BAB II
DASAR TEORI
II. 1
Sistem Tenaga Listrik
Salah satu cara yang paling ekonomis, mudah, dam aman untuk mengirimkan
daya listrik adalah dalam bentuk daya listrik [1]. Daya listrik tersebut sudah diatur dalam sebuah
sistem yang disebut dengan istilah sistem daya listrik dimana didalamnya terdapat komponen –
komponen mulai dari pembangkit sampai kepada pelanggan yang menyebabkan daya listrik
dapat memenuhi kebutuhan hidup manusia. Suatus sistem energi listrik pada umumnya terdiri
atas empat unsur, yaitu pembangkit, transmisi, distribusi dan pemakaian tenga listrik atau beban.
Pada pusat pembangkit, energi primer banyak berasal dari sumber daya alam, seperti Pusat
Listrik Tenaga Panas Bumi (PLTP), Pusat Listrik Tenaga Uap (PLTU), Pusat Listrik Tenaga
Bayu (PLTB), Pusat Listrik Tenaga Gas, dan masih banyak lagi energi primer lainnya yang di
konversikan menjadi energi listrik. Daya listrik yang dibangkitkan di pusat tenaga listrik harus
disalurkan atau ditransmisikan ke pusat – pusat pemakai melalui kawat (saluran) [2].
Dalam sistem tenaga listrik, generator sinkron pada pusat pembangkit mengubah energi
mekanis yang dihasilkan pada poros turbin menjadi energi listrik tiga fasa. Lalu melalui
transformator penaik tegangan (step up transformer) energi listrik ini kemudian dikirimkan
melalui saluran transmisi bertegangan tinggi menuju pusat – pusat beban [1]. Ketika saluran
transmisi mencapai pusat beban, tegangan tersebut kembali diturunkan menjadi tegangan
menengah, melalui transformator penurun tegangan (step down transformer). Lalu daya listrik
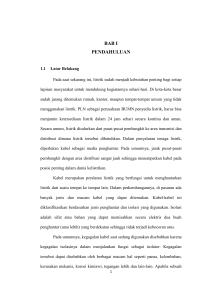
akan dipasok ke seluruh pelanggan melalui transformator distribusi. Sistem pengadaan daya
listrik ini dapat digambarkan seperti gambar 2.1 berikut.
Gambar 2.1 Sistem Pengadaan Energi Listrik [3]
Dalam saluran transmisi, apabila disalurkan tenaga listrik bertegangan tinggi ke pusat –
pusat beban dalam jumlah besar, maka saluran distribusi berfungsi membagikan tenaga listrik
tersebut kepada pihak pemakai melalui saluran tegangan rendah. Seperti yang sudah dijelaskan
diatas bahwa generator sinkron di pusat pembangkit biasanya menghasilkan tenaga listrik
dengan tegangan antara 6 – 20 kV yang kemudian, dengan bantuan transformator, tegangan
tersebut dinaikkan menjadi 150 – 500 kV. Saluran tegangan tinggi (STT) menyalurkan tenaga
listrik menuju pusat penerima; disini tegangan diturunkan menjadi tegangan subtransmisi 70
kV. Pada Gardu Induk (GI), tenaga listrik yang diterima kemudian dilepaskan menuju trafo
distribusi dalam bentuk tegangan menengah 20 kV. Melalui trafo distribusi yang tersebar di
berbagai pusat – pusat beban, tegangan distribusi primer ini diturunkan menjadi tegangan rendah
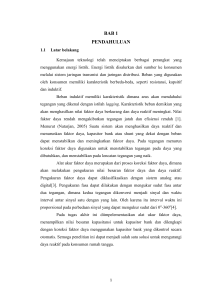
distribusi. Penjelasan ini dapat digambarkan pada gambar 2.2. [1]. Penyaluran energi listrik
melalui jarak yang jauh yang dilakukan dengan menaikkan tegangan guna memperkecil
kerugian yang terjadi, berupa rugi – rugi daya.[4]
Gambar 2.2 Skema Tegangan Pembangkit Sampai ke Beban
II. 2 Transmisi Daya Listrik
Sistem tenaga listrik seperti yang dijelaskan diatas terdiri dari beberapa komponen dan
salah satunya adalah jaringan transmisi. Transmisi tenaga listrik merupakan proses penyaluran
tenaga listrik dari tempat pembangkit tenaga listrik (Power Plant) hingga substation distribution
sehingga dapat disalurkan sampai pada konsumen penguna listrik melalui satu bahan konduktor.
Gambar 2. 3 Single Line Diagram of Genereation, Transmission, and Distribution
Gambar diatas menunjukkan blok diagram dasar dari sistem transmisi dan distribusi
tenaga listrik. Yang terdiri dari dua stasiun pembangkit. Transmisi berada pada bagian yang
diarsir tebal. Fungsi dari bagian transmission substation menyediakan servis untuk merubah
dalam menaikkan dan menurunkan tegangan pada saluran tegangan yang ditransmisikan serta
meliputi regulasi tegangan. Standarisasi range tegangan internasional yaitu 345 kV hingga 765
kV untuk Saluran Tegangan Ekstra Tinggi (SUTET) dan 115 kV hingga 230 kV untuk Saluran
Tegangan Tinggi (SUTT) [ Gonan Turen]. Sementara standarisasi tegangan transmisi di
Indonesia adalah 500 kV untuk SUTET dan 150 kV untuk SUTT. Pada sistem tenaga listrik,
jarak antara pembangkit dengan beban yang cukup jauh, akan menimbulkan adanya penurunan
kualitas tegangan yang diakibatkan oleh rugi – rugi pada jaringan. Sehingga dibutuhkan suatu
peralatan untuk memperbaiki kualitas tegangan dan diletakkan pada saluran yang mengalami
drop tegangan. SVC (Static Var Compensator) berfungsi sebagai pemelihara kestabilan kondisi
steady state dan dinamika voltase dalam batasan yang sudah ditentukan pada jaringan transmisi
berjarak jauh dan berbeban tinggi (heavily loaded). Synchronous Condenser, sebagai generator
pensuplay arus gangguan, dan transformer dengan taps yaang variabel, Ini adalah jenis khusus
transformator listrik yang dapat menambah atau mengurangi powered gulungan kawat, sehingga
meningkatkan atau menurunkan medan magnet dan tegangan keluaran dari transformator.
Distribution Substation, pada bagian ini merubah tegangan aliran listrik dari tegangan medium
menjadi tegangan rendah dengan transformator step-down, dimana memiliki tap otomatis dan
memiliki kemampuan untuk regulator tegangan rendah. Tegangan rendah meliputi rentangan
dari 120/240V single phase sampai 600V, 3 phase. Bagian ini melayani perumahan, komersial
dan institusi serta industri kecil. Interconnecting substation, pada bagian ini untuk melayani
sambungan percabangan transmisi dengan power tegangan yang berbeda serta untuk menambah
kestabilan pada keseluruhan jaringan. Setiap substation selalu memiliki Circuit Breakers, Fuses,
lightning arresters untuk pengaman peralatan. Antara lain dengan penambahan kontrol
peralatan, pengukuran, switching, pada setiap bagian substation. Energi listrik yang di
transmisikan didisain untuk Extra-high Voltage (EHV), High Voltage (HV), Medium Voltage
(MV), dan Low Voltage (LV). Klasifikasi nilai tegangan ini dibuat berdasarkan skala
standarisasi tegangan yang di tunjukkan pada tabel.
Menurut sistem saluran transmisi dikenal sistem bolak – balik (AC = Alternating
Current) dan sistem arus searah (DC = Direct Current). Pada sistem AC penaiikkan dan
penurunan tegangan mudah dilakukan yaitu dengan menggunakan transformator. Itulah
sebabnya maka sampai dewasa ini saluran transmisi di dunia sebagian besar menggunakan
sistem AC. Tetapi sudah ada yang menerapkan sistem DC di beberapa negara seperti Amerika
Serikat. Didalam sistem AC ada yang menggunakan sistem satu fasa dan sistem tiga fasa. Sistem
tiga fasa mempunyai kelebihan dibandingkan dengan sistem satu fasa karena,
a. Daya yang disalurkan lebih besar
b. Nilai sesaat (Instantaneous value) konstan dan
c. Mempunyai medan magnit putar.
Berhubung dengan keuntungan – keuntungan yang dimiliki, hamper seluruh penyaluran
tenaga listrik di dunia dilakukan dengan arus bolak balik. Namun seperti disebutkan diatas, saat
ini penyaluran arus searah mulai dikembangkan di beberapa negara di dunia. Penyaluran dengan
sistem DC mempunyai keuntungan, karena isolasi yang lebih sederhana, efisiensi lebih tinggi
(karena factor dayanya satu) serta tidak ada masalah stabilitas, sehingga dimungkinkan
penyaluran tenaga listrik jarak jauh. Tetapi satu yang harus diperhatikan yaitu masalah
ekonomis yang harus diperhitungkan. Untuk daya yang sama maka daya guna penyaluran akan
naik oleh karena rugi – rugi transmisi akan turun, apabila tegangan transmisi dinaikkan. Namun
penaikkan tegangan transmisi berarti juga kenaikkan isolasi, biaya peralatan dan biaya gardu
induk. Oleh karena itu pemilihan tegangan transmisi dilakukan dengan dengan
memperhitungkan daya yang disalurkan, jumlah rangkaian, jarak penyaluran, keandalan
(reliability). Biaya peralatan untuk tegangan tertentu, serta tegangan – tegangan yang sekarang
dan yang direncanakan. Kecuali itu, penentuan tegangan harus dilihat juga dari segi strandarisasi
peralatan yang ada.
2.3 Karakteristik Listrik dari Saluran Transmisi
Saluran transmisi listrik mempunyai empat parameter yang mempengaruhi
kemampuannya untuk berfungsi sebagai bagian dari suatu sistem tenaga, yaitu resistansi,
induktansi, kapasitansi dan konduktansi. Parameter-parameter ini merupakan salah satu
pertimbangan utama dalam perencanaan saluran transmisi. Impedansi seri dibentuk oleh
resistansi dan induktansi yang terbagi rata disepanjang saluran. Sedangkan konduktansi dan
kapasitansi yang terdapat diantara penghantar-penghantar dari suatu saluran fasa-tunggal atau
di antara sebuah penghantar dan netral dari suatu saluran tiga-fasa membentuk admitansi paralel.
Dalam perhitungan, rangkaian saluran ekivalen yang dibentuk dari parameter-parameter
dijadikan satu meskipun resistansi, induktansi dan kapasitansi tersebut terbagi merata di
sepanjang saluran.
2.3.1
Resistansi
Resistansi efektif (R) dari suatu penghantar adalah :
𝑃
R = 𝐼2 (Ω)
(2.1)
dimana P = rugi daya pada penghantar (Watt)
I = arus yang mengalir (Ampere)
Resistansi efektif sama dengan resistansi dari saluran jika terdapat distribusi arus yang
merata (uniform) di seluruh penghantar. Distribusi arus yang merata di seluruh penampang suatu
penghantar hanya terdapat pada arus searah, sedangkan tidak pada arus bolak balik.
Resistansi DC dapat dihitung dengan persamaan dibawah ini
𝑙
Ro = 𝜌 𝐴
Dimana
ρ = resistivitas penghantar ( Ω.m)
𝑙 = panjang penghantar (m)
A = luas penampang (𝑚2 )
(2.2)
Dengan meningkatnya frekuensi bolak – balik, distribusi arus makin tidak merata (nonuniform).
Peningkatan frekuensi ini juga mengakibatkan tidak meratanya kerapatan arus (current density),
disebut juga efek kulit (skin effect) [5].
Untuk penghantar dengan jari – jari yang cukup besar ada kemungkinan terjadi
kerapatan arus yang berisolasi terhadap jarak radial dari titik tengah penampang penghantar.
Fluks bolak balik mengimbaskan tegangan yang lebih tinggi pada serat – serat di bagian dalam
daripada di sekitar permukaan penghantar,, karena fluks yang meliputi serat dekat permukaan
penghantar lebih sedikit daripada fluks yang meliputi serat di bagian dalam penghantar.
Berdasarkan hukum Lenz, tegangan yang diimbaskan akan melawan perubahan arus yang
menyebabkannya, dan meningkatnya tegangan imbas pada serat -serat di bagian dalam
menyebabkan meningkatnya kerapatan arus pada serat – serat yang lebih dekat ke permukaan
penghantar dan karena itu resistansi efektifnya meningkat [ buku chapman]. Sehingga dapat
dikatakan pada arus bolak – balik arus cenderung mengalir melalui permukaan penghantar.
Perhitungan resistansi total suatu saluran transmisi ditentukan oleh jenis penghantar
pabrikan, biasanya pabrikan akan memberikan table karakteristik listrik dari penghantarr yang
dibuatnya, termasuk diantaranya nilai resistansi AC penghantar dalam satuan Ω/km (standard
internasional) atau Ω/mi (American Standard). Nilai resistansi juga dipengaruhi oleh suhu,
ditunjukkan oleh persamaan berikut
𝑅2 = 𝑅1 [1 + 𝛼(𝑇2 − 𝑇1 )]
(2.3)
Dimana 𝑅2 dan 𝑅1 adalah resistansi pada suhu 𝑇1 dan 𝑇2 , dan α adalah koefisien suhu
dari resistansi, yang nilainya tergantung dari bahan konduktor.
2.3.2 Induktansi
Induktansi adalah sifat rangkaian ang menghubungkan tegangan yang diimbaskan oleh
perubahan fluks dengan kecepatan perubahan arus [ William Stevenson]. Persamaan awal yang
dapat menjelaskan induktansi adalah menghubungkan tegangan imbas dengan kecepatan
perubahan fluks yang meliputi suatu rangkaian.
Tegangan imbas adalah :
𝑒=
𝑑𝜏
𝑑𝑡
(2.4)
𝑒 = tegangan imbas (volt)
Dimana
𝜏 = banyaknya fluks gandeng rangkaian (weber-turns)
Banyaknya weber-turns adalah hasil perkalian masing – masing weber dari fluks dan
jumlah lilitan dari rangkaian yang digandengkannya. Jika arus pada rangkaian berubah – ubah,
medan magnet yang ditimbulkannya akan turut berubah – ubah. Jika dimisalkan bahwa media
dimana medan magnet ditimbulkan mempunyai permeabilitas yang konstan, banyaknya fluks
gandeng berbanding lurus degan arus, dan karena itu tegangan imbasnya sebanding dengan
kecepatan perubahan arus.
𝑑𝑖
𝑒=𝐿
𝑑𝑡
(2.5)
Dimana 𝑒 = tegangan imbas (Volt)
L = induktansi (H)
𝑑𝑖
= kecepatan perubahan arus (A/s)
𝑑𝑡
Dari persamaan 2.3 dan 2.4 maka didapat persamaan umum induktansi saluran dalam
satuan Henry, yaitu
𝐿=
𝜏
(2.6)
𝑖
dengan 𝑖 adalah arus yang mengalir pada saluran transmisi dalam satuan ampere (A).
Induktansi timbal-balik antara dua rangkaian didefinisikan sebaga fluks gandeng pada
rangkaian pertama yang disebabkan oleh arus pada rangkaian kedua per ampere arus yang
mengalir di rangkaian kedua. Jika arus 𝐼2 menghasilkan fluks gandeng dengan rangkaian 1
sebanyak 𝜓12 , maka induktansi timbal balik nya adalah
𝑀12 =
Dimana
𝜓12
𝐼2
(2.7)
𝜓12 = fluks gandeng yang dihasilkan 𝐼2 terhadap rangkaian 1 (Wbt)
𝐼2
= arus yang mengalir padad rangkaian kedua.
Pada saluran tiga fasa induktansi rata – rata satu penghantar pada suatu saluran
ditentukan dengan persamaan
𝐿𝑎 = 2 𝑥 10−7 ln
𝐷𝑒𝑞
𝐿𝑎 = 2 𝑥 10−7 ln
𝐷𝑒𝑞
𝐷𝑠
𝐷𝑠𝑏
(H / m) untuk penghantar tunggal,
(H / m) untuk penghantar berkas.
dengan 𝐷𝑒𝑞 = 3√𝐷12 𝐷23 𝐷31 dan 𝐷𝑠 adalah GMR penghantar tunggal dan 𝐷𝑠𝑏 adalah GMR
penghantar berkas. Nilai 𝐷𝑠𝑏 akan berubah sesuai dengan jumlah lilitan dalam suatu berkas.
Untuk suatu berkas dua-lilitan
4
𝐷𝑠𝑏 𝑐 = √( 𝑟 𝑥 𝑑 )2 = √𝑟 𝑥 𝑑
Untuk suatu berkas tiga-lilitan
9
3
𝐷𝑠𝑏 𝑐 = √( 𝑟 𝑥 𝑑 𝑥 𝑑 )3 = √𝑟𝑑 2
Untuk suatu berkas empat-lilitan
16
1
4
𝐷𝑠𝑏 𝑐 = √( 𝑟 𝑥 𝑑 𝑥 𝑑 𝑥 𝑑 𝑥 22 )4 = 1,09√𝑟𝑑3
Persamaan diatas merupakan persamaan untuk saluran yang telah ditransposisikan, yaitu suatu
mode pengembalian keseimbangan ketiga fasa dengan mempertukarkan posisi – posisi
penghantar pada selang jarak yang teratur di sepanjang saluran sedemikian rupa sehingga setiap
penghantar akan menduduki posisi semula penghantar yang lain pada suatu jarak yang sam, lihat
Gambar 2.4
Gambar 2. 4 Siklus Transposisi
Persamaan ini juga dapat digunakan untuk saluran tiga fasa dengan jarak pemisah tidak simetris
karena ketidaksimetrisan antara fasa – fasa nya adalah kecil saja sehingga dapat diabaikan pada
kebanyakan perhitungan induktansi.
2.3.3 Kapasitansi
Kapasitansi suatu saluran transmisi adalah akibat beda potensial antara penghantar, baik
antara penghantar – penghantar maupun antara penghantar tanah. Kapasitansi menyebabkan
penghantar tersebut bermuatan seperti yang terjadi pada pelat kapasitor bila terjadi beda
potensial diantaranya. Untuk menentukan nilai kapasitansi antara penghantar – penghantar
ditentukan dengan persamaan
𝐶𝑎𝑏 =
𝜋𝑘
𝐷
𝑟
ln( )
(𝐹 /𝑚).
2.8
Jika saluran dicatu oleh suatu transformer yang mempunyai sadapan tengah yang
ditanahkan, beda potensial antara kedua penghantar tersebut dan kapasitansi ke tanah
(kapasitansi ke netral), adalah muatan pada penghantar per satuan beda potensial antara
penghantar dengan tanah. Jadi kapasitansi ke netral untuk saluran dan kawat adalah dua kali
kapasitansi antara penghantar – penghantar.
𝐶𝑎𝑛 =
Dimana
2𝜋𝑘
𝐷
𝑟
ln( )
(𝐹 /𝑚).
𝐶𝑎𝑏 = kapasitansi antara penghantar a – b (F/m)
2.9
𝐶𝑎𝑛 = kapasitansi antara penghantar – tanah (F/m)
𝑘
= permeabilitas bahan dielektrik
𝐷
= jarak antara penghantar (m)
r
= jari – jari antara penghantar (m)
Persamaan (2.9) juga dapat digunakan untuk menentukan kapasitansi saluran tiga-fasa
dengan jarak pemisah yang sama. Jika penghantar pada saluran tiga-fasa tidak terpisah dengan
jarak yang sama, kapasitansi masing – masing fasa ke netral tidak sama. Namun untuk susunan
penghantar yang biasa, ketidaksimetrian saluran yang ditransposisikan, nilai kapsitansi fasa ke
netral ditentukan dengan persamaan
𝐶𝑛 =
𝐶𝑛 =
2𝜋𝑘
𝐷𝑒𝑞
)
𝑟
ln(
2𝜋𝑘
𝐷𝑒𝑞
ln( 𝑏 )
𝐷𝑠 𝑐
(𝐹 /𝑚) untuk penghantar tunggal
(𝐹 /𝑚) untuk penghantar berkas.
Dengan 𝐷𝑒𝑞 adalah GMR penghantar, 𝑟 adalah jari – jari penghantar dan 𝐷𝑠𝑏 𝑐 adalah
GMR penghantar berkas. Nilai 𝐷𝑠𝑏 𝑐 akan berubah sesuai dengan jumlah lilitan dalam suatu
berkas.
Untuk suatu berkas dua-lilitan
4
𝐷𝑠𝑏 𝑐 = √(𝑟 𝑥 𝑑)2 = √𝑟 𝑥 𝑑
Untuk suatu berkas tiga- lilitan
9
3
𝐷𝑠𝑏 𝑐 = √(𝑟 𝑥 𝑑 𝑥 𝑑)3 = √𝑟𝑑 2
Untuk suatu berkas empat-lilitan
16
1
4
𝐷𝑠𝑏 𝑐 = √(𝑟 𝑥 𝑑 𝑥 𝑑 𝑥 𝑑 𝑥 22 )4 = 1,09√𝑟𝑑 3
Untuk menghitung kapasitansi saluran kabel ke tanah perlu menggunakan metode
muatan bayangan, lihat gambar 2.9. Pada metode ini bumi dapat diumpamakan dengan suatu
penghantar yang bermuatan di bawah permukaan bumi pada jarak yang sama dengan penghantar
asli diatas bumi. Penghantar semacam itu mempunyai muatan yang sama tetapi berlawanan
tanda dengan penghantar aslinya dan disebut penghantar bayangan. Jika ditempatkan satu
penghantar bayangan untuk setiap penghantar atas-tiang, fluks antara penghantar asli dengan
bayangannya adalah tegak lurus pada bidang yang menggantikan bumi, dan bidang itu adalah
permukaan ekiptensial. Fluks diatas bidang itu adalah sama seperti bila bumi ada tanpa adanya
penghantar bayangan. Persamaan untuk menentukan kapasitansi saluran kabel ke tanah adalah
:
2𝜋𝑘
𝐶𝑛 =
𝐷𝑒𝑞
ln( 𝐵 )−(
𝐷𝑆 𝑆
Dimana
𝐶𝑛
3 𝐻
√ 12′ 𝐻23′ 𝐻31′
3
√𝐻1 𝐻2 𝐻3
2.10
)
= kapasitansi saluran kabel ke tanah (F/m)
𝐻12′ = jarak antara penghantar 1 dengan penghantar bayangan 2 (m)
𝐻23′ = jarak antara penghantar 2 dengan penghantar bayangan 3 (m)
𝐻31′ = jarak antara penghantar 3 dengan penghantar bayangan 1 (m)
𝐻1
= jarak antara penghantar 1 dengan permukaan bumi (m)
𝐻2
= jarak antara penghantar 2 dengan permukaan bumi (m)
𝐻3
= jarak antara penghantar 3 dengan permukaan bumi (m)
Gambar 2.5 Metode Muatan Bayangan
2.4 Model Saluran Transmisi
Dalam mempelajari karakteristik penyaluran daya yang meliputi variabel – variabel
tegangan, arus, dan hilang daya, dapat dilakukan dengan menggunakan dua pendekatan yang
berbeda yaitu :
a. Rangkaian yang parameter atau konstanta – konstantanya dikonsentrasikan (lumped),
pendekatan ini digunakan untuk analisis saluran transmisi jarak pendek
b. Rangkaian yang parameter atau konstanta – konstantanya didistribusikan sepanjang
saluran transmisi.
Beberapa perhitungan penting untuk analisis transmisi adalah :
a. Menghitung perbedaan besaran antara tegangan pada pangkal pengiriman (𝑉𝑠 )
dengan tegangan pada ujung penerimaan (𝑉𝑅 ).
b. Menghitung daya pada pangkal pengiriman dan ujung penerimaan
c. Menghitung daya guna transmisi (daya keluar/daya masuk)
2.4.1
Saluran Transmisi Pendek
Pada sebuah saluran transmisi pendek (hingga 50 mil atau 80 km), kapasitansi dan
resistansi bocor ke tanah biasanya diabaikan seperti terlihat pada Gambar 2.6. Oleh karena itu
saluran transmisi pendek dapat disederhanakan dengan merebut konstanta impedansi seperti
berikut :
𝑍 = 𝑅 + 𝑗𝑋𝑙
= 𝑧𝑙
= 𝑟𝑙 + 𝑗𝑥𝑙 Ω
Dengan :
𝑍
: Impedansi seri total per fasa dalam Ohm
𝑧
: Impedansi seri dari penghantar dalam Ohm per satuan unit panjang
𝑋𝑙
: Reaktansi induktif total dari penghantar dalam Ohm
𝑥
: Reaktansi induktif dari penghantar dalam Ohm per satuan panjang
𝑙
: Panjang saluran
Arus yang masuk di ujung kirim saluran sama dengan arus yang keluar di ujung terima
saluran. Untuk mempermudah pemahaman, berikut ini adalah gambar rangkaian ekuivalen
saluran transmisi pendek. Pada hal ini nilai kapasitansi diabaikan.
Gambar 2.6 Gambar Rangkaian Ekuivalen Saluran Transmisi Pendek
Dari persamaan dan gambar diatas diperoleh relasi tegangan dan arus
𝑉𝑠 = 𝑉𝑅 + 𝑍𝐼𝑅
2.11
𝐼𝑠 = 𝐼𝑅
2.12
Dengan :
𝑉𝑠
: Tegangan fasa (saluran ke netral) diujung kirim
𝑉𝑅
: Tegangan fasa (saluran ke netral) diujung terima
𝐼𝑠
: Arus fasa diujung kirim
𝐼𝑅
: Arus fasa diujung terima
𝑍
: Impedansi seri total per fasa
Sementara untuk pengaturan tegangan ke voltage regulation didefinisikan sebagai berikut :
𝑉𝑟 (%) =
|𝑉𝑅(𝑁𝐿) |
|𝑉𝑅(𝐹𝐿) |
𝑥 100 %
2.13
Dimana :
|𝑉𝑅(𝑁𝐿) |
: tegangan saklar ujung beban pada beban nol (No Load)
|𝑉𝑅(𝐹𝐿) |
: tegangan saklar ujung beban pada beban penuh (Full Load)
Untuk kawat pendek
|𝑉𝑅(𝑁𝐿) | = |𝑉𝑠 | = |𝑉𝑅(𝐹𝐿) | = |𝑉𝑅 |, maka
|𝑉𝑟 (%)| =
|𝑉𝑅 |−|𝑉𝑅 |
|𝑉𝑠 |
𝑥 100 %
2.4.2 Saluran Transmisi Menengah
2.14
Pada saluran transmisi menengah adalah saluran transmisi yang memiliki panjang lebih
dari 80 km sampai dengan 250 km, karena pertambahan panjang dari saluran transmisi pendek
maka persamaan yang telah dikembangkan pada saluran transmisi pendek tidak lagi
memberikan hasil perhitungan yang akurat. Untuk memperoleh hasil perhitungan yang akurat
maka pengaruh dari arus bocor yang melalui kapsitansi harus ikut diperhitungkan juga. Jaringan
transmisi menengah ini memilki 2 type yaitu tipe T dan tipe ∏. [4]
Berikut adalah gambar rangkaian ekivalen tipe T
Gambar 2.7 Rangkaian Ekivalen Saluran Transmisi Menengah
Dari gambar diatas diperoleh relasi tegangan dan arus sebagai berikut :
𝑧
𝑧
𝑉𝑠 = 𝑉𝑅 + 𝐼𝑅 2 + 𝐼𝑠 2
2.15
Akan tetapi
𝑧
𝑉𝑠 = 𝐼𝑅 + 𝑉𝑝 𝑌 = 𝐼𝑅 (𝑉𝑅 + 𝐼𝑅 2) Y
𝐼𝑠 = 𝑌𝑉𝑅 (1 +
𝑧𝑌
2
)𝐼𝑅
2.16
2.17
Sehingga
𝑉𝑠 = (1 +
𝑧𝑌
) 𝑉𝑅 + (𝑧 +
2
𝐼𝑠 = 𝑌𝑉𝑅 (1 +
𝑧𝑌
2
𝑧2
2
)𝐼𝑅
)𝐼𝑅
2.4.3 Saluran Transmisi Panjang
2.18
2.19
Saluran transmisi panjang adalah saluran transmisi yang memiliki panjang lebih dari 250
km. Jika dalam analisa perhitungan saluran transmisi pendek dengan menggunakan parameter
tertentu, berbeda lagi dengan saluran transmisi panjang untuk memperoleh nilai perhitungan
yang akurat memerlukan parameter – parameter saluran yang tidak tergumpal seperti
sebelumnya, akan tetapi terdistribusi secara merata ke seluruh panjang saluran. [4]
Berikut ini adalah gambar rangkaian ekuivalen saluran transmisi saluran panjang :
Gambar 2.8 Rangkaian Ekivalen Saluran Transmisi Panjang
Dalam penurunan perhitungannya memliki proses yang panjang, berikut persamaan akhir
untuk memperoleh nilai 𝑉𝑠 , 𝐼𝑠 , 𝑉𝑅 , 𝐼𝑅
𝑉𝑠 = 𝑉𝑅 cosh √𝑍𝑌 𝑙 + 𝑍𝑘 𝐼𝑅 sinh √𝑍𝑌 𝑙
𝐼𝑠 = 𝐼𝑅 cosh √𝑍𝑌 𝑙 +
𝑉𝑅
𝑍𝑘 sinh √𝑍𝑌𝑙
𝑉𝑅 = 𝑉𝑠 cosh √𝑍𝑌 𝑙 − 𝑍𝑘 𝐼𝑠 sinh √𝑍𝑌 𝑙
𝐼𝑅 = 𝐼𝑠 cosh √𝑍𝑌 𝑙 +
𝑉𝑠
𝑍𝑘 sinh √𝑍𝑌𝑙
2.20
2.21
2.22
2.23
2.5 Studi Tentang Aliran Daya
Perhitungan aliran daya merupakan suatu alat bantu yang sangat penting untuk
mengetahui kondisi operasi sistem. Perhitungan daya pada tegangan, arus, dan factor daya di
berbagai simpul suatu jaringan listrik dilakukan pada keadaan operasi normal. Hasil perhitungan
aliran daya ini kemudian digunakan untuk mensimulasi kondisi gangguan besar, stabilitas
transien maupun analisa kontigensi yaitu analisa keadaan dimana sebagian komponen sistem
tidak terhubung ke sistem dengan baik.
Studi aliran daya (Power Flow) disebut juga Load Flow adalah bagian penting dalam
analisis sistem tenaga. Penyelesaian masalah aliran daya, sistem diasumsikan dalam operasi
seimbang dan menggunakan model satu phasa. Jaringan terdiri dari beberapa node/bus dan
cabang yang mempunyai impedansi yang dinyatakan dalam per-unit (pu) pada base MVA. Ada
empat parameter yang digunakan pada setiap bus yaitu tegangan, sudut phasa, daya aktif, dan
daya reaktif. Perhitungan aliran daya pada dasarnya adalah menghitung besaran tegangan |𝑉|
dan sudut fasa tegangan δ pada setiap Gardu Induk (G.I) pada kondisi tunak dan ketiga fasa
seimbang. Hasil perhitungan ini digunakan untuk menghitung besar aliran daya aktif P dan
daya reaktif Q di setiap peralatan transmisi, besarnya daya aktif P dan daya reaktif Q yang
harus dibangkitkan setiap pusat pembangkit serta jumlah rugi – rugi di sistem.
Setiap G.I. dalam tenaga listrik dikelompokkan menjadi 3 (tiga) tipe G.I., yaitu :
1. G.I. bus beban : Variabel yang diketahui adalah daya aktif P, daya rekatif Q. Kemudian
akan dihitung besaran tegangan |𝑉| dan sudut fasa tegangan δ di setiap G.I.
2. G.I. bus pembagkit : Variabel yang diketahui daya aktif P dan besaran tegangan |𝑉|,
sedangkan daya reaktif Q dan sudut fasa tegangan δ merupakan hasil perhitungan.
3. G.I. bus penyanggah (G.I. swing) : Variabel yang diketahui adalah besaran tegangan |𝑉|
dan sudut fasa tegangan δ yang merupakan sudut referensi. Sedangkan daya aktif P dan
daya reaktif Q yang harus dikompensasi merupakan hasil perhitungan.
2.5.1 Persamaan Aliran Daya
Sistem tenaga listrik tidak hanya terdiri dari dua bus, melainkan terdiri dari beberapa bus
yang akan diinterkoneksi satu sama lain. Daya listrik yang diinjeksikan oleh generator kepada
salah satu bus, bukan hanya diserap oleh beban bus tersebut, melainkan dapat juga diserap oleh
beban di bus yang lain. Kelebihan daya pada bus akan dikirimkan melalui saluran transmisi ke
bus – bus lain yang kekurangan daya. Diagram satu garis G.I. tipe bus dari suatu sistem tenaga
listrik terdapat pada gambar 2.9.
Gambar 2.9 Diagram sat ugaris GI tipe bus dari sistem tenaga
Arus pada G.I. i adalah :
𝐼𝑖 = 𝑉𝑖 ∑𝑛𝑗=0 𝑦𝑖𝑗 − ∑𝑛𝑗=𝑖 𝑦𝑖𝑗 𝑉𝑗 dimana 𝑗 ≠ 𝑖
2.24
Persamaan daya pada GI i adalah :
𝑃𝑖 + 𝑗𝑄𝑖 = 𝑉𝑖 𝐼𝑖 ∗
2.25
atau
𝐼𝑖 =
𝑃𝑖 −𝑗𝑄𝑖
𝑉𝑖 ∗
2.26
Dengan mensubstitusi persamaan (2.26) ke persamaan (2.21) diperoleh :
𝑃𝑖 −𝑗𝑄𝑖
𝑉𝑖 ∗
= 𝑉𝑖 ∑𝑛𝑗=0 𝑦𝑖𝑗 − ∑𝑛𝑗=𝑖 𝑦𝑖𝑗 𝑉𝑗 dimana 𝑗 ≠ 𝑖
2.27
Dari persamaan diatas tampak bahwa persamaan aliran daya bersifat tidak linier dan harus
diselesaikan dengan metode numerik iterative sehingga lewat iterasi – iterasi didapatkan hasil
yang dibutuhkan.
2.6 Tegangan Sistem
Sistem tenaga listrik terdiri dari banyak G.I dan Pusat Pembangkit Listrik. Dalam setiap
G.I maupun pusat pembangkit listrik terdapat bus. Tegangan dari bus di G.I dan tegangan di bus
pusat pembangkit listrik membentuk profil tegangan sistem. Tegangan pada setiap bagian siste
tenaga listrik tidak sama, sehingga pengaturan tegangannya lebih sulit. Tegangan pada suatu
sistem tenaga listrik dipengaruhi oleh :
1. Arus penguat generator
2. Daya reaktif beban
3. Daya aktif yang didapat dalam sistem (selain generator), misalnya dari kondensator dan
dari reactor
4. Posisi tap transformator
2.6.1 Pengaturan Tegangan
Meskipun kelangsungan catu daya dapat diandalkan, dana yang dibutuhkan tersedia dan
pekerjaan dilakukan secara ekonomis, tetap tidak mungkin untuk mempertahankan tegangan
tetap pada sistem distribusi, karena tegangan jatuh akan terjadi di semua bagian sistem dan akan
berubah dengan adanya perubahan beban. Ukuran penghantar, karakteristik transformator dan
kebiasaan konsumen adalah hal yang harus diperhitungkan. Secara singkat kualitas tegangan
tergantung pada dua hal :
1. Kelangsungan pelayanan
2. Pengaturan tegangan sistem
Perubahan tegangan pada sistem tenaga listrik seperti penurunan tegangan daris hasil
studi dan simulasi pada pembangkit dan beban, memberikan dampak adanya perubahan arus
sistem, rugi – rugi sistem dan faktor daya. Untuk itu diperlukan pengatur tegangan. Untuk
melakukan pengaturan tegangan pada sistem tenaga listrik, ditentukan oleh dua faktor, aitu :
1. Besarnya daya reaktif yang harus disediakan
2. Tempat atau bus penyediaan daya reaktif harus tepat
Mengatur tegangan pada suatu bus dalam sistem tenaga listrik akan lebih mudah apabila
di bus tersebut ada sumber daya reaktif yang bias diatur. Dalam sistem tenaga listrik ada dua
variabel yang dapat diatur secara bebas, yaitu daya nyata (MW) dan daya reaktif (MVAR) yang
merupakan variabel pengatur (control variable). Pengaturan tegangan dapat dilakukan dengan :
1. Penyetelan arus penguat generator
2. Pemasangan kompensator shunt. Kompensator shunt ini akan menyerap daya reaktif
yang berlebihan untuk mengurangi tingkat tegangan bus apabila beban rendah (sebagai
inductor), dan mengalirkan daya reaktif (MVAR) untuk menaikkan tegangan pada
kondisi beban yang tinggi (sebagai kapasitor).
3. Penyetelan tingkat tegangan sub-transmisi pada titik – titik pencatuan.
4. Gunakan transformator dengan pemindahan “tap” otomatis untuk jaring – jarring substation.
5. Tambahkan saluran pencatu atau distribusi tambahan
6. Besarkan ukuran penghantar dari saluran pencatu yang ada
7. Atur kembali sistem yang ada, pindah – pindahkan beban
8. Beban – beban antar fasa dibuat seimbang
9. Ubah sistem satu fasa menjadi tiga fasa
10. Bila memungkinkan buat loop tertutup
11. Tambah kapasitas transformator distribusi
12. Ubah peletakan tap pada transformator distribusi
13. Tambah kompensasi tegangan jatuh saluran, yaitu kapasitor – kapasitor seri.
14. Pasang pengatur tegangan
15. Tingkatkan tegangan distribusi
16. Pasang kapasitor parallel, dengan switch atau tanpa switch
17. Pasang kapasitor seri
Dilain pihak, beban dalam sistem mengambil daya aktif dan daya reaktif dari sistem.
Beban tidak bisa diatur karena tergantung kepada kebutuhan banyak pelanggan yang
mempergunakan tenaga listrik dari sistem. Secara pengetahuan kontrol, beban merupakan
variabel pengganggu (distrurbance variable). Ada tiga syarat utama untuk pengaturan tegangan
secara umum :
1. Tegangan tidak boleh naik – turun sangat besar atau berkedip
2. Tegangan harus mendekati tingkat optimum tertentu
3. Penyebaran tegangan tidak boleh lebih atau kurang dari batas yang sudah ditentukan.
2.7 Stabilitas Sistem Tenaga
Kestabilan sistem merupakan bagian yang perlu untuk dijaga dalam operasi sistem
tenaga. Stabilitas sistem tenaga didefinikan sebagai kemampuan sistem tenaga yang
memungkinkan sistem tersebut untuk tetap berada pada kondisi dalam batas operasi yang
diinginkan pada keadaan normal atau abnormal di sistem tenaga. Sistem tenaga merupakan
sistem yang sangat kompleks dan terdiri dari banyak peralatan listrik yang memiliki
karakteristik serta tanggapan masing – masing terhadap perubahan kondisi. Oleh karena itu,
perlu pengklasifikasian kestabilan sistem tenaga berdasarkan faktor kontribusi yang
menyebabkan ketidakstabilan. Klasifikasi tersebut diperlihatkan pada Gambar 2.10
Gambar 2.10. Klasifikasi Stabilitas Sistem Tenaga
Tujuan dari studi kestabilan pada sistem tenaga adalah untuk menentukan rotor mesin
yang terganggu dapat kembali ke keadaan normal dengan kecepatan konstan. Kondisi ini berarti
kecepatan rotor harus menyimpang dari kecepatan sinkron, paling tidak untuk beberapa waktu.
Penyeimbangan kecepatan rotor yang terlalu lama juga dapat membuat mesin menjadi rusak.
Dalam studi stabilitas dibuat asumsi, yaitu :
1. Dalam analisis stabilitas sistem tenaga, hanya diperhitungkan arus dan tegangan
frekuensi serempak. Oleh karena itu, semua komponen harmonis akan diabaikan.
2. Komponen simetris digunakan untuk representasi gangguan tidak seimbang.
3. Tegangan yang dibangkitkan dianggap tidak dipengaruhi oleh perubahan kecepatan
mesin.
2.8 Stabilitas Tegangan Pada Sistem Tenaga Listrik
Salah satu faktor pada kestabilan sistem tenaga adalah stabilitas tegangan. Stabilitas
tegangan ialah kemampuan sistem tenaga untuk menjaga nilai tegangan pada batas operasi yng
ditentukan di semua bus pada sistem tenaga, saat sistem berada pada kondisi normal dan tidak
normal akibat terjadi gangguan. Sistem mengalami kondisi tidak stabil ketika terjadi gangguan,
perubahan beban, dan perubahan kondisi pada sistem. Kriteria yang menyatakan sistem tenaga
memiliki kestabilan tegangan adalah pada kondisi operasi tertentu dalam sistem, tegangan di
bus tertentu akan mengalami kenaikan tegangan ketika disuntikan daya reaktif pada bus yang
sama.
Sedangkan, tegangan sistem tidak stabil jika paling tidak salah satu bus di sistem tenaga
mengalami penurunan tegangan saat disuntukkan daya reaktif pada bus yang sama. Dengan
demikian, maka sistem tenaga listrik memiliki hubungan yang sebanding antara daya reaktif (Q)
dengan tegangan (V) bus saat sistem memiliki kestabilan tegangan.
Gambar 2.11 menggambarkan sistem tenaga yang sederhana yang terdiri dari dua
terminal (bus). Sistem tersebut terdiri dari tegangan sumber (𝐸𝑠 ), impedansi (𝑍𝐿𝑁 ), dan
impedansi beban (𝑍𝐿𝐷 ). Ini mempresentasikan sistem radial di sistem tenaga yang menyalurkan
daya dari pembangkit ke sisi beban melalui suatu penghantar.
Gambar 2.21 Representasi Sistem Tenaga Listrik Radial
Arus (I) yang mengalir dalam sistem dirumuskan dengan persamaan
𝐼̃ =
𝐸̃𝑠
̃
𝑍
𝑍𝐿𝐷
𝐿𝑁 +̃
2.28
Dengan menyatakan bahwa
̃
𝑍̃
𝐿𝑁 = 𝑍𝐿𝑁 ∠ 𝜃 dan 𝑍𝐿𝐷 = 𝑍𝐿𝐷 ∠𝜙
Maka magnitude arus dinyatakan dengan
𝐼=
𝐸𝑠
√(𝑍𝐿𝑁 cos 𝜃 + 𝑍𝐿𝐷 cos 𝜙)2 +√(𝑍𝐿𝑁 sin 𝜃 + 𝑍𝐿𝐷 sin 𝜙)2
2.29
atau
𝐼=
𝐸𝑠
𝐸𝑠
2.30
√𝐹 𝑍𝐿𝑁
Dimana
2
𝑍
𝑍
𝐹 = 1 + (𝑍𝐿𝐷 ) + 2 (𝑍𝐿𝐷 ) cos(𝜃 − ∅)
𝐿𝑁
𝐿𝑁
Magnitudo tegangan di sisi penerima adalah
𝑉𝑅 = 𝑍𝐿𝐷 𝐼
=
1
𝑧𝐿𝐷
√𝐹 𝑍𝐿𝑁
𝐸𝑠
2.31
Daya yang disuplai ke beban adalah
𝑃𝑅 = 𝑉𝑅 𝐼 cos ∅
=
𝑍𝐿𝐷
𝐹
𝐸
2
(𝑍 𝑠 ) cos ∅
𝐿𝑁
2.9 Penyebab Ketidakstabilan Tegangan di Sistem Tenaga Listrik
2.32
Sistem tenaga merupakan sistem yang dinamis, dimana selalu terjadi perubahan di dalam
sistem tersebut dalam selang waktu tertentu. Peristiwa gangguan – gangguan, seperti gangguan
satu fasa ke tanah, dua fasa ke tanah, tiga fasa, antar fasa, pelepasan beban, dan putus saluran
dapat mempengaruhi kestabilan sistem. Kondisi ini dapat menimbulkan osilasi pada sistem
sehingga mempengaruhi kestabilan tegangan sistem. Dalam studi kestabilan tegangan, akibat
terjadinya gangguan kemampuan sistem untuk kembali stabil terbagi dua, yaitu stabilitas jangka
pendek dan stabilitas jangka panjang. Stabilitas jangka pendek biasanya terjadi akibat adanya
tanggapan cepat pengendali tegangan seperti Automatic Voltage Regulator (AVR) atau Flexible
AC Transmission Sistem (FACTS). Sedangkan, stabilitas waktu panjang melibatkan peralatan
yang memiliki tanggapan lambat terhadap perubahan sistem, seperti On-load Tap Charger
(OLTP) atau Delayed Corrective Control Action.
Komponen dan kendali sistem tenaga tenaga memperangaruhi kestabilan tegangan
berdasarkan lamanya waktu memperoleh kesabilan kembali diperlihatkan pada Gambar 2.
Stabilitas Tegangan
Tegangan
Panjang
Waktu Pendek
Stabilitas
Waktu
Gambar 2. 22 Komponen Sistem Kendali yang Mempengaruhi Stabilitas Tegangan
2.10 Metode Pada Analisis Kestabilan
Menurut (Kundur, 2004), untuk mengetahui kondisi kesetabilan suatu sistem tenaga
maka dibutuhkan dua analisis yang dalam prosesnya digolongkan menjadi dua macam
berdasarkan sifat dari sistem tenaga listrik tersebut antara lain :
a. Analisis Statis
Analisis statis merupakan analisis yang didapatkan dari solusi himpunan persamaan
aljabar ketika sistem berada pada keadaan steady state, yang bertujuan mengevaluasi kelayakan
titik kesimbangan yang diwakili oleh kondisi operasi sistem dan untuk menemukan nilai
tegangan kritis pada analisis kesetabilan tegangan. Hasil dari analisis statis ini memberikan
informasi berbagai macam mengenai masalah dan membantu mengidentifkasi faktor utama
pada masalah ketidakstablilan yang terjadi pada sistem. Pemetaan kurva hubungan antara
tegangan dengan daya beban atau kurva P-V membantu mengalisis batasan stabilitas tegangan
dari sistem tenaga dengan skenario kenaikkan beban yang terus menerus hingga mencapai titik
runtuh tegangannya atau dengan diberi gangguan seperti hilangnya pembangkit atau
peningkatan rugi daya pada saluran transmisi.
b. Analisis Dinamis
Analisis Dinamis meruapakan analisis yang didapatkan dari solusi numerik dari
himpunan persamaan diferensial dan aljabar yang memodelkan sistem tenaga pada kondisi
transien. Pada jenis simulasi ini membutuhkan cukup banyak proses komputasi oleh karena itu
memerlukan waktu yang lama serta sulit memberikan informasi yang jelas tentang kepekaan
dan tingkat stabilitas suatu sistem tenaga.
2.11 Metode Lyapunov
Pada studi kestabilan sistem, perubahan kondisi ini dapat mengakibatkan sistem
mengalami ketidakstabilanataupun sistem mempertahankan kestabilan. Sistem kendali dalam
suatu peralatan bertujuan untuk mempertahankan kestabilan sistem di saat terjadi perubahan
kondisi. Hal ini sangat penting karena sistem kendali yang tidak stabil dapatmengakibatkan
peralatan menjadi rusak.
Pada tahun 1892, A.M Lyapunov mengusulkan bahwa stabilitas titik kesetimbangan non
linier sistem dari dimensi n dari :
𝑥̇ = 𝑓 (𝑥), 𝑓 (0) = 0
2.33
dapat dipastikan tanpa integrasi numerik. Theorema Lyapunov menyatakan jika ada fungsi 𝑉(𝑥)
untuk persamaan 2.33 yang pasti positif di sekitar titik kesetimbangan “0” dan turunannya
𝑉̇(𝑥) < 0, lalu kesetimbangannya stabil asimptotik. 𝑉̇(𝑥) dapat diperoleh pada persamaan 2.34.
𝑉̇(𝑥) = ∇𝑉 𝑇 . 𝑓 (𝑥)
2.34
𝑉(𝑥) adalah generalisasi dari konsep energi pada suatu sistem. Meskipun banyak fungsi
Lyapunov yang berbeda telah dicoba sejak saat itu, namun integral pertama gerak, yang
merupakan jumlah energi kinetik dan potensial, mungkin telah disediakan hasil terbaik Dalam
literatur kekuatan, metode Lyapunov telah menjadi apa yang disebut Transient Metode Fungsi
Energi (TEF).
2.12 Kurva Karakteristik P-V dan Q-V
Analisis stabilitas tegangan dengan menggunakan kurva P-V atau nose curve ini adalah
untuk melihat pada kondisi beban total berapa (MW) tegangan sistem mengalami
runtuh/collpse. Artinya kemampuan sistem dalam menyalurkan daya aktif telah melebihi
kemampuan sistem itu sendiri.
Kurva P-V berguna untuk analisis stablitas tegangan dan untuk sistem-sitem radial.
Metode ini juga di gunakan untuk jaringan yang luas dimana P adalah total beban dan V adalah
tegangan kritis atau reprenstasi bus. P ( daya ) dapat juga merupakan daya yang ditransfer
sepanjang transmisi atau interkoneksi. Bentuk kurva PV merupakan reprensentasi dari bus
beban, sedangkan pada bus swing dan bus generator tidak berlaku karena pada bus tersebut
terdapat generaor sehingga nilai tegangannya tetap untuk perubahan beban tertentu.
Kurva PV atau nose curve mereprentasikan variasi tegangan yang berkaitan dengan
variasi beban daya aktif. Kurva PV ini diperoleh dari serangkaian solusi aliran daya untuk
tingkat beban berbeda yang terdistribusi secara merata dengan menjaga faktor daya tetap. Daya
aktif yang dibangkitkan sebanding dengan rating generator atau berdasarkan faktor permintaan
beban dari konsumen. Komponen P dan Q dari setiap beban tegantung dari tegangan bus sesuai
dengan model yang pilih. Penentuan titik kritis untuk peningkatan beban yang diberikan sengat
penting karena dapat menyebabkan runtuhnya tegangan sistem.
Untuk memperkirakan bentuk kurva PV maka bisa digunakan model sistem pada gambar
2.35 Dengan mengasumsikan sistem memiliki tegangan sumber konstan dengan magnitude
tegangan E dan impedansi transmisi reaktif murni jX. Menggunakan persamaan aliran daya
𝑃=−
𝑃=−
𝐸𝑉
𝑥
𝑉2
𝑥
sin 𝜃
+
𝐸𝑉
𝑥
2.35
cos 𝜃
2.36
Gambar 2.23 Sistem Pengujian Bus
Dimana P adalah daya aktif yang dikonsumsi beban, Q adalah daya reaktif yang
dikonsumsi beban, V adalah tegangan bus beban, dan 𝜃 adalah perbedaan sudut tegangan antara
bus beban dan bus generator. Dari kedua persamaan tersebut nilai V dapat diketahui dengan
persamaan berikut :
𝐸2
𝐸4
𝑉 = √ 2 − 𝑄𝑋 ± √ 4 − 𝑋 2 𝑃2 − 𝑋𝐸 2 𝑄
2.37
Solusi dari tegangan beban ditampilkan dalam kurva PV, yang juga dikenal sebagai
norse curve seperti disebutkan diatas. Gambar 2.23 adalah kurva PV yang berbeda – beda
dengan asumsi faktor daya tetap konstan 𝑃 = 𝑄 tan ∅
Gambar 2.24 Kurva P-V
Persamaan diatas akan menghasilkan dua buah titik tegangan pada kondisi aliran daya
yang terus berubah. Titik tegangan yang berada di wilayah atas menandakan sistem stabil dan
titik tegangan yang berada di wilayah menandakan sistem tidak stabil. Titik kritis (pada ujung
kurva) memperlihatkan titik pembebanan maksimum atau titik kritis pembebanan. Penyediaan
daya beban yang mendekati batas kestabilan masih diperbolehkan asalkan tidak mencapai titik
kritisnya.
Gambar 2.25 Kurva PV Batas Daya
Kurva P-V berguna untuk menganalisis stabilitas tegangan dan untuk studi sistem radial.
Metode ini juga digunakan untuk jaringan yang luas dimana P adalah total beban dan V adalah
tegangan kritis representasi bus. Daya aktif (P) juga merupakan daya aktif yang mampu di
transfer oleh suatu saluran transmisi. Bentuk kurva P-V merupakan penggambaran dari bus
beban setiap bus. Sedangkan pada bus swing, generator kurva P-V digambarkan sebagai garis
lurus karena pada bus tersebut tidak ada beban sehingga perubahan beban sebesar apapun bus
swing generator tidak akan berubah tegangannya atau tegangan tetap.
Kurva P-V merupakan indeks stabilitas tegangan yang didasarkan pada beberapa jenis
analisis aliran daya dengan tujuan untuk mengevaluasi batas stabilitas tegangan. Baik metode
Jacobian, Fast Decoupled ataupun Newton Raphson digunakan dalam aliran daya namun
penyelesaiannya menjadi singular pada titik kritis, selain solusi aliran daya pada titik – titik
dekat daerah kritis cenderung divergen. Masalah ini dihindari dengan menggunakan metode
aliran daya berkelanjutan atau biasa disebut Continuation Power Flow (CPF).
2.13 Flexible AC Transmission System (FACTS)
Teknologi Flexible AC Transmisission System Controller (FACTS Controller)
merupakan peralatan control aliran daya serbaguna dan flexible pada jaringan transmisi, yang
dalam perkembangannya telah mengalami dua generasi (N..Hingorani, 1993).
Generasi pertama menghasilkan dua jenis peralatan, yaitu Static Var Compensator
(SVC) dan Narani G. Hingorani-subSynchronous Resonance (NGH-SSR) Damper. SVC sudah
diimplementasikan pada jaringan transmisi sejak tahun 1970 an, yang terdiri dari thyristor,
inductor dan capasitor. Dalam hal ini thyristor berfungsi sebagai saklar yang menghubungkan
dan memutuskan inductor maupun capasitor pada jaringan transmisi, agar diperoleh kestabilan
tegangan pada keadaan steady state. Namun kekurangannya, SVC tidak dapat dipergunakan
sebagai peralatan control aliran daya aktif, olehkarena efisiensinya sangat rendah saat terjadi
penurunan tegangan secara drastis pada jaringan transmisi.
NGH-SSR dirancang untuk mengatasi masalah Sub Synchronous Resonance yang
ditemukan pada jaringan transmisi, terdiri dari thyristor, inductor dan tahanan yang terhubung
secara seri, NGH-SSR inilah kemudian menjadi cikal bakal dari salah satu peralatan yang
dikembangkan pada generasi kedua FACTS Controller, yang dikenal dengan nama Thyristor
Controlled Series Capacitor (TCSC).
Generasi kedua, menghasilkan beberapa peralatan FACTS yang baru, yaitu; Thyristor
Controlled Series Capacitor (TCSC) berfungsi sebagai pengendali impedansi pada jaringan
transmisi, Static synchronous Compensator (STATCOM) berfungsi sebagai penyedia daya
reaktif untuk menjaga kestabilan tegangan pada jaringan transmisi, Thyristor Controlled Phase
angle Regulator (TCPR) berfungsi sebagai pengendali sudut fasa tegangan pada kedua ujung
jaringan transmisi, Unifield Power Flow Controller (UPFC) berfungsi sebagai pengendali daya
aktif dan reaktif secara simultan, Thyristor controlled braking resistor (TCBR) berfungsi
mencegah terjadinya percepatan pada generator setelah terjadinya pemutusan beban pada line
transmisi, Thyristor Controlled Series Reactor (TCSR) digunakan pada jaringan transmisi yang
membutuhkan pengurangan beban dengan cepat dan pembatasan arus gangguan, Thyristor
Controlled Voltage Limiter (TCVL) berfungsi sebagai pembatas kelebihan tegangan selama
selang waktu yang relative lama, yang dapat merusak peralatan pada jaringan transmisi
(R.Nelson, 1994).
Menurut N.G. Hingorani and L. Gyugyi (1999), FACTS controller secara umum dapat
dibagi kedalam 4 kategori, yaitu:
a. Series Controller
Series Controller bisa berupa impedansi variable, misalnya: capasitor, reactor dan
semacamnya, atau sumber variable berbasis elektronika daya yang terhubung seri dengan line.
Perkalian Impedansi variable dengan arus yang mengalir padanya, maka series controller
merepresentasikan sebuah tegangan seri yang diinjeksikan pada line, dan Selama tegangan seri
berbeda fasa 900 terhadap arus line, maka series controller hanya mensupply atau
mengkomsumsi daya reaktif variable, sedangkan untuk beda fasa yang lain maka series
controller juga menghandle daya real
b. Shunt Controller
Sebagaimana pada series controller, maka shunt controller juga bisa berupa impedansi
variable, sumber variable atau kombinasi dari keduanya. Impedansi shunt variabel yang
terhubung dengan tegangan line, menyebabkan mengalirnya arus variable. Untuk itu shunt
controller merepresentasikan injeksi arus ke dalam line. Selama arus yang dinjeksikan berbeda
fasa 900 terhadap tegangan line, maka shunt controller hanya mensupply daya reaktif variable,
sedangkan untuk beda fasa yang lain, maka shunt controller juga menghandle daya real
c. Combined Series - Series Controller
Combined series-series controller dapat berupa kombinasi dari series controller secara
terpisah, yang dikontrol dengan cara koordinasi pada system transmisi multi line. Atau dapat
juga berupa Unified controller, dimana series controller melakukan kompensasi reaktif seri
untuk setiap line sambil mentransfer daya real diantara line melalui power link. Kemampuan
transfer daya real pada unified series-series controller, berkenaan dengan Interline power flow
controller, memungkinkan aliran daya real dan reactive dalam line berada dalam keseimbangan,
dan sudah barang tentu penggunaan system transmisi menjadi maksimal.
d. Combined Series - Shunt Controller
Combined Series-shunt Controller berupa kombinasi shunt dan series controller secara
terpisah yang dikontrol dengan cara koordinasi, atau berupa UPFC dengan elemen seri dan
shunt. Pada perinsipnya kombinasi shunt-series controller menginjeksi arus dalam system
dengan elemen shunt dari controller dan tegangan seri pada line dengan elemen seri dari
controller. Namun demikian, ketika shunt dan series controller menyatu, maka daya real dapat
saling dipertukarkan antara series dan shunt controller melalui dc power link.
Controller yang terhubung seri, akan mempengaruhi bentuk tegangan, aliran arus dan
daya secara langsung. Oleh karena itu jika dimaksudkan untuk mengontrol aliran arus/daya dan
meredam osilasi, maka series controller jauh lebih baik dari pada shunt controller. Namun
demikan shunt controller pada sisi yang lain, merupakan sumber arus yang menginjeksi arus ke
dalam system, sehingga sangat baik sebagai control tegangan pada dan sekitar titik sambungan
melalui injeksi arus reaktif (leading atau lagging). Untuk itu shunt controller lebih efektif untuk
control tegangan dan meredam osilasi, baik itu sebagai injector arus reaktif saja atau kombinasi
arus reaktif dan aktif. Untuk lebih jelasnya, penegelompokan FACTS Devices dapat dilihat pada
gambar 2.10.
Gambar 2.26. Blok diagram pembagian FACTS Dvices
2.14 Unified Power Flow Controller (UPFC)
a. Rangkaian Dasar dan Perinsip Operasi
Menurut Louie,K.W at. All (2007), UPFC adalah controller serba guna yang berfungsi
melakukan perbaikan pada performance sistem tenaga listrik.
Menurut Sadikovic, Rusejla (2003), UPFC dapat mengontrol semua parameter dasar
sistem tenaga secara simultan (tegangan transmisi, impedansi dan sudut fasa ) dan compensasi
dinamis pada sistem AC, baik itu sebagai kompensasi reaktif shunt, kompensasi reaktif seri,
dan pengubah phasa, sehingga memenuhi fungsi control ganda atau serba guna.
Menurut Gyugyi (1991), struktur dasar dari UPFC, terdiri dari 2 buah Voltage Sourced
Converters (VSC), yang saling terhubung dengan Common DC Link melalui DC Storage
Capacitor. setiap konverter terhubung ke sistem melalui coupling transformer. Converter 1
terhubung paralel dengan line transmisi melalui shunt transformer (Boosting Transformer) dan
dikenal sebagai STATCOM, sedangkan konverter 2 terhubung seri dengan line transmisi melalui
series transformer (Exciting Transformer) dan dikenal sebagai SSSC. Lebih jelasnya dapat
dilihat pada gambar 2.27a dan gambar 2.27b (Noroozian, M., Angquist, L., Ghandhari, M.,
Anderson, G,1997).
Gambar 2.27a. Rangkaian Dasar dari UPFC
Gambar 2.27b. Blok diagram dari UPFC
Dari gambar 2.27a dan 2.27b. bahwa kedua konverter dioperasikan dari common DC
Link melalui DC storage capacitor, dimana konverter seri berfungsi menginjeksi tegangan Vpq
dengan besaran dan sudut fasa yang controllable, terhubung seri dengan line, sedangkan
konverter shunt yang menyuplai arus reaktif melalui transformer shunt berfungsi menyuplai
daya aktif yang dibutuhkan oleh konverter seri melalui common DC link. Keadaan ini yang
menyebabkan konverter seri dapat melakukan pertukaran daya aktif dan reaktif dengan line
transmisi.
Setiap konverter dapat membangkitkan atau menyerap daya reaktif pada masingmasing terminal AC nya. Konverter shunt selain harus mampu mempertahankan tegangan DC
yang konstan dengan mengontrol phasa tegangan melalui petukaran daya aktif, ia juga
mengontrol besar tegangan terminal ac pada transformer shunt melalui pertukaran daya reaktif
dengan line. Sedangkan converter seri melalui tegangan injeksinya dapat melakukan
pengontrolan daya aktif dan reaktif dengan line transmisi.
Sebagai contoh, Untuk memodifikasi aliran daya aktif pada jaringan transmisi, maka
tegangan seri disisipkan sedemikian rupa sehingga menyebabkan terjadinya pergeseran fasa
tegangan, dan untuk memodifikasi aliran daya reaktif pada jaringan transmisi, maka tegangan
seri disisipkan sedemikian rupa sehingga menyebabkan terjadinya perubahan pada besar
tegangan. Keadaan ini dapat terjadi jika padanya diberlakukan 2 buah konstrain. Konstrain
pertama adalah menetapkan besaran maksimum dari tegangan seri dan konstrain kedua
menetapkan besar tegangan maksimum dan minimum pada sisi penerima.
b. Jenis Pemodelan UPFC
Dalam menganalisis tanggapan sistem yang terpasang UPFC pada kesetabilan dapat
dilakukan dengan cara pemodelan UPFC. Dalam perkembangannya, ada beberapa jenis
pemodelan yang digunakan dalam analisis performa UPFC ini. Pembagian jenis pemodelan
berdasarkan pada tujuan studi, baik analisis secara fisik, analisis steady state, ataupun analisis
stablitas sistem. Penggolongan jenis pemodelan UPFC adalah sebagai berikut :
1. Model Elektromagnetik, merupakan pemodelan UPFC untuk mendapatkan investigasi
secara detail mengenai performa UPFC secara fisik
2. Model Steady state, merupakan pemodelan UPFC untuk evaluasi operasi steady state
sistem. Pada pemodelan ini, analisis dibatasi pada suatu kondisi operasi, yaitu saat sistem
mencapai kondisi steady state.
3. Model Dinamis, merupakan pemodelan UPFC yang digunakan untuk analisis stabilas
sistem. Kondisi yang diamati adalah kondisi yang berhubungan dengan stabilitas sistem.
c. Cara Kerja UPFC
Secara konsep, prinsip kerja dari UPFC dapat digambarkan sebagai Synchronous
Voltage Source (SVS) yang merepresentasikan keadaan fundamental dari fasor tegangan 𝑉𝑝𝑞
yang besar tegangannya dapat diatur (0 ≤ 𝑉𝑝𝑞 ≥ 𝑉𝑝𝑞𝑚𝑎𝑥 ) dan sudut 𝜌 (0 ≤ 𝜌 ≥ 2𝜋) searah
dengan saluran transmisi seperti digambarkan sebagai dua generator atau sistem dengan dua
mesin yang dihubungkan dengan saluran transmisi diantara keduanya seperti digambarkan pada
gambar dibawah ini :
Gambar 2.28 Prinsip Kerja UPFC
Dari gambar diatas akan didapatkan persamaan yang menjadi dasar atau prinsip kerja dari
UPFC, yaitu :
𝑃=
𝑄=
𝑉2 × 𝑉3 ×sin 𝛿
𝑋
𝑉2 (𝑉2 − 𝑉3 cos 𝛿)
𝑋
2.38
2.39
Gambar diatas diambil dari buku Understanding FACTS karya N.G Hingorani dan
L.Gyugi (2000). SVS pada UPFC saling menukar daya aktif dan daya reaktif ke sistem
sedangkan daya aktif harus diserap dari generator pada sisi pengirim yang kemudian
menyalurkannya pada saluran transmisi. SVS hanya mampu menginjeksikan daya reaktif ke
sistem sedangkan daya aktif harus diserap dari sistem tersebut. Seperti pada gambar 2.28 SVS
menyerap daya aktif dari generator pasda sisi pengirim yang kemudian menyalurkannya pada
saluran transmisi (Hingorani et. Al. 2000)
d. Pemodelan UPFC
Dari uraian cara kerja diatas maka UPFC dapat direprentasikan sebagai dua konverter
tegangan yang dihubungkan oleh jaringan DC berkapasitor yang mana kedua konverter ini
dihubungkan dengan transformator secara seri dan paralel pada sebuah saluran transmisi
diantara dua bus seperti pada gambar diilustrasikan oleh Milano (2010) dibawah ini :
Gambar 2.29 Model Rangkaian UPFC
Menurut Nabavi, (1996), UPFC dapat dimodelkan dalam suatu pemodelan aliran daya
suatu sistem tenaga sebagai bus PQ pada sisi konverter paralelnya dan bus PV pada sisi
konverter yang terhuung seri dengan saluran transmisi seperti pada gambar di bawah ini :
Gambar 2.30 UPFC Sebagai PQ dan PV
Pada gambar diatas yang diambil dari penelitian Nabavi (1996), sisi konverter yang
terhubung paralel pada bus E dapat diubah menjadi suatu bus PQ sedangkan sisi konverter yang
terhubung seri dengan bus B diubah menjadi suatu bus PV. Hal tersebut dapat dilakukan karena
UPFC difungsikan untuk menjaga aliran daya dari bus E ke bus B pada nilai tertentu.
Pemodelan UPFC juga dapat dilakukan dengan pemodelan dibawah ini. Pemodelan
UPFC dibawah dilakukan dengan menghubungkan persamaan matematis tiap komponennya
sesuai dengan uraian cara kerja UPFC seperti dibawah ini :
Gambar 2.31 Pemodelan Matematis Pada UPFC
Dari model rangkaian diatas dapat dirumuskan persamaan daya aktif dan daya reaktif
UPFC sebagai berikut :
∗
̅̅̅̅̅̅
𝑃𝑘 = 𝑃𝑠ℎ + ∑{𝑉
𝑘 𝐼𝑚 }
2.40
∗
̅̅̅̅̅̅
𝑄 = 𝑄𝑠ℎ + ∑{𝑉
𝑘 𝐼𝑚 }
2.41
∗
̅̅̅̅̅̅
𝑃𝑚 = − ∑{𝑉
𝑘 𝐼𝑚 }
2.42
∗
̅̅̅̅̅̅
𝑄𝑘 = − ∑{𝑉
𝑘 𝐼𝑚 }
2.43
Daya yang diserap pada kompensasi parallel adalah :
𝑃𝑠ℎ = 𝑉𝑘2 𝐺𝑠ℎ − 𝐾𝑠ℎ 𝑉𝑑𝑐 𝑉𝑘 𝐺𝑠ℎ cos(𝜃𝑘 − 𝛼) − 𝐾𝑠ℎ 𝑉𝑑𝑐 𝑉𝑘 𝐵𝑠ℎ sin(𝜃𝑘 − 𝛼)
2.44
𝑄𝑠ℎ = 𝑉𝑘2 𝐵𝑠ℎ − 𝐾𝑠ℎ 𝑉𝑑𝑐 𝑉𝑘 𝐵𝑠ℎ cos(𝜃𝑘 − 𝛼) − 𝐾𝑠ℎ 𝑉𝑑𝑐 𝑉𝑘 𝐺𝑠ℎ sin(𝜃𝑘 − 𝛼)
2.45
Sedangkan rangkaian DC memiliki persamaan sebagai berikut :
𝑉𝑑𝑐 =
𝑃𝑠ℎ
𝐶𝑉𝑠ℎ
+
∗
̅̅̅̅̅̅
∑{𝑉𝐼
𝑚}
𝐶𝑉𝑑𝑐
=
𝑉𝑑𝑐
𝑅𝑐
−
𝐶
2
2
)
𝑅𝑠ℎ (𝑃𝑠ℎ
+ 𝑄𝑠ℎ
𝐶𝑉𝑑𝑐 𝑉𝑘2
−
2
𝑅𝑠𝑒 𝐼𝑚
𝐶𝑉𝑑𝑐
2.46
Dengan
3
𝐾𝑠ℎ = √8𝑚
𝑠ℎ
2.47
Maka arus Im dan tegangan V karena kompensasi seri adalah :
𝐼𝑚 =
̅̅̅̅̅ 𝑎2 ̅̅̅
̅̅̅̅
(1− 𝛼) (𝑉
𝑚 − 𝑉𝑛 )− ̅̅̅̅𝑉
1
𝑅𝑇 +𝑗𝑋𝑇
̅̅̅̅ ̅̅̅̅ ̅̅̅2 𝑉̅1
𝑉 = 𝛼
̅̅̅(𝑉
1 𝑚 − 𝑉𝑛 ) − 𝛼
2.48
2.49
Dimana
𝑉̅1 = 𝐾𝑠𝑒 𝑉𝑑𝑐 𝑒 𝑗𝛽
𝛼1 =
̅̅̅
𝛼2 =
̅̅̅
𝑅𝑠𝑒 +𝑗𝑋𝑠𝑒
(𝑅𝑇 − 𝑅𝑠𝑒 )+𝑗(𝑋𝑇 +𝑋𝑠𝑒 )
𝑅𝑠𝑒 +𝑗𝑋𝑠𝑒
(𝑅𝑇 − 𝑅𝑠𝑒 )+𝑗(𝑋𝑇 +𝑋𝑠𝑒 )
2.50
2.51
2.52
UPFC dapat mengubah tiga parameter dari aliran daya ( magnitude tegangan, impedans
saluran, dan sudut fasa ) secara simultan. Hal tersebut membuat UPFC mampu mengontrol
aliran daya aktif dan reaktif yang mengalir pada saluran secara independen. Beberapa penelitian
telah dilakukan dan dilaporkan dalam beberapa literaur bahwa karena kecepatan respon yang
sangat tinggi, UPFC mampu berperan secara signifikan dalam perbaikan kesetabilan transien
dan osciallaoty .
Pada umumnya UPFC dimpelmentasikan pada saluran transmisi yang panjang,
Beberapa fungsi UPFC yang umum digunakan adalah : penjadwalan aliran daya, perbaikan
tegangan, perbaikan tegangan ujung, pembatasi arus hubung singkat, meredam oscilasi sistem,
dan peningkatan kesetabialan transien.