Bab 2 Landasan Teori
advertisement

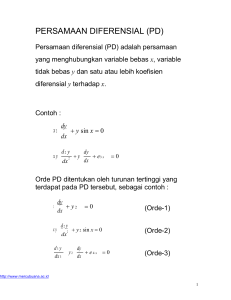
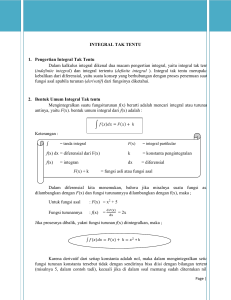
Bab 2 Landasan Teori Dalam bab ini akan dijelaskan mengenai Persamaan Air Dangkal linier (Linear Shallow Water Equation), metode beda hingga, metode ekspansi asimtotik biasa, dan metode ekspansi asimtotik multiple-scale. 2.1 Persamaan Air Dangkal Linier (Linier Shallow Water Equation) Persamaan air dangkal terdiri dari persamaan yang menyatakan hukum kekekalan massa dan persamaan yang menyatakan hukum kekekalan momentum. Kedua persamaan inilah yang mengaturaliran fluida. Sesuai dengan namanya, persamaan air dangkal hanya berlaku untuk medium fluida (air) yang dangkal. Pengertian air dangkal di sini berarti bahwa gelombang air yang diamati memiliki panjang gelombang yang cukup besar jika dibandingkan dengan kedalamannya. Apabila suatu domain air kedalamannya kurang dari sepersepuluh panjang gelombangnya maka 1 . Persamaan air domain tersebut tergolong ke dalam air yang dangkal atau hλ ≤ 10 dangkal juga sering digunakan untuk mempelajari gelombang tsunami dan gelombang di atmosfir. Perhatikan lapisan fluida di atas dasar tidak rata z = −h(x). Aliran fluida di 6 sini memenuhi persamaan air dangkal linier (SWE linier), yaitu ⎧ ⎨ η = −(h(x)u) t x ⎩ u = −gη t (2.1.1) x dengan η(x, t) menyatakan simpangan permukaan air dari kondisi setimbang, u(x, t) menyatakan kecepatan partikel air dalam arah horizontal, dan g percepatan gravitasi. Gambar 2.1: Komponen-komponen persamaan SWE linier Persamaan air dangkal linier (2.1.1) dapat dituliskan ke dalam bentuk lain. Perhatikan persamaan (2.1.1), apabila persamaan pertama pada (2.1.1) diturunkan terhadap t dan persamaan kedua pada (2.1.1) diturunkan terhadap x, kemudian dengan mengeliminasi utx dengan cara mensubtitusikan utx = −gηxx ke dalam persamaan ηtt dapat diperoleh bentuk lain dari persamaan gelombang, yaitu ηtt = g(h(x)ηx )x . (2.1.2) Demikian juga sebaliknya apabila persamaan pertama pada (2.1.1) diturunkan terhadap x dan persamaan kedua pada (2.1.1) diturunkan terhadap t, kemudian dengan mengeliminasi ηtx dengan cara mensubtitusikan ηtx = − [h(x)u]xx ke dalam persamaan utt dapat diperoleh persamaan gelombang dalam ekspresi yang berbeda, yaitu utt = g(h(x)u)xx 7 (2.1.3) Dengan demikian persamaan SWE linier (2.1.1) ekivalen dengan persamaan gelombang (2.1.2) dan (2.1.3). 2.2 Metode Ekspansi Asimtotik Multiple-scale Pada bagian ini akan dijelaskan mengenai metode ekspansi asimtotik dan variasinya yaitu Multiple-Scale Asymptotic Expansion untuk menyelesaikan persamaan diferensial. Selain itu, akan dijelaskan pula tentang perbedaan solusi yang dihasilkan keduanya yang merupakan alasan mengapa ekspansi asimtotik multiple-scale lebih baik daripada ekspansi asimtotik yang biasa pada contoh kasus yang diberikan. Definisi: 1. Fungsi-fungsi φ1 , φ2 , ... membentuk barisan asimtotik, saat ε → 0 jika dan hanya jika φn = o(φm ) (2.2.1) saat ε → 0 untuk semua m dan n yang memenuhi m < n 2. Jika φ1 , φ2 , ... adalah sebuah barisan asimtotik, maka f (ε) mempunyai suatu ekspansi asimtotik ke-n, yang berhubungan dengan barisan asimtotik sebelumnya, jika dan hanya jika f= m ak φk (ε) + o(φm ) untuk m = 1, ..., n (2.2.2) k=1 saat ε → 0, dimana ak bebas terhadap ε. Dalam hal ini, dituliskan sebagai f ∼ a1 φ1 (ε) + a2 φ2 (ε) + ... + an φn (ε) (2.2.3) saat ε → 0. φk disebut sebagai skala, atau ukuran, atau fungsi basis. Penyelesaian suatu persamaan diferensial dengan menggunakan metode ekspansi asimtotik diawali dengan mengasumsikan bahwa solusinya merupakan deret y0 , y1, ... dan diformulasikan sebagai y(t̂) ∼ y0 (t̂) + εy1 (t̂) + · · · 8 (2.2.4) Berikut ini akan diberikan sebuah contoh masalah sederhana dimana metode asimtotik biasa gagal. Misalkan diberikan sebuah persamaan diferensial y + εy + y = 0 (2.2.5) dengan syarat awal y(0) = 0 dan y (0) = 1 (2.2.6) Selanjutnya akan dicari y(t̂) yang memenuhi persamaan diferensial di atas. Dengan mensubtitusikan (2.2.3) ke dalam persamaan di atas, akan dihasilkan solusi 1 y(t̂) ∼ sin t̂ − εt̂ sin t̂. 2 (2.2.7) Sebagai pembanding solusi eksak persamaan diferensial (2.2.4) adalah y(t̂) = 1 e−εt̂/2 sin (t̂ 1 − ε2 /4) 1 − ε2 /4 (2.2.8) Gambar 2.2: Kurva solusi eksak dan kurva solusi hasil ekspansi asimtotik dengan nilai ε = 10−1 . Perhatikan Gambar 2.2, solusi eksak dan solusi (2.2.6) hanya ekivalen untuk nilai t̂ yang kecil, tetapi untuk nilai t̂ yang cukup besar perbedaannya sangat besar. Dari kedua kurva solusi yang diberikan terlihat bahwa solusi eksak menuju nol saat t → ∞, sedangkan solusi hasil ekspansi asimtotik semakin menjauhi solusi eksak saat t → ∞. Ini menunjukkan bahwa ekspansi asimtotik tidak cocok untuk menyelesaikan 9 persamaan diferensial (2.2.4). Sebagai gantinya akan diterapkan metode Ekspansi Asimtotik Multiple-scale yang akan disajikan berikut ini. Perbedaan antara metode ekspansi asimtotik multiple-scale dengan metode ekspansi asimtotik biasa adalah pada metode ini variabel bebasnya menjadi dua buah yaitu variabel cepat dan lambat t = t̂, dan t̄ = εt̂ (2.2.9) dengan penambahan variabel waktu ini, maka turunannya pun berubah menjadi ∂ d ∂ = +ε . ∂t ∂ t̄ dt̂ (2.2.10) Hasil subtitusi persamaan di atas ke (2.2.4) dan (2.2.5) memberikan (∂t2 + 2ε∂t ∂t̄ + ε2 ∂t̄2 )y + ε(∂t + ε∂t̄ )y + y = 0 (2.2.11) dengan syarat awal y(0, 0) = 0 dan (∂t + ε∂t̄ )y(0, 0) = 1 (2.2.12) Sehingga ekspansinya menjadi adalah y(t, t̄) ∼ y0 (t, t̄) + εy1(t, t̄) + · · · (2.2.13) Kemudian dengan mensubtitusikan ekspansi di atas ke (2.2.4) dan jika hanya melibatkan suku berorde O(1) dan O(ε), diperoleh (∂t2 + 2ε∂t ∂t̄ + ε2 ∂t̄2 )(y0 + εy1) + ε(∂t + ε∂t̄ )(y0 + εy1 ) + (y0 + εy1 ) = 0 (2.2.14) Persamaan di atas dapat dipisahkan berdasarkan suku-suku ε. Pertama, untuk orde O(1) : (∂t2 +1)y0 = 0, dengan y0 (0, 0) = 0, ∂t y0 (0, 0) = 1 dan solusi umumnya adalah y0 (t, t̄) = a0 (t̄) sin t + b0 (t̄) cos t (2.2.15) Syarat awal y0 (0, 0) = 0 dan ∂t y0 (0, 0) = 1 memberikan b0 (0) = 0 dan a0 (0) = 1. 10 Untuk mencari a0 (t̄) dan b0 (t̄) digunakan komponen-komponen dari persamaan (2.2.13) yang berorde O(ε). Selanjutnya, dengan mensubtitusi (2.2.14) ke dalam persamaan O(ε) diperoleh ∂ 2 y1 + y1 = (2b0 + b0 ) sin t − (2a0 + a0 ) cos t ∂t2 (2.2.16) Perhatikan bahwa ruas kanan (2.2.15) memuat suku-suku dengan frekuensi yang sama dengan solusi homogennya. Ini berarti bahwa akan terjadi resonansi, |y1(t)| → ∞ untuk t → ∞. Agar dapat memperoleh solusi yang berhingga maka haruslah ruas kanan dari (2.2.15) menjadi nol, atau 2a0 + a0 = 0 (2.2.17) 2b0 + b0 = 0 (2.2.18) Kemudian dengan menggunakan hasil yang diperoleh pada pembahasan sebelumnya, yaitu a0 (0) = 1 dan b0 (0) = 0, maka kedua persamaan di atas mempunyai solusi a0 (t̄) = et̄/2 , b0 (t̄) = 0. (2.2.19) Gambar 2.3: Kurva solusi eksak dan kurva solusi hasil metode ekspansi asimtotik multiple-scale dengan nilai ε = 10−1 . Jadi dengan ekspansi multiple-scale, solusi untuk persamaan diferensial (2.2.4) dengan syarat (2.2.5) adalah y ∼ eεt̂/2 sin t̂. 11 (2.2.20) Perhatikan bahwa (2.2.20) hanya merupakan solusi berorde O(1) saja, tetapi sudah menghasilkan solusi hampiran yang cukup baik (lihat Gambar 2.2). Dengan demikian metode ekspansi asimtotik multiple-scale memberikan solusi hampiran yang jauh lebih baik dibandingkan dengan metode ekspansi asimtotik yang biasa. 2.3 Metode Beda Hingga (Finite Difference) Metode beda hingga (finite difference) merupakan salah satu metode untuk mengetahui karakteristik dari solusi persamaan differensial dengan teknik komputasi. Hal ini disebabkan karena banyak persamaan diferensial yang solusi eksaknya sukar dicari atau sebagai perbandingan untuk memeriksa kebenaran solusi eksaknya. Pada dasarnya metode ini mendekati suatu fungsi satu peubah u(x), dimana x = jΔx, dengan nilai uj , j = 1, 2, ... dan Δx adalah lebar selang dari x (grid). uj ∼ u(xj ) Kemudian dari dua buah expansi deret Taylor masing-masing untuk u(x + Δx) dan u(x − Δx) : 1 1 u(x + Δx) = u(x) + u (x)Δx + u (x)(Δx)2 + u (x)(Δx)3 + O(Δx)4 2 6 1 1 u(x − Δx) = u(x) − u(x)Δx + u (x)(Δx)2 − u (x)(Δx)3 + O(Δx)4 2 6 diperoleh tiga buah hampiran untuk turunan pertama u (jΔx) yaitu : 1. Hampiran Beda Mundur u(jΔx) ∼ uj − uj−1 + O(Δx) Δx (2.3.1) uj+1 − uj + O(Δx) Δx (2.3.2) 2. Hampiran Beda Maju u(jΔx) ∼ 12 Gambar 2.4: (a) Skema diagram beda mundur, FTBS (forward time backward space) (b) Skema diagram meda maju, FTFS (forward time forward space) (c) Skema diagram beda pusat, FTCS (forward time center space) 3. Hampiran Beda Pusat u (jΔx) ∼ uj+1 − uj−1 + O(Δx2 ) 2Δx (2.3.3) dengan akurasi masing-masing sebesar O(Δx), O(Δx) dan O(Δx2 ). Selanjutnya, diperoleh hampiran beda pusat untuk turunan kedua, yaitu : u (jΔx) ∼ uj+1 − 2uj + uj−1 + O(Δx2 ) (Δx)2 dengan akurasi O(Δx2 ). 13 (2.3.4) Hal serupa berlaku pula untuk fungsi dua peubah u(x, t), pilih x = jΔx dan t = nΔt dengan t, n = 1, 2, ... sehingga u(x, t) dapat dituliskan sebagai u(xj , tn ) ∼ unj . Maka hampiran beda maju untuk ∂u ∂t dan ∂u ∂x adalah un+1 − unj ∂u j (jΔx, nΔt) ∼ + O(Δt) ∂t Δt (2.3.5) unj+1 − unj ∂u (jΔx, nΔt) ∼ + O(Δx) ∂x Δx (2.3.6) Hal yang sama berlaku untuk hampiran beda mundur dan beda pusat, rumusnya dapat dituliskan seperti pada (2.3.1 - 2.3.4) baik untuk peubah x ataupun t. Dalam menggunakan metode beda hingga ada tiga hal yang harus diperhatikan agar solusi yang dihasilkan dapat diterima atau tidak, antara lain: kestabilan persamaan beda, kekonsistenan persamaan beda, dan kekonvergenan persamaan beda. Penjelasan mengenai masing-masing hal akan dijelaskan pada bagian yang terpisah berikut ini. 2.4 Kekonsistenan dan Kekonvergenan Pada bagian ini akan dijelaskan mengenai konsep dari kekonsistenan dan kekonvergenan dari pendekatan metode beda hingga yang kemudian dilanjutkan dengan konsep kestabilan. Pendekatan dengan metode beda hingga memiliki dua jenis error, yaitu Global Truncation Error dan Local Truncation Error. Truncation error adalah error yang terdapat pada solusi hasil pendekatan numerik yang biasa diwakili oleh O(Δx) atau sejenisnya. Error seperti yang pada persamaan (2.3.1-6) termasuk ke dalam local truncation error. Sedangkan global truncation error merupakan error yang muncul pada solusi dari suatu persamaan diferensial sebagai efek kumulatif dari local truncation error. Error seperti ini sangat berpengaruh pada kestabilan, kekonsistenan, dan kekonvergenan dari skema suatu numerik, dalam pembahasan ini skema persamaan beda. 14 Kekonsistenan dan kestabilan secara tidak langsung mengarah pada kekonvergenan seperti yang telah didefinisikan oleh Lax. Kekonsistenan berarti bahwa, selama grid dari persamaan beda hingga (Δt, Δx → 0), truncation error menuju nol. Dengan kata lain, model persamaan beda hingga yang digunakan mendekati persamaan diferensial partialnya atau perbedaan atara keduanya mendekati nol. Misalkan untuk persamaan difusi ut = uxx , u(x, 0) = φ(x) (2.4.1) dengan menggunakan skema beda maju untuk ut dan beda pusat untuk uxx , maka persamaan bedanya adalah un+1 − unj unj+1 − 2unj + unj−1 j = Δt (Δx)2 (2.4.2) Perhatikan truncation error untuk persamaan difusi (2.4.1) − unj un+1 unj+1 − 2unj + unj−1 j + ≈ T.E (ut − uxx ) − Δt (Δx)2 (2.4.3) Jika TE (Truncation Error ) menuju nol saat Δt, Δx → 0 maka persamaan beda hingga yang digunakan konsisten dengan model persamaan diferensial parsialnya. Sebuah skema beda hingga dikatakan konvergen jika ûnj − unj → 0 (2.4.4) saat Δt, Δx → 0. Di sini . merupakan norm, yang menyatakan selisih antara solusi eksak û(x, t) dengan solusi hasil komputasi unj pada titik j, n. Terkadang syarat konvergen hanya dipenuhi untuk Δx dan Δt tertentu saja sedangkan untuk Δx dan Δt lainnya skema beda hingga menjadi tidak konvergen. Keadaan seperti ini sering disebut sebagai konvergen bersyarat. 2.5 Analisa Kestabilan von Neumann Metode beda hingga tidak menghasilkan sebuah fungsi û(x) sebagai aproksimasi dari fungsi u(x). Akan tetapi metode ini menghasilkan deretan nilai-nilai uj di setiap 15 titik xj . Deretan nilai-nilai inilah yang membentuk solusi aproksimasi dari fungsi u(x) dan grafik inilah yang selanjutnya disebut solusi numerik. Agar solusi yang dihasilkan tidak tumbuh secara eksponensial dibutuhkan suatu skema persamaan beda yang stabil. Hal ini bisa dilihat dari analisis kestabilan von Neumann, sebuah metode yang menentukan syarat kestabilan suatu masalah nilai batas dan masalah nilai awal. Hal yang harus diperhatikan bahwa analisis kestabilan von Neumann ini bersifat lokal, yang berarti metode ini mengasumsikan bahwa koefisien dari persamaan beda dianggap konstan dalam waktu dan ruang. Berdasarkan asumsi ini, solusi pada setiap titik dapat diformulasikan sebagai unj = ρn eikΔxj (2.5.1) dimana k adalah bilangan gelombang di ruang dan ρ adalah suatu bilangan kompleks yang biasa disebut sebagai amplification factor. Nilai mutlak amplification factor harus selalu kurang atau sama dengan satu, |ρ| ≤ 1, agar kriteria kestabilan untuk skema yang digunakan terpenuhi. Kemudian dengan mensubtitusikan (2.4.1) ke dalam persamaan beda akan menghasilkan pasangan nilai Δx dan Δt yang memenuhi kriteria kestabilan |ρ| ≤ 1 + O(Δt) (2.5.2) untuk setiap k dan nilai Δt yang kecil. Suku tambahan O(Δt) pada persamaan (2.4.2) hanya berlaku untuk masalah di mana solusi eksaknya bertambah sejalan dengan waktu. 16