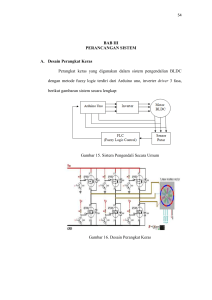
Perancangan Sistem Elektronik Berbasis Sensor Ket: 1 Suara : Suara manusia yang berfungsi sebagai pengirim sinyal ke komputer 2 Komputer : Komputer ini sebagai penerima suara dan pengolahan sinyal suara dengan logika Fuzzy 3 Mikrokontroler Mikrokontrolerberfungsi : menerima masukan dari komputer yang kemudian akan mematikan atau menyalakan saklar elektrik 4 Optocoupler : Optocoupler berfungsi sebagai saklar elektrik yang akan memisahkan antara bagian arus DC (mikrokontroler) dengan bagian arus AC 5 Lampu: Lampu yang di gunakan adalah lampu LED 220 volt Perancangan yang akan dilakukan : 1. Mendeteksi sinyal suara oleh computer Saat suara dari manusia memancarkan bunyi melalui mulut , komputer akan membaca perintah dari suara tersebut. Setiap kata dan intonasi yang di ucapkan akan dikirim ke komputer melalui udara. 2. Sinyal suara memberikan informasi ke komputer Pada tahapan ini, perintah suara yang telah terdeteksi oleh komputer, informasi sinyal akan di olah oleh logika fuzzy dan metode LPC (Linear Predictive Coding). Informasi yang telah diolah oleh logika fuzzy dan metode LPC dikirimkan ke Arduino Uno. Pada tahapan ini sinyal yang telah diterima dari komputer, maka sinyal akan diolah oleh mikrokontroler dan setelah itu sinyal siap untuk dipancarkan dan dapat diterima oleh Optocoupler .setelah itu lampu dapat di jalajankan Gambar Flowchart Rangkaian Perancangan Sistem Elektronik Berbasis Aktuator No 1 2 3 4 5 Tabel Kebutuhan Alat Spesifikasi Keterangan Panjang 1100 mm Lebar 1100 mm Tinggi 1400 mm Struktur bahan Alumunium profile, Acrylic, Besi, Nilon, Karet Baterai 24 V ,8 AH Adapun sistem pengolah data pada robot lengan raket dengan menggunakan IC AT mega 128 sebagai ADC yang mendeteksi sinyal analog joystick serta sebagai generator pulsa PWM. Selanjutnya sinyal-sinyal digital PWM digunakan untuk mengendalikan motor- motor penggerak dan PWM pengontrol servo. Sumber tegangan yang digunakan untuk mencatu rangkaian dan motor penggerak adalah lipo battery dengan kapasitas 24 volt, 8 AH. Adapun blok diagram skematik robot seperti terlihat pada Gambar 2 berikut: Perancangan Sistem Elektronik Berbasis Transducer Pada rancangan bangun ini juga dilengkapi dengan catu daya, mikrokontroler ATMega`16 sebagai pengolah data hasil dari pengukuran dan LCD untuk tampilan keluarannya. pengendalian ini, catu daya digunakan untuk mengaktifkan sensor – sensor pada rangkaian. Mikrokontroler ATMega 16 sebagai pengontrol dan pengolah data. Mikrokontroler Atmega16 ini akan menerima data dari sensor TDS dan ultrasonik, dimana data dari sensor TDS dan ultrasonik nantinya akan ditampilkan ke LCD. Berikut merupakan gambar rangkaian minimum system dari ATmega 16 : Sensor ketinggian yang digunakan adalah sensor ultrasonik PING))) yang bekerja berdasarkan pantulan sinyal ultrasonik. Kelebihan sensor ini ialah hanya perlu pulsa trigger sebesar 5µs untuk memicu masukan.