11penelitian simulasi proteksi motor
advertisement

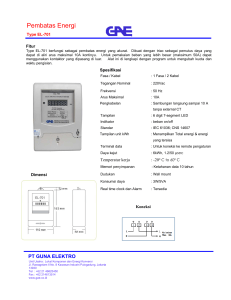
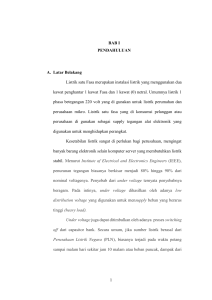
LAPORAN PENELITIAN BOPTN SIMULASI PROTEKSI MOTOR INDUKSI TIGA (3) FASA TERHADAP GANGGUAN TEGANGAN LEBIH DAN TEGANGAN KURANG MENGGUNAKAN MATLAB Oleh : Yuli Asmi Rahman, ST., M.Eng. NIDN. 0002078104 Nurhani Amin, S.Pd, MT NIDN. 0027087904 UNIVERSITAS TADULAKO DESEMBER 2015 1 2 BAB 1. PENDAHULUAN 1.1. Latar Belakang Motor Induksi Tiga fasa merupakan salah satu motor yang banyak digunakan di industri, akan tetapi Motor Induksi Tiga fasa sering mengalami gangguan yaitu dari tegangan yang tidak normal baik itu tegangan kurang atau tegangan lebih. Suplai tegangan yang kurang dapat menyebabkan kenaikan arus motor pada beban yang sama, sehingga belitan motor akan mengalami panas berlebih. Sementara tegangan yang berlebih dapat menyebabkan kerusakan, sehingga dapat terjadi tegangan tembus pada isolasi.Kondisi-kondisi gangguan fasa seperti tegangan kurang, tegangan lebih ataupun terputusnya salah satu fasa dapat menimbulkan permasalahan yang cukup serius terhadap peralatan atau mesin-mesin terutama yang menggunakan sumber listrik 3 fasa. Berikut contoh permasalahan pada mesin atau peralatan listrik di lingkungan industri yang timbul akibat gangguan fasa: 1) Lifetime peralatan listrik atau mesin semakin menurun. 2) Seringnya terjadi kasus gulungan terbakar pada motor induksi 3 fasa dan lain-lain. Untuk mengatasi gangguan tersebut maka perlu dibuat proteksi tegangan lebih atau tegangan kurang motor tiga fasa. Dari simulasi alat pengaman motor induksi tiga fasa ini diharapkan motor dapat bebas dari gangguan tegangan. Penggunaan motor listrik dengan sistem kontrol dan proteksi merupakan bagian dari suatu persyaratan mutlak untuk mengopreasikan motor sebagai penggerak utama. Penggunaan motor induksi tiga fasa, serta starting dan proteksi yang dibuat dalam tugas komponen dan akhir ini untuk pengenalan dasar mengenai komponen- aplikasi perangkat elektronik untuk mengontrol dan mengamankan peralatan dengan daya besar, serta agar lebih mudah untuk memahami peralatan elektromekanis dan rangkaian elektronik sebagai perangkat pengendali motor konvensional yang dapat digunakan sebagai fungsi sistem yang sama yaitu untuk starting dan proteksi motor induksi tiga fasa. 3 Permasalahan yang dihadapi adalah bagaimana relay proteksi mengamankan motor induksi tiga fasa terhadap tegangan lebih dan tegangan kurang. Tujuannya untuk mengetahui cara proteksi terhadap tegangan lebih dan tegangan kurang pada motor induksi tiga fasa 4 BAB 2. TINJAUAN PUSTAKA 2.1. Pengenalan Mikrokontroler Mikrokontroler adalah suatu sistem komputer yang dibuat dalam satu chip, digunakan untuk mengontrol atau sebagai pengendali peralatan elektronik, dilengkapi dengan memory serta unit masukan dan keluaran(unit I/O - serial dan paralel) dengan program data yang bisa ditulis dan dihapus, jadi cara kerja mikrokontroler sebenarnya adalah membaca dan menulis data. Jenis mikrokontroler sangat banyak, pada prinsipnya terdapat dua tipe, yaitu : 1. Tipe CISC atau Complex Instruction Set Computing yang lebih kaya instruksi tetapi, fasilitas internal secukupnya. 2. Tipe RISC atau Reduced Instruction Set Computing yang justru lebih kaya fasilitas internalnya tetapi, jumlah instruksi secukupnya. Fasilitas internal yang dimaksudkan di sini antara lain : jumlah dan macam register internal, pewaktu (timer) atau pencacah (counter), Konverter Analog ke Digital (ADC) atau Konverter Digital ke Analog (DAC), unit komparator, interupsi eksternal maupun internal, RAM untuk penyimpanan data saat eksekusi program, ROM, EPROM, serial interface dan paralel interface, interrupt controler dan lainnya (tergantung fitur yang melengkapi mikrokontroler tersebut). Tidak seperti teknologi relay atau kontaktor, dimana relay atau kontaktor dibangun untuk mengendalikan sistem kendali yang tetap maka, mikrokontroler bisa diubah untuk mengendalikan apapun tanpa harus banyak merubah hardware. Cukup mengganti program data, maka mikrokontroler sudah dapat mengendalikan sesuatu yang lain sama sekali. Beberapa jenis mikrokontroler adalah : 1. Mikrokontroler keluaran ATMEL tipe CISC yang dapat dikatakan sebagai mikrokontroler terlaris dan termurah saat ini. Chip mikrokontroler ini dapat diprogram menggunakan port paralel atau serial. Selain itu, dapat beroperasi 5 hanya dengan 1 chip dan beberapa komponen dasar seperti kristal, resitor dan kapasitor, misalnya tipe ATMEL 8051 (terdapat AT89C51/52/2051/4051,AT89S51/52/2051/4051),AVR(ATMega8535, ATTiny2313) masuk dalam tipe RISC. 2. Mikrokontroler keluaran PIC tipe RISC buatan Microchip Technology. Bersumber dari PIC1650 yang dibuat oleh Divisi Mikroelektronika General Instruments. Saat ini PIC telah dilengkapi dengan EPROM dan komunikasi serial, UART, kernel kontrol motor, dll, serta memori program dari 512 word hingga 32 word. 1 Word disini sama dengan 1 instruki bahasa assembly yang bervariasi dari 12 hingga 16 bit, tergantung dari tipe PICmicro tersebut. Mikrokontroler ATmega32 adalah mikrokontroler 8-bit keluaran Atmel dari keluarga 2.2. Mikrokontroler 2.2.1. Pengertian Mikrokontroler ATMega8535 merupakan mikrokontroler produksi ATMEL dengan 8 KB In Sistem Programable Flash, 512 Byte EPROM dan 512 byte internal SRAM. AVR ATMega8535 memiliki seluruh fitur yang dimiliki AT90S8535. Selain itu, konfigurasi pin AVR ATMega8535 juga kompatibel dengan AT90S8535. Pada diagram blok arsitektur ATMega8535 (Gambar 2.2) terdapat sebuah inti prosesor yaitu Central Processing Unit dimana terjadi proses penyimpanan instruksi dan komputasi data. Seluruh register umum sebanyak 32 buah terhubung langsung dengan unit ALU (Arithmatic and Logic Unit). Terdapat 4 port masing-masing 8 bit yang dapat difungsikan sebagai masukan dan keluaran. Berikut ini gambar mikrokontroler ATMega8535 (HeryantoAry, AdiWisnu, 2008). 6 Gambar 2.1 Mikrokontroller ATmega8535 Adapun spesifikasi penting dari ATMega8535 adalah sebagai berikut: 1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz 2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte, dan EEPROM(Electrically Erasable Programmable Read Only Memory) sebesar 512 byte. 3. ADC Internal dengan fidelitas 10 bit sebanyak 8 channel. 4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps. 5. Enam pilihan mode Sleep untuk menghemat penggunaan daya listrik. Secara lebih lengkapnya ATMega8535 memiliki arsitektur seperti pada gambar berikut (Atmel, 1997): 7 Gambar 2.2 Arsitektur Mikrocontroler ATMega8535 2.2.3. Konfigurasi Pin ATmega8535 ATmega8535 memiliki jumlah pin sebanyak 40 dengan catu daya tunggal 5 volt DC, dimana masing – masing pin mempunyai kegunaan. Konfigurasi pin dari jenis mikrocontroler tersebut adalah sebagai berikut : Gambar 2.3 Konfigurasi Pin ATMega8535 8 Secara umum konfigurasi dan fungsi pin ATMega8535 dapat dijelaskan sebagai berikut (HeryantoAry, AdiWisnu, 2008): 1. Pin 10 VCC Input sumber tegangan (+). 2. Pin 31 GND Ground (-). 3. Pin 33 – pin 40 port A (PA7…PA0) berfungsi sebagai input analog dari ADC (Analog to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah, jika ADC tidak digunakan. 4. Pin 1 – pin 8 port B (PB7…PB0) berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading. Fungsi lain dari port ini selengkapnya bisah dibaca pada buku petunjuk “AVR ATMega8535”. 5. Pin 22 – pin 29 port C (PC7…PC0) berfungsi sebagai port I/O dua arah. Fungsi lain port ini selengkapnya bisah dibaca pada buku petunjuk “AVR ATMega8535”. 6. Pin 14 – pin 21 port D (PD7…PD0) berfungsi sebagai port I/O dua arah. Port PD0 dan PD1 juga berfungsi sebagai RXD dan TXD, yang dipergunakan untuk komunikasi serial. Fungsi lain port ini selengkapnya bisah dibaca pada buku petunjuk “AVR ATMega8535”. 7. Pin 9 input reperangkat. 8. Pin 13 XTAL1 input ke amplifier inverting osilator dan input ke sirkuit clock internal. 9. Pin 12 XTAL2 Output dari amplifier inverting osilator. 10. Pin 30 AVCC input tegangan untuk port A dan ADC. 11. Pin 32 AREF tegangan referensi untuk ADC. 9 Gambar 2.4 Memori Data AVR ATMega8535 2.3. Motor Induksi Motor induksi merupakan motor listrik arus bolak balik (ac) yang paling luas digunakan. Penamaannya berasal dari kenyataan bahwa motor ini bekerja berdasarkan induksi medan magnet stator ke rotornya, dimana arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator. 2.3.1. Prinsip kerja Motor 3 Phasa Bila sumber tegangan tiga phasa dipasang pada kumparan stator, maka pada kumparan stator akan timbul medan putar dengan kecepatan, ns = 120f/P , ns = kecepatan sinkron, f = frekuensi sumber, p = jumlah kutup. Medan putar stator akan memotong konduktor yang terdapat pada sisi rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi ( ggl ) sebesa E2s = 44,4fnØ . Keterangan : E = tegangan induksi ggl, f = frekuensi, N = banyak lilitan, Q = fluks. Karena kumparan rotor merupakan kumparan rangkaian tertutup, maka tegangan induksi akan menghasilkan arus ( I ). Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada rotor. Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torsi beban, maka rotor akan 10 berputar searah dengan arah medan putar stator. Untuk membangkitkan tegangan induksi E2s agar tetap ada, maka diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan putar rotor (nr). Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S ) yang dinyatakan dengan Persamaan S = ns-nr/ns (100%). Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi suatu motor akan timbul apabila ns > nr. Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan motor tak serempak atau asinkron. Untuk menjalankan motor telah dikenal berbagai cara yaitu seperti motor Star (Y-Δ). Start (Y-Δ) ialah sirkuit yang dipakai buat mengoperasikan motor tiga phase yang memiliki cukup daya besar. Untuk menggerakkan motor tersebut memang diperlukan daya awal yg besar, serta dengan jenis rangkaian ini dimana rangkaian star dipakai hingga semuanya menjadi stabil akan rangkaiannya dirubah jadi delta. Rangkaian Star Delta banyak komponen konektor dan timer. Timer tersebut dipakai untuk mengatur waktu berubahnya rangkaian dari star menjadi rangkaian delta, yaitu diantara lima hingga sepuluh detik. Kemudian ada yang namanya Termal Over-Load Relay atau disingkat TOR. Guna dari TOR adalah untuk memotong rangkaian hingga motor menjadi berhenti jika terjadi kelebihan beban. Star Delta juga memiliki fungsi lainnya yaitu mengurangi jumlah arus start disaat motor untuk pertama kalinya dihidupkan. Karena fungsi inilah, star delta paling banyak digunakan pada system starting di motor-motor listrik. Pemakaian rangkaian ini akan mengurangi lonjakan arus-listrik pada saat motor di starter. Prinsip kerjanya adalah dengan membuat star awal menjadi tidak dikenakan tegangan secara penuh, yaitu dengan cara dihubungkan dengan star. Kemudian saat motor telah berputar serta arus menjadi menurun, fungsi timer 11 pun berjalan yang akan memindakan dengan otomatis rangkaian menjadi delta. Dengan berubahnya menjadi delta, maka arus yang melalui motor akan menjadi penuh. 2.3.2. Proteksi Motor Proteksi motor adalah sebuah sistem untuk melindungi motor jika tejadi gangguan dari penyulang dan dari alat yang digerakkan. Faktor – faktor yang menyebabkan gangguan pada motor listrik antara lain : a. Berasal dari alat yang digerakkan b. Dari jaringan suplai c. Dari keadaan sekeliling Suplai tegangan yang kurang/rendah dapat menyebabkan kenaikan arus pada beban yang sama, sehingga belitan motor akan mengalami pemanasan lebih. Sementara tegangan yang lebih dapat menyebabkan umur isolasi menurun, bahkan tembusanya kekuatan isolasi. Tegangan kurang disebabkan oleh: a. Gangguan pada jaringan. b. Kesalahan operasi pada tap-changer transformator c. Hubung pendek Proteksi tegangan lebih akan memberikan order trip pada motormotor. Prinsip kerja dari proteksi tegangan lebih dan kurang adalah proteksi akan bekerja jika salah satu tegangan lebih besar dan kecil dari Vset yaitu 242 dan 198. 2.4. Komponen Pendukung Mikrokontroler 2.4.1. Relay Relay adalah komponen elektronika berupa saklar elektronik yang digerakan oleh arus listrik. Relay yang merupakan aplikasi dari elektromagnetik ini tersusun dari sebuah kumparan kawat beserta sebuah 12 inti besi lunak. Dua komponen utama relay ini dilengkapi dengan kontak – kontak. Pada waktu arus kontrol kecil melewati kumparan, inti besi lunak akan di magnetisasi. Besar induksi magnet ini akan ditentukan oleh bahan zat yang dilalui oleh garis – garis medan magnet. Medan magnet yang ditimbulkan oleh arus listrik, besarnya juga dipengaruhi oleh kuat lemahnya arus yang dilalui arus listrik itu sendiri. Setelah inti besi lunak termagnetisasi, maka inti besi ini akan menarik armature sehingga kontak-kontak dapat terhubung. Dengan memanfaatkan gerakan armature ini banyak relay yang diproduksi dengan berbagai variasi kontak – kontak. Biasanya kontak akan berhubung pada saat relay bekerja sering disebut normally open (NO), sedangkan kontak yang membuka saat relay bekerja disebut normally close (NC). Saat arus listrik tidak mengalir dalam kumparan maka inti besi lunak tidak bersifat magnet lagi sehingga armatur terlepas diikuti juga lepas atau terhubungnya kontak – kontak seperti keadaan semula. Berikut ini adalah simbol yang sering digunakan untuk mengambarkan sebuah relay dan kontruksi sebuah relay. Gambar 2.7 Relay (a) Konstruksi (b) Simbol 13 Relay tegangan lebih adalah relay yang bekerja untuk mendeteksi keadaan tegangan lebih. Apabila tegangan yang dikenakan kepada relay lebih besar dari nilai nominalnya (settingnya) dan berlangsung dalam waktu yang melampaui batas waktu tertentu (lebih besar dari setting waktunya), maka relay tegangan lebih akan beroperasi atau bekerja. Demikian juga halnya dengan relay tegangan kurang, yaitu bahwa relay akan beroperasi apabila tegangan yang dikenakkan kepadanya kurang dari nilai tertentu (sesuai settingnya) dan berlangsung melampaui batas waktu tertentu (setting waktunya) maka relay tegangan kurang akan beroperasi. 2.4.2. Kapasitor Kapasitor adalah komponen elektronika yang berfungsi menstabilkan tegangan yang masuk serta menyimpan tegangan untuk sementara waktu, kapasitor ini terdiri dari dua buah lempengan elektroda yang di pisahkan oleh bahan tertentu, bahan yang di gunakan menentukan jeni kapasitor tersebut berikut ini jenis – jenis kapasitor : a. Electric double capacitor (super capacitor) Jenis kapasitor ini bahan dielektriknya sama dengan kapasitor elektrolit. Tetapi bedanya adalah ukuran kapasitornya lebih besar dibandingkan kapasitor elektrolit. Biasanya mempunyai satuan F. Gambar bentuk fisiknya dapat dilihat di samping, pada gambar tersebut kapasitornya memiliki ukuran 0.47F. Kapasitor ini biasanya digunakan untuk rangkaian power supply. Gambar 2.8 kapasitor electric double 14 2.4.3. Kontaktor Kontaktor adalah jenis saklar yang bekerja secara magnetik yaitu kontak bekerja apabila kumparan diberi energi listrik. The National Manufacture Assosiation (NEMA) mendefinisikan kontaktor magnetis sebagai alat yang digerakkan secara magnetis untuk menyambung dan membuka rangkaian daya listrik. Tidak seperti relay, kontaktor dirancang untuk menyambung dan membuka rangkaian daya listrik tanpa merusak. Prinsip kerja kontaktor sebagai berikut. Sebuah kontaktor terdiri dari koil, beberapa kontak normally open (NO) dan beberapa kontak normally close (NC). Pada saat satu kontaktor normal, NO akan membuka dan pada saat kontaktor bekerja, NO akan menutup. Sedangkan kontaktor NC sebaliknya yaitu ketika dalam keadaan normal kontak NC akan menutup dan dalam keadaan bekerja kontak NC akan membuka. Koil adalah lilitan yang apabila diberi tegangan akan terjadi magnetisasi dan menarik kontak-kontaknya sehingga terjadi perubahan atau bekerja. Kontaktor yang dioperasikan secara elektromagnetis adalah salah satu mekanisme yang paling bermanfaat yang perna dirancang untuk penutupan dan pembukaan rangkaian listrik. Koil atau kontaktor terdiri dari 2 kontak yaitu kantak bantu dan kontak utama, kontak bantu : kontak/saklar/swicth yang digunakan untuk pengontrol (arus kecil) dengan kode angka :13-14, 21-22, 43-44, 31-32. Sedangkan kontak utama : kontak yang mampu dialiri arus secara maksimal (arus besar) dengan kode angka :1-2, 3-4, 5-6. Fungsi dari kontak-kontak dibuat untuk kontak utama dan kontak bantu. Kontak utama terdiri dari kontak NO dan kontak bantu terdiri dari kontak NO dan NC. Kontak utama digunakan untuk mengalirkan arus utama, yaitu arus yang diperlukan untuk pesawat pemakai listrik misalnya motor listrik, pesawat pemanas dan sebagainya. Sedangkan kontak bantu digunakan untuk mengalirkan arus bantu yaitu arus yang 15 diperlukan untuk kumparan magnet, alat bantu rangkaian, lampu-lampu indikator, dan lain-lain. 2.4.4. Transformator Transformator atau sering juga disebut trafo adalah komponen elektronika pasif yang berfungsi untuk mengubah (menaikkan/menurunkan) tegangan listrik bolak-balik (AC). Bentuk dasar transformator adalah sepasang ujung pada bagian primer dan sepasang ujung pada bagian sekunder. Bagian primer dan sekunder adalah merupakan lilitan kawat email yang tidak berhubungan secara elektris. Kedua lilitan kawat ini dililitkan pada sebuah inti yang dinamakan inti trafo. Untuk trafo yang digunakan pada tegangan AC frekuensi rendah biasanya inti trafo terbuat dari lempengan besi yang disusun menjadi satu membentuk teras besi. Sedangkan untuk trafo frekuensi tinggi (digunakan pada rangkaian radio Frekuensy/RF) menggunakan inti ferit (serbuk besi yang dipadatkan). Sementara itu trafo penaik tegangan (Trafo Step Up) adalah kebalikan dari trafo step down yaitu untuk menaikkan tegangan listrik AC. Sebuah trafo penurun tegangan biasa juga kita gunakan untuk menaikkan tegangan dengan membalik bagian primernya menjadi sekunder dan bagian sekunder menjadi primer, tentu dengan memperhatikan tegangan kerja trafo tersebut. Contoh penggunaan trafo penaik tegangan adalah pada rangkaian emergency light/lampu darurat yang menyala saat PLN padam dan UPS pada PC, prinsip kerjanya adalah tegangan DC (searah) yang berasal dari battery diubah menjadi tegangan AC (bolak-balik) lalu dinaikkan menjadi 220 volt oleh trafo sehingga mampu menyalakan lampu atau PC di saat PLN padam. 16 BAB 3. METODE PENELITIAN Pada pembuatan tugas akhir ini terdapat langkah-langkah kerja yang dilakukan agar hasilnya dapat tercapai. Adapun langkah-langkah tersebut adalah sebaggai berikut : 3.1. Teknik Pengumpulan Data 3.1.1. Pengukuran Dalam hal ini penulis melakukan pengukuran dengan menggunakan alat ukur agar mendapatkan hasil pengukuran yang baik dalam pengambilan data. 3.1.2. Studi Literatur Studi literatur dilakukan dengan mencari referensi tentang landasan teori yang berkaitan dengan Tugas Akhir ini, baik dari perpustakaan maupun internet. 3.1.3. Simulasi dengan Matlab Simulasi dilakukan setelah mendapatkan referensi yang cukup tentang peralatan proteksi. Langkah-langkah yang di lakukan : a. Perancangan rangkaian elektronika berdasarkan teori dan spesifikasinya. b. Perakitan masing-masing blok rangkaian pada papan PCB untuk mempermudah penyambungan dan pengujian. c. Pengecekan ulang pada rangkaian yang telah selesai dibuat. d. Sebelum dilakukan pengujian rangkaian, harus dipastikan bahwa pengintegrasian antara hardware dan software sudah benar serta memastikan juga bahwa komponen yang digunakan sudah melalui pengujian dengan alat ukur untuk memastikan komponen tersebut tidak rusak. 17 3.1.4. Pengambilan Data Setelah pengujian dilakukan dan rangkaian proteksi motor induksi 3 fasa terhadap gangguan tegangan lebih dan tegangan kurang berbasis mocrokontroler ATMega8535 bekerja sesuai dengan yang diinginkan, maka dilakukan pengambilan data menggunakan voltmeter. 3.2. Perancangan Sistem Pada perancangan alat ini akan dijelaskan mengenai komponen yang digunakan dalam membuat modul sistem proteksi tegangan lebih dan tegangan kurang. Untuk mempermudah memahami prinsip kerja dari pembuatan modul proteksi tegangan lebih dan tegangan kurang pada motor induksi tiga fasa berbasis mikrokontroler. Dari sumber tegangan 3 fasa arus masuk ke rangkaian sensor tegangan, fungsi dari rangkaian sensor tegangan adalah untuk menurunkan tegangan dan merubah tegangan output ac menjadi dc lalu masuk ke mikrokontroler, fungsi dari rangkaian mikrokontroler tersebut adalah untuk memproses menjalankan motor dan sebagai proteksi motor, jika terjadi gangguan maka relay bekerja menghentikan motor, yang akan di tampilkan di LCD gangguan yang sedang terjadi. Dan sebaliknya jika digunakan untuk menjalankan motor maka tombol di tekan yang ada di rangkaian push button, kemudian relay bekeja menjalankan motor. 3.3. Cara Kerja Rangkaian Sistem kerja sistem proteksi tegangan lebih dan tegangan kurang pada motor induksi tiga fasa ini bekerja berdasarkan pembacaan tegangan fasa yang terbaca oleh sensor tegangan yaitu sebuah transformator yang dihubungkan dari fasa ke netral, dengan rasio transformator yang tetap maka setiap tegangan yang melewati lilitan primer transformator akan terasa juga di lilitan sekunder transformator. Tegangan output dari lilitan sekunder transformator ini kemudian disearahkan oleh rangkaian dioda bridge yang selanjutnya menjadi input ADC 18 pada mikrocontroler. Di dalam mikrokontoler di setting parameter–parameter tegangan yang diijinkan untuk menggerakkan motor induksi yaitu 198 volt 90% sampai dengan 242 volt 105% dari tegangan normal 220 volt, jika tegangan tidak memenuhi setting yang telah di tentukan maka mikrocontroler akan memerintahkan rangkaian relay driver untuk memutuskan aliran tegangan dari sumber ke motor induksi. 19 BAB 4. HASIL DAN PEMBAHASAN 4.1. Hasil 4.1.1. Perancangan Perangkat Keras a. Rangkaian Sensor Rangkaian sensor digunakan untuk mendapatkan tegangan antara fasa dan dapat membaca tegangan masing-masing fasa seperti tegangan R,S,T. b. Rangkaian Mikrocontroler Sistem Minimum Rangkaian ini berfungsi sebagai pusat pengelolaan data dan sebagai dasar dari pengolahan data yang akan di gunakan untuk rangkaian sensor tegangan. c. Rangkaian Relay Driver Relay driver sebagai pengolah output, sebagai pengolah keluaran dari mikrocontroller, dimana keluaran tersebut adalah hasil dari masukan yang berasal dari sensor tegangan dan push button. d. Rangkaian Kontaktor Rangkaian ini berfungsi untuk menjalankan motor hubung Y ke ∆ 4.1.2. Perancangan Perangkat Lunak a. Kode Program Pembacaan Tegangan (sensor tegangan) b. Kode Program Pengontrolan Tegangan Lebih & tegangan Kurang c. Kode Program Tampilan LCD d. Kode Program Untuk Star Motor e. Kode Program Untuk Stop Motor 4.2. Pembahasan 4.2.1. Pengujian Karakteristik Setelah seluruh rangkaian Proteksi selesai dibuat, maka dilakukan prosedur pengujian dengan tujuan mengetahui karakteristik dari proteksi 20 tegangan. Parameter yang diukur adalah waktu yang diperlukan oleh proteksi untuk bekerja apabila terjadi tegangan lebih atau tegangan kurang. Tabel. 4.1. Simulasi percobaan waktu proteksi bekerja Percobaan Tegangan (Volt) Lebih Kurang 1 242 - 2 243 - 3 244 - 4 - 198 5 - 197 6 - 196 4.2.2. Delay Relay Driver ke Kontaktor Simulasi ini untuk mengetahui berapa waktu yang diperlukan untuk start Y ke start ∆. Dan interval waktu yang berikan pada relay driver berkisar 00.77 detik. Tabel 4.2. Percobaan waktu perpindahan dari Y - ∆ Percobaan Tegangan (Volt) Waktu Perpindahan Dari Y - ∆ (Detik) 1 220 00.83 2 220 00.79 3 220 00.77 4 220 00.72 5 220 00.74 Rata-rata 220 00.77 21 4.2.3. Pengukuran Setelah perencanaan dan pembuatan sistem maka langkah selanjutnya yaitu melakukan pengukuran. Pengukuran dilakukan agar dapat mengetahui apakah semua sistem sudah sesuai atau belum dengan spesifikasi alat yang akan dibuat. Alat yang digunakan dalam pengukuran adalah menggunakan voltmeter. Voltmeter digunakan untuk mengukur tegangan pada rangkaian. Rangkaian yang akan diukur tegangannya adalah power supply, 4.2.3.1. Pengujian Proteksi Motor Pengujian proteksi motor ini bertujuan untuk mengetahui apakah sistem bekerja sesuai dengan setting tegangan kerja yang telah di program kedalam mikrokontroler nilai setting tegangan adalah 1:100 volt. Pengujian dilakukan dengan menggunakan trafo step down untuk menurunkan tegangan. Tegangan disetting pada rating 198 Volt untuk tegangan terendah dan 242 Volt untuk tegangan tertinggi. Setelah dilakukan percobaan dengan cara mengatur ratting trafo step down, rangkaian dapat berfungsi dengan normal pada tegangan 220 volt. Sedangkan tegangan 198 Volt rangkaian ini memerintahkan relay driver untuk memutuskan arus listrik pada kontaktor, hal ini dikarenakan nilai tegangan telah melewati batas setting dan mengakibatkan terputusnya tegangan supply motor induksi. Begitupun apabila tegangan dinaikan menjadi 242 Volt. Berikut tebel 4.3 pengujian proteksi motor. Tabel 4.3. simulasi Proteksi Motor Tegangan Line to Netral (V) Proteksi Keterangan % 198 On Proteksi Bekerja -10% 212 205 Off Proteksi tidak Bekerja -5% 220 216 211 Off Proteksi tidak Bekerja 0% 242 222 217 On Proteksi Bekerja +5% R S T 217 203 218 22 Dari tabel 4.3. simulasi proteksi motor di atas proteksi tegangan lebih dan tegangan kurang motor 3 fasa bekerja pada tegangan kurang dari 198 volt dan tegangan lebih dari 242 volt. 4.2.3.2. Pengujian Salah Satu Fasa Pengujian salah satu fasa bila terjadi tegangan lebih dari 242 volt pada salah satu fasa dan fasa yang lain dalam keadaan normal 220 volt maka proteksi akan bekerja begitu pula sebaliknya bila terjadi tegangan kurang dari 198 volt maka proteksi akan bekerja. Tabel 4.4. Simulasi Pengujian tegangan lebih dan tegangan kurang pada salah satu fasa saat tegangan fasa yang lain normal Tegangan Line To Netral (V) Proteksi Keterangan 221 On Proteksi Bekerja 217 219 On Proteksi Bekerja 232 221 242 On Proteksi Bekerja 219 207 198 On Proteksi Bekerja R S T 242 226 198 23 BAB 5. PENUTUP 5.1. Kesimpulan Berdasarkan hasil simulasi dan analisa rangkaian proteksi Tegangan Lebih dan Tegangan Kurang pada motor induksi tiga fasa maka dapat diambil kesimpulan : 1. Proteksi Tegangan Lebih dan Tegangan Kurang pada Motor Induksi 3 Fasa Berbasis Mikrokontroler ATMega8535, proteksi dapat bekerja apabila tegangan kurang dari 198 Volt dan begitu pula sebaliknya bila terjadi tegangan lebih dari 242 volt maka proteksi akan bekerja. 2. Proteksi Tegangan Lebih dan Tegangan Kurang pada Motor Induksi 3 Fasa Berbasis Mikrokontroler ATMega8535, bila terjadi tegangan lebih dari 242 Volt pada salah satu fasa dan fasa yang lain dalam keadaan normal 220 volt maka proteksi akan bekerja, begitu pula sebaliknya bila terjadi tegangan kurang dari 198 volt pada salah satu fasa maka proteksi akan bekerja. 5.2. Saran Kami mengharapkan peneliti selanjutnya dapat mengembangkan simulasi menjadi lebih baik lagi, dalam segi tampilan, fungsi dan tingkat ketepatannya serta penulisan dari penelitian ini. 24 DAFTAR PUSTAKA ATMEL Corporation. 2001. Getting Started With the CodeVisionAVR C Compiler, (Online).(www.hpinfotech.ro/getstart.pdf. diakses 25 juni 2015). ATMEL Cotporation. 2006. ATMega8535 Prealiminary Complate, (Online). (http://atmel.com/dyn/resources/prod dokuments/doc2502.pdf, diakses 05 juni 2015 Atmel. 1997.AT89 Series Hardware Deskrituon, Atmel Inc, (Online). (http://www.atmel.com, diakses 30 juni 2015), USA. Anynomouse,http://core-elektronics.com.au/low/stroke/index.php/low-profile-crystaloscilator-16-hz-html di akses pada tanggal 5 januari 2015 jam 17.00 WIB Bisho.Owen, 2002, Dasar-dasar Elektronika. Erlangga. Jakarta. Data Sheet LCD-Module-Cob-16x4-GVLCM1604B-12428. Heryanto Ary, Ady Wisnu. 2008. (.Program Bahasa C Untuk Mikrokontroler ATMega8535.ANDI,.(CodeVisionAVR Compiler, 2001). Yogyakarta Zuhal, 1988, Dasar Teknik Tenaga Listrik dan Elektronika Daya. Gramedia Pustaka Utama. Jakarta. 25