IEEE Paper Template in A4 (V1) - Fakultas Teknik – UNTAG Cirebon
advertisement
 - Fakultas Teknik – UNTAG Cirebon")
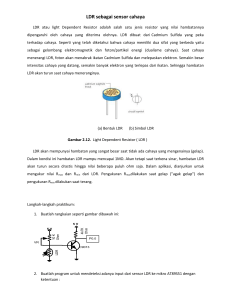
Desain Automasi Reverse Forward Motor DC berbasis Mikrokontroler dan Sel Surya sebagai Pasokan Energi Andri puguh1, Erfan subiyanta2, Agus Siswanto3 1 Mahasiswa Teknik Elektro Universitas17 Agustus1945 Cirebon 2,3 Dosen Teknik Elektro Universitas17 Agustus1945 Cirebon 1 [email protected], 3 [email protected], Abstrak — Alat membuka dan menutup tirai atau gorden secara otomatis bekerja berdasarkan prinsip mikrocontroller menggunakan sensor LDR, motor dc sebagai penggerak tirai dan memanfaatkan sell surya sebagai sumber energi. Motor dc menggerakan belt yang kemudian dapat menggeserkan tirai. Jika sensor LDR (Light Dependent Resistor ) menerima cahaya lebih dari batas atas yang telah ditentukan pada program maka motor bergerak, dan apabila cahaya yang diterima oleh LDR (Light Dependent Resistor ) kurang dari batas bawah yang telah ditentukan pula maka motor akan bergerak ke arah berlawanan. Dan jika sensor LDR (Light Dependent Resistor ) berada diantara kedua batas tersebut maka tirai berhenti. Alat pembuka / penutup tirai atau gorden otomatis dapat di aplikasikan pada tempat tinggal, alat ini dapat bekerja sendiri saat sensor LDR (Light Dependent Resistor )menerima cahaya matahari sehingga penghuni tidak harus membuka dan menutup tirai atai gorden secara manual,Alat ini juga hemat listrik karena alat ini menggunakan sel surya sebagai sumber energi yang memenfaatkan cahaya matahari. [email protected] banyak sekali yang terbuat dari alat elektronika mulai dari mesin cuci, kompor listrik, pendingin ruangan, dan lainlain. Salah satu peralatan rumah tangga yang tidak kalah penting dengan peralatan yang lain yaitu tirai atau gorden. Tirai atau gorden adalah potongan kain atau tekstil yang digunakan untuk menghalangi cahaya. Tirai biasa digantung di bagian dalam jendela suatu bangunan untuk menghalangi masuknya cahaya. Pada saat malam untuk mencegah cahaya keluar dari bangunan, mencegah orang di luar untuk dapat melihat bagian dalam ruangan, sering kali untuk alasan privasi. Walaupun tirai tergolong peralatan rumah tangga yang sederhana akan tetapi penggunaannya sangat diperlukan. Membuka dan menutup tirai menjadi pekerjaan yang sering terlupakan, hal tersebut terjadi karena begitu banyak ruangan yang ada sehingga merepotkan apabila harus menutup dan membuka tirai satu persatu disetiap ruangan yang ada. Berdasarkan latar belakang tersebut maka penulis membuat judul tugas akhir yaitu ―Desain Automasi Reverse-Forward Motor DC Berbasis Mikrokontroler dan Sel Surya Sebagai Pasokan Energi‖. Oleh karena itu, pembuatan alat penggerak tirai otomatis ini sangat diperlukan. Untuk dapat membuka atau menutup tirai secara otomatis menggunakan mickrokontroller arduino uno ini sangat ramah lingungan, karena alat ini memanfaatkan sell surya atau tenaga matahari sehingga tidak perlu menggunakan listrik PLN untuk menjalankan alat tersebut. Sistem kendali otomatis tirai bekerja pada saat pagi hari dan sore hari, ketika ada cahaya masuk dipagi hari maka otomatis tirai akan terbuka, dan pada saat hari mulai gelap tirai otomatis akan menutup sendiri. Kata kunci : Motor DC, Microcontroller, LDR, dan Sel Surya. I. 2 PENDAHULUAN Dengan kemajuan teknologi elektronika yang sangat pesat dan begitu cepat mengalami revolusi melalui sarana atau media. Berbagai jenis peralatan telah dibuat oleh manusia untuk memenuhi keinginan dan kebutuhan dalam menjalankan segala aktivitas. Kemajuan ilmu pengetahuan dan teknologi mendorong manusia untuk berusaha mengatasi masalah yang timbul disekitarnya. Pada era modern seperti sekarang, manusia lebih cenderung membutuhkan alat-alat elektronika yang canggih untuk membantu pekerjaan mereka menjadi lebih mudah dan praktis. Mulai dari peralatan rumah tangga, alat komunikasi, sistem keamanan, dan lain-lain yang sudah digantikan menggunakan alat-alat elektronika yang canggih. Saat ini peralatan rumah tangga juga sudah II. DASAR TEORI A. Motor DC Motor DC ( arus searah ) adalah Sebuah motor listrik yang mengubah energi listrik menjadi energi mekanik. Kebanyakan motor listrik beroperasi melalui interaksi medan magnet dan konduktor pembawa arus untuk menghasilkan kekuatan, meskipun motor 61 elektrostatik menggunakan gaya elektrostatik. Proses menghasilkan energi listrik dari energi mekanik, yang dilakukan oleh generator seperti alternator, atau dinamo. Banyak jenis motor listrik dapat dijalankan sebagai generator. Motor listrik dan generator yang sering disebut sebagai mesin-mesin listrik. Motor listrik DC (arus searah) merupakan salah satu dari motor DC. Mesin arus searah dapat berupa generator DC atau motor DC. Generator DC alat yang mengubah energi mekanik menjadi energi listrik DC. Motor DC alat yang mengubah energi listrik DC menjadi energi mekanik putaran. Sebuah motor DC dapat difungsikan sebagai generator , generator DC juga dapat difungsikan sebagai motor DC. Pada motor DC kumparan medan disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika tejadi putaran pada kumparan jangkar dalam pada medan magnet, maka timbul tagangan GGL ( Gaya Gerak Listrik) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip dari arus searah adalah membalik phasa negatif dari gelombang sinusoidal menjadi gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet, dihasilkan tegangan GGL ( Gaya Gerak Listrik ). 6 c. Sikat-sikat: Sikat - sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas, dan juga memegang peranan penting untuk terjadi proses komutasi. d. Komutator : Komutator ini berfungsi sebagai penyearah mekanik yang dipakai bersama-sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi terjadi pada saat sisi kumparan berbeda. e. Jangkar: Jangkar dibuat dari bahan ferromagnetic dengan maksud agar kumparan jangkar terletak dalam daerah yang induksi magnetik besar, agar ggl induksi yang dihasilkan dapat bertambah besar. f. Lilitan jangkar: Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah, berfungsi untuk tempat timbul tenaga putar motor. 1) Prinsip Kerja Motor DC : Jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor. Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor. Dapat dilihat pada gambar 2.2. Gambar 2.1 Bagian-bagian dari motor DC Fungsi bagian bagian Motor DC a. Badan Mesin: Badan mesin ini berfungsi sebagai tempat mengalirnya fluks magnet yang dihasilkan kutub magnet, sehingga harus terbuat dari bahan ferromagnetik. Fungsi lain adalah untuk meletakkan alat-alat tertentu dan mengelilingi bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar kuat, seperti dari besi tuang dan plat campuran baja. b. Gambar 2.2 Konduktor Yang Dikelilingi Medan Magnet Pada motor dc, daerah kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar 2.3. Inti Kutub Magnet dan Belitan Penguat Magnet : Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan mesin. 62 listrik dalam dinamo. Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya. Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam tiga kelompok : 1. Gambar 2.3 Proses Perubahan Energi Pada Medan Magnet Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.Untuk menentukan arah putaran motor digunakan kaedah Flamming tangan kiri. Kutubkutub magnet menghasilkan medan magnet dengan arah dari kutub utara ke kutub selatan. Jika medan magnet memotong sebuah kawat penghantar yang dialiri arus searah dengan empat jari, maka timbul gerak searah ibu jari. Gaya ini disebut gaya Lorentz, yang besarnya sama dengan F. Prinsip motor adalah aliran arus di dalam penghantar yang berada di dalam pengaruh medan magnet akan menghasilkan gerakan. Besarnya gaya pada penghantar akan bertambah besar jika arus yang melalui penghantar bertambah besar.Motor DC memiliki tiga komponen utama: 2. 3. Beban torque konstan adalah beban permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan. Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatn operasi. Beban variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kuadrat kecepatan). Beban dengan energi konstan adalah beban dengan permintaan torque yangberubah dan berbanding terbalik dengan kecepatan. Untuk beban dengan daya konstan adalah peralatanperalatan mesin. 2) Jenis-Jenis Motor DC a. a. Kutub Medan Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet.Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan. Motor Arus Searah Penguat Terpisah Motor jenis ini, penguat magnet mendapat arus dari sumber tersendiri dan terpisah dengan sumber arus ke rotor. Sehingga arus yang diberikan untuk jangkar dengan arus yang diberikan untuk penguat magnet tidak terikat antara satu dengan lainnya secara kelistrikan. Gambar 2.4 Rangkaian motor DC dengan Penguat Terpisah b. Dinamo Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan dinamo. b. c. Commutator Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus Motor Arus Searah dengan Penguat Sendiri Motor jenis ini yaitu jika arus penguat magnet diperoleh dari motor itu sendiri. Berdasarkan hubungan lilitan penguat magnet terhadap lilitan jangkar motor DC dengan penguat sendiri dapat dibedakan : 1. Motor DC Shunt Motor ini dinamakan motor DC shunt karena cara pengkabelan motor ini yang parallel 63 (shunt) dengan kumparan armature. Motor DC shunt berbeda dengan motor yang sejenis terutama pada gulungan kawat yang terkoneksi parallel dengan medan armature. Harus ingat bahawa teori elektronika dasar bahwa sebuah sirkuit yang parallel juga disebut sebagai shunt. Karena gulungan kawat diparalel dengan armature, maka disebut sebagai shunt winding dan motor disebut shunt motor. Motor DC shunt memiliki skema berikut: Gambar 2.6 Karakteristik Motor dc shunt 2. Motor DC Seri Motor ini dipasang secara seri dengan kumparan armature. Motor ini, kurang stabil. Pada torsi yang tinggi kecepatan menurun bila kecepatannya rendahmaka kecepetan motor naik. Namun, pada saat tidak terdapat beban motor ini akan cenderung menghasilkan kecepatan yang sangat tinggi. Tenaga putaran yang besar ini dibutuhkan pada elevator dan Electric Traction. Kecepatan ini juga dibutuhkan pada mesin jahit. Motor DC disusun dengan skema berikut: Gambar 2.5 Rangkaian Motor DC shunt Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo (A). Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo. Karakter kecepatan motor DC tipe shunt adalah : 1. 2. Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torque tertentu setelah kecepatannya berkurang) dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin. Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah). Gambar 2.7 Rangkaian Motor DC Seri Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan dinamo (A). Oleh karena itu, arus medan sama dengan arus dinamo. Karakter kecepatan dari motor DC tipe seri adalah : Motor ini tidak dapat memproduksi arus yang besar ketika mulai melakukan putaran seperti pada medan kumparan seri. Hal ini berarti motor parallel mempunyai torsi awal yang lemah. Ketika voltase diaplikasikan ke motor listrik, resistansi yang tinggi pada kumparan parallel menjaga arus mengalir lambat. Kumparan armature untuk motor shunt juga sama dengan motor seri dan menggunakan arus untuk memproduksi medan magnetik yang cukup kuat untuk membuat kumparan armature memulai putaran. Dalam industry, motor shunt digunakan pada Mesin bubut, Drills, Boring Mills, pembentuk, dan Spinning. Berikut adalah contoh boring mills yang sering digunakan pada industri. Motor shunt mempunyai kecapatan hampir konstan. Pada tegangan jepit konstan, motor ini mempunyai putaran yang hampir konstan walaupun terjadi perubahan beban. Perubahan kecepatan hanya sekitar 10 %. Untuk pemakaian kipas angin, blower, pompa centrifugal, elevator, pengaduk, mesin cetak, dan juga untuk pengerjaan kayu dan logam. 1. 2. Kecepatan dibatasi pada 5000 RPM Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali. Karena kumparan medan terseri dengan kumparan armature, motor DC seri membutuhkan jumlah arus yang sama dengan arus yang mengalir melalui kumparan armature. Pengoperasian dari motor ini sangat mudah untuk dimengerti. Kumparan medan terkoneksi secara seri dengan kumparan armature. Hal ini berarti bahwa power teraplikasi pada salah satu ujung dari kumparan medan yang seri dan ujung lain dari kumparan armature yang terkoneksi dengan brush. Ketika voltase diberikan, arus mulai mengalir dari terminal power supply yang negative ke kumparan yang seri dan kumparan armature. Kumparan armature tidak berputar ketika tegangan pertama kali diberikan dan satu-satunya hambatan pada sirkuit berasal dari konduktor yang digunakan pada armature dan kumparan penguat medan. 64 Kerena konduktor ini sangat besar, maka konduktor ini hanya memiliki hambatan yang kecil. Hal ini menyebabkan motor mengambil arus yang besar dari power supply. Ketika arus yang besar mulai mengalir ke kumparan penguat medan dan kumparan armature maka terbentuk medan magnetic yang cukup kuat. Karena arusnya amat besar, hal ini menyebabkan kumparan menjadi jenuh, yang akan memproduksi medan magnet yang amat kuat. Dalam industri, motor ini digunakan sebagai electric traction, elevator, kompresor udara, penyedot debu, dan pengering rambut. Yang biasa ditemui pada mesin mobil. Ketika pada saat pertama kali dihidupkan, mobil memerlukan tenaga putaran yang kuat untuk membuat mesin dalam mobil hidup. Motor-motor seri cocok untuk penggunaan yang memerlukan torsi penyalaan awal yang tinggi, seperti derek dan alat pengangkat hoist Karakter dari motor DC tipe kompon / gabungan ini adalah, makin tinggi persentase penggabungan ( yakni persentase gulungan medan yang dihubungkan secara seri ) , makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini. Pada motor kompon mempunyai dua buah kumparan medan dihubungkan seri dan paralel dengan angker. Bila motor seri diberi penguat shunt tambahan seperti gambar dibawah disebut motor kompon shunt panjang. Gambar 2.10 Rangkaian Motor DC Kompon Panjang Bila motor shunt diberi tambahan penguat seri seperti pada Gambar 2.11 disebut motor kompon shunt pendek Gambar 2.8 Karakteristik Motor DC seri 3. Motor DC Kompon Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan dinamo (A). Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil. Makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini. Dalam industri, motor ini digunakan untuk pekerjaan apa saja yang membutuhkan torsi besar dan kecepatan yang constant. Gambar 2.11 Rangkaian Motor Kompon Pendek B. Arduino Uno Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada ATmega328. Arduino UNO mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino UNO memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah menghubungkannya ke sebuah computer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya Gambar 2.9 Karakteristk Motor DC kompon 65 Clock Speed 16 MHz Referensi desain Arduino dapat menggunakan sebuah Atmega8, 168, atau 328, model saat ini menggunakan Atmega328, tetapi Atmega8 ditampilkan pada skema sebagai referensi. Konfigurasi pin identik pada semua ketiga prosesor tersebut.Daya (Power) Arduino UNO dapat disuplai melalui koneksi USB atau dengan sebuah power suplai eksternal. Sumber daya dipilih secara otomatis. Suplai eksternal (non-USB) dapat diperoleh dari sebuah adaptor AC ke DC atau battery. Adaptor dapat dihubungkan dengan mencolokkan sebuah center-positive plug yang memliki panjang 2,1 mm ke power jack dari board. Kabel lead dari sebuah battery dapat dimasukkan dalam header/kepala pin Ground (Gnd) dan pin Vin dari konektor POWER.Board Arduino UNO dapat beroperasi pada sebuah suplai eksternal 6 sampai 20 Volt. Jika disuplai dengan yang lebih kecil dari 7 V, kiranya pin 5 Volt mungkin mensuplai kecil dari 5 Volt dan board Arduino UNO bisa menjadi tidak stabil. Jika menggunakan suplai yang lebih dari besar 12 Volt, voltage regulator bisa kelebihan panas dan membahayakan board Arduino UNO. Pin-pin dayanya adalah sebagai berikut: 1. VIN. Tegangan input ke Arduino board ketika board sedang menggunakan sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lain yang diatur). yang dapat menyuplai tegangan melalui pin ini, atau jika penyuplaian tegangan melalui power jack, aksesnya melalui pin ini. 2. 5V. Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada board. Board dapat disuplai dengan salah satu suplai dari DC power jack (7-12V), USB connector (5V), atau pin VIN dari board (7-12). Penyuplaian tegangan melalui pin 5V atau 3,3V membypass regulator, dan dapat membahayakan board. Hal itu tidak dianjurkan. 3. 3V3. Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus maksimum yang dapat dilalui adalah 50 mA. 4. GND. Pin ground. Gambar 2.13 Arduino Uno Arduino Uno berbeda dari semua board Arduino sebelumnya, Arduino UNO tidak menggunakan chip driver FTDI USB-to-serial. Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) diprogram sebagai sebuah pengubah USB ke serial. Revisi 2 dari board Arduino Uno mempunyai sebuah resistor yang menarik garis 8U2 HWB ke ground, yang membuatnya lebih mudah untuk diletakkan ke dalam DFU mode. Revisi 3 dari board Arduino UNO memiliki fiturfitur baru sebagai berikut: 1. Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke depannya, shield dijadikan kompatibel / cocok dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya 2. Sirkit RESET yang lebih kuat 3. Atmega 16U2 menggantikan 8U2 ―Uno‖ berarti satu dalam bahasa Italia dan dinamai untuk menandakan keluaran (produk) Arduino 1.0 selanjutnya. Arduino UNO dan versi 1.0 akan menjadi referensi untuk versi-versi Arduino selanjutnya. Arduino UNO adalah sebuah seri terakhir dari board Arduino USB dan model referensi untuk papan Arduino.Untuk mengetahiu data data tentang Arduino uno dapa dilihat secara Ringkas Pada tabel 2.1. 1)Memori: ATmega 328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader). ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis (RW/read and written) dengan EEPROM library). Tabel 2. 1 Spesifikasi Arduino Uno Mikrokontroler ATmega328 Tegangan pengoperasian 5V Tegangan input yang 7-12V disarankan Batas tegangan input 6-20V 14 (6 di antaranya menyediakan keluaran Jumlah pin I/O digital PWM) Jumlah pin input analog 6 Arus DC tiap pin I/O 40 Ma Arus DC untuk pin 3.3V 50 Ma 32 KB (ATmega328), sekitar 0.5 KB Memori Flash digunakan oleh bootloader SRAM 2 KB (ATmega328) EEPROM 1 KB (ATmega328) 2) Input dan Output: Setiap 14 pin digital pada Arduino Uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(),digitalWrite(), dan digitalRead(). Fungsi-fungsi tersebut beroperasi di tegangan 5 Volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai fungsi-fungsi spesial: 1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan memancarkan (TX) serial data 66 2. 3. 4. 5. TTL (Transistor-Transistor Logic). Kedua pin ini dihubungkan ke pin-pin yang sesuai dari chip Serial Atmega8U2 USB-ke-TTL. External Interrupts: 2 dan 3. Pin-pin ini dapat dikonfigurasikan untuk dipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatu perubahan nilai. Lihat fungsi attachInterrupt() untuk lebih jelasnya. PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsi analogWrite(). SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakan SPI library. LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati. 4)Programming :Arduino UNO dapat diprogram dengan software Arduino. Pilih ―Arduino Uno dari menu Tools > Board(termasuk mikrokontroler pada board). 5) Proteksi Arus Lebih :USB Arduino UNO mempunyai sebuah sebuah sekring reset yang memproteksi port USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan koneksi sampai hubungan pendek atau kelebihan beban hilang. 6) Karakteristik Fisik :Panjang dan lebar maksimum dari PCB Arduino UNO masing-masingnya adalah 2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas dimensinya. Empat lubang sekrup memungkinkan board untuk dipasangkan ke sebuah permukaan atau kotak. Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil. (0.16"), bukan sebuah kelipatan genap dari jarak 100 mil dari pin lainnya. Arduino UNO mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda). Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya dengan menggunakan pin AREF dan fungsi analog Reference(). Di sisi lain, beberapa pin mempunyai fungsi spesial: 1. TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library 2. Ada sepasang pin lainnya pada board: a. AREF. Referensi tegangan untuk input analog. Digunakan dengan analogReference(). b. Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang memblock sesuatu pada board. C. LDR (Light Dependent Resistor) LDR (Light Dependent Resistor), ialah jenis resistor yang berubah hambatannya karena pengaruh cahaya. Bila cahaya gelap nilai tahanannya semakin besar, sedangkan cahayanya terang nilainya menjadi semakin kecil. LDR (Light Dependent Resistor) adalah jenis resistor yang biasa digunakan sebagai detector cahaya atau pengukur besaran konversi cahaya. Light Dependent Resistor, terdiri dari sebuah cakram semikonduktor yang mempunyai dua buah elekrtroda pada permukaannya. Resistansi LDR berubah seiring dengan perubahan intensitas cahaya yang mengenainya. Dalam keadaan gelap resistansi LDR sekitar 10 M dan dalam keadaan terang sebesar 1 k atau kurang. LDR terbuat dari bahan semikonduktor seperti cadmium sulfide. Dengan bahan ini energy dari cahaya yang jatuh menyebabkan lebih banyak muatan yang dilepas atau arus listrik meningkat. Artinya resistansi bahan telah mengalami penurunan. 3)Komunikasi : Arduino UNO mempunyai sejumlah fasilitas untuk komunikasi dengan sebuah komputer, Arduino lainnya atau mikrokontroler lainnya. Atmega 328 menyediakan serial komunikasi UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 pada channel board serial komunikasinya melalui USB dan muncul sebagai sebuah port virtual ke software pada komputer. Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan. Bagaimanapun, pada Windows, sebuah file inf pasti dibutuhkan. Software Arduino mencakup sebuah serial monitor yang memungkinkan data tekstual terkirim ke dan dari board Arduino. LED RX dan TX pada board akan menyala ketika data sedang ditransmit melalui chip USB-to-serial dan koneksi USB pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). Atmega328 juga mensupport komunikasi I2C (TWI) dan SPI. Software Arduino mencakup sebuah Wire library untuk memudahkan menggunakan bus I2C. Gambar 2. 14 LDR (Light Dependent Resistor) LDR digunakan untuk mengubah energy cahaya menjadi energy listrik. Saklar cahaya otomatis dan alarm pencuri adalah beberapa contoh alat yang menggunakan LDR. Tetapi karena responnya terhadap cahaya cukup lambat, LDR tidak digunakan pada situasi di mana intensitas cahaya berubah secara drastis. Sensor ini akan berubah nilai hambatannya apabila ada perubahan tingkat kecerahan cahaya. 1) 67 Prinsip Kerja LDR: Pada saat gelap atau cahaya redup, bahan dari cakram tersebut menghasilkan elektron bebas dengan jumlah yang relative kecil. dibilang bahasa C adalah induk dari bahasa pemrograman saat ini. Beberapa kelebihan dari bahasa C adalah sebagai berikut : 1. Banyak memiliki operator untuk mengolah / memanipulasi data. 2. Bahasa C termasuk sebagai bahasa yang terstruktur sehingga program dapat lebih mudah dipahami atau dikembangkan. 3. Bahasa C lebih mudah dimengerti karena lebih mirip kepada bahasa manusia. 4. Mengenal data pointer. 5. Bahasa C tersedia hampir di semua jenis computer. 6. Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer. 7. Bahasa C hanya menyediakan sedikit kata-kata kunci, hanya terdapat 32 kata kunci. 8. Proses executable program bahasa C lebih cepat. 9. Dukungan pustaka yang banyak. 10. C adalah bahasa yang terstruktur 11. Bahasa C termasuk bahasa tingkat menengah Sehingga hanya ada sedikit elektron untuk mengangkut muatan elektrit. Artinya pada saat cahaya redup, LDR ( Light Dependent Resistor ) menjadi konduktor yang buruk, atau bisa disebut juga LDR ( Light Dependent Resistor ) memiliki resistansi yang besar pada saat gelap atau cahaya redup. Pada saat cahaya terang, ada lebih banyak elektron yang lepas dari atom bahan semikonduktor tersebut. Sehingga akan lebih banyak elektron untuk mengangkut muatan elektrit. Maka pada saat cahaya terang, LDR ( Light Dependent Resistor )menjadi konduktor yang baik, atau bisa disebut juga LDR ( Light Dependent Resistor ) memiliki resistansi kecil pada saat cahaya terang. Penerapan lain dari sensor LDR ini ialah alarm Pencuri. Misalnya untuk rangkaian system alarm cahaya (menggunakan LDR) yang aktif ketika terdapat cahaya. Ketika kita akan mengatur kepekaan LDR (Light Dependent Resistor) dalam suatu rangkaian maka kita perlu menggunakan potensiometer. Kita atur letaknya agar ketika mendapat cahaya maka buzzer atau bell akan berbunyi dan ketika tidak mendapat cahaya maka buzzer atau bell tidak akan berbunyi. Sedangkan kelemahan dari bahasa C adalah : 1. Banyak operator atau cara penulisan program kadang menimbulkan kebingungan para pemakainya. 2. Perlunya ketelitian dalam penulisan program karena perintah (statement) dalam bahasa C bersifat case sensitif (huruf kapital dan huruf kecil dibedakan. Kekurangan-kekurangan tersebut akan banyak terjadi pada awal-awal mempelajari bahasa C. 3. Bagi pemula pada umumnya akan kesulitan menggunakan pointer. D. Bahasa Pemrograman C Bahasa Pemrograman C diciptakan dan dikembangkan oleh Brian Kernighan dan Denis Ritchie di Bell Research Labs. Bahasa Pemrograman C secara khusus diciptakan dengan tujuan agar para programmer (orang yang membuat program komputer) dapat mengakses seluruh internal register. I/O slots dan absolute address dari sebuah komputer. Pada awal tahun 1960-an, sistem operasi komputer mulai menjadi jauh lebih kompleks karena adanya pengenalan multi terminal dan kemampuan multi prosessor. Pada saat itu, sistem operasi diciptakan dengan menggunakan bahasa assembly (bahasa pemrograman tingkat rendah). Banyak pengembang yang menyadari bahwa suatu sistem operasi dapat dikembangkan lebih lagi, tidak cukup dengan menggunakan bahasa assembly. Inilah asal mula Bahasa C yang dimplementasikan pada Digital Equipment Corporation PDP-7. Pada perkembangan lebih lanjut Bahasa Pemrograman C digunakan untuk mengimplementasikan Sistem Operasi Unix. Bahasa C atau C++ adalah suatu bahasa pemrograman. Bahasa C termasuk sebagai bahasa pemrograman tingkat menengah, bahasa C bias dipelajari dengan lebih mudah karena mudah dimengerti tetapi mempunyai kemampuan yang tinggi. Bahasa C bisa digunakan untuk merekayasa program untuk segala kebutuhan, baik untuk aplikasi bisnis, matematis atau bahkan game. Bahasa Pemrograman C telah mengalami banyak evolusi sejak awal diciptakanya hingga saat ini. Saat ini, banyak Bahasa Pemrograman yang merupakan turunan/varian/keluarga dari Bahasa C seperti: C ++, Java Script, PHP, Java, perl dan lain sebagainya. Bisa juga E. Relay Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A. Gambar 2. 15 Bentuk Relay 68 Gambar 2. 16 Simbol Relay Selain Golongan Relay diatas, terdapat juga Relay-relay yang Pole dan Throw-nya melebihi dari 2 (dua). Misalnya 3PDT (Triple Pole Double Throw) ataupun 4PDT (Four Pole Double Throw) dan lain sebagainya. Untuk lebih jelas mengenai Penggolongan Relay berdasarkan Jumlah Pole dan Throw, dapat dilihat pada Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu : 1. Electromagnet (Coil) 2. Armature 3. Switch Contact Point (Saklar) 4. Spring Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu : 1. Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup) 2. Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka) Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila kumparan Coil diberikan arus listrik, maka akan timbul gaya elektromagnet yang kemudian menarik armature untuk berpindah dari Posisi sebelum (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). Posisi dimana armature tersebut berada sebelumnya (NC) menjadi OPEN atau tidak terhubung. Pada saat tidak dialiri arus listrik, Armature akan kembali lagi ke posisi Awal (NC). Coil yang digunakan oleh Relay untuk menarik Contact Poin ke Posisi Close biasa hanya membutuhkan arus listrik yang relatif kecil. Gambar 2.17 : Gambar 2.17 Relay berdasarkan Pole dan Throw 2) 1) Arti Pole dan Throw pada Relay: Karena Relay merupakan salah satu jenis dari Saklar, maka istilah Pole dan Throw yang dipakai dalam Saklar juga berlaku pada Relay. Berikut ini adalah penjelasan singkat mengenai Istilah Pole and Throw : 1. Pole : Banyaknya Kontak (Contact) yang dimiliki oleh sebuah relay 2. Throw : Banyaknya kondisi yang dimiliki oleh sebuah Kontak (Contact) Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi : 1. Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil. 2. Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil. 3. Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil. 4. Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil. Fungsi-fungsi dan Aplikasi Relay: Beberapa fungsi Relay yang telah umum diaplikasikan kedalam peralatan Elektronika diantaranya adalah : 1. Relay digunakan untuk menjalankan Fungsi Logika (Logic Function) 2. Relay digunakan untuk memberikan Fungsi penundaan waktu (Time Delay Function) 3. Relay digunakan untuk mengendalikan Sirkuit Tegangan tinggi dengan bantuan dari Signal Tegangan rendah. Ada juga Relay yang berfungsi untuk melindungi Motor ataupun komponen lainnya dari kelebihan Tegangan ataupun hubung singkat. F. IC Driver Motor Shield IC L293D L293D adalah driver motor sirkuit terpadu (IC). Motor driver bertindak sebagai penguat arus karena mereka mengambil sinyal kontrol arus rendah dan memberikan sinyal arus yang lebih tinggi. Sinyal arus yang lebih tinggi ini digunakan untuk menggerakkan motor. L293D berisi dua jembatan sirkuit sopir inbuilt. motor DC dapat digerakkan secara bersamaan, baik dalam arah maju dan mundur. Operasi dua motor dapat dikendalikan oleh logika masukan pada pin 2 & 7 dan 10 & 15. Masukan logika 00 atau 11 akan menghentikan motor yang sesuai. Logika 01 dan 10 akan memutar searah jarum jam dan berlawanan arah jarum jam arah, masing- masing. Namun, pada Tugas akhir ini saya hanya menggunakan satu motor saja yaitu pada sisi pin 1 hingga pin 8. 69 G. Gambar 2.19 menunjukan ilustrasi sel surya dan juga bagian-bagian lain Secara umum terdiri dari : Sel surya 1. Substrat/Metal backing Selsurya atau juga sering disebut fotovoltaik adalah divais yang mampu mengkonversi langsung cahaya matahari menjadi listrik. Sel surya bisa disebut sebagai pemeran utama untuk memaksimalkan potensi sangat besar energi cahaya matahari yang sampai kebumi, walaupun selain dipergunakan untuk menghasilkan listrik, energi dari matahari juga bisa dimaksimalkan energi panasnya melalui sistem solar thermal.Sel surya dapat dianalogikan sebagai divais dengan dua terminal atau sambungan, pada saat kondisi gelap atau tidak cukup cahaya berfungsi seperti dioda, dan saat disinari dengan cahaya matahari dapat menghasilkan tegangan. Ketika disinari, maka satu sel surya komersial menghasilkan tegangan dc sebesar 0,5 sampai 1 volt, dan arus shortcircuit dalam skala milliampere per cm2. Besar tegangan dan arus ini tidak cukup untuk berbagai aplikasi, sehingga umumnya sejumlah sel surya disusun secara seri membentuk modul surya. Satu modul surya biasanya terdiri dari 28-36 sel surya, dan total menghasilkan tegangan dc sebesar 12 V dalam kondisi penyinaran standar (Air Mass 1.5). Modul surya tersebut bisa digabungkan secara paralel atau seri untuk memperbesar total tegangan dan arus outputnya sesuai dengan daya yang dibutuhkan untuk aplikasi tertentu. Ilustrasi dari modul surya dapat dilihat pada gambar 2.18. Substrat adalah material yang menopang seluruh komponen sel surya. Material substrat juga harus mempunyai konduktifitas listrik yang baik karena juga berfungsi sebagai kontak terminal positif sel surya, sehinga biasa digunakan material metal atau logam seperti aluminium atau molybdenum. Untuk sel surya dyesensitized DSSC( Dye Sensityzed Solar Cells ) dan sel surya organik, substrat juga berfungsi sebagai tempat masuknya cahaya sehingga material yang digunakan yaitu material yang konduktif tapi juga transparan sepertiii ITO ( Indium Tin Oxide) dan FTO ( Flourine Doped Tin Oxide ). 2. Material Semikonduktor Material semikonduktor merupakan bagian inti dari sel surya yang biasanya mempunyai tebal sampai beberapa ratus mikrometer untuk sel surya generasi pertama (silikon), dan 1-3 mikrometer untuk sel surya lapisan tipis. Material semikonduktor inilah yang berfungsi menyerap cahaya dari sinar matahari. Untuk kasus pad Gambar 2.23, semikonduktor yang digunakan adalah material silikon, yang umum diaplikasikan di industri elektronik. Sedangkan untuk sel surya lapisan tipis, material semikonduktor yang umum digunakan dan telah masuk pasaran yaitu contohnya material Cu(In,Ga)(S,Se)2 (CIGS), CdTe (kadmium telluride), dan amorphous silikon, disamping material-material semikonduktor potensial lain yang dalam sedang dalam penelitian intensif seperti Cu2ZnSn(S,Se)4 (CZTS) dan Cu2O (copper oxide). Gambar 2.18 Modul Sel Surya Bagian semikonduktor tersebut terdiri dari junction atau gabungan dari dua material semikonduktor yaitu semikonduktor tipe-p (material-material yang disebutkan diatas) dan tipe-n (silikon tipe-n, CdS,dll) yang membentuk p-n junction. P-n junction ini menjadi kunci dari prinsip kerja sel surya. Pengertian semikonduktor tipe-p, tipe-n, dan juga prinsip p-n junction dan sel surya akan dibahas dibagian ―cara kerja sel surya‖. 1) Struktur Sel Surya : Sesuai dengan perkembangan sains&teknologi, jenis-jenis teknologi sel surya pun berkembang dengan berbagai inovasi. Ada yang disebut sel surya generasi satu, dua, tiga dan empat, dengan struktur atau bagian-bagian penyusun sel yang berbeda pula.Struktur dan cara kerja dari sel surya umum berada dipasaran saat ini yaitu sel surya berbasis material silikon juga secara umum mencakup struktur dan cara kerja sel surya generasi pertama (sel surya silikon) dan kedua (thin film/lapisan tipis). 3. Kontak Metal/Contact Grid Selain substrat sebagai kontak positif, diatas sebagian material semikonduktor biasa dilapiskan material metal atau material konduktif transparan sebagai kontak negatif. 4. Gambar 2. 19 Struktur Sel Surya komersial yang menggunakan material silikon sebagai semikonduktor. Lapisan Antireflektif Refleksi cahaya harus diminimalisir agar mengoptimalkan cahaya yang terserap oleh semikonduktor. Oleh karena itu biasanya sel surya dilapisi oleh lapisan anti-refleksi. Material anti-refleksi ini adalah 70 lapisan tipis material dengan besar indeks refraktif optik antara semikonduktor dan udara yang menyebabkan cahaya dibelokkan ke arah semikonduktor sehingga meminimumkan cahaya yang dipantulkan kembali. 5. Enkapsulasi / Cover Glass Bagian ini berfungsi sebagai enkapsulasi untuk melindungi modul surya dari hujan atau kotoran. 2) Cara kerja sel surya: Sel surya konvensional bekerja menggunakan prinsip p-n junction, yaitu junction antara semikonduktor tipe-p dan tipe-n. Semikonduktor ini terdiri dari ikatan-ikatan atom yang terdapat elektron sebagai penyusun dasar. Semikonduktor tipe-n mempunyai kelebihan elektron (muatan negatif) sedangkan semikonduktor tipe-p mempunyai kelebihan hole (muatan positif) dalam struktur atomnya. Kondisi kelebihan elektron dan hole tersebut bisa terjadi dengan mendoping material dengan atom dopant. Dalam mendapatkan material silikon tipe-p, silikon didoping oleh atom boron, sedangkan untuk mendapatkan material silikon tipe-n, silikon didoping oleh atom fosfor. Ilustrasi pada gambar 2.20 menggambarkan junction semikonduktor tipe-p dan tipe-n. Gambar 2. 21 Simulasi Cara Kerja Sel surya III. PERANCANGAN PERANGKAT KERAS DAN LUNAK A. Study Literatur a. b. c. Mempelajari tentang pemrograman software arduino uno dalam penunjang pembuatan software aplikasi sistem kendali. Mempelajari tentang desain rangkaian dari microkontroler arduino ke PCB. Mempelajari tentang teknik interface antara input dan output arduino dengan LDR sebagai input dan motor DC yang dapat berputar reverseforwardsebagai output. B. Konfigurasi Sistem Diagram blok rangkaian merupakan salah satu bagian terpenting dalam perancangan suatu alat, karena dari diagram blok rangkaian inilah dapat diketahui cara kerja rangkaian keseluruhan. Sehingga keseluruhan diagram blok rangkaian tersebut menghasilkan suatu sistem yang dapat difungsikan atau dapat bekerja sesuai dengan perancangan. Adapun secara keseluruhan sistem ini dibagi menjadi dua bagian, yaitu perangkat keras (hardware) dan perangkat lunak (software). Gambar 2.20 Junction antara semikonduktor tipe-p (kelebihan hole) dan tipe-n (kelebihan elektron). Peran dari p-n junction ini adalah untuk membentuk medan listrik sehingga elektron dan hole bisa diekstrak oleh material kontak untuk menghasilkan listrik. Ketika semikonduktor tipe-p dan tipe-n terkontak, maka kelebihan elektron bergerak dari semikonduktor tipe-n ke tipe-p sehingga membentuk kutub positif pada semikonduktor tipe-n, dan kutub negatif pada semikonduktor tipe-p. Akibat dari aliran elektron dan hole ini maka terbentuk medan listrik yang mana ketika cahaya matahari mengenai susunan p-n junction ini mendorong elektron bergerak dari semikonduktor menuju kontak negatif, yang selanjutnya dimanfaatkan sebagai listrik, dan hole bergerak menuju kontak positif menunggu elektron datang. Gambar 3.1 Diagram blok Sistem Untuk sistem kerja secara umum pada rancang bangun pada sistem kendali reversed forward motor DC dan penggerak tirai terhadap input LDR ini, bertujuan pada sistem kendali untuk menjalankan motor sebagai pembuka/ penutup tirai dan mengontrol secara otomatis. Input pada alat ini menggunakan LDR yang akan membaca intensitas cahaya kemudian dikirim ke dalam 71 program pada microkontroler arduino yang telah terhubung langsung dengan driver sistem kontroler motor DC. Motor DC ini dapat berputar reverse-forward guna untuk dapat membuka dan menutup tirai, pada konstruksi pembuka / penutup tirai otomatis ini dipasang limit switch untuk membatasi pergerakan pada saat posisi terbuka atau tertutup. C. Perancangan dan pembuatan perangkat keras (HARDWARE) Gambar 3.3 Skema Penyambungan Relay ke Motor Dalam perancangan pembuka / penutup tirai otomatis ini menggunakan arduino uno sebagai dasar utama, Sehingga diperlukan sebuah modul ardoino uno sebagai otak pengontrol sistem. Perancangan Perangkat Keras dilakukan untuk menciptakan sebuah alat yang bisa membuka dan menutup tirai otomatis yang dapat dioperasikan dengan sensor ldr menggunakan arduino uno.Untuk perancangan hardware pembuka / penutup tirai otomatis berbasis mikrokontrollerdan sel surya sebagai supply energi diperlukan: 1) Baterai :Baterai 12 V DC berfungsi sebagai sumber tegangan ke rangkaian Arduino Uno dan Driver Motor shield 2) LDR (Light Dependent Resistor):LDR (Light Dependent Resistor) digunakan sebagai sakelar otomatis sebagai input yang akan mengidentifikasi intensitas cahaya yang didapat yang kemudian diproses oleh microkontroler arduino. 3) Arduino:Arduino yang berisi mikrokontroler ini menggunakan Arduino UNO R3 yang digunakan untuk mengolah data dari input dan menghasilkan output yang diinginkan dari program yang telah dibuat. 4) Relay: Relay berfungsi untuk menyalakan dan mematikan lampu dengan daya 220 AC. 5) Driver Interface:Driver interface sebagai antar muka antara mikrokontroler arduino dengan rangkaian daya. 6) Motor DC: Motor DC berfungsi sebagai penggerak untuk membuka dan menutup tirai. 7) Lampu: Lampu berfungsi sebagai output dari Ldr. 8) Solarcell: Solar cell berfungsi sebagai pengisi daya baterai dengan memanfaatkan sumber dari Cahaya matahari Skema rangkaian layout PCB alat pembuka / penutup tirai atau gorden otomatis bagian atas dapat dilihat pada Gambar 3.4 Gambar 3.4 Layout PCB Penggerak Tirai Bagian Atas Skema rangkaian layout PCB alat pembuka / penutup tirai atau gorden otomatis tampak bawah dapat dilihat pada Gambar 3.5 Gambar 3.5 Layout PCB Penggerak Tirai Bagian Bawah D. Perancangan dan pembuatan perangkat lunak (SOFTWARE) 1) Perancangan Perangkat Lunak : Pembuatan program data pada mikrokontroller adalah menuliskan kode atau perintah pada Arduino dalam mikrokontroler, penulisan perintah ini menggunakan bahasa pemrograman C pada software Code Vision AVR. Program data yangdirencanakan untuk mikrokontroler pada tugas akhir ini mempunyai fungsi sebagai berikut : 1. Menerima input dari sensor LDR Gambar 3.2 Perancangan Sistem Kendali 2. Memproses sinyal input dari sensor LDR 3. Nilai output dari rangkaian sensor cahaya, selanjutnya akan diterima oleh Pin input pada mikrokontroler dan mikrokontroler akan 72 memberikan nilai output pada PORD.0 danPORTD.1 dari mikrokontroller dan menjadinilai masukan bagi rangkaian driver motor. cuaca cerahah tetap tidak langsung terhadap sinar matahari, ketiga saattat cuaca mendung, keempat saat senja (menjelang malam), terakhir saattat malam hari dengan cahaya lampu. Ketiga nilai ini akan di rata-ratakanan untukuk dapat menentukan settingan nilai LDR yaitu pada nilai ke dua cerah tidak langsung ( waktu pagi hari ) Sekitar Pukul 05.30 – 06.0000 pada pengujian ini nilai input LDR > 50 maka tirai terbuka dan untukuk meutup tirai pada tahap pengujian ke lima pada saat senja (waktu tu maghrib)sekitar pukul 17.30 – 18.00 pada pengujian nilai inputLDRR diperoleh nilai < 50 di serial monitor arduino maka tirai menutup. Berikut tabel pengujian nilai intensitas cahaya dari ke tiga waktu yang dieroleh. 2 ) Flowchart sistem program Tabel 4. 1 Pengujian nilai input LDR Keterangan Has Has Hasil il 1 il 2 3 Pagi hari 97 94 96 Siang hari 521 524 529 Mendung 112 111 110 Senja (waktu magrib) 48 45 47 Malam (cahaya lampu) 31 29 30 Rata-rata 95 524 111 46 30 Gambar 3. 6 Flowchart sistem program B. Pengujian Input LDR ke Relay dengan Indikator Lampu Led Berdasarkan Gambar 3. 6 Flowchart sistem program merupakan sistem kerja Penggerak Tirai Otomatis dimulai dari LDR memberikan input untuk membaca kondisi cahaya, saat cahaya redup maka motor DC running forward untuk menutup tirai sampai mencapai batas waktu yang telah ditentukan maka motor DC forwardstop . Setelah waktu tercapai LDR akan kembali membaca cahaya bila cuaca terang maka motor DC running reversed untuk membuka tirai sampai batas waktu yang ditentukan maka motor DC reversed stop. Pada pengujian ini telah menginterface kan nilai intensitas cahaya dari LDR yang kemudian diproses pada arduino. Ketika LDR belum mendapat nilai settingan maka lampu led dalam kondisi mati, dan di saat LDR mendapat nilai settingan maka lampu led menyala. IV. PENGUJIAN DAN ANALISA HASIL PERCOBAAN C. Pengujian komponen pembuka / penutup menggunakan motor DC reversed-forward . 1. Pada bab ini dilakukan pengujian dan analisa terhadap beberapa alat yang telah dirancang dan dibuat pada bab sebelumnya. Untuk tahap-tahap pengujian yang akan dilakukan sebagai berikut : 1. 2. 3. Pengujian awal LDR terhadap intensitascahayayang didapatp pada saat pagi hari, kondisi cerah, mendung dansaatmalam ai untuk memperoleh nilai settingan pada program Arduino IDE. Pengujian input LDR dari nilai intensitas cahaya yang didapaat ke relay dengan indikator lampu led (Output) Pengujian keseluruhan komponen pembuka / penutup ti tirai menggunakan motor DC reversed-forward . 2. tirai Ketika tahap pengujan diharapkan otomatisasi alat sensor LDR terkena cahaya yang masuk melelui sensor, maka sensor akan memberikan input pada Arduino UNO, maka relay 1 akan aktif, kemudian motor akan bekerja membuka tirai, ketika mengenai batas waktu yang ditentukan, maka motor akan berhenti dan ketika itu pula busser 1 akan bunyi. Ketika tahap pengujian diharapkan otomatisasi alat sensor LDR tehalang dari caraya , maka relay 1 akan pasif, kemudian motor akan berputar ke kanan dan motor akan nutup tirai , ketika mengenai batas waktu yang ditentukan , maka motor akan berhenti dan ketika itu pula busser 1 akan mati. D. Pengujian Tegangan Keluaran Sel Surya A. Pengujian Awal LDR terhadap Intensitas Cahaya Pengujian awal ini untuk memastikan agar Sel surya dapat mengisi Pengujiaini dlakukan setiap jam mulai pukul 07.00 hingga pukul 16.00 pada saat cuaca cerah, dengan dua cara yang pertama sel surya diletakan diatas atap rumah secara tegak lurus , yang kedua dengan cara pelacakan posisi Pengujian awal ini untuk memperoleh nilai settingan inputtut LDR pada program Arduino.Pengujian ini dilakukan 3 kali denganan waktu berbedada dan kondisi cuacaberbeda.Pertama saat pagi hariiri cuaca cerahah langsung terhadap sinar matahari, kedua saat pagi hariiri 73 matahari. Pengujian ini dilakukan agar dapat menentukan daya optimal sel surya. Universitas 17 Agustus 1945 Cirebon, saya banyak mendapatkan bantuan, dorongan baik moril maupun spiritual dan informasi dari berbagai pihak. Pada kesempatan ini syay ingin mengucapkan rasa terima kasih yang sebesar besarnya kepada : 1. Dr. Ir. Hery Sonawan, MT, selaku Dekan Fakultas Teknik 2. Bapak Erfan subiyanta M. Eng selaku dosen pembimbing atas segala bantuan baik berupa bimbingan , diskusi, arahan, waktu, serta ilmu yang bermanfaatyang telah diberikan. 3. Bapak agus Siswanto ST., MT selaku pembimbing juga kaprodi Teknik Elektro yang telah meluangkan waktu untuk memberikan bimbingan, dukungan, semangat, koreksi dan nasehatnya. 4. Orang tua tercinta yang slalu memberikan dorongan dan memberikan kasih sayang, semangat, doa yang tiada hentinya dan banyak nasehat disaat saya belajar sehingga sampai selsaianya penyusunan Tugas akhir ini. 5. Istri tercinta Restiati, S. Pd yang selalu memberi semangat dan motivasi dalam menyusun Tugas Akhir ini. 6. Seluruh Dosen pengajar dijurusan Teknik Elektro yang telah memberikan pengajaran dan bimbingan kepada penulis 7. Seluruh civitas Universitas 17 agustus 1945 Cirebon atas semua ilmu yang bermanfaat yang telah diberikan.. 8. Teman-teman mahasiswa prodi teknik elektro UNTAG 1945 Cirebon 9. Untuk semua pihak yang tidak bisa disebutkan satu per satu sehingga Laporan Tugas Akhir ini selesai disusun. Tabel 4. 2 Pengujian Keluaran Tegangan Sel Surya Jam Tegak Lurus Pelacakan 07.00 9 V 10 V 08.00 10 V 12 V 09.00 12 V 14 V 10.00 14 V 14 V 11.00 16 V 16 V 12.00 16 V 16 V 13.00 16 V 16 V 14.00 16 V 16 V 15.00 14 V 14 V 16.00 12 V 14 V Berdasarkan dari tabel 4.2 pengujian tegangan sel surya dengan cara tegak lurus dan pelacakan dapat diperoleh nilai output tegangan sel surya maksimal dalam satu hari adalah 4 jam dimulai pada pukul 11.00 hingga 14.00. Dapat menghasilkan 3500 mah. V KESIMPULAN A. Kesimpulan Setelah melewati tahap pemasangan, realisasi, pengujian dan analisis Sistem Tugas Akhir ini, maka dapat diambil kesimpulan bahwa sebagai berikut : 1. 2. 3. 4. 5. Dengan ini alat dapat mengontrol tirai secara otomatis untuk membuka maupun menutup dilihat dari nilai intensitas cahaya yang didapat dari LDR. Tirai akan membuka dan menutup secara otomatis berdasarkan intensitas cahaya yang telah ditentukan pada program arduino. Intensitas cahaya yang didapat saat cuaca mendung dan akan datangnya malam pada sensor LDR melalui serial Monitor berbasis Arduino adalah senilai < 50. Sumber energi pada pembuka dan penutup tirai otomatis ini menggunakan sel surya yang memanfaatkan cahaya matahari sehingga dapat menghemat listrik PLN. Dari hasil pengujian dapat disimpulkan bahwa program dan hardware keduanya dapat berjalan dengan benar. REFERENSI [1] Naidoo, Kumi, Perubahan Iklim Global Energi Bersih Energi Matahari, diakses 25 Juli 2016, online http://www.greenpeace.org [2] Herman Widodo,Soemitro. 1985.Robot Otomasi Industri.Jakarta: Elex Media Komputindo. [3] Mustaqim. 2010. Analisa Peralihan Motor Arus Searah Dengan Bantuan Pemrograman Komputer. Teknik Elektro Universitas Dipenogoro [4] Tim Skripsi. 2016. Pedoman PenulisanSkripsi. Cirebon: Fakultas TeknikUniversitas17Agustus 1945 [5] Zazuli, Aplikasi Tenaga Surya, diakses 17 Juli 2016, online http://www.panelsurya.com/index.php/id/home/ UCAPAN TERIMAKASIH Puji syukur penulis panjatkan kehadirat Allah Yang Maha Esa atas segala nikmat, karunia serta ridhonya sehingga penulis dapat menyelesaikan proposal tugas akhir ini yang berjudul Desain Automasi ReverseForward Motor Dc Berbasis Mikrokontroller Dan Sel Surya Sebagai Suply Energi dalam Menyelsaikan Tugas Akhir ini dan selama belajar di Program studi Teknik Elektro Fakultas Teknik 74