Digital elevation Model - Perpustakaan Digital ITB
advertisement

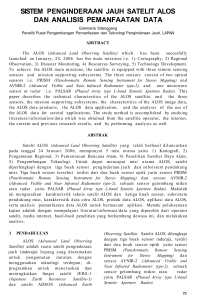
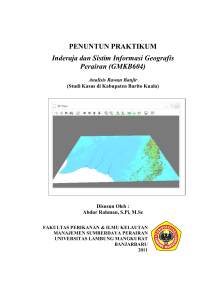
BAB II DASAR TEORI 2.1 DEM (Digital elevation Model) 2.1.1 Definisi DEM Digital Elevation Model (DEM) merupakan bentuk penyajian ketinggian permukaan bumi secara digital. Dilihat dari distribusi titik yang mewakili bentuk permukaan bumi dapat dibedakan dalam bentuk teratur, semi teratur, dan acak. Sedangkan dilihat dari teknik pengumpulan datanya dapat dibedakan dalam pengukuran secara langsung pada objek (terestris), pengukuran pada model objek (fotogrametris), dan dari sumber data peta analog (digitasi). Teknik pembentukan DEM selain dari Terestris, Fotogrametris, dan Digitasi adalah dengan pengukuran pada model objek, dapat dilakukan seandainya dari citra yang dimiliki bisa direkonstruksikan dalam bentuk model stereo. Ini dapat diwujudkan jika tersedia sepasang citra yang mencakup wilayah yang sama. Terdapat beberapa definisi tentang DEM, yaitu : “DEM adalah teknik penyimpanan data tentang topografi suatu terrain. Suatu DEM merupakan penyajian koordinat (X, Y, H) dari titik-titik secara digital, yang mewakili bentuk topografi suatu terrain.” [Dipokusumo dkk, 1983] “Digital Elevation Model (DEM) adalah representasi statistik permukaan tanah yang kontinyu dari titik-titik yang diketahui koordinat X, Y, dan Z nya pada suatu sistem koordinat tertentu.” [Petrie dan Kennie, 1991] “DTM/DEM adalah suatu set pengukuran ketinggian dari titik-titik yang tersebar di permukaan tanah. Digunakan untuk analisis topografi daerah tersebut.” [Aronoff, 1991] “DEM adalah suatu basis data dengan koordinat X, Y, Z, digunakan untuk merepresentasikan permukaan tanah secara digital.” [Kingston Centre for GIS, 2002] ‐6‐ “DEM adalah informasi digital mengenai ketinggian (atau variasi relief) dari suatu area.” [Spatial Data Systems Consulting, 2002] Dari beberapa defenisi di atas, dapat diambil kesimpulan bahwa semua defenisi tersebut merujuk pada pemodelan permukaan bumi ke dalam suatu model digital permukaan tanah tiga dimensi dari titik-titik yang mewakili permukaan tanah tersebut. DEM terbentuk dari titik-titik yang memiliki nilai koordinat 3D (X, Y, Z). Permukaan tanah dimodelkan dengan memecah area menjadi bidang-bidang yang terhubung satu sama lain dimana bidang-bidang tersebut terbentuk oleh titik-titik pembentuk DEM. Titik-titik tersebut dapat berupa titik sample permukaan tanah atau titik hasil interpolasi atau ekstrapolasi titik-titik sample. Titik-titik sample merupakan titik-titik yang didapat dari hasil sampling permukaan bumi, yaitu pekerjaan pengukuran atau pengambilan data ketinggian titik-titik yang dianggap dapat mewakili relief permukaan tanah. Data sampling titik-titik tersebut kemudian diolah hingga didapat koordinat titik-titik sample. 2.1.2 Kualitas DEM Kualitas suatu DEM dapat dilihat pada akurasi dan presisi dari DEM tersebut. Yang dimaksud dengan akurasi adalah nilai ketinggian titik (Z) yang diberikan oleh DEM, berbanding dengan nilai sebenarnya yang dianggap benar. Sedangkan presisi adalah banyaknya informasi yang dapat diberikan oleh DEM. Presisi bergantung pada jumlah dan sebaran titik-titik sample dan ketelitian titik sample sebagai masukan/input bagi pembentukan DEM dan juga metode interpolasi untuk mendapatkan ketinggian titik-titik pembentuk DEM. Titik-titik sample yang dipilih untuk digunakan harus dapat mewakili bentuk terrain secara keseluruhan sesuai dengan kebutuhan aplikasi penggunaannya. 2.1.3 Aplikasi Penggunaan DEM DEM digunakan dalam berbagai apllikasi baik secara langsung dalam bentuk visualisasi model permukaan tanah maupun dengan diolah terlebih dahulu ‐7‐ sehingga menjadi produk lain. Informasi dasar yang diberikan DEM dan digunakan dalam pengolahan adalah koordinat titik-titik pada permukaan tanah. Informasi lain yang dapat diturunkan dari DEM adalah : Jarak pada relief atau bentuk permukaan tanah Luas permukaan suatu area Volume galian dan timbunan Slope dan Aspect Kontur Profil Contoh aplikasi-aplikasi yang menggunakan DEM, yaitu : Rekayasa teknik sipil Pemetaan hidrografi Pemetaan topografi Pemetaan geologi dan geofisiska Rekayasa pertambangan Simulasi dan visualisasi permukaan tanah Rekayasa militer 2.1.4 Konsep Terbentuknya DEM Pada gambar 2.1 dapat terlihat bahwa citra kiri dan citra kanan mempunyai objek yang sama dengan sudut pandang yang berbeda, pada proses ini kita melakukan penyamaan pixel karena kita mencari kesekawanan objek antara citra kiri dan citra kanan. Pada proses matching ini posisi objek pada masing-masing citra akan berbeda, hal ini mengindikasikan terjadinya paralaks-x. Dengan adanya paralaks ini kita dapat melihat objek secara stereo. Masing-masing citra memiliki sistem koordinat lokal, maka kita harus membuatnya dalam sistem koordinat yang sama (sistem koordinat tanah). Objek pada kamera, citra, dan model (citra overlap) harus berada pada satu garis lurus (Collinearity). Objek pada citra kiri, citra kanan, dan pada model akan membentuk suatu bidang yang dinamakan bidang Epipolar. ‐8‐ (sumber : manual guide PCI 9.1) Gambar 2.1 Membuat DEM dari pasangan stereo Objek-objek yang kita pilih merupakan titik sample yang telah kita diketahui nilai koordinatnya (X, Y, Z), karena kita tidak mungkin mengambil semua titik objek yang ada pada citra overlap (model stereo). Sehingga kita melakukan proses interpolasi pada objek-objek yang lain atau disebut juga perbanyakan titik (Triangulasi Udara). Setelah melakukan proses tersebut maka kita dapat membentuk DEM dengan menghubungkan titik-titik tinggi. 2.2 The Advanced Land Observing Satellite (ALOS) ALOS memiliki tiga perangkat penginderaan jauh : Panchromatic Remote Sensing Instrument for Stereo Mapping (PRISM) untuk menghasilkan Digital Elevation Models (DEMs), the Advanced Visible and Near Infrared Radiometer type 2 (AVNIR-2) untuk peninjauan multispektral cakupan lahan, dan the Phased Array type L-band Synthetic Aperture Radar (PALSAR) untuk pengamatan daerah cuaca selama 24 jam. Sensor ini diharapkan bisa memberikan resolusi yang tinggi untuk pengamatan lahan. ‐9‐ ALOS digunakan untuk kartografi, pengamatan daerah, pangamatan bencana dan sumber penelitian. Misi dari pada ALOS adalah sebagai berikut : 1. Pengembangan digital elevation model (DEM), dan berhubungan dengan hasil data geografis untuk Jepang dan negara lain termasuk pada region AsiaPasifik (pembuatan peta). 2. Melakukan pengamatan daerah untuk pengembangan yang berkesinambungan (harmonisasi antara lingkungan bumi dengan pengembangannya) – (pengamatan daerah). 3. Monitoring bencana seluruh dunia (monitoring bencana). 4. Survey sumber daya alam (survey lapangan). 5. Pengembangan sensor dan teknologi satelit untuk satelit pengamatan bumi masa depan (pengembangan teknologi). (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.2 ALOS data nodes zone definition 2.2.1 Panchromatic Remote-Sensing instrument for Stereo Mapping (PRISM) PRISM adalah radiometer pankromatik dengan resolusi spasial 2.5 meter. Perangkat ini memiliki tiga teleskop untuk penglihatan dari depan (forward), ‐10‐ belakang (backward) dan tengah (nadir) yang bisa digunakan untuk menghasilkan Digital Elevation Model (DEM) dengan akurasi cukup untuk skala peta 1 : 25.000 2.2.2 Advanced Visible and Near Infrared Radiometer type 2 (AVNIR-2) Avnir-2 sebagian besar mengamati lahan, zona pesisir dan bisa memberikan informasi peta tutupan lahan dan tataguna lahan untuk memonitoring area lingkungan. 2.2.3 Phased Array type L-band Synthetic Aperture Radar (PALSAR) PALSAR merupakan sensor microwave aktif yang bisa mengamati cuaca selama 24 jam. Perangkat ini memilik performa yang lebih bagus dari the Synthetic Aperture Radar (SAR). Pada the Japanese Earth Resource Satellite-1 (JERS-1) sensornya mempunyai kendali sinar pada tingginya dan cara ScanSAR yang dapat memberikan ukuran yang lebih lebar daripada konvensional SARs. PALSAR dikembangkan bersama-sama dengan Japan Aerospace Exploration Agency (JAXA) dan the Japan Resource Observation System Organization (JAROS). 2.3 Karakteristik ALOS ALOS merupakan satelit Jepang yang mempunyai resolusi tinggi untuk pengamatan bumi. Ini dilengkapi dengan tiga perangkatnya yaitu PRISM, AVNIR-2, dan PALSAR. Untuk menggunakan data yang didapatkan dari sensornya, ALOS sudah merancangnya dengan kemampuan pengumpulan data dan ketelitian posisi serta kemampuan penentuan letak yang penting bagi satelit penginderaan jauh dengan resolusi tinggi pada abad mendatang. Berikut ini pada tabel 2.2 karakteristik dari ALOS dan pada gambar 2.4 konfigurasi dari orbit ALOS. ‐11‐ Tabel 2.1 Karakteristik ALOS (sumber : http://www.eorc.jaxa.jp/ALOS) (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.3 Konfigurasi orbit ALOS ‐12‐ 2.3.1 Karakteristik PRISM PRISM adalah komponen utama dari ALOS. Dia memiliki tiga sistem catoptrik penglihatan yaitu forward, backward, dan nadir untuk mengambil data sepanjang jalur stereoskopik. Beberapa teleskop terdiri dari tiga cermin dan beberapa CCD detector untuk pengamatan dengan tipe penyapuan. Pengamatan teleskop nadir mampu mencapai 70 km lebar cakupannya, sedangkan forward dan backward hanya 35 km lebar cakupannya. Seperti yang dilihat pada gambar 2.5, teleskop terpasang pada dua sisi dari dudukan optik dengan temperatur kontrol yang tepat. Teleskop forward dan backward cenderung lebih kurang 24 derajat dari nadir untuk mendapatkan dasarnya dengan perbandingannya adalah 1. PRISM field of view (FOV) memberikan pertampalan penuh dari tiga citra tanpa teknik pengamatan atau penyimpangan arah satelit. PRISM dengan resolusi 2.5 meter digunakan untuk ekstraksi Digital Elevation Model (DEM) dengan keakuratan yang tinggi. Karakteristik PRISM dapat dilihat pada tabel 2.2 dibawah ini. (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.4 Gambaran Cakupan PRISM ‐13‐ Tabel 2.2 Karakteristik PRISM NOTE: PRISM cannot observe areas beyond latitudes 82 degrees south and north. (sumber : http://www.eorc.jaxa.jp/ALOS) Bentuk pengamatan dari nadir, backward, and forward yaitu dua pengamatan (±1.20 derajat sudut pandang) per lintasan penting untuk keseluruhan cakupan pengamatan kecuali pada area dengan ruang lingkup yang besar. Pada gambar 2.5 dijelaskan gambaran sudut pandang PRISM secara acak. (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.5 Default Pointing Angle of PRISM ‐14‐ 2.3.2 Karakteristik AVNIR-2 AVNIR-2 merupakan sukses lanjutan dari AVNIR diatas the Advanced Earth Observing Satellite (ADEOS) yang dikeluarkan pada Agustus 1996. AVNIR-2 perbaikan dari AVNIR yang instantaneous field-of-view (IFOV). AVNIR-2 mempunyai resolusi citra sebesar 10 meter dibandingkan dengan 16 meter resolusinya AVNIR dalam region multispektral. Resolusi yang lebih tinggi dicapai dengan perbaikan CCD detectors (AVNIR : 5000 pixel per CCD, AVNIR2 : 7000 pixel per CCD) dan peralatan elektroniknya. Perbaikan lainnya adalah pada sudut bidiknya. Sudut bidik dari AVNIR-2 adalah ± 44 derajat untuk pengamatan langsung pada daerah bencana. Visualisasinya dapat dilihat pada gambar 2.6 dan tabel 2.3. (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.6 Gambaran Cakupan AVNIR-2 ‐15‐ Tabel 2.3 Karakteristik AVNIR-2 Note: AVNIR-2 cannot observe the areas beyond 88.4 degree north latitude and 88.5 degree south latitude. (sumber : http://www.eorc.jaxa.jp/ALOS) 2.3.3 Karakteristik PALSAR PALSAR merupakan produk SAR keluaran kedua Jepang yang menggunakan frekuensi L-band. Resolusinya tinggi sehingga memudahkan kita untuk mendapatkan lebar area 250-350 km (tergantung pada jumlah pengamatan) dari citra SAR berdasarkan resolusi spasialnya. Pada PALSAR ini 3-5 kali lebih lebar dari pada citra Real Aperture Radar yang digunakan untuk menghitung luas lautan es dan memonitor hutan hujan. PALSAR sudah dikembangkan oleh JAXA dan JAROS. Untuk lebih jelasnya dapat dilihat pada gambar 2.7 dan pada tabel 2.4 berikut ini. ‐16‐ (sumber : http://www.eorc.jaxa.jp/ALOS) Gambar 2.7 Gambaran Cakupan PALSAR Tabel 2.5 Karakteristik dari PALSAR (sumber : http://www.eorc.jaxa.jp/ALOS) ‐17‐