rancang bangun modul boost chopper 48 – 250 volt dc 200 watt
advertisement

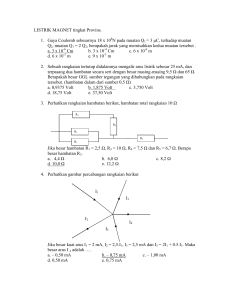
RANCANG BANGUN MODUL BOOST CHOPPER 48 – 250 VOLT DC 200 WATT BERBASIS MIKROKONTROLLER ATMEGA 16 *Ali Safarudin **Baisrum, Drs.,SST.,M.Eng **Kartono Wijayanto, Drs.,ST.,MT. * Mahasiswa Teknik Listrik Politeknik Negeri Bandung ** Dosen Teknik Listrik Politeknik Negeri Bandung ABSTRAK Boost chopper adalah suatu konverter untuk menaikkan tegangan DC ke DC sesuai kebutuhan beban. Boost chopper ini menghasilkan tegangan keluaran sebesar 250 Volt DC dari tegangan masukan 48 Volt DC dan mampu mensuplai beban 200 Watt. Untuk menghasilkan tegangan keluaran DC yang diinginkan yaitu dengan cara pengaturan switching pwm dimana komponen yang digunakan sebagai switch tersebut adalah MOSFET yang disulut oleh mikrokontroller atmega 16 dengan menggunakan software Bascom AVR dalam pembuatan programnya. Boost chopper ini diuji dengan beban lampu pijar dari beban 15 Watt hingga 200 Watt. Dari sistem ini didapatkan hasil yaitu pada kondisi tanpa beban dapat menaikkan tegangan dari 48 Volt DC menjadi 253 Volt DC, efisiensi rata-rata sebesar 91,68 %. Pada saat kondisi beban maksimum dapat menaikkan tegangan dari 48 Volt DC menjadi 195 Volt DC dengan efisiensi 95,58 %, dan regulasi tegangan sebesar 29,74 %. Kata Kunci : Boost Chopper, MOSFET, Switch PWM, Mikrokontroler atmega 16 BAB I PENDAHULUAN 1. Pendahuluan 1.1 Latar Belakang Masalah Energi merupakan aspek kehidupan yang kini menjadi sorotan manusia di seluruh dunia. Semakin menipisnya cadangan minyak bumi sebagai bahan bakar utama menyadarkan manusia untuk segera mencari alternatif pengganti yang bersifat terbarukan dan juga lebih ramah lingkungan. Pada saat ini energi matahari menjadi salah satu sumber energi alternatif yang potensial untuk membantu memenuhi kebutuhan energi. Pada sistem ini, energi listrik yang dihasilkan berasal dari solar sel yang mempunyai fungsi mengubah energi matahari energi listrik yang kemudian akan disimpan pada baterai. Selain itu pada tugas akhir ini bertujuan untuk memenuhi modul praktikum di laboratorium yang tidak lengkap, sehingga untuk memenuhi kebutuhan tersebut penulis mengambil judul untuk memenuhi kebutuhan di atas penulis mengambil judul untuk proyek akhir “Rancang Bangun Modul Boost Chopper 48 - 250 Volt DC 200 Watt Berbasis Mikrokontroller Atmega 16”. Dengan alat ini diharapkan dapat menjadi panduan belajar dan analisis untuk kedepannya dapat dikembangkan oleh mahasiswa generasi selanjutnya. Salah satu kekurangan pada sistem pembangkit solar sel adalah mahalnya harga dari solar sel tersebut dan tegangan yang dihasilkan berkisar 16-20 Volt DC untuk satu panel solar sel. Dengan perkembangan elektronika daya dan sistem kontrol pada saat ini sehingga dapat mengatasi kekurangan tersebut dengan membuat suatu alat yang dapat menaikkan tegangan DC yaitu DC chopper. 1.2 Tujuan Dalam laporan tugas akhir ini, penulis membuat beberapa tujuan yang menjadi dasar penulis antara lain : 1) Dapat mengetahui permasalahan dalam rancang bangun boost chopper berbasis mikrokontroller. 2) Dapat mengetahui unjuk kerja kerja dari boost chopper 48 - 250 Volt DC. 3) Dapat mengetahui kelebihan dan kekurangan boost chopper 1.3 Perumusan Masalah Dalam penyusunan proyek akhir ini akan dibahas beberapa masalah yang menyangkut boost chopper ini. Ada beberapa rumusan masalah yang akan dikemukakan oleh penulis anatar lain : 1) Bagaimana merancang rangkaian boost chopper yang sesuai dengan spesifikasi yang dikehendaki? 2) Bagaimana membangun dan mengimplementsikan modul boost chopper berbasis mikrokontroller? 3) Bagaimana menguji unjuk kerja modul boost chopper berbasis mikrokontroller? 1.4 Batasan Masalah Dalam pembuatan proyek tugas akhir ini, penulis tidak membahas secara terperinci, tetapi penulis mencoba untuk membahas bagian tertentu saja dari proyek tugas akhir, karena banyaknya permasalahan. Maka penulis membatasi pada beberapa masalah, yaitu: 1) Tegangan masukan 48 Volt DC, tegangan keluaran 250 Volt DC dengan daya 200 Watt 2) Teknik switching pulse width modulation (PWM) dengan berbasis mikrokontroller. 3) Komponen switching menggunakan MOSFET. BAB II DASAR TEORI 2.1. Rangkaian Daya Boost Chopper 2.1.1. Pendahuluan Pengubah daya DC-DC (DC-DC converter) tipe peralihan atau dikenal juga dengan sebutan DC chopper dimanfaatkan terutama untuk penyediaan tegangan keluaran DC yang bervariasi besarannya sesuai dengan permintaan pada beban. Daya masukan dari proses DC-DC tersebut adalah berasal dari sumber daya DC yang biasanya memiliki tegangan masukan yang tetap. Pada dasarnya, penghasilan tegangan keluaran DC yang ingin dicapai adalah dengan cara pengaturan lamanya waktu penghubungan antara sisi keluaran dan sisi masukan pada rangkaian yang sama. Komponen yang digunakan untuk menjalankan fungsi penghubung tersebut tidak lain adalah saklar (solid state electronic switch) seperti misalnya thyristor, MOSFET, IGBT, GTO. Secara umum ada dua fungsi pengoperasian dari DC chopper yaitu penaikan tegangan dimana tegangan keluaran yang dihasilkan lebih tinggi dari tegangan masukan, dan penurunan tegangan dimana tegangan keluaran lebih rendah dari tegangan masukan. Untuk lebih memahami keuntungan dari tipe peralihan, kita lihat kembali prinsip pengubahan daya DC-DC tipe linier seperti terlihat pada gambar 2.1. Pada tipe linier, pengaturan tegangan keluaran dicapai dengan menyesuaikan arus pada beban yang besarannya tergantung dari besar arus pada base-nya transistor. Gambar 2.1 Rangkaian ekivalen pengubah tipe linier Secara matematis tegangan keluaran dari gambar 2.1 dapat ditulis : 𝑉𝑂 = 𝐼𝐿 . 𝑅𝐿 ………………......………………(2.1) Dengan demikian pada tipe linier, fungsi transistor menyerupai tahanan yang dapat diubahubah besarannya seperti yang juga terlihat dalam gambar 2.1. Lebih jauh lagi, transistor yang digunakan hanya dapat dioperasikan pada batasan liniernya (linear region) dan tidak melebihi batasan cut off dan selebihnya (saturation region). Maka dari itu tipe ini dikenal dengan tipe linier. Walau tipe linier merupakan cara termudah untuk mencapai tegangan keluaran yang bervariasi, namun kurang diminati pada aplikasi daya karena tingginya daya yang hilang (powerloss) pada transistor (VCE*IL) sehingga berakibat rendahnya efisiensi. Sebagai alternatif untuk meminimalisir powerloss, maka muncul tipe peralihan yang pada prinsipnya dapat dilihat Pada gambar 2.2. Gambar 2.2 Rangkaian ekivalen pengubah tipe peralihan Pada tipe peralihan, terlihat fungsi transistor sebagai electronic switch yang dapat dibuka (off) dan ditutup (on). Dengan asumsi bahwa saklar tersebut ideal, jika saklar ditutup maka tegangan keluaran akan sama dengan tegangan masukan, sedangkan jika switch dibuka maka tegangan keluaran akan menjadi nol. Dengan demikian tegangan keluaran yang dihasilkan akan berbentuk pulsa seperti pada gambar 2.3. Tegangan keluaran Gambar 2.3. Besaran rata rata atau komponen DC dari tegangan keluaran dapat diturunkan dari persamaan berikut: 𝐷𝑇 1 𝑇 𝑉𝑂 = 𝑇 0 𝑉𝑂 𝑡 𝑑𝑡 = 0 𝑉𝑖𝑛 𝑑𝑡 = 𝑉𝑖𝑛 . 𝐷…(2.2) Dari persamaan 2.2 terlihat bahwa tegangan keluaran DC dapat diatur besarannya dengan menyesuaikan parameter D. Parameter D dikenal sebagai duty cycle yaitu rasio antara lamanya waktu switch ditutup (ton)dengan perioda T dari pulsa tegangan keluaran (gambar 2.3), secara matematis dapat ditulis sebagai berikut: 𝐷= 𝑡 𝑜𝑛 𝑡 𝑜𝑛 +𝑡 𝑜𝑓𝑓 = 𝑡 𝑜𝑛 𝑇 Untuk mendapatkan chopper yang dapat menaikan tegangan (boost chopper) dapat dibuat rangkaian seperti pada gambar 2.4. Cara kerja rangkaian dapat dibedakan menjadi dua moda. Moda 1 terjadi ketika MOSFET dalam kondisi konduksi (on) saat t = 0, dioda terbias mundur sehingga tegangan keluaran Vo sama dengan tegangan kapasitor. Besar arus masukan mengalir melalui induktor L dan MOSFET. Mode 2 dimulai ketika MOSFET dalam kondisi tidak konduksi (off) saat t = 1. Arus masukan yang semula mengalir melalui saklar sekarang mengalir melalui L, C, dioda D dan beban RL. Arus induktor turun sampai MOSFET konduksi lagi pada siklus berikutnya. Energi yang tersimpan dalam induktor disalurkan ke beban. Bila konstanta waktu RC jauh lebih besar dari perioda penyaklaran MOSFET, maka tegangan Vo akan menjadi tetap. Rangkaian ekivalen dari moda 1 dan moda 2 diperlihatkan pada gambar 2.5 dan gambar 2.6 . = 𝑡𝑜𝑛 . 𝑓…………….(2.3) Dengan 0 D 1. Parameter f adalah frekuensi peralihan (switching frequency) yang digunakan dalam mengoperasikan saklar. Berbeda dengan tipe linier, pada tipe peralihan tidak ada daya yang diserap pada transistor sebagai saklar. Ini dimungkinkan karena pada waktu saklar ditutup tidak ada tegangan yang jatuh pada transistor, sedangkan pada waktu saklar dibuka, tidak ada arus listrik mengalir. Ini berarti semua daya terserap pada beban, sehingga efisiensi daya menjadi 100%. Namun perlu diingat pada prakteknya, tidak ada saklar yang ideal, sehingga akan tetap ada daya yang hilang sekecil apapun pada komponen saklar dan efisiensinya walaupun sangat tinggi, tidak pernah mencapai 100%. 2. 1.2. Pengubah boost Jika tegangan keluaran yang dinginkan lebih besar dari tegangan masukan, maka rangkaian boost dapat dipakai. Gambar 2.5 Rangkaian ekivalen moda 1 Dari gambar 2.5 ketika MOSFET on (t1) maka untuk perhitungan arus pada induktor adalah sebagai berikut: 𝑑𝑖 𝑑𝑡 = 𝑉𝑖𝑛 𝐿 ……………………………………..(2.4) Gambar 2.6 Rangkaian ekivalen moda 2 Dari gambar 2.6 ketika MOSFET off (t 2) maka untuk perhitungan arus pada induktor adalah sebagai berikut: 𝑑𝑖 𝑑𝑡 = 𝑉𝑖𝑛 −𝑉 𝑐 𝐿 ………………………………….(2.5) Dimana 𝑉𝑐 adalah tegangan pada kapasitor. Bentuk gelombang tegangan dan arus pada kondisi kontinyu diperlihatkan pada gambar 2.7. Gambar 2.4 Pengubah boost dan ini memberikan arus rippel puncak ke puncak ; 𝛥𝐼 = 1 𝑡1 𝐼 𝑐 0 𝑜 𝛥𝐶 = Gambar 2.7 Bentuk gelombang arus dan tegangan pada inductor Dengan mengasumsikan arus induktor naik secara linier dari I1 ke I2 pada waktu t1,maka : 𝐼2− 𝐼 1 𝐼1 =𝐿 𝛥𝐼 𝑡1 ……………………….(2.6) 𝛥𝐼 𝑡2 …………………………………..(2.8) Atau −𝛥𝐼 𝐿 𝑡2 = 𝑉𝑜 − 𝑉𝑖𝑛 ………………………………...(2.9) dengan ΔI = I2 - I1 adalah arus rippel ke puncak induktor L. Dari persamaan (2.6) dan (2.7) didapatkan : 𝑉𝑜 = 𝑉𝑖𝑛 𝑇 𝑡2 = 𝑉𝑖𝑛 1−𝐷 (2.10) Dengan mengasumsikan rangkaian yang tidak mengandung rugi-rugi Vin 𝐼𝑖𝑛 = 𝑉𝑜 𝐼𝑜 = 𝑉𝑖𝑛 𝐼𝑜 D / (1 – D) dan arus masukan rata-rata 𝐼𝑖𝑛 memiliki hubungan dengan arus keluaran rata-rata Io sebagai berikut : 𝐼𝑖𝑛 = 𝐼𝑜 . 𝐷 (2.11) Periode pensaklaran T dapat ditentukan dari : 𝑇= = 1−𝐷 1 = 𝑡1 𝑓 𝛥𝐼 𝐿 𝑉𝑜 + 𝑡2 = 𝑉𝑖𝑛 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝐼𝑜 𝑡1 𝐶 𝛥𝐼 𝐿 - 𝛥𝐼 𝐿 𝑉𝑖𝑛 𝑉𝑜 − 𝑉𝑖𝑛 ………………………………………(2.12) 𝐼𝑜 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝑓 𝐶 𝑉𝑜 ………………………….(2.15) BAB III PERANCANGAN DAN REALISASI ALAT ……………………………………..(2.7) dan arus induktor turun secara linier dari I 1 ke I2 pada waktu t , maka : 𝑉𝑜 = −𝐿 𝑑𝑡= Karena boost chopper hanya menggunakan satu transistor, maka mempunyai efisiensi yang tinggi. Meskipun demikian arus puncak yang tinggi mengalir melalui transistor. Tegangan keluarannya sangat sensitif terhadap siklus kerja (D). Dan karena transistor dihubungkan paralel dengan beban, akan sulit memproteksi rangkaian keluaran terhadap masalah hubung singkat. Atau 𝑉𝑖𝑛 𝑐 Persamaan (2.10) memberikan t 1 = (𝑉𝑜 − 𝑉𝑖𝑛 ) / (𝑉𝑜 f ) dan persamaan (2.14) menjadi : 𝛥𝐼 𝐿 ………………………..(2.13) ……………………………………….(2.14) 𝑡1 = 𝑓 𝐿 𝑉𝑜 Pada saat transistor sedang on, kapasitor mencatu arus beban selama t = t1. Arus kapasitor rata-rata selama waktu t 1 adalah I c = Io dan tegangan rippel puncak ke puncak kapasitor adalah : 1 𝑡 𝛥𝑉𝑐 = 𝑉𝑐 − 𝑉𝑐 𝑡 = 0 = 0 1 𝐼𝑐 𝑑𝑡 = 𝑉𝑖𝑛 = 𝐿 𝑉𝑖𝑛 (𝑉𝑜 − 𝑉𝑖𝑛 ) 3.1 Pendahuluan Perancangan adalah proses menuangkan sebuah pemikiran atau gagasan berdasarkan teoriteori yang mendukungnya. Perancangan juga dapat didefinisikan sebagai proses penerapan berbagai teknik dan prinsip dengan tujuan untuk mentransformasikan hasil analisis ke dalam bentuk yang memudahkan pengimplementasian. 3.2 Tahapan Perancangan Tahapan perancangan merupakan tahap yang paling penting dalam merealisasikan suatu alat yang akan dibuat. Dalam perancangan alat ini terdapat beberapa tahapan yang akan dilaksanakan seperti ditunjukan pada diagram alir dibawah ini: 1) 2) 3) 4) 5) 6) Menentukan spesifikasi peralatan. Membuat diagram blok sistem. Merancang perangkat keras dan lunak. Merealisasikan perangkat keras dan lunak. Pengujian perangkar keras dan lunak. Pengujian sistem. 3.3 Tujuan Perancangan Tujuan dilakukannya perancangan ialah untuk mendapatkan alat yang sesuai dengan spesifikasi yang diinginkan. Proses perancangan dilakukan agar proses realisasi lebih mudah dan terstruktur, sehingga dapat meminimalisasi kesalahan dan kerugian waktu serta materil. Perancangan dalam suatu sistem juga bertujuan untuk mendapatkan rangkaian yang sesederhana mungkin dan sesuai dengan spesifikasi alat atau sistem yang diinginkan. Gambar 3.1 adalah diagram alir proses perancangan dan pembuatan alat pada proyek akhir ini. 3.5. Rangkaian Daya Spesifikasi alat yang dirancang: Vin = 48 Volt Vo = 250 Volt Io = 0,8 Ampere (200 Watt) V ripple = 5% I ripple = 5% Frekuensi yang ditetapkan = 7,404 KHz Jadi ΔV = 5% x 250 V = 12,5 V ΔI = 5% x 0,8A = 0,04 A 3.5.1 Perhitungan rangkaian daya Perhitungan pada rangkaian daya ini dimaksudkan agar dalam pemilihan komponen yang akan dipergunakan tidak salah. Karena komponen yang akan digunakan dicocokan dulu dengan data hasil perhitungan untuk masingmasing komponen demi mencapai output sesuai dengan yang diinginkan. Adapun perhitungannya adalah: Siklus kerja yang diperlukan mengacu pada persamaan (2.10) : 𝑉𝑜 = 𝑉𝑖𝑛 1−𝐷 1−𝐷= 𝑉𝑖𝑛 48 = 0,192 250 Maka D = 1 - 0,0192 = 0,808 atau 80,8 % 𝑉𝑜 = Arus sumber yang dibutuhkan mengacu pada persamaan (2.11) : Iin= 𝐼𝑜 (1−𝐷) 0,8 , (1 – 0,808) = Iin Iin 0,8 Maka Iin = = 4,16 A 0,192 (1-D) = Gambar 3.1 Flowchart / diagram alir perancangan 3.4. Blok Diagram Sebelum membuat alat yang direalisasikan, untuk memudahkan maka diperlukan blok diagram. Adapun gambar dari blok diagram pada gambar 3.2. Gambar 3.2 Blok diagram perancangan 𝐼𝑜. 3.5.2 Pemilihan MOSFET Untuk komponen switching yaitu dari jenis MOSFET penulis mementukan spesifikasi sebagai berikut: 1) Memiliki nilai Vds = lebih dari (Vo + 20%) (Faktor keamanan untuk komponen tersebut) Maka diperoleh nilai Vds ≥ (250 + 20%) Vds ≥ 300 V 2) Memiliki nilai Ids = lebih dari (Is + 20%) (Faktor keamanan untuk komponen tersebut) Maka diperoleh nilai Ids ≥ (4,16 + 20%) Ids ≥ 4,992 A Dalam pemilihan MOSFET ini penulis membandingkan antara MOSFET yang satu dengan yang lainnya mengacu pada perhitungan diatas. Dan akhirnya penulis menemukan tipe MOSFET yang sesuai dengan rangkaian yaitu MOSFET dengan seri IRFP 460 dengan spesifikasi sebagai berikut: Vds = 500V Ids = 20A Rds (on) = 0,85 Ω Min Vgs (th) = 4V Max Vgs (th) = 20V 3.5.3 Pemilihan induktor Perhitungan Induktor yang akan digunakan mengacu pada persamaan (2.13) : 𝑉𝑖𝑛 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝛥𝐼 = 𝑓 𝐿 𝑉𝑜 𝐿= 𝑉𝑖𝑛 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝑓 𝛥𝐼 𝑉𝑜 Maka L = 48 (250−48) 7404.0,04 .250 = 130,956 mH Jadi induktor yang digunakan sebesar 130,956 mH dengan KHA lilitan lebih dari 4,16 A. Tapi dengan keterbatasan yang ada penulis hanya menggunakan induktor sebesar 100 mH. 𝛥𝐶 = 𝐼𝑜 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝑓 𝐶 𝑉𝑜 𝛥𝐶 = 𝐼𝑜 (𝑉𝑜 − 𝑉𝑖𝑛 ) 𝑓 𝐶 𝑉𝑜 C= 0,8 (250−48) 7404.12,5.250 Jadi kapasitor yang digunakan sebesar 6,629 µF tetapi penulis menggunakan 2 buah kapasitor dipasang seri dengan nilai 470 µF 400 VDC. 3.6 Rangkaian Kontrol Salah satu cara untuk membuat konduksi MOSFET dari keadaan mati ke keadaan hidup adalah dengan memberikan pulsa tegangan pada gate-source, pulsa ini disebut dengan pulsa penyulut. Untuk mendapatkan pulsa tegangan maka didapatkan dari tegangan keluaran sistem minimum atmega 16 (rangkaian switching) yakni antara 0-5 VDC. Rangkaian kontrol merupakan rangkaian yang dibuat sebagai driver MOSFET, rangkaian ini terdiri dari rangkaian sis-min (ATmega 16). Pada pembuatan DC chopper ini menggunakan metode Pulse Width Modulation (PWM) dimana frekuensi switching dijaga tetap namun waktu on atau waktu of divariasikan, maka perlu adanya suatu komponen dalam rangkaian ini yang mengatur variasi antara waktu on dan off tersebut. Perhitungan frekuensi switching : 𝑋𝑡𝑎𝑙 3.5.4 Pemilihan dioda Fs = Dilihat dari gambar rangkaian daya bahwa dioda terpasang seri dengan induktor. Dengan kata lain tegangan dan arus akan melewati dioda sebelum masuk ke beban. Maka untuk pemilihan dioda penulis memilih dioda dengan karakteristik sebagai berikut : PWM 10 bit= 1023 Maka : 1) Nilai Vak ≥ (250 + 20%) (Faktor keamanan untuk komponen tersebut). 2) Nilai Iak ≥ (4,16 + 20%) (Faktor keamanan untuk komponen tersebut). Dengan perhitungan diatas maka penulis memakai dioda BY329-1500 Dioda tersebut memiliki Vak = 1500V dan Iak = 6A 3.5.5 Pemilihan kapasitor Perhitungan Kapasitor yang akan digunakan mengacu pada persamaan (2.15) : = 6,629 µF Fs = 2.𝑃𝑊𝑀.𝑃𝑟𝑒𝑠𝑐𝑎𝑙𝑒 16000000 2.1023.1 = 7,820 3.6.1 Program PWM Program pwm ini dibuat dengan menggunakan software bascom AVR karena bahasa yang mudah dimengerti dan mudah digunakan yang dijelaskan sebagai berikut. 3.6.1.1 Sistem mikrokontroller Mikrokontroler yang digunakan dalam sistem ini adalah mikrokontroler atmega 16 dengan memori program internal 512 Kbyte. Mikrokontroler atmega 16 dipilih karena mempunyai ADC internal di dalam chip-nya dengan tingkat kestabilan yang cukup presisi, mempunyai compiler canggih dengan bahasa pemrograman tingkat tinggi yaitu bahasa basic lebih memudahkan programmer. Selain sehingga itu juga karena mikrokontroler jenis ini memiliki memori, jumlah timer/counter, serta jumlah port yang cukup untuk digunakan dalam proyek akhir ini. Dengan mengunakan atmega 16 pengontrolan sistem lebih mudah. Gambar 3.3 berikut merupakan gambar flowchart sistem dari perancangan software. 3.8.2. Komponen keseluruhan Dari perhitungan bahwa untuk merancang DC chopper penaik tegangan ini dibutuhkan beberapa komponen, yaitu: 1) a) b) c) d) Komponen rangkaian daya : Induktor 100 mH MOSFET IRFP 460 Kapasitor 470µF, 400 Volt 2 buah (seri) Damper dioda fast, high voltage BY329-1500 Gambar 3.3 Flowchart program . 3.7 Rangkaian Driver Rangkaian driver adalah rangkaian yang menghubungkan antara rangkaian kontrol dengan MOSFET sehingga rangkaian kontrol dapat berfungsi dengan baik terhadap MOSFET. Dalam perancangan rangkaian driver komponen yang digunakan antara lain: 1) Trafo CT step down 220 Volt AC – 12 Volt AC 2) Dioda Bridge 1 ampere 3) Optocoupler TLP 250 4) Kapasitor 47 uf 50 Volt 5) Kapasitor 10 uf 50 Volt 6) Resistor 1 KΩ 7) Heatsink 8) Terminal Header 3.8 Kesimpulan Perancangan 3.8.1. Rangkaian keseluruhan Gambar 3.4 Rangkaian keseluruhan 2) Komponen rangkaian kontrol dan driver : a) Sistem minimum atmega 16 dan program pengendali PWM (Bascom AVR) b) Rangkaian power supply 12 VDC c) Optocoupler TLP250 Kemudian dilakukan uji coba pada komponen-komponen tersebut dengan tujuan untuk mengetahui apakah komponen-komponen tersebut masih berfungsi dengan baik atau tidak. BAB IV PENGUJIAN DAN ANALISA 4.1 Tujuan Pengujian Pengujian adalah merupakan suatu proses pembandingan suatu besaran yang belum diketahui dengan suatu besaran yang telah diterima oleh umum. Tujuannya adalah untuk mengetahui karakteristik alat yang telah direalisasikan dan kemudian dianalisa hasilnya. Supaya pengujian dapat memberikan hasil sesuai dengan yang diharapkan, maka ada beberapa hal yang perlu diperhatikan: 1) Parameter pengujian 2) Alat ukur yang dipergunakan 3) Hindarkan proses pengukuran dari aspek-aspek yang mungkin mempengaruhi hasil pengujian 4.2 Penggunaan alat uji Sebelum menggunakan alat untuk pengujian hendaklah diperhatikan seluruh aspek dari proses pengukuran, khususnya pada alat ukur yang dipergunakan yaitu fungsi, kalibrasi, kemampuan, dan Standard Operation Procedure (SOP). Alatalat yang dipergunakan yaitu : 1) Oscilloscope 2) Kabel probe 3) Volt meter 4) Ampere meter 5) Watt meter 6) Lampu beban 15 -200 Watt 7) Power Supply DC 48 Volt 8) Kamera 4.3 Langkah Pengujian 1) Mempersiapkan alat– alat yang akan digunakan 2) Merangkai alat dengan benar. 3) Merangkai alat ukur sesuai dengan besaran yang akan diukur. 4) Memastikan rangkaian benar sebelum alat dioperasikan. 5) Menyambunkan rangkaian dengan sumber. Baik rangkaian kontrol, rangkaian driver daya. maupun rangkaian 6) Catat hasil pengujian. 7) foto gelombang hasil pengujian. 4.4 Pengujian Alat 4.4.2.1 Data Hasil Pengujian Tabel 4.1 Data hasil pengujian pengaruh tegangan VRef terhadap duty cycle (D) NO VRef (Volt) duty cycle (%) 1. 2. 3. 4. 5. 6. 7. 8. 9. 0,5 1 1,5 2 2,5 3 3,5 4 4,5 10 20 30 40 50 60 70 80 90 4.4.1 Pengujian rangkaian catu daya driver 100 Duty Cycle (%) Catu daya ini dirancang untuk mensuplai rangkaian driver 12 volt karena tegangan kerja dari optocoupler ini adalah 10 – 35 Volt, sedangkan tegangan MOSFET sendiri gate dari MOSFET yaitu 4 – 20 maka tegangan 12 Volt ini akan dapat mengoperasikan optocoupler dan juga memberikan trigger pada MOSFET pada rangkaian daya chopper ini. Gambar 4.1 dibawah ini adalah hasil dari pengujian rangkaian catu daya 12 volt : 80 60 40 20 0 0 1 2 3 4 5 V Ref (Volt) Gambar 4. 2 Grafik VRef fungsi duty Cycle 4.4.2.2 Analisa Gambar 4.1 Keluaran tegangan catu daya driver Volt/div = 5 V; Amplitude = 2,2 V; Time/div = 50 uS Nilai tegangan keluaran dari rangkaian power supply 12 Volt DC ini sudah sesuai dengan spesifikasi yang diinginkan yakni gelombang DC murni. 4.4.2 Pengujian pengaruh Voltage reference (VRef) terhadap duty cycle Voltage reference ini digunakan sebagai pengatur duty cycle atau sebagai set point yang di bandingkan dengan gelombang setitiga pada sinyal PWM. Karena menggunakan mikrokontroller maka nilai tegangan keluaran dari rangkaian voltage reference 0-5 Volt DC. Pengujian ini bertujuan melihat gelombang pwm atau duty cycle bila tegangan referensi di variasikan dari 0 sampa 4,5 Volt Berdasarkan data hasil pengujian tabel diatas, semakin besar harga tegangan Vref (volt) maka nilai duty cycle (%) semakin bertambah. Frekuensi switching dibuat tetap yaitu 7,404 KHz. Perpotongan antara sisi luar gelombang segitiga dengan Vref akan menghasilkan gelombang pulsa pada keadaan maksimum (t 1) atau dengan kata lain bentuk pulsa ini yang berfungsi mengkonduksi MOSFET pada kondisi on. Sedangkan perpotongan antara sisi dalam gelombang segitiga dengan tegangan Vref akan menghasilkan bentuk pulsa pada keadaan minimum (t2) atau dengan kata lain bentuk gelombang pulsa ini yang akan membuat MOSFET kembali pada konduksi OFF. Siklus ini terus berulang dan membuat MOSFET bekerja sebagai saklar elektronik. Kontrol jenis inilah yang dinamakan pengaturan lebar pulsa (Pulse Width Modulation) dimana frekuensi dijaga tetap namun waktu on dan waktu off dibuat variabel. 4.4.3.1 Data Hasil Pengujian Tabel 4.3 Data hasil pengujian karakteristik efisiensi (a) (b) (c) (d) Gambar 4.10 Gelombang duty cycle (a) 20 % (b) 40 % (c) 60 % (d) 80 % Volt/div = 2V; Amplitude = 2,5 V; Time/div = 50 uS 4.4.3. Pengujian karakteristik efisiensi Untuk mengetahui besarnya tegangan yang keluar, bentuk gelombang dan efisiensi pada rangkaian daya dengan kondisi berbeban . Po = Vo. Io ( Watt ) 𝑃𝑜 ɳ =𝑃𝑖𝑛 . 100 % Pin = Vin. Iin ( Watt ) Beban yang digunakan adalah lampu pijar dengan daya bervariasi mulai dari 15 watt sampai Gambar 4.14 Grafik regulasi tegangan 100 watt dan tegangan kerja maksimum 220 V. Gambar 4.3 Rangkaian pengujian karakteristik efisiensi Gambar 4.14 Grafik efisiensi Berdasarkan hasil pengujian diatas bahwa dari sistem ini didapatkan hasil yaitu pada kondisi tanpa beban dapat menaikkan tegangan dari 48 Volt DC menjadi 253 Volt DC, efisiensi rata-rata sebesar 91,68 %. Pada saat kondisi beban maksimum dapat menaikkan tegangan dari 48 Volt DC menjadi 195 Volt DC dengan efisiensi 95,58 %, dan regulasi tegangan sebesar 29,74 %. BAB V PENUTUP 5.1. Kesimpulan Dari hasil pengujian, dapat disimpulkan bahwa: 1) Modul boost chopper yang dibuat dapat menaikkan tegangan dari 48 Volt DC menjadi 253 Volt DC pada kondisi tanpa beban dan tegangan keluarannya akan turun menjadi 195 Volt DC pada saat dibebani dengan beban lampu pijar 200 Watt. 2) Efisiensi rata-rata sebesar 91,68 %, efisiensi tertinggi pada beban lampu 90 Watt sebesar 95,90 % . 3) Regulasi tegangan pada beban maksimum 200 Watt sebesar 29,74 % dan pada beban minimum 15 Watt sebesar 4,76 %. 5.2. Saran Modul boost dc chopper ini tidak sesuai dengan spesifikasi yang diinginkan, oleh karena itu penulis memberikan saran diantaranya: 1) Perlu adanya pengkajian yang lebih mengenai modul boost chopper ini, sehingga didapatkan sesuai dengan spesifikasi yang diinginkan. 2) Memperbaiki frekuensi switching hingga 20 Khz 3) Perlu adanya penggantian beberapa komponen seperti kapasitor harus diganti kemampuan menyimpan tegangannya dengan yang lebih besar, menggunakan 4) Nilai induktor yang sesuai perhitungan. 5) Perlu ditambahkan rangkaian feedback agar saat dibebani secara maksimal tegangan keluaran tetap stabil. DAFTAR PUSTAKA Hayt, William H., Jack E Kemmerly, Steven M, Durbin. 2005. Rangkaian Listrik Jilid 1 (edisi ke enam). Erlangga. Jakarta Rashid, Muhammad H.,1999. Elektronika Daya (Power Electronics: Circuit, Devices, and Application, 2nd edition), PT. Prenhalindo, Jakarta. Surya Hasan, (2004), Elektronika Daya, Politeknik Negeri Bandung, Bandung Sutrisna , Kadek Fendy. 2008. Isolasi Antara Drive Control dan Rangkaian Power www.LPKEE ITB’s students blog.com http://en.wikipedia.org http://www.alldatasheet.com http://fahmizaleeits.wordpress.com/2011/02/26/tut orial-software-bascom-avr/ http://www.elektindo.com