (1998) Sen, P.C dan K.H.J. Ma.1978. Constant Torque Operation of Induction Motors using Chopper in Rotor Circuit. IEEE Trans. Ind. Appl. 14 (5) (1978) 41