Rancang Bangun Alat Untuk Perbaikan faktor Daya Pada Beban
advertisement

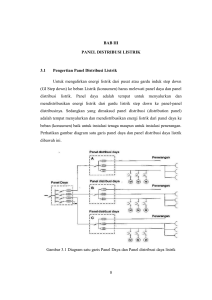
Rancang Bangun Alat Untuk Perbaikan faktor Daya Pada Beban Dinamis 1 fase dan Monitoring Daya Dengan LCD Grafik. Asrul Syafrianto1, Indhana Sudiharto ST.MT.2 Ir.Sutedjo, MT.3 Mahasiswa Jurusan Teknik Elektro Industri, PENS-IT, Surabaya ,Indonesia, e-mail: [email protected] 2 Dosen Jurusan Teknik Elektro Industri, PENS-ITS,Surabaya ,Indonesia. 3 Dosen Jurusan Teknik Elektro Industri, PENS-ITS,Surabaya ,Indonesia. Abstrak Perbaikan faktor daya sangat dibutuhkan dalam rumah tangga. Perlunya perbaikan faktor daya pada beban rumah tangga untuk meningkatkan efisiensi penggunaan daya aktif (Watt) sehingga bisa maksimal. Solusi dalam permasalahan ini yakni membuat alat perbaikan faktor daya (cos phi) menggunakan kapasitor bank. Kapasitor bank mampu meningkatkan cos phi hingga diatas 0.85. Pengaktifan kapasitor bank menggunakan soft switch dengan menggunakan Triac tipe BTA12. Penggunaan softswitch sebagai saklar dari pengaktifan kapasitor bank bertujuan untuk meredam arus inrush yang timbul akibat perpindahan dari off ke on. Pembacaan nilai cos phi , daya aktif, arus dan tegangan akan ditampilkan ke LCD grafik. Mikrokontroller sangat penting dalam menerapkan metode soft switch sebagai kontrol trigger Triac. Pada beban motor memiliki faktor daya yang buruk sehingga mengatasinya dengan menggunakan kapasitor 10uf dapat memperbaiki faktor daya yang awalnya 0.66 lagging menjadi 0.91 lagging. pada beban kulkas faktor daya awalnya 0.68 menjadi 0.94 lagging dengan capasitor 8 uf, sedangkan pada beban kulkas dan motor pompa yang awal faktor dayanya 0.71 lagging menjadi 0.96 lagging dengan capasitor 18 uf. Keywords: faktor daya , soft switch, Triac, arus inrush, mikrokontroller, cos phi, lagging , leading. yang bisa menjaga kualitas daya semakin baik yakni dengan menggunakan softswitch SVC dan penggunaan LCD grafik untuk menampilkan gelombang daya, tegangan, arus serta menampilkan nilai cos phinya. 1. PENDAHULUAN Kualitas daya yang baik akan memperbaiki drop tegangan, faktor daya, rugi–rugi daya, kapasitas daya dan efisiensi energi listrik. Perbandingan antara daya aktif (kW) dan daya semu (kVA) akan menghasilkan power faktor (Cos θ). Kualitas daya yang baik adalah jika power faktor > 0,8 (Cos θ > 0,8) sehingga meningkatkan efisiensi tenaga listrik. Beban-beban dengan sifat induktif menyebabkan rendahnya power faktor (Cos θ). Untuk memperbaiki power faktor (Cos θ) pada sistem tenaga listrik dengan beban induktif diperlukan suatu kompensator daya reaktif dengan mikrokontroler sebagai kontroller soft switch otomatis. Fungsi dari kontroler soft switch otomatis adalah untuk mengatur penggunaan kapasitor sesuai dengan nilai yang diinginkan dari faktor daya yang akan diperbaiki. Kompensator daya reaktif konvensional pada umumnya terdiri dari capasitor bank yang dihubungkan paralel dengan beban melalui switch kontaktor. Kompensator daya reaktif dengan switch kontaktor menyebabkan arus inrush yang sangat besar, dapat mencapai 5 sampai 7 kali arus nominal. Arus inrush terjadi hanya pada saat awal arus pengisian capasitor bank. Pada beban dinamis, maka power faktor selalu berfluktuasi dan arus inrush akan terjadi berulang-ulang, sehingga mengakibatkan kerusakan pada switch kontaktor dan capasitor. Pada proyek ini untuk mengatasi permasalahan pada kualitas daya tersebut, dipasang suatu peralatan 2. DASAR TEORI Teori yang digunakan sebagai pelaksanaan tugas akhir ini adalah: 2.1 dasar Kualitas Daya Daya dalam rangkaian DC sama dengan perkalian antara arus dan tegangan. Daya dalam rangkaian AC pada setiap saat sama dengan perkalian dari harga daya rata – rata dalan satu periode sama dengan perkalian antara arus dan tegangan efektif. Tetapi jika ada reaktansi dalam rangkaian, arus dan tegangan tidak sephase selama siklusnya seperti halnya arus bernilai negatif seraya tegangan bernilai positif. Hal ini menghasilkan besarnya daya kurang dari perkalian I dan V. Perkalian arus dan tegangan efektif dalam rangkaian AC dinyatakan dalam voltampere (VA) atau kilovoltampere (KVA). Satu KVA sama dengan 1.000 VA. Daya yang berguna atau daya nyata diukur dalam watt dan diperoleh jika voltampere dari rangkaian dikalikan dengan faktor yang disebut dengan faktor daya. Maka dalam rangkaian AC satu phase adalah: P(dalam watt) = V x I x faktor daya 1 tegangan bervariasi dalam rangkaian yang berbeda dari kondisi sephase sampai mendahului atau tertinggal ¼ siklus atau 90˚.oleh karena itu waktu dapat diukur dalam derajat listrik, beda waktu atau beda phase dari arus dan tegangan biasanya dinyatakan dalam derajat listrik dan disebut sudut phase. Pdalam watt Faktor daya VxI P = V × Iaktif P = VI Cos θ Oleh karena daya adalah EI dikalikan dengan faktor daya, maka faktor daya suatu rangakaian AC sama dengan kosinus dari sudut phase. Hubungan antara daya dalam watt (P), voltampere (VA) dan voltampere reaktif (VAR) dapat dinyatakan dengan segitiga seperti yang ditunjukkan dalam Gambar 2.2. sudut θ adalah sudut phase rangkaian. Alas segitiga menyatakan daya nyata (VA), tingginya menyatakan daya reaktif (VAR), dan hipotunosa menyatakan daya aktif (W). Harga faktor daya tergantung dari beda phase antara arus dan tegangan. Capasitor daya AC sebagai kompensator yang dihubungkan jaringan maka akan mengakibatkan arus beban mendahului 90 derajat, Ic=Im sin (wt+90°). Sehingga akan mengakibatkan arus beban menjadi sephase dengan tegangan. Dimana arus beban yang tertinggal 90 derajat akan terkompensasi arus capasitor mendahului sebesar 90 derajat, Ib=Ib sin (wt-90°+90°)=Ib sint. Hal tersebut ditunjukkan pada Gambar 2. 2. I V Gambar 2. 3 Arus dan tegangan V I Gambar 2. 4 Arus tertinggal 30˚ dari Tegangan I V Gambar 2. 1 Diagram phasor konsep kompensator Gambar 2. 5 Arus mendahui 30˚ dari Tegangan daya nyata ( VI cos θ ) θ daya reaktif ( VI sin θ ) 2.3 Penggunaan Segitiga Daya dan Tabel Cos θ Untuk Analisa Perbaikan Faktor Daya daya aktif (VI ) Gambar 2. 2 Hubungan antara daya, voltampere dan voltampere reaktif Oleh karena Voltampere sama dengan VI daya nyatanya adalah VI Cos θ, dan voltampere reaktifnya VI Sin θ. Juga terjadi hubungan sebagai berikut. Gambar 2.6 Segitiga Daya Penjumlahan dari daya aktif dan daya reaktif menghasilkan daya nyata. S P Q Dimana: P = daya aktif (kW) S = daya nyata (kVA) 2.2 Hubungan Phase Ada tiga kemungkinan hubungan phase antara arus dan tegangan dalam satuan rangkaian. 1. Arus dan tegangan mungkin sephase seperti yang ditunjukkan pada Gambar 2.4. 2. Tegangan dapat melalui harga nol dan naik ke harga tertinggi pada waktu yang lebih dahulu dari arus seperti dalam Gambar 2.5. Dalam hal ini arus dikatakan tertinggal dari tegangan. 3. Tegangan dapat melalui harga nol dan harga tertingginya pada beberapa saat kemudian dari pada arus seperti dalam gambar 2.6. Dalam hal ini arus dikatakan mendahului tegangan. Lamanya waktu dimana arus mendahului atau tertinggal dari Q = daya reaktif (kVAR) Faktor daya: daya aktif P cos θ daya nyata S 2.4 Zero Crossing dan Phase Detector (Detektor Phasa) Rangkaian ini berfungsi untuk mendeteksi perbedaan sudut phasa yang mengalir ke beban. Detektor Phasa dibuat menggunakan komparator dan gerbang logika XOR. Komparator digunakan untuk mendapatkan informasi saat nilai tegangan dan nilai arus tepat melewati titik nol. Gerbang logika XOR digunakan untuk mengetahui nilai beda sudut phasa. Nilai perbedaan sudut phasa didapat dengan menghitung selang waktu antara tegangan naik dan tegangan turun pada keluaran gerbang logika XOR. Rangkaian detektor phasa ini ditunjukkan pada Gambar 2.13, serta sinyal input dan output pada rangkaian zero crossing detector dapat dilihat pada Gambar 2.14. (a) 3. Perencanaan capasitor bank dan pembuatan soft switch. 4. Perencanaan dan pembuatan mikrokontroller dan display. 3.1. Perencanaan dan positive clamper Pembuatan rangkaian Rangkaian klamper pada tugas akhir ini dirancang dan dibuat untuk menaikan tegangan AC dengan nilai referensi tegangan minimum peak to peaknya diatas 0. Tujuan dari pembuatan rangkaian klamping ini untuk mendapatkan nilai tegangan AC yang dapat dibaca oleh ADC pada mikrokontroller. Karena ADC tidak dapat membaca nilai yang dibawah 0. Nilai tegangan AC keluaran rangkaian klamping yang dibaca ADC akan diproses pada mikrokontroller dan akan ditampilkan pada LCD grafik yang berbentuk gelombang sinus. (b) Gambar 2.7 (a) Rangkaian Detektor Phasa (b) Input dan output pada rangkaian phasa detector (b) (a) Gambar 3.2. (a).rangkaian positif clamper (b).hasil simulasi rangkaian positif clamper 2.5 Kapasitansi Kapasitor Bank Perhitungan nilai capasitor digunakan untuk setiap beban yang terpasang pada sistem, sehingga dapat memperbaiki power faktor dengan maksimal. Dalam menentukan kapasitansi capasitor bank dilakukan terlebih dahulu perhitungan daya reaktif kompensator. Daya reaktif konpensator dibagi dengan banyaknya step VAR kompensator. Daya reaktif kompensator tiap step VAR kompensator digunakan untuk perhitungan kapasitansi capasitor bank tiap step VAR kompensator. Dengan demikian akan didapatkan kapasitansi capasitor untuk tiap step VAR kompensator yang digunakan. Daya reaktif konpensator: Q()* = P × (tan θ, − tan θ ) Keterangan: P : Daya Aktif (watt) Qcap : Daya Reaktif Konpensator(VAR) : sudut sebelum diperbaiki θ1 : sudut setelah diperbaiki θ2 3.2.1. Sensor tegangan Sensor tegangan yang digunakan dalam tugas akhir ini yaitu pembagi tegangan (Voltage Devider). Voltage devider ini digunakan untuk mendeteksi tegangan keluaran sistem yang digunakan pembanding antara arus dan tegangan untuk mengetahui beda fasanya. Sensor tegangan dirancang dengan tegangan output 4.25 volt AC yang mewakili 220 volt AC. Nilai tegangan referensi yang diharapkan yaitu 220 volt AC. Sensor pembagi tegangan yang digunakan menggunakan resistor yang disusun secara seri dengan perhitungan menurut hukum KVL (Kirchof Voltage Low). 3.2.2. sensor arus - 3. KONFIGURASI SISTEM Sensor arus dengan ZCT Sensor arus jenis ZCT (Zero Current Transformer) cara pengoperasiannya dengan cara melilitkan kabel dari 1 fasa yang menuju kebaban pada lingkaran fisik dari ZCT. ZCT akan membaca arus yang mengalir kebeban dengan cara mengeluarkan tegangan AC dari 2 buah kabel keluaran pada ZCT. Pada keluaran ZCT yang berupa tegangan AC ini akan dimasukan ke dalam rangkaian sensor beda fase. Sensor arus dengan ACS Sensor arus yang digunakan adalah sensor arus jenis IC ACS 712. IC ACS 712 ini memiliki kelebihan dibandingkan sensor arus ZCT yakni pada arus yang disensornya. Pada IC ACS 712 dapat menyensor arus AC dan arus DC sedangkan pada ZCT hanya dapat menyensor arus AC saja. Keluaran dari sensor arus jenis IC ACS ini berupa teggangan DC. Pada tegangan keluaran nya apabila tidak dialiri arus minimal 2,5 volt dan maksimal dengan range pembacaan sebesar 30 A yakni tegangan keluarannya sebesar 5 volt DC. Tegangan keluaran pada sensor arus ini akan masuk kedalam port ADC mikrokontroller untuk diproses yang kemudian akan ditampilkan nilai arusnya kedalam LCD grafik Pada perencanaan dan pembuatan perangkat keras rancang bangun alat untuk perbaikan faktor daya pada beban dinamis 1 fase dan monitoring daya dengan lcd grafik mengacu pada blok diagram yang ditunjukkan pada Gambar 3.1 dibawah. Gambar 3.1. Blok diagram rancang bangun alat untuk perbaikan faktor daya pada beban dinamis 1 fase dan monitoring daya dengan lcd grafik Berdasarkan Gambar 3.1 perencanaan dan pembuatan perangkat keras pada Tugas Akhir ini meliputi: 1. Perencanaan dan Pembuatan rangkaian klamper 2. Perencanaan dan pembuatan sensor. 3 3.2.3. Zero Crossing Detector (Detektor Phasa) Menggunakan IC Op-Amp Lm 324 untuk mengubah sinyal tegangan sinusoidal dari sensor tegangan dan sensor arus menjadi sinyal step. Sinyal step dari sensor tegangan dan sensor arus kemudian dimasukkan gerbang logika XOR untuk menghasilkan sinyal step yang menunjukkan nilai beda phasa. Beda fasa atau Cos θ sangat penting dalam perancangan alat tugas akhir ini karena mempengaruhi berapa kapasitor yang aktif untuk mengkompensasi VAR yang dibutuhkan beban agar cos θ nya lebih dari 0,8. Pengujian system menyangkut beberapa hal sebagai berikut: 1. Pengujian sensor. 2. Pengujian monitoring LCD grafik. 3. Pengujian sistem tanpa kapasitor bank dan dengan kapasitor bank Berikut ini adalah gambar panel box system dan gambar rangkaian system yang telah terintegrasi. 10kΩ 10kΩ 3.9kΩ 10kΩ 10kΩ 3.9kΩ Gambar 3.3. Zero Crossing Detector (Detektor Phasa) 3.2.4. Soft switch dengan Thyristor Gambar 3.4 Soft switch dengan thyristor triac BTA12 Gambar 4.1. Panel Box system Pada gambar diatas dapat dilihat bahwa pin 2 pada optocoupler diberi inputan aktif high dari mikrokontroller sebagai trigger agar gate terbuka, sehingga tegangan dari pin 6 dapat melewati pin 4. Tegangan tersebut digunakan untuk mentrigger gate pada thyristor agar kapasitor bank yang dipasang secara parallel dapat bekerja atau mengkompensasi daya reaktif untuk memperbaiki cos θ pada beban. 3.2.5. Perencanaan capacitor bank Target yang diinginkan dalam perancangan kapasitor bank yakni dengan cos phi 0,99. Menentukna target dengan cos phi 0,99 dikarenakan pada kapasitor yang ada dipasaran memiliki toleransi sebesar 1 05% dan nilai toleransi kapasitor tertera pada body kapasitornya. Sehingga dalam perancangan memaksimalkan dengan cos phi 0,99. Pada pembuatan alat ini memiliki target cos phi > 0,9. Perencanaan dan pembuatan mikrokontroller dan display. Perencanaan dan pembuatan mikrokontroller sangatlah penting dikarenakan fun gsi dari mikrokontoler pada proyek ini yakni sebangai pengatur pengaktifan dari capasitor bank , dan juga menampilkan informasi pada LCD. IC mikrokontroller yang digunakan pada proyek akhir ini adalah ATMEGA 128 dan LCD yang digunakan yakni jenis LCD grafik 128x64 sebagai alat monitoringnya. Berikut ini adalah perencanan dan pembuatan dari mikrokontroller dan display. Gambar 4.2. Sistem yang terintegrasi 3.3. 4.1. Pengujian rangkaian sensor Pengujian sensor meliputi pengujian sensor tegangan, sensor arus dan pengujian sensor phasa detektor. Pengujian sensor tegangan dan sensor arus dilakukan secara bergantian. Pengujian sensor beda fase merupakan integrasi sensor arus, sensor tegangan dan masuk ke rangkaian phasa detektor, sehingga didapat nilai cos phinya. 4. PENGUJIAN DAN ANALISIS 4.1.1. Sensor tegangan Pada Bab IV dibahas tentang pengujian terhadap system yang dibangun disertai dengan analisa. Berikut ini adalah gambar dari sensor tegangan yang telah dibuat : Gambar 4.3. Sensor Tegangan Gambar 4.6. Keluaran gelombang tegangan ZCT. Time/div = 5ms; volt/div =50 volt; Sensor tegangan diuji dengan memberikan tegangan variable dari variac AC 1 fase. Berikut adalah tebel pengujian dari sensor tegangan. Pengujian sensor arus ZCT menggunakan beban resistor variable dan dengan variac 1 fase.berikut ini adalah data dari pengujian sensor arus ZCT. Tabel 4.1. pengujian sensor tegangan keluaran AC No. Vin ( volt ) AC Vout (Volt) AC 1 50.3 1.020 2 100.6 2.054 3 150.2 3.025 4 200.7 4.11 Tabel 4.2 Pengujian sensor arus ZCT Dari hasil pengujian telah didibuktikan bahwa sensor tegangan dapat digunakan untuk masuk kedalam sensor beda fasa . - ADC 1 2 3 4 5 6 7 8 9 10 20.6 49.5 67 85.9 105 147 189 232 277 319 0.020 0.023 0.026 0.029 0.032 0.038 0.044 0.050 0.057 0.063 Penguat Non inverting 25 kali (volt) 0.497 0.576 0.650 0.709 0.776 0.933 1.080 1.230 1.396 1.544 Pembacaan arus Amperemeter (Ampere) Pembacaan Arus di LCD (Ampere) 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0.21 0.41 0.61 0.81 1 1.2 1.4 1.6 1.82 2.02 Dari tabel 4.2 dapat disimpulkan bahwa pada sensor arus ZCT memiliki keluaran tegangan yang sangat kecil. Tegangan keluaran pada ZCT dengan pengujian tanpa lilitan pada body ZCT tegangan yang terbaca dengan arus yang mengalir 0,2 Ampere sebesar 0,02 volt. Dengan penguat 25 kali maka tegangannya menjadi 0,497 volt untuk pembacaan ADCnya yakni 20,6 kemudian penampilan pembacaan arus pada LCD grafik yakni 0,21 ampere. Persen error dari pembacaan arus 0,2 amprere yakni sebesar 5%. Dari pengujian sensor arus ini pada range pembacaan 1 ampere samapi dengan 1,6 ampere memeiliki persentase error pada pembacaan ampere meter analog dibandingkan dengan pembacaan di LCD grafik yakni sebesar 0%. kemudian pembacaan pada arus 1,8 ampere dan 2 ampere memilikin persen error 1,1% dan 1 %. Kesimpulan dari hasil pengujian sensor arus ZCT ini yeng memiliki persen error yang tinggi pada pembacaan arus 0,2 ampere dengan error sebesar 5%. Gambar 4.4. Keluaran dari sensor tegangan AC Time/div = 5ms; volt/div =50 volt; 4.1.2. no Tegangan keluaran ZCT (Volt) Sensor arus Pengujian sensor arus ZCT Sensor arus yang digunakan pada proyek akhir ini yakni jenis sensor ZCT dan ACS. Tegangan keluaran pada ZCT dari hasil pembacaan arus yang mengalir kebeban berupa tegangan AC.. Berikut ini adalah gambar dari sensor arus yang telah dibuat : Gambar 4.5. Bentuk model sensor arus ZCT. 5 E Pem 1 A 2.5 C 2 amapere B meter analog 1.5 D 1 E LCD grafik Gambar 4.8 Zero Crossing Detector (Detektor Phasa) 0.5 Keterangan pada gambar 4.8 : 0 - A = titik A (gelombang sinyal keluaran sensor tegangan) Gambar 4.7. Grafik pengujian sensor arus ZCT - Pada gambar 4.7 menununjukkan grafik perbandingan antara pembacaan arus pada amapere meter analog dan pembacaan di LCD grafik. B = titik B (gelombang sinyal keluaran sensor arus) - C = titik C (sinyal step tegangan) - D = titik D (sinyal step arus) Berikut adalah listing progam dari pembacaan sensor arus dengan menggunakan bahasa visual C++: - E = titik E ( sinyal beda fasa) 0 5 10 15 temp0=0; for(j=0;j<1000;j++)temp0=temp0+read_adc(0); temp0=(temp0/1000); if(temp0<105) { arus=(temp0/105); } else { temp=(temp0-105); temp1=(temp/209); arus=temp1+1; } 4.1.3. Rangkaian Zero Crossing Dan Phasa Detector (Sensor cos phi) Rangkaian zero crossing dan phasa detector merupakan kelanjutan sensor arus dan sensor tegangan, Kemudian diolah oleh IC-XOR dan menghasilkan sinyal step yang menginformasikan data beda fasa antara tegangan dan arus. IC-XOR digunakan sebagai pembanding dari 2 sinyal input yaitu sinyal arus dan tegangan yang merupakan keluaran dari zero crossing yang mempunyai beda phasa, seperti yang telah diketahui bahwa IC-XOR memiliki cara kerja sebagai berikut: 1. Jika kedua input berlogika sama maka output akan bernilai logika "0". Gelombang Sinyal tegangan Gelombang Sinyal arus Gambar 4.9 Masukan pada rangakain zero crossing detector Time/div = 5ms; volt/div =0,2volt; Pada gambar 4.9 menunjukkan gambar dari sinyal tegangan keluaran dari sensor tegangan yang diambil dari titik A pada gambar 4.8 dan sinyal arus keluaran dari sensor arus yang diambil dari titik B pada gambar 4.8. Untuk gelombang sinyal tegangan yang memiliki amplitudo yang besar dan untuk gelombang sinyal arus memuiliki amplitudo yang kecil. Pengambilan data ini melakukan pengujian dengan beban motor pompa dengan cos phi motor pompa yakni 0,66 lagging. Sinyal step tegan 2. Jika kedua input berlogika tidak sama maka output akan bernilai logika "1". Sinyal gelombang kotak yang keluar dari zero crossing arus dan tegangan masuk ke rangkaian komparator untuk dibandingkan dengan menggunakan IC TTL XOR 74LS86 sehingga diketahui perbedaan sudut phase antara tegangan dan arus mengalir pada beban. Sinyal step arus Gambar 4.10 Keluaran pada ragkaian zero crossing detector Time/div = 5ms; volt/div =10volt; Pada gambar 4.10 yakni gelombang sinyal tegangan dan arus yang telah dirubah bentuk sinyal step. Sinyal step pada tegangan diambil dari titik C pada gambar 4.8 dan sinyal step arus diambil dari titik D pada gambar 4.8. Pada gambar 4.10 terlihat jelas perbedaan sudut fasa antara sinyal tegangan dan arus. Kedua buah sinyal ini akan masuk ke rangkaian fase detector untuk diambil diketahui berapa derajat perbedaan antara fase tegangan dan fase arusnya 4.2. Pengujian monitoring LCD grafik. Pengujian LCD Grafik menggunakan program yang telah dibuat. Program lcd grafik menggunakan basaha C dengan software code vision. Sinyal beda fasa Gambar 4.11 Keluaran dari rangkaian fese detector Time/div = 5ms; volt/div =10 volt; Pada gambar 4.11 yakni bentuk gelombang sinyal beda fase hasil dari perbandingan sinyal arus dan tegangan. Sinyal step diambil dari titik E pada gambar 4.8. Sinyal beda fase masuk ke port f bit 2 pada mikrokontroller AT Mega 128 yang kemudian dibaca nilai lebar pulsa yang berlogika 1 atau high dari sinyal beda fase tersebut kemudian nilai itu dikonversi kedalam nilai derajat setelah itu dikonversi kedalam nilai cos phi. Berikut adalah listing program dari pembacaan cos phi : void baca_CP(void) { unsigned char counter=0; while(PINF.2==1); while(PINF.2==0); while(1) { counter++; delay_ms(1); if (!PINF.2) break; } while(PINF.2==0); while(1) { counter++; delay_ms(1); if (!PINF.2) break; } cos_phi=(counter/20.0)*360; //phi=phi/20ms * 360 cos_phi=cos(cos_phi); cos_phi=fabs(cos_phi); } Dari pengertian program cos phi ini yakni membaca pulsa dengan menggunakan counter yang membaca apabila pulsa berlogika 1. Pembacaan tersebut dilakukan setiap waktu 1 ms. Apabila sinyal kotak berlogika low atau 0 maka counter akan berhenti berjalan kemudian hasil pembacaan counter akan diteruskan untuk konversi kedalam nilai cos phi. Dan kemudian akan ditampilkan pada LCD grafik. (a) (b) Gambar 4.12. (a) Pengujian LCD grafik untuk measurement (b) Pengujian LCD grafik untuk nilai ADC dan bentuk grafik Pengujian ini dilakukan untuk mengetahui kelayakan dari LCD grafik dalam menampilkan suatu perintah dari mikrokontroller untuk menampilkan tampilan yang telah diprogram. Program untuk menampilkan measurement sebagai berikut void measurement(void) { initlcd(); bersih(); sTeks(0,5,tNAME,15); sTeks(2,0,tvolt,10); sTeks(3,0,tampere,12); sTeks(4,0,twatt,11); sTeks(5,0,tcosphi,8); while(1) { baca_sensor(); ftoa(tegangan,3,mystr); sTeks(2,15,mystr,3); ftoa(arus,4,mystr); sTeks(3,15,mystr,4); baca_CP(); ftoa(cos_phi,4,mystr); sTeks(5,65,mystr,4); ftoa(daya,5,mystr); sTeks(4,15,mystr,5); if (cos_phi <0.5) Tabel 4.3 Pengujian sistem Tanpa Kapasitor {sTeks(6,0,tled,7); } if (cos_phi >0.5) {sTeks(6,0,tlag,7); } }; Program untuk menampilkan grafik sebagai berikut : void grafik(void) { initlcd(); bersih(); sTeks(0,0,twatt,11); while(1) { baca_sensor(); baca_CP(); ftoa(daya,5,mystr); sTeks(0,15,mystr,5); fp=daya/10; ip2=floor(fp); // integer pembulatan kebawah for (i=0;i<127;i++) {data[i]=data[i+1];} No 1 2 4 Nama beban Motor pompa kulkas Kulkas dan motor pompa V (Volt) I (ampere) 224 (Fluke meter) 1 (Fluke meter) 1 224 (lcd ) 224 (Fluke meter) 224 (lcd ) 224 (Fluke meter) 224 (lcd ) (lcd ) 0.77 (Fluke meter) 0.78 (lcd ) 1.81 (Fluke meter) 1.82 (lcd ) Cos phi 0.66 lag (Fluke meter) 0.64 lag (lcd ) 0.68 lag (Fluke meter) 0.67 lag (lcd ) 0.71 lag (Fluke meter) 0.70 lag (lcd ) P (Watt) 150 (Fluke meter) S (VA) % C 220 143.3 (lcd ) 116 (Fluke meter) 115.3 170 1 (lcd ) 280 (Fluke meter) 285.3 410 1 Cos phi P (Watt) S (V 0.91 lag (Fluke meter) 139 0.89 lag (lcd ) 139m.5 0.94 lag (Fluke meter) 118 0.94 lag (lcd ) 122.1 0.96 lag (Fluke meter) 356 0.96 lag (lcd ) 359.1 (lcd ) pada tabel 4.5 dari pengujian sistem tanpa kapasitor dapat dilihat bahwa untuk pembacaan cos phi pada lcd grafik dibandingkan dengan pembacaan cosphi pada fluk meter memiliki % error yang tinggi pada pembacaan cos phi dengan % error sebesar 3%. Sedangkan pada pembacaan cos phi pada dengan persen error yang rendah mencapai 1,4 %. //A.geser 1 titik ke kiri data[127]=ip2; //A.dapatkan titik baru di ujung kanan bersihbawah(3); for (i=0; i<127;i++) // A & B {titik(i,data[i]); } //A & B tampilkan titik Tabel 4.4 Hasil Pengujian sistem dengan Kapasitor }; Nama beban Dengan pemakaian Kapasitor (uF) Motor pompa 10 uf Dengan toleransi 1 05% } No 4.3. Pengujian system tanpa kapasitor bank dan dengan kapasitor bank Dalam pengujian ini dilakukan untuk mengetahui nilai daya, arus, tegangan, dan cos phi pada beban yang1 dpakai. Beban yang digunakan berupa kulkas , AC dan motor pompa. Pada tugas akhir ini target diatas 0.9. tetapi perancangan kapasitor dengan target 0,99 dikarenakan pada kapasitor yang ada memiliki toleransi 2 faradnya sekitar 1 05% dengan adanya toleransi itu maka perancangan dimaksimalkan. kulkas Motor pompa dan kulkas 3 8 uf Dengan toleransi 1 05% 18 uf Dengan toleransi 1 05% V (Volt) I (ampere) 224 (Fluke meter) 224 (lcd ) 0.69 (Fluke meter) 224 (Fluke meter) 224 (lcd ) 224 (Fluke meter) 224 (lcd ) 0.70 (lcd ) 0.56 (Fluke meter) 0.58 (lcd ) 1.66 (Fluke meter) 1.67 (lcd ) Dari tabel 4.6 hasil pengujian sistem dengan menggunakan kapasitor dapat disimpulkan bahwa dengan perencanaan kapasitor bank untuk target cos phi 0,99 namun untuk data yang didapatkan dari pengujian yakni pada beban motor pompa menjadi cos phi 0,91 lag. hal ini membukitkan bahwa untuk nilai farad yang terkandung dalam kapasitor tidak sebenarnya yang tertera pada label dari bodi kapasitor tersebut dan memiliki toleransinya. Gambar 4.13 Kapasitor bank Pada tabel 4.5 Berikut adalah hasil dari pengujian yang dilakukan. Untuk persen error pada cos phi perancangan dengan cos phi hasil pengujian. 8 15 12 36 [6] Epcos,”Damping of Inrush Current in Low- Pada motor pompa : 5364789:; − 5364<:=> % 23 cos 4 = ?100% 5364789:; Voltage PFC Equipment”, Aplication Note, 2001. [7] Atmel,”8-bit AVR Microcontroller with 16K Bytes In-System Programmable Flash”, Atmega16 datasheet, 2002 [8] www.electroniclab.com/index.php?option=com_c ontent&view=article&id=12:thyristor&catid=6:elka dasar&Itemid=7 0.99 − 0.91 ?100% % 23 5 cos 4 = 0.99 % 23 536 4 = 8.08 % Untuk konsumsi arusnya berkurang dari 1 ampere menjadi 0,69 ampere sehingga pada daya semu juga berkurang dari 220 VA menjadi 159 VA. Pada motor kulkas : 5364789:; − 5364<:=> % 23 cos 4 = ?100% 5364789:; % 23 5 cos 4 = 0.99 − 0.94 ?100% 0.99 % 23 536 4 = 5.05 % Untuk konsumsi arusnya berkurang dari 0.78 ampere menjadi 0,56 ampere sehingga pada daya semu juga berkurang dari 170 VA menjadi 124 VA. Pada motor pompa dan kulkas : % 23 cos 4 = 5364789:; − 5364<:=> ?100% 5364789:; % 23 5 cos 4 = 0.99 − 0.96 ?100% 0.99 % 23 536 4 = 3.03 % Untuk konsumsi arusnya berkurang dari 0.78 ampere menjadi 0,56 ampere sehingga pada daya semu juga berkurang dari 410 VA menjadi 355 VA. Pada beban rumah tangga meskipun diberi denda dengan buruknya cos phi tetapi bertujuan untuk meningkatkan efisensi penggunaan beban rumah tangga, sehingga memaksimalkan pada pemakaian dayanya. tidak disini pada bisa DAFTAR PUSTAKA [1] Achmad [2] [3] [4] [5] Fanani, ”Power faktor Regulator Mengunakan PLC(HARDWARE)”, Proyek Akhir PENS – ITS, 2001. Rety Silvana, Florentina, ”Perbaikan Kualitas Daya menggunakan Soft Switch Static Var Kompensator untuk beban dinamik pada industri”, PENS-ITS, Surabaya, 2006. Indhana Sudiharto, ST, MT, ”Desain Soft Switched Static Var Compensator Untuk Mengurangi Inrush Current Pada Capasitor Bank”, Tesis Teknologi Industri – ITS, 2006. Arif, Faisyal, ”Power Faktor Regulator menggunakan PLC Zelio”, PENS-ITS, Surabaya, 2007. Allegro MicroSystems,”Fully Interated, Hall Effect-Base Linear Current Sensor IC with 2.1 kVRMS Isolation and a Low-Resistance Current Conduktor”, ACS712, 2006-2009. 9