OSILATOR HARMONIK
DISUSUN OLEH :
KELOMPOK 4
ADITYA PUTRA SANJAYA
KRISTINA SINAGA
STEPHANIE SISILIA BR SEMBIRING
VERONICA MF SILALAHI
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS NEGERI MEDAN
2019/2020
KATA PENGANTAR
Puji syukur kami panjatkan kepada Tuhan Yang Maha Esa, atas berkat dan rahmatnya kami dapat
menyelesaikan makalah yang berjudul “ Osilator Harmonik” tepat pada waktunya.
Oleh karena itu saya mengucapkan terima kasih kepada bapak Prof.Dr.Nurdin Bukit,M.Si dan ibu
Dr.Eva Marlina Ginting,M.Si selaku dosen pengampu mata kuliah mekanika semua pihak yang ikut
berpartisipasi dalam penyusunan makalah ini.
Tak lepas dari kekurangan, kami menyadari bahwa makalah ini masih jauh dari kata sempurna.
Oleh karena itu kami mohon maaf atas kesalahan dan kekurangan yang terdapat dalam makalah ini dan
kami harapkan kritik dan saran yang membangun demi karya yang lebih baik dimasa mendatang.
Semoga makalah ini bermanfaat bagi pembaca dan terutama bagi penulis sendiri.
Medan, Septermber 2019
Kelompok 4
i
Daftar Isi
Kata Pengantar……………………………………………………………................i
Daftar Isi………………………………………………………………….................ii
BAB I PENDAHULUAN
1.1 LatarBelakang................................................... ................................................... 1
1.2 Rumusan Masalah.................................................................................................1
1.3 Tujuan...................................................................................................................1
BAB II PEMBAHASAN
2.1 Pendahuluan ......................................................................................................... 3
2.2 Osilator Linear dan Non Linear ........................................................................... 3
2.3. Osilator Harmonik Sederhana ............................................................................. 4
2.4. Energi Osilator Harmonik Sederhana ................................................................. 6
2.5. Persamaan Osilasi ............................................................................................... 9
2.6. Persamaan Gerak Osilasi Redaman .................................................................. 10
BAB III PENUTUP
3.1. Kesimpulan ......................................................................................................... 16
3.2. Saran....................................................................................................................16
Daftar Pustaka ......................................................................................................... 17
ii
BAB I
PENDAHULUAN
1.1 Latar Belakang
Secara fisika, osilator harmonis mendeskripsikan getaran-getaran kecil di sekitar sebuah
posisi kesetimbangan stabil, dan merupakan sebuah sistem yang sangat penting di dalam
mekanika klasik. Informasi ini menunjukkan bahwa osilator harmonis adalah sebuah sistem
fisika, seperti kebanyakan sistem fisika lain yang bergetar. Benda yang bergetar, secara klasik,
dapat dimodelkan sebagai osilator harmonis, walaupun pada kenyataanya osilator harmonis itu
tidak ada dalam kehidupan sehari-hari.
Dalam mekanika kuantum, osilator harmonis sangat penting, misalnya ketika kita
mempertimbangkan gerakan sebuah partikel dalam satu dimensi, yaitu getaran dari sebuah
molekul diatomik yang inti atomnya bermassa m1 dan m2. Contoh lain sistem yang ditinjau
melalui pendekatan osilator harmonis dalam mekanika kuantum adalah vibrasi atom-atom dalam
kristal zat padat, yang kemudian akan memperkenalkan kita pada konsep tentang phonon, dan
gelombang elektromagnetik yang terkuantisasi, dikenal sebagai photon. Sementara itu, ada
contoh-contoh lain yang menarik dan telah dikembangkan melalui mekanika kuantum, seperti
optika kuantum, komputasi kuantum, laser, NMR, dsb. Adapaun pembuatan makalah mengenai
osilator harmonic ini sangatlah penting untuk dipelajari khusunya bagi mahasiswa yang berada
pada jurusan pendidikan fisika.
1.2 Rumusan Masalah
1. Apa yang dimaksud dengan osilator linear dan osilator non linear?
2. Bagaimana sistem osilator harmonic sederhana?
3. Energi apa yang dihasilkan osilator harmonic sederhana?
4. Bagaimana persamaan osilasi dan persamaan gerak osilasi redaman?
1.3 Tujuan
1. Untuk mengetahui osilator linear dan osilator non linear
2. Untuk mengetahui sistem osilator harmonic sederhana
3. Untuk mengetahui energi yang dihasilkan osilator harmonic sederhana
1
4. Untuk mengetahui persamaan osilasi dan persamaan gerak osilasi redaman
2
BAB II
PEMBAHASAN
2.1 Pendahuluan
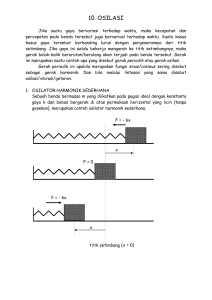
Jika sebuah sistem dalam kesetimbangan stabil statis atau dinamis ,ketika sistem tersebut
dipindahkan sedikit dari posisi kesetimbangan,gerak osilasi yang dihasilkan disebut gerak
harmonik.
Untuk menjaga gerak osilasi dalam gesekan,beberapa gaya eksternal harus diterapkan. Sistem
berisolasi seperti ini disebut isolator paksa atau dorong. Ketika perpindahan sistem dari
kesetimbangan besar,sistem ini tidak lagi linear. Sistem berosilasi seperti ini disebut nonlinear.
2.2 Osilator Linear dan Tidak Linear
Pertimbangkan sebuah partikel bermassa m bergerak dalam medan gaya konservatif dengan
energi konservatif dengan energi potensial V(x) dari partikel sebagai fungsi dari perpindahan.
Untuk medan gaya konservatif,energi total E dari partikel
𝐸 = 𝐾 + 𝑉 = 𝑘𝑜𝑛𝑠𝑡𝑎𝑛
1
Jika 𝑥̇ adalah kecepatan dari partikel, 𝐸 = 2 𝑚𝑥̇ 2 + 𝑉(𝑥)
Dimana jika kita selesaikan dalam 𝑥̇ mengahsilkan 𝑥̇ =
𝑑𝑦
𝑑𝑡
2
= ±√𝑚 [𝐸 − 𝑉(𝑥)]
Jika 𝐸 = 𝐸0 , kemudian 𝐸0 − 𝑉(𝑥) = 0 dan ,𝑥̇ = 0; partikel terletak diam pada kesetimbangan
yang stabil pada 𝑥 = 𝑥0 .
Posisi x(t) dari sebuah partikel bergerak dalam sumur potensial dapat ditemukan dengan
mengintegrasikan persamaan yaitu,
𝑚 𝑥2
𝑑𝑥
𝑡2 − 𝑡1 = √ ∫
2 𝑥1 √𝐸 − 𝑉(𝑥)
Sedangkan waktu periode T dari satu isolasi adalah
𝑥2
𝑇 = 2(𝑡2 − 𝑡1 ) = √2𝑚 ∫
𝑥1
3
𝑑𝑥
√𝐸 − 𝑉(𝑥)
Misalkan sebuah partikel berosilasi pada titik kesetimbangan 𝑥0 , dimana potensi minimum
adalah 𝑉(𝑥0 ) pada 𝑥 = 𝑥0 maka fungsi potensial dapat dituliskan sebagai :
1
1
4
𝑉(𝑥 ′ ) = 𝑘𝑥′2 + ∈ 𝑥 ′ + ⋯
2
4
Osilasi Linear
Dalam pendekatan pertama,kita dapat mengabaikan semua kecuai yang pertama yaitu:
𝑉(𝑥) =
1 2
𝑘𝑥
2
𝐹(𝑥) = −𝑘𝑥
𝑑2 𝑉
Disini 𝑘 = ( 𝑑𝑥 2 )
𝑑𝐹
𝑥−𝑥0
= − (𝑑𝑥 )
𝑥−𝑥0
Sejak (𝑑 2 𝑉 ⁄𝑑𝑥 2 )0 bernilai positif, k juga akan bernilai positif. Oleh karena itu gaya F(x) = - kx
selalu diarahkan menuju pusat dan sebanding dengan x. Gaya seperti ini disebut gaya pemulih
linear.
Osilasi non linear
Berbagai bentuk gaya dan potensial yang diilustrasikan untuk sistem dengan perpindahan yang
besar (sehingga tidak ada lagi linear). Untuk sistem non linear,yaitu:
𝐹(𝑥) = −𝑘𝑥−∈ 𝑥 3
Kita harus ingat ∈ yang merupakan jumlah yang sangat kecil dibandingkan dengan k,namun
besarnya dan tanda mempengaruhi hubungan linear –kx, gaya yang dihasilkan F(x).
2.3 Osilator Harmonic Sederhana
Osilator harmonik linear atau sederhana terdiri dari massa m terikat dengan pegas yang memiliki
konstanta gaya k. Sistem semi-massa berosilasi dalam satu dimensi sepanjang sumbu X pada
permukaan horizontal tanpa gesekan. Sistem ini memenuhi hukum hooke,maka sistem linear.
1
Mengukur perpindahan X dari posisi kesetimbangan energi potensial V(x) adalah 𝑉(𝑥) = 2 𝑘𝑥 2
sementara gaya pemulih F(x) adalah F(x) = -kx
4
Paradigma dari osilator harmonik klasik adalah sebuah benda dengan massa m, yang dipaksa
untuk bergetar dengan gaya F dan kontanta k. Gerakannya diatur oleh hukum Hooke:
(tentunya dengan mengabaikan gaya friksi) dan solusi umumnya adalah
di mana
yang merupakan frekuensi (anguler) osilasi. Energi potensialnya adalah
merupakan bentuk kurva parabola.
Tentunya, tak ada yang sesempurna seperti pada kasus osilator harmonik sederhana ini. Jika kita
membentangkan pegas terlalu panjang, bisa-bisa pegas tersebut akan berhenti bergetar karena
sudah melewati titik elastisitasnya dan juga hukum Hooke tidak akan berlaku untuk kasus yang
demikian. Tetapi praktisnya, potensial dapat didekati dengan fungsi parabola, di dalam titik
tetangga dari titik minimum. Formalnya, jika kita mengekspansi V(x) ke dalam deret Taylor di
sekitar titik minimum, maka
Bagilah dengan V(x0) [Kita juga bisa menambah konstanta sembarang pada V(x)selama tidak
mengubah gaya], misalkan
yang menggambarkan gerak oslilasi selaras sederhana (di sekitar titik 𝑥0 ), dengan konstanta
pegas efetif 𝑘 = 𝑉′′(𝑥0 ) Inilah kenapa oslilator selaras sederhana menjadi sangat penting dalam
5
mekanika kuantum, secara kasat mata gerak osilator adalah selaras sederhana selama nilai
amplitudonya kecil.
Permasalahan kuantum kali ini adalah menyelesaikan persamaan Shroedinger untuk potensial:
Seperti yang telah kita lihat, tujuan kita adalah menyelesaikan persamaan Shroedinger tidak
bergantung waktu.
Pada kebanyakan literatur, kita akan menjumpai dua pendekatan berbeda untuk permasalahan
seperti ini. Yang pertama adalah solusi dengan penekanan langsung pada persamaan diferensial
menggunakan metode “ekspansi power series”, cara ini sangat baik karena dapat digunakan
untuk menyelesaikan berbagai potensial lain.
2.4 Energi Osilator Harmonic Sederhana
Mari periksa energi mekanik dari suatu sistem di mana partikel mengalami gerak
harmonik sederhana, seperti sistem balok-pegas. Karena permukaan gesekan, sistem ini terisolasi
dan kita berharap total energi mekanik dari sistem akan konstan. Kita asumsikan pegas tak
bermassa, sehingga energi kinetik dari sistem sesuai hanya dengan balok. Kita dapat
menggunakan Persamaan untuk mengekspresikan energi kinetik balok sebagai:
6
K = ½ mv2 = ½ m2A2 sin2(t + )
Energi potensial elastis yang tersimpan dalam pegas untuk setiap perpanjangan x diberikan oleh
½ kx2 . Menggunakan persamaan didapatkan:
U= ½ kx2 = ½ kA2 cos2(t + )
Kita melihat bahwa K dan U selalu besaran positif atau nol. Karena 2 = k/m, kita dapat
mengekspresikan total energi mekanik dari osilator harmonik sederhana sebagai:
E = K + U = ½ kA2 [sin2(t + ) + cos2(t + )]
Dari identitas sin2 + cos2 =1, kita melihat bahwa besaran dalam kurung adalah kesatuan.
Oleh karena itu, persamaan ini tereduksi menjadi:
E = ½ kA2
Artinya, total energi mekanik dari osilator harmonik sederhana adalah konstan dari gerak dan
sebanding dengan kuadrat amplitudo. Total energi mekanik adalah sama dengan energi potensi
maksimum yang tersimpan dalam pegas ketika x = A karena v = 0 pada titik-titiknya dan tidak
ada energi kinetik. Pada posisi kesetimbangan, di mana U = 0 karena x = 0, total energi, semua
dalam energi kinetik, lagi ½ kA2.
Plot dari energi kinetik dan potensial terhadap waktu diperlihatkan dalam Gambar 15.9a,
di mana kita telah mengambil = 0. Pada setiap waktu, jumlah dari energi kinetik dan potensial
adalah konstan sebesar ½ kA2, energi total sistem.
Variasi dari K dan U dengan posisi x dari balok diplot pada Gambar 15.9b. Energi secara terus
menerus berubah antara energi potensial yang tersimpan dalam pegas dan energi kinetik balok.
Gambar 15.10 menggambarkan posisi, kelajuan, percepatan, energi kinetik, dan energi potensial
7
dari sistem balok-pegas untuk satu periode penuh dari gerak. Sebagian besar ide yang dibahas
sejauh ini digabungkan dalam angka penting ini. Pelajari dengan seksama.
Akhirnya,
kita
dapat
memperoleh
kelajuan
balok
pada
posisi
sembarang
mengekspresikan energi total sistem di beberapa posisi x sembarang sebagai:
E = K + U = ½ mv2 + ½ kx2 = ½ kA2
8
dengan
Ketika Anda memeriksa Persamaan di atas untuk melihat apakah itu sesuai dengan kasus yang
diketahui, Anda menemukan bahwa ini memverifikasi bahwa kecepatan maksimum pada x = 0
dan nol pada titik balik x = A.
2.5 Persamaan Osilasi
Pada gambar di bawah ditunjukkan suatu sistem pegas-massa yang dikenal dengan gaya
luar hingga mengalami osilasi paksa. Gaya dorong dari luar diamsumsikan diberikan secara
periodic.
Bila pada sistem pegas-massa tersebut beban bermassa m, pegas mempunyai kekakuan
dengan konstanta pegas k, besar redaman di sekitar sistem dinyatakan oleh faktor redaman b, dan
gaya periodic penyebab osilasi dalam F(t), maka menurut hokum kedua Newton persamaan
gerak beban selama osilasi berlangsung dinyatakan dalam bentuk :
m
𝑑2𝑥
𝑑𝑡 2
+ 𝑏
𝑑𝑥
𝑑𝑡
+ kx = F (t)
9
Gaya luar periodic F(t) umumnya dalam bentuk fungsi sinus dan fungsi cosinus. Persamaan
gerak pada sistem osilasi paksa ini ternyata identik dengan persamaan yang menggambarkan
aliran arus bolak-balik (I) dalam sistem RLC ketika dihubungkan dengan sumber bolak-balik
V(t) yaitu :
L
𝑑𝑙
𝑑𝑡
𝑞
+ RI + = V (t)
𝑐
Atau dalam persamaan diferensial yang menyatakan aliran muatan q adalah :
L
𝑑2𝑞
𝑑𝑡 2
+R
Dengan I =
𝑑𝑞
𝑑𝑡
𝑑𝑞
𝑑𝑡
𝑞
+ = V (t)
𝑐
. Besaran C adalah kapasintasi kapasitor yang akan dimuati, L adalah induktansi
dari lilitan yang digunakan dan R adalah besar hambatan listrik yang berfungsi sebagai pembatas
arus listrik.
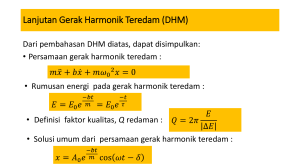
2.6 Persamaan Gerak Osilasi Redaman
Setiap gerak yang terjadi secara berulang / bolak-balik dalam selang waktu yang sama
dan melalui titik kesetimbangan disebut gerak periodik. Karena gerak ini terjadi secara teratur
maka disebut juga gerak harmonik. Apabila suatu partikel melakukan gerak periodik pada
lintasan sama serta perubahan medan yang periodik maka gerakannya disebut gerak osilasi/
getaran. Bentuk sederhana dari gerak periodik adalah osilasi dari pegas. Karenanya kita
menyebutnya gerak harmonis sederhana.
Gerak harmonik sederhana disebabkan oleh adanya gaya pemulih atau gaya balik linear
(F), yaitu resultan gaya yang arahnya selalu menuju titik kesetimbangan dan besarnya sebanding
dengan simpangannya. Gaya pemulih ini arah gaya selalu berlawanan dengan arah simpangan.
Sehingga :
𝐹 = −𝑘𝑥
Dimana :
k = konstanta pegas.
x = simpangan pegas (m)
10
F = gaya pemulih (N)
Jika faktor dan gaya pemulih osilasi di substitusikan dengan hukum II Newton, maka :
𝑑²𝑥
𝑑²𝑥
𝐹 = 𝑚 𝑑𝑡 2
−𝑘𝑥 = 𝑚 𝑑𝑡 2
-kx
𝑑²𝑥
𝑚 𝑑𝑡 2 + 𝑘𝑥 = 0
𝑑2 𝑥
𝑑𝑡 2
𝑘
+𝑚𝑥 = 0
𝑘
Sehingga 𝜔 = √𝑚
2𝜋
𝑇
mg
𝑘
= √𝑚
𝑚
𝑇 = 2𝜋√ 𝑘
Dalam keadaan nyata, osilasi lama kelamaan akan melemah menjadi diam (teredam). Hal
terseebut karena adanya gaya gesek benda dengan lingkungan. Pengaruh gaya gesek inilah yang
disebut dengan gaya non konservatif. Gaya gesek akan menyebabkan amplitudo benda yang
berosilasi secara perlahan menurun terhadap waktu. Sehingga benda tidak berosilasi lagi (diam).
Dengan kata lain bahwa gaya gesek menyebabkan benda tersebut kembali setimbang.
Gaya gesek tersebut dinyatakan dengan :
𝑅 = −𝑏𝑣
𝑅 = −𝑏
Dengan :
R = gaya gesek (N)
b = konstanta redaman
v = cepat rambat gelombang (m/s)
x = simpangan (m)
11
𝑑𝑥
𝑑𝑡
t = waktu (s)
Jika faktor gaya gesek dan gaya pemulih osilasi di substitusikan dengan hukum II Newton, maka
:
𝑑²𝑥
𝑑𝑥
𝑚 𝑑𝑡² = −𝑘𝑥 − 𝑏 𝑑𝑡
𝑑²𝑥
𝑑𝑥
𝑑
𝑚 𝑑𝑡² + 𝑏 𝑑𝑡 + 𝑘𝑥 = 0 ; asumsikan 𝐷 = 𝑑𝑡
(𝑚𝐷² + 𝑏𝐷 + 𝑘)𝑥 = 0
Jadi persamaan karakteristiknya : 𝑚𝐷² + 𝑏𝐷 + 𝑘 = 0
𝑏
𝑘
𝐷² + 𝑚 𝐷 + 𝑚 = 0
Akar dari persamaan ini adalah
𝑏
𝑏
𝑘
𝑏
𝜆1,2 = − 2𝑚 ± √(2𝑚) ² − 𝑚 ; asumsikan = 2𝑚
𝜆₁‚₂ = − ± √² − 𝜔²
Dengan disebut faktor redaman per satuan massa
Sehingga solusinya adalah :
(𝑡) = 𝐶1 𝑒 ₁𝑡 + 𝐶2 𝑒 ₂𝑡
(𝑡) = 𝐶1 𝑒 (− +√ ²−𝜔²)𝑡 + 𝐶2 𝑒 (− −√ ²−𝜔²)𝑡
...(1.1)
(𝑡) = 𝑒 − 𝑡 (𝐶1 𝑒 √ ²−𝜔² + 𝐶2 𝑒 −√ ²−𝜔² )
...(1.2)
Dimana : 𝑒 − 𝑡 adalah faktor redaman.
Untuk lebih memahami osilasi teredam ada tiga kasus yang terjadi, yaitu :
1. Apabila 2 ≪ 2 , maka √² − 𝜔² = 𝑖𝜔, sehingga persamaan (1.2) menjadi :
(𝑡) = 𝑒 − 𝑡 (𝐶1 𝑒 𝑖𝑡 + 𝐶2 𝑒 −𝑖𝑡 )
dan bila C1=C2, maka :
(𝑡) = 𝐶𝑒 − 𝑡 (𝑒 𝑖𝑡 + 𝑒 −𝑖𝑡 )
(𝑡) = 𝐶𝑒 − 𝑡 (𝑒 𝑖𝑡 + 𝑒 −𝑖𝑡 )
12
...(1.3)
(𝑡) = 𝐴𝑒 − 𝑡 𝑠𝑖𝑛(𝑡 + )
...(1.4)
Pada kasus ini disebut dengan osilasi teredam kurang (underdamped oscilation). Dari persamaan
(1.4) tampak bahwa osilasi ini sama dengan osilasi sederhana, namun yang berbeda adalah
amplitudonya (berubah secara exponensial. Grafik untuk osilasi teredam kurang adalah sebagai
berikut:
X
t
Grafik osilasi teredam kurang
2. Apabila 2 ≫ 2 , maka √² − 𝜔² = 𝑖, sehingga persamaan (1.2) menjadi :
(𝑡) = (𝐶1 𝑒 0 + 𝐶2 𝑒 −𝑖𝑡 )
(𝑡) = 𝐴 + 𝐵𝑒 −𝑖𝑡
Osilasi semacam ini disebut osilasi teredam (overdamped oscilation).
3. Apabila 2 = 2 , maka persamaan (1.2) menjadi :
(𝑡) = 𝑒 −𝑡 (𝐶1 𝑒 0 + 𝐶2 𝑒 0 )
(𝑡) = 𝑒 −𝑡 (𝐶1 + 𝐶2 )
Osilasi ini disebut teredam kritis (critically oscilation).
Teredam lebih
Teredam kritis
13
Grafik osilasi teredam lebih dan teredam kritis.
Untuk konstanta redaman b yang cukup kecil, b² < 4mk dalam kasus teredam kurang maka solusi
persamaannya dapat dituliskan:
𝜆1,2 = −
𝑏
𝑘
𝑏
± 𝑖√ − ( ) ²
2𝑚
𝑚
2𝑚
𝜔² = √𝜔0 ² − 𝑟²
𝑏
𝑘
Dimana 𝑟 = 2𝑚 dan 𝜔0 = √𝑚 maka,
2𝜋𝑓 = √
𝑘
𝑏²
−
𝑚 4𝑚²
Dengan :
ω = frekuensi angular redaman ; 𝜔 = 2𝜋𝑓
𝑘
ω0= frekuensi angular alami ; 𝜔𝑜 ² = 𝑚
𝑏²
r = konstanta redaman per satuan massa ; 𝑟² = 4𝑚
Untuk menghitung konstanta redaman pada fluida tertentu digunakan persamaan :
𝑘
𝑏²
2𝜋𝑓 = √
−
𝑚𝑏 4𝑚𝑏 ²
4𝜋²𝑓² =
𝑘
𝑏²
−
𝑚𝑏 4𝑚𝑏 ²
𝑏²
𝑘
=
− 4𝜋²𝑓²
4𝑚𝑏 ² 𝑚𝑏
𝑘
𝑏² = (4𝑚𝑏 ²) (
− 4𝜋²𝑓²)
𝑚𝑏
14
𝑘
𝑏 = √(4𝑚𝑏 ²) (
− 4𝜋²𝑓²)
𝑚𝑏
𝑏 = √4(𝑚𝑏 )² {
𝑘
2𝜋 2
−( ) }
𝑚𝑏
𝑇
𝑘
2𝜋 2
𝑏 = 2𝑚𝑏 √
−( )
𝑚𝑏
𝑇
15
BAB III
PENUTUP
3.1 Kesimpulan
Jika sebuah sistem dalam kesetimbangan stabil statis atau dinamis ,ketika sistem tersebut
dipindahkan sedikit dari posisi kesetimbangan,gerak osilasi yang dihasilkan disebut gerak
harmonik. Untuk menjaga gerak osilasi dalam gesekan,beberapa gaya eksternal harus diterapkan.
Sistem berisolasi seperti ini disebut isolator paksa atau dorong. Ketika perpindahan sistem dari
kesetimbangan besar,sistem ini tidak lagi linear. Sistem berosilasi seperti ini disebut nonlinear.
Osilator harmonik linear atau sederhana terdiri dari massa m terikat dengan pegas yang
memiliki konstanta gaya k. Sistem semi-massa berosilasi dalam satu dimensi sepanjang sumbu X
pada permukaan horizontal tanpa gesekan. Sistem ini memenuhi hukum hooke,maka sistem
linear. Mengukur perpindahan X dari posisi kesetimbangan energi potensial V(x) adalah 𝑉(𝑥) =
1
2
𝑘𝑥 2 sementara gaya pemulih F(x) adalah F(x) = -kx
3.2 Saran
Dengan adanya makalah ini, penulis berharap makalah ini dapat dijadikan sebagai bahan
referensi dalam memahami dunia fisika khususnya mengenai mekanika. Makalah ini juga dapat
dijadikan sebagai bahan ajar. Dan mudah-mudahan dapat bermanfaat dalam kehidupan seharihari.
16
DAFTAR PUSTAKA
Bukit, N. Ginting, E. 2015. Mekanika. Unimed Press: Medan
https://www.academia.edu/6434338/GETARAN_TEREDAM_2
17