H a l : Nilai mata kuliah
advertisement

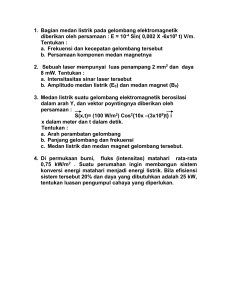
BAB VIII MOTOR DC 8.1 PENDAHULUAN Deskripsi Singkat Manfaat Relevansi Capaian Pembelajaran 8.2 PENYAJIAN 8.2.1 Definisi Motor DC Pembahasan mengenai prinsip dasar motor DC. Pembahasan bagian-bagian motor DC. Pembahasan tentang prinsip kerja motor DC. Pembahasan rangkaian ekuivalen motor DC. Pembahasan tentang cara menghitung besaran pada motor DC. Pembahasan jenis-jenis motor DC. Pembahasan tentang daya armatur maksimum. Pembahasan tentang bentuk perhitungan daya armatur maksimum. Pembahasan dasar-dasar pengaturan kecepatan Motor DC. Pembahasan pengaturan kecepatan berdasar flux, arus armatur dan tegangan. Pembahasan tentang pengembangan penganturan kecepatan tersebut untuk jenis Motor DC lainnya. Pembahasan karakteristik kopel, kecepatan putar terhadap arus armatur, dan karakteristik mekanik. Pembahasan tentang kondisi motor dc tanpa beban dan model matematisnya. Pembahasan tentang efisiensi motor DC dan cara menghitung efisiensi Motor DC. Dengan adanya pengetahuan tentang definisi motor DC, prinsip kerja, dan pengendalian motor DC serta implementasinya diharapkan mahasiswa dapat memahami dan mengembangkan implementasi yang lain hal-hal yang berkaitan dengan motor DC. Adanya pengetahuan tentang motor DC akan menambah wawasan bagi mahasiswa, kemudian agar dapat membedakan dengan aktuator jenis lain (motor stepper, motor servo), baik secara definisi maupun prinsip kerjanya. Dengan bekal pengetahuan yang telah diberikan pada bab ini diharapkan mahasiswa dapat menjelaskan definisi motor DC, jenis-jenis motor DC, daya armatur maksimum motor DC, pengaturan kecepatan motor DC, karakteristik motor DC, motor DC tanpa beban, efisiensi motor DC, dan simulasi motor DC. Sebuah motor DC adalah motor listrik mekanis commutated didukung dari sumber arus searah (DC). Stator adalah stasioner dalam ruang (secara definisi) dan karena itu begitu pula arusnya. Arus pada rotor diaktifkan oleh komutator juga menjadi diam di dalam ruang tersebut. Inilah bagaimana sudut relatif antara stator dan rotor fluks magnetik dipertahankan pada sekitar 90 derajat, yang menghasilkan torsi maksimum. DC motor memiliki armature berkelok-kelok yang berputar tetapi medan magnet armatur yang tidak berputar dan gulungan medan magnet statis atau permanen. Koneksi yang berbeda dari lilitan lapangan dan armature menyediakan berbagai melekat kecepatan / torsi karakteristik regulasi. Kecepatan motor DC dapat dikendalikan dengan mengubah tegangan diterapkan pada armature atau dengan mengubah arus medan. Pengenalan resistansi variabel dalam sirkuit armature atau bidang kontrol sirkuit kecepatan diperbolehkan. Modern DC motor sering dikendalikan oleh sistem elektronika daya yang disebut DC drive. Pengenalan motor DC untuk menjalankan mesin menghilangkan kebutuhan untuk uap lokal atau mesin pembakaran internal, dan sistem poros jalur drive. DC motor dapat beroperasi langsung dari baterai isi ulang, memberikan kekuatan motif untuk kendaraan listrik pertama. Saat ini motor DC masih ditemukan dalam aplikasi sekecil mainan dan disk drive, atau dalam ukuran besar untuk mengoperasikan pabrik baja rolling dan mesin kertas. Brsuhed DC motor listrik menghasilkan torsi langsung dari listrik DC dipasok ke motor dengan menggunakan pergantian internal, magnet stasioner (tetap atau elektromagnet), dan memutar magnet listrik. Seperti semua motor listrik atau generator, torsi yang dihasilkan oleh prinsip Lorentz kekuatan, yang menyatakan bahwa setiap konduktor pembawa arus ditempatkan dalam suatu pengalaman lapangan magnet eksternal torsi atau kekuatan yang dikenal sebagai kekuatan Lorentz. Keuntungan dari motor DC brushed termasuk biaya awal yang rendah, keandalan yang tinggi, dan kontrol sederhana kecepatan motor. Kerugiannya adalah pemeliharaan tinggi dan rendah rentang hidup untuk penggunaan intensitas tinggi. Pemeliharaan melibatkan secara teratur mengganti sikat dan mata air yang membawa arus listrik, serta membersihkan atau mengganti komutator. Komponen-komponen yang diperlukan untuk mentransfer tenaga listrik dari luar motor ke gulungan kawat pemintalan rotor di dalam motor. brushless DC motor menggunakan magnet permanen berputar pada rotor, dan stasioner saat magnet / kumparan listrik pada motor untuk rotor, tetapi sebaliknya simetris juga mungkin. Sebuah kontroler motor mengkonversi DC ke AC. Desain ini lebih sederhana dibandingkan dengan motor disikat karena menghilangkan komplikasi mentransfer kekuasaan dari luar motor ke rotor berputar. Keuntungan dari motor brushless meliputi rentang umur panjang, pemeliharaan sedikit atau tidak ada, dan efisiensi yang tinggi. Kerugian meliputi biaya awal yang tinggi, dan pengendali motor lebih rumit kecepatan. Beberapa motor brushless tersebut kadang-kadang disebut sebagai "motor sinkron" meskipun mereka tidak memiliki catu daya eksternal yang akan disinkronisasi dengan, seperti yang akan terjadi dengan normal sinkron AC motor. Jenis lain dari motor DC memerlukan pergantian no. * Bermotor homopolar - Sebuah motor homopolar memiliki medan magnet sepanjang sumbu rotasi dan arus listrik yang di beberapa titik tidak sejajar dengan medan magnet. The homopolar Nama mengacu pada tidak adanya perubahan polaritas. Motor homopolar tentu memiliki single coil-turn, yang membatasi mereka untuk tegangan yang sangat rendah. Hal ini telah membatasi aplikasi praktis dari jenis motor. * Ball bearing motor - Sebuah motor bantalan bola adalah motor listrik yang tidak biasa yang terdiri dari dua bantalan bantalan bola-jenis, dengan ras dalam terpasang pada poros konduktif yang umum, dan ras luar terhubung ke pasokan arus tinggi, listrik tegangan rendah. Sebuah konstruksi alternatif sesuai dengan ras luar di dalam tabung logam, sedangkan ras batin yang dipasang pada poros dengan bagian non-konduktif (misalnya dua lengan pada batang isolasi). Metode ini memiliki keuntungan bahwa tabung akan bertindak sebagai roda gila. Arah rotasi ditentukan oleh spin awal yang biasanya diperlukan untuk mendapatkannya pergi. 8.2.2 Prinsip Kerja Motor DC Prinsip kerja motor DC dapat dijelaskan sebagai berikut : jika sepotong kawat dialiri arus listrik terletak di antara 2 kutub magnet utara dan selatan, maka pada kawat tersebut terkena suatu gaya Lorentz. Arah dari gerakan kawat sesuai dengan aturan tangan kiri. Perhatikan Gambar 8.1 berikut. Gambar 8.1 Penentuan arah gerak kawat berarus Untuk mengetahui arah putaran motor searah atau berlawanan arah dengan arah jarum jam, perhatikan Gambar 8.2. Pada Gambar 8.2.a arus listrik yang mengalir melalui sisi kumparan sebelah atas (dekat kutub utara) meninggalkan kita, sedangkan arah arus listrik pada sisi kumparan sebelah bawah (dekat kutub selatan) menuju kita, maka kumparan akan berputar berlawanan jarum jam. Perhatikan pula perbedaannya dengan Gambar 8.2.b dan 8.2.c. Gambar 8.2 Prinsip kerja putaran motor DC Adapun bentuk rangkaian listrik dari motor DC tanpa penguat medan ditunjukkan pada Gambar 8.3. Di mana: Vt Ea Ia Ra KU KS : : : : : : tegangan sumber DC GGL induksi armatur arus armatur hambatan armatur kutub utara magnet kutub selatan magnet Gambar 8.3 Motor DC tanpa penguat medan Gambar 8.4 adalah bagan rangkaian listrik dari motor DC dengan menggunakan penguat kumparan medan terpisah. Gambar 8.4 Motor DC dengan penguat medan Sedangkan Gambar 8.5 menunjukkan bagan rangkaian listrik dari motor DC dengan penguat kumparan medan dalm sambungan shunt. Gambar 8.5 Motor DC sambungan shunt Dari Gambar 8.5 berlaku persamaan: Vt = Ia . Ra + Ea + Vs (dikalikan dengan Ia semua menjadi: ) Vt . Ia = (Ia)2 . Ra + Ea . Ia + Ia . Vs (8-1) Vt . IL = P in (daya input yang dibutuhkan dari sumber listrik) (8-2) Vt . Ia = Daya listrik yang dibutuhkan untuk memutar jangkar Ea . Ia = Pa (daya armatur) (Ia)2 . Ra = Rugi daya listrik pada jangkar Vsh = If . Rf = Vt = Arus jala-jala = (Ia + If) (8-3b) = Rugi tembaga total (Pcu)tot (8-4) IL (Ia2 . Ra + If2 Rf) (8-3) (8-3a) Gaya gerak listrik induksi armatur (Ea) timbul akibat kumparan rotor berputar yang terletak di antara kutub utara dan kutub selatan magnet motor. Pada saat awal rotor berputar, besar Ea = nol. Dengan demikian kumparan rotor akan menarik arus yang besar dari sumber listrik (persamaan 8-1). Setelah motor berputar pada kecepatan sebenarnya, Ea akan menjadi maksimum. Dengan demikian motor akan menarik arus listrik sumber paling minimum (arus nominal = sepersepuluh dari arus start). Besar torsi jangkar motor DC adalah sebesar: T= 0,159 x P / a x z x Ф x Ia (N.m) (8-5) K x Ф x Ia (N.m) (8-6) Atau: T= Di mana: Ф = flux dalam weber Jika panjang kumparan rotor L dialiri arus listrik sebesar I dan terletak di antara kutub magnet utara dan selatan dengan kerapatan flux sebesar B, maka kumparan rotor tersebut mendapat gaya F sebesar: F= B.I.L (8-7) Di mana: F = gaya lorentz (Newton) B = kerapatan flux magnet (Weber/m2) I = arus listrik (Ampere) L = panjang sisi kumparan rotor (m) 8.2.3 Macam-macam Motor DC Ada tiga jenis sambungan listrik antara stator dan rotor yang mungkin untuk DC motor listrik: seri, shunt / paralel dan senyawa (campuran berbagai seri dan shunt / paralel) dan masing-masing memiliki keunikan kecepatan / torsi karakteristik yang sesuai untuk profil torsi pemuatan diffent / tanda tangan koneksi Seri. Serangkaian motor DC menghubungkan gulungan angker dan lapangan di seri dengan sumber listrik DC umum. Kecepatan motor bervariasi sebagai fungsi non-linear torsi beban dan arus dinamo, saat ini adalah sama untuk kedua stator dan rotor menghasilkan I ^ 2 (saat ini) perilaku kuadrat [rujukan?]. Sebuah motor seri memiliki torsi awal yang sangat tinggi dan umumnya digunakan untuk memulai beban inersia yang tinggi, seperti kereta api, lift atau kerekan [2] ini kecepatan / torsi karakteristik berguna dalam aplikasi seperti excavator dragline, di mana. Bergerak alat menggali cepat ketika dibongkar namun perlahan ketika membawa beban berat. Dengan tanpa beban mekanik pada motor seri, arus rendah, counter-EMF yang dihasilkan oleh gulungan medan lemah, sehingga angker harus berputar cepat untuk menghasilkan kontra EMF-cukup untuk menyeimbangkan tegangan suplai. Motor bisa rusak oleh kecepatan lebih. Ini disebut kondisi pelarian. Seri motor disebut "universal motor" dapat digunakan pada arus bolakbalik. Karena tegangan armature dan sebaliknya arah lapangan di (substansial) saat yang sama, torsi terus diproduksi dalam arah yang sama. Karena kecepatan tidak berhubungan dengan frekuensi garis, universal motor dapat mengembangkan lebih tinggi dari kecepatan sinkron, membuat mereka lebih ringan dari motor induksi output rated sama mekanik. Ini merupakan karakteristik berharga untuk dipegang tangan alat-alat listrik. Motor Universal untuk frekuensi listrik komersial biasanya kecil, tidak lebih dari sekitar 1 output kW. Namun, motor universal jauh lebih besar digunakan untuk lokomotif listrik, diberi makan oleh khusus rendah frekuensi jaringan traksi listrik untuk menghindari masalah dengan pergantian di bawah beban berat dan bervariasi. Shunt. Sebuah motor DC shunt menghubungkan gulungan angker dan lapangan secara paralel atau shunt dengan sumber listrik DC umum. Motor jenis ini memiliki pengaturan kecepatan yang baik bahkan sebagai beban bervariasi, tetapi tidak memiliki setinggi memulai torsi sebagai rangkaian motor DC. [3] Hal ini biasanya digunakan untuk industri, aplikasi kecepatan disesuaikan, seperti alatalat mesin, berliku / unwinding mesin dan tensioners. Compound Suatu senyawa motor DC menghubungkan gulungan angker dan bidang dalam shunt dan kombinasi seri untuk memberikan karakteristik dari kedua shunt dan seri motor DC [4]. Motor ini digunakan ketika kedua torsi awal yang tinggi dan pengaturan kecepatan yang baik diperlukan . Motor dapat dihubungkan dalam dua pengaturan: kumulatif atau diferensial. Motor senyawa Kumulatif menghubungkan bidang seri untuk membantu bidang shunt, yang menyediakan torsi awal yang lebih tinggi, tetapi peraturan kecepatan kurang. Diferensial senyawa DC motor memiliki pengaturan kecepatan yang baik dan biasanya dioperasikan pada kecepatan konstan. 82.4 Pengaturan Motor DC Torsi dari motor listrik DC sebanding dengan produk dari kekuatan fluks angker saat ini dan lapangan. Hubungan antara kecepatan dan torsi tergantung pada eksitasi dari motor, kombinasi seri dan lilitan shunt dapat digunakan untuk menstabilkan kecepatan motor pada rentang beban mekanik. DC motor merespon perubahan beban dengan cara yang berbeda, tergantung pada susunan gulungan. Tegangan dalam kondisi tunak V = E_b + R I_a di mana: * V = tegangan input * Eb = EMF kembali * Ia saat ini = dinamo * R = total resistensi R resistansi total adalah sama dengan resistansi armature (Ra) + resistensi eksternal (Rph). luka Shunt bermotor Sebuah motor luka shunt memiliki medan tinggi resistensi berliku terhubung secara paralel dengan dinamo. Menanggapi beban meningkat dengan mencoba untuk mempertahankan kecepatan dan ini mengarah ke peningkatan arus dinamo. Hal ini membuatnya tidak cocok untuk luas-berbagai beban, yang dapat menyebabkan overheating.Seri luka bermotor Sebuah motor luka seri memiliki medan rendah resistensi berliku dihubungkan secara seri dengan armature. Menanggapi beban meningkat dengan memperlambat, meningkat saat ini dan torsi meningkat secara proporsional dengan kuadrat arus karena arus yang sama di kedua angker dan gulungan medan. Jika motor terhenti, saat ini hanya dibatasi oleh resistansi total dari gulungan dan torsi bisa sangat tinggi, tetapi ada bahaya dari gulungan menjadi terlalu panas. Seri luka motor secara luas digunakan sebagai motor traksi di transportasi kereta api dari setiap jenis, tetapi sedang bertahap untuk memenangkan motor induksi AC dipasok melalui inverter solid state. Penghitung-EMF membantu perlawanan angker untuk membatasi arus melalui armature. Bila daya yang pertama diterapkan pada motor, dinamo tidak berputar. Pada saat itu, EMF kontra-adalah nol dan satu-satunya faktor pembatas arus dinamo adalah resistansi armature. Biasanya perlawanan armature dari motor kurang dari 1 Ω, sehingga arus melalui armature akan sangat besar ketika listrik diterapkan. Oleh karena itu timbul kebutuhan untuk ketahanan tambahan dalam seri dengan dinamo untuk membatasi arus sampai putaran motor dapat membangun counter-EMF. Sebagai putaran motor membangun, perlawanan secara bertahap dipotong Kecepatan Output karakteristik torsi adalah karakteristik yang paling menonjol dari seri luka dc motor. Kecepatan yang hampir sepenuhnya tergantung pada torsi yang dibutuhkan untuk menggerakkan beban. Ini beban sesuai inersia besar sebagai kecepatan akan turun sampai motor perlahan-lahan mulai memutar & motor ini memiliki torsi mengulur-ulur sangat tinggi. motor magnet permanen Sebuah magnet permanen motor DC ditandai dengan rotor yang terkunci (stall) torsi dan tanpa beban kecepatan sudut nya (kecepatan). 8.3 PENUTUP 8.3.1 Tes Kemampuan 1. Sebutkan definisi motor DC ? 2. Bagaimana cara kerja motor DC ? 3. Jelaskan cara pengendalian motor DC !