Uploaded by
Nasution Nadenggan
Perancangan Sistem Pengendalian BLDC dengan Logika Fuzzy
advertisement

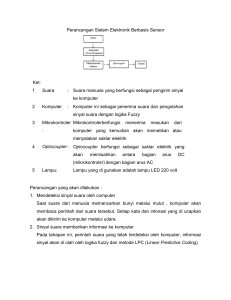
54 BAB III PERANCANGAN SISTEM A. Desain Perangkat Keras Perangkat keras yang digunakan dalam sistem pengendalian BLDC dengan metode fuzzy logic terdiri dari Arduino uno, inverter driver 3 fasa, berikut gambaran sistem secara lengkap: Gambar 15. Sistem Pengendali Secara Umum Gambar 16. Desain Perangkat Keras 55 B. Arduino Uno Arduino uno berfungsi untuk mengendalikan motor dengan sistem logika fuzzy menuju gate, Arduino uno akan menjalankan logika fuzzy untuk mengubah komutasi motor BLDC berdasarkan kombinasi dari keluaran sensor hall yang dibaca oleh FCL. Selain itu Arduino uno mendapatkan data kecepatan motor dan menampilkan output pada putaran motor. Data kecepatan motor didapat melaluideteksi perubahan medan magnet motor yang ditangkap oleh sensor hall. Tiap perubahan medan magnet yang dideteksi akan selalu dijumlahkan dan hasilnya akan dikirim ke output. Karena motor terdiri dari 12 pole, setiap 12 perubahan medan magnet pada tiap-tiap sensor hall. Sehingga untuk satu putaran mekanik terdapat 36 perubahan medan magnet yang didapatkan ketiga sensor. Oleh karena itu: Mechround (t) = ∑ 𝑀𝑒𝑑𝑎𝑛 𝑀𝑎𝑔𝑛𝑒𝑡 36 (17) C. Sensor Hall Sensor hall berfungsi untuk menentukan timing perubahan komutasi dan mengukur kecepatan dari motor. Untuk mendapatkan 6 kombinasi keluaran sensor hall seperti pada gambar 2.7, sensor hall harus dipisahkan masing – masing sebesar 20 derajat. Hal ini terjadi karena motor BLDC yang digunakan memiliki 12 pole. Dengan menggunakan rumus berikut: Letak Sensor = 120 𝐽𝑚𝑙 𝑝𝑎𝑠𝑎𝑛𝑔𝑎𝑛 𝑝𝑜𝑙𝑒 (18) 56 Maka didapatkan letak sensor satu dengan lainnya sebesar 20 derajat dan 40 derajat. Karena dimensi dari sensor hall itu sendiri, salah satu sensor hall yang berbeda 20 derajat dipindahkan 180 derajat menjadi 200 derajat. Pada implementasi perangkat keras pada skripsi ini, sensor hall dapat diletakkan di luar motor. Hal ini terjadi karena motor BLDC yang digunakan pada skripsi ini memiliki rotor di luar kumparan stator. Gambar 21. konstruksi sensor hall dan motor D. Motor BLDC Motor BLDC yang digunakan adalah motor BLDC E bike hub, motor E bike hub menggunakan alat mekanis yang disebut dengan sikat karbon komulator dan dua kontak yang disebut dengan sikat karbon balikkan arus listrik secara berkala dan pastikan asnya berputar kearah yang sama. E bike hub adalah motor tanpa sikat yang menggantikan komulator dan sikat dengan roda gigi planet dan sirkuit eketronik. Sensor efek hall membantu untuk 57 menemukan posisi magnet permanen dan kumparan mana yang harus diaktifkan untuk mempertahankan motor berputar. Selain medan magnet permanen, mode eksitasi E bike hub juga bisa menjadi eksitasi seri. E bike hub seri memiliki karakteristik kerja yang lembut, kinerja pengaturan kecepatan yang baik, dan torsi awal yang besar. Gambar 22. Motor E Bike Hub E. Inverter Tiga Fasa Gambar 23. Inverter Tiga Fasa Untuk mengatur kecepatan motor induksi dengan menggunakan inverter PWM sebagai suplai daya yang mengubah tegangan searah menjadi 58 tegangan variabel dan frekuensi variabel dalam rangka memperoleh kecepatan yang sesuai dengan perubahan beban. Gambar 24 dibawah ini menunjukkan sebuah sistem pengaturan kecepatan motor induksi menggunakan inverter PWM. Gambar 24. Sistem Pengaturan Kecepatan Motor Menggunakan PWM Gambar 25. Diagram Pembentukan Sinyal Pwm F. Algoritma Pengendalian Algoritma pengendali dan fungsi-fungsi komunikasi diimplementasikan ke dalam arduino uno dengan menggunakan fungsi-fungsi interrupt. Implementasi dari perangkat lunak tersebut adalah sebagai berikut: a. Inisialisasi modul komunikasi, logika fuzzy, dan port I/O 59 b. Baca sensor hall dan putar motor secara open loop dengan FLC (Fuzzy Logic Control) awal yang sesuai dengan kombinasi sensor hall. Pada kondisi open loop tetap terjadi pembacaan sensor hall dan terus bertambah hingga yang di-set. c. Setelah motor berputar beberapa saat, jalankan algoritma closed-loop: 1. Baca sensor hall menggunakan logika fuzzy. 2. Apabila terjadi perubahan kombinasi sensor hall yang dibaca oleh logika fuzzy ubah step komutasi dan jalankan FLC sesuai dengan step komutasi baru dan table lookup. 3. Berikan output berupa kecepatan motor pada user setiap 15 detik. 4. Apabila motor slip, matikan seluruh proses. Untuk mengulang kembali diperlukan hard reset dari user. Gambar 26. Algoritma Pengendali