I. PENDAHULUAN Sistem tenaga listrik umumnya terdiri dari
advertisement

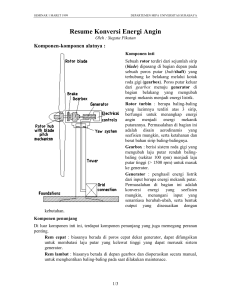
gangguan eksternal maupun internal. PERBAIKAN STABILITAS FREKUENSI DAN TEGANGAN PADA BEBAN DINAMIK SISTEM SULSELBAR MENGGUNAKAN METODEsering LINEAR Dalam kondisi demikian terjadi QUADRATIC REGULATOR (LQR) osilasi tiap bagian maupun antar bagian Nadjamuddin Harun, Sanatang pada sistemHasanuddin tenaga listrik Jurusan Teknik Elektro Fakultas Teknik Universitas Makassaryang sedang Jurusan Pendidikan Teknik Elektro Fakultas Teknik Universitas Negeri Makassar terinterkoneksi. e-mail: [email protected] , [email protected] Sistem tenaga listrik yang beroperasi Abstrak Banyak hal yang dapat mempengaruhi kestabilan tenaga listrik,stabil, salah satunya adalah dalam sistem keadaan memiliki beban dinamik yang mempengaruhi kestabilan dinamik. Kestabilan dinamik didefinisikan sebagai kestabilan sistem tenaga listrik akibat perubahan beban kecil yang berlangsung terus menerus. Bila keseimbangan antara daya input mekanis sistem tenaga listrik mengalami kenaikan atau penurunan beban maka akan terjadi perbedaan antara daya daya input mekanis dan daya output listrik pada (prime-mover) generator sinkron.dengan Penelitin ini output bertujuanlistrik. untuk mengetahui pengaruh beban dinamik terhadap kestabilan frekuensi dan tegangan pada sistem keadaan ini dengan semua generator interkoneksi Sulselbar yang selanjutnya menentukanDalam umpan balik dilakukan metode kendali optimal yaitu Linear Quadratic Regulator (LQR) berputar yang digunakan untuk mengendalikan stabilitas dalam kecepatan sinkron, setiap frekuensi dan tegangan pada beban dinamik sistem. Performansi dari pengendali yang didesain diaplikasikan pada system 150 kV interkoneksi Sulselbar yang terdiri 23 bus yaitubeban 7 bus generator kenaikan atau dari penurunan diikuti dan 16 bus beban. Simulasi ini dilakukan dengan pemodelan pada Matlab (analisis dengan m-file dan simulasi dengan simulink). dengan perubahan Kata kunci : Beban dinamik, eigen value, Linear Quadratic Regulator (LQR), stabilitas I. PENDAHULUAN daya mekanis prime-mover generator. Bila Sistem tenaga listrik umumnya terdiri dari beberapa pembangkit (sistem multimesin) yang terhubung secara interkoneksi melalui jaringan Transmisi. Tujuan interkoneksi sistem adalah untuk menjamin kelangsungan pasokan daya listrik ke beban [1]. Stabilitas frekuensi dan tegangan merupakan hal yag sangat vital dalam sistem tenaga listrik, karena berkaitan dengan keandalan dan keamanan sistem, oleh karena itu harus menjadi pertimbangan perencanaan maupun utama dalam pengoperasian. Sistem tenaga listrik modern memiliki banyak peralatan dinamik yang bevariasi, misalnya mesin-mesin sinkron dan beban yang secara terus-menerus rentan terhadap daya mekanis tidak dapat menyesuaikan dengan daya beban dan rugi-rugi sistem, maka kecepatan rotor generator (frekuensi sistem) dan tegangan akan menyimpang dari keadaan normal. Kelebihan daya mekanis terhadap daya listrik mengakibatkan percepatan putaran rotor atau sebaliknya. Bila kondisi gangguan seperti ini tidak diantisipasi, maka percepatan atau perlambatan putaran rotor generator akan menyebabkan hilangnya sinkronisasi dalam sistem. Sistem interkoneksi Sulawesi Selatan dan Barat salah satu sistem tenaga listrik yang cukup kompleks dengan beban yang besar, jarak antara pembangkit dengan beban yang cukup jauh, yaitu pembangkit simulasi dilakukan dengan bantuan sebagian besar di wilayah utara dan beban software Matlab m-file dan Simulink. kebanyakan di wilayah selatan. Stabilitas Secara umum langkah-langkah mendesain menjadi masalah yang utama yang salah pengendali untuk menambah kestabilan satu penyebab tidak stabilnya sistem dinamik sistem tenaga listrik adalah adalah karena beban yang terus bertambah sebagai berikut dan bervariasi. Stabilitas sistem tenaga listrik a. Pemodelan sistem tenaga listrik didefenisikan sebagai kemampuan sistem tenaga listrik pendukungnya atau untuk Sistem tenaga listrik secara umum perangkat terdiri atas pembangkit /generator, sistem mempertahankan eksitasi, governor, saluran transmisi dan sinkronisasi dan keseimbangan selama beban. operasi atau secara cepat dapat kembali diharapkan normal apabila terjadi gangguan [2]. masing-masing Secara umum bagan stabilitas sistem kelangsungan tenaga listrik dapat dilihat pada gambar 1. tenaga listrik, sehingga tetap berada dalam operasi Semua komponen bekerja dan normal. pada tersebut fungsinya untuk tujuan keandalan sistem Sistem kelistrikan Sulawesi Selatan dan Sulawesi Barat termasuk sebuah sistem yang besar, hingga saat ini pembangkit yang dimiliki sistem sulselbar yaitu PLTA Bakaru dengan dua unit generator , PLTD Suppa dengan enam unit generator, PLTGU sengkang dengan tiga unit generator, PLTD Tello dengan empat unit generator, Gambar 1. PLTU Tello dengan dua unit generator, II. METODE Penelitian ini mengunakan metode PLTG Tello dengan lima unit generator analisis menitik di beberapa daerah yaitu Makale, Pinrang, beratkan pada perbaikan performansi Mamuju, Palopo, Sinjai, Jeneponto dan sistem interkoneksi Sulselbar khususnya Bili-bili dengan 35 bus yang terhubung tegangan dan frekuensi. Analisis dan secara interkoneksi (ring loop). Beban dan simulasi yang serta beberapa pembangkit tenaga diesel yang disuplai pemukiman, adalah perkantoran, industri, dan untuk Persamaan matematis pada gambar 3 ditulis sebagai berikut : keperluan komersial. Pemodelan Generator [2] sebagai komponen utama yang berupa mesinmesin sinkron pada gambar (2). Data penting yang harus dimiliki oleh tiap Generator adalah besarnya daya (MVA), frekuensi dan kecepatan, tegangan jaring stator, arus jaring stator dan power factor. Gambar 3. Model Ekstitasi Dalam model transformasi mesin sinkron sering digunakan transformasi Park yang Kemudian komponen utama lainnya membagi pemodelan generator menjadi adalah tiga model yang dapat digunakan, yaitu: pengendali kecepatan Simplified Model (Classical model), Two generator, yang Axis Model, Model lengkap. Dalam model menstabilkan nilai torsi mekanik yang two-axis menjadi masukan generator pengaruh transient Governor yang merupakan rotor berfungsi pada untuk diperhitungkan, sementara pengaruh subtransient diabaikan. Pengaruh transient dipengaruhi oleh rangkaian rotor, dengan rangkaian medan pada sumbu d dan rangkaian ekivalen pada sumbu q Gambar 4. Model governor dibentuk oleh rotor solid. atau persamaan matematis governor sebagai berikut : Pm = -[Kg/(l + ω (1) Dengan: Gambar 2. Rangkaian transient ekivalen generator Pemodelan eksiter dapat dilihat pada gambar 3. Kg = Konstanta gain = 1/R = Governor time konstan Pemodelan Beban [3][4] Model beban beban dinamik yang sering digunakan untuk studi kasus pada stabilitas sudut, sebagai berikut : Beban dinamik adalah model 1.5 - 2.5 untuk npt. Sedangkan untuk nilai beban yang menunjukkan daya aktif dan nqs dan nqt berkisar antara 0 - 7 untuk nqs daya reaktif pada berbagai waktu sesaat dan 4 - 7 untuk nqt. Tp (time konstan) sebagai fungsi dari magnitude tegangan yang dan frekuensi pada waktu past instants recovery pada beban, dapat dipilih untuk dan present instant . Model beban ini merepresentasikan berbagai macam beban. biasanya persamaan Untuk beban industrial, pertanian dan air differensial. Model yang mengikuti pola conditioning yang rata-rata menggunakan ini dapat dituliskan sebagai berikut: motor induksi nilai Tp, Tq, berkisar antara menggunakan merupakan karakteristik respon 0.02 detik hingga beberapa detik. Tergantung (2.75) pada jumlah total motor induksi yang Dengan : Pd = load power demand Ps = final value of power demand Tp = time recovery response of the load Blok diagram dari persamaan di atas dapat dilihat pada gambar berikut : digunakan pada jumlah total beban. (2.76) Untuk beban yang terdiri dari industrial drives, seperti conveyer belts, atau untuk respon industrial plants seperti pelebur aluminium, nilai Tp berkisar antara 0.1 detik hingga 0.5 detik. Untuk mesin induksi nilai Tp dapat berkisar hingga beberapa detik, sedangkan untuk tap changer atau perangkat kendali lainnya mempunyai nilai Tp hingga beberapa menit dan beban pemanas hingga beberapa jam. Sedangkan blok digram hubungan Gambar 5. Model beban dinamik antara sistem tenaga listrik dengan beban dinamik sebagai berikut : Sedangkan PS(V) dan Pt(V) dapat ditentukan sebagai: PS(V) = Po(V/Vo)nps (2.82) Pt(V) = Po(V/Vo)npt (2.83) dengan Vo dan Po adalah tegangan nominal pada bus dan daya yang berkaitan dengan beban dan nps dan npt tegangan eksponen statik dan transient. Nilai nps dan npt berkisar antara 0 - 3 untuk nps dan Gambar 6. Hubungan antara system tenaga listrik dan beban dinamik Desain Pengendali Linear Quadratic Regulator (LQR) [5][6][8][10] ¥ Tujuan utama dari pengendali J = ò ( x * Qx + u * Ru )dt 0 untuk menambah kestabilan dinamis atau Dengan Q dan R adalah positif-definitif dengan kata lain menambah peredaman Hermitian atau matrik simetris real, dan u osilasi daya (damping) pada sistem tenaga tidak terbatas. Sistem kendali optimal kita listrik. Blok diagram sistem kendali perlukan ditunjukkan pada gambar berikut: kinerja, misalnya stabilitas sistem. untuk meminimumkan indeks Dengan berdasar pada ruas kanan persamaan di atas memperhitungkan biaya energi sinyal kendali. Matriks Q dan R menentukan kesalahan relatif dan biaya energi tersebut. Matrik Q dan matriks R adalah matriks pembobot, dimana matriks Q menentukan Gambar 7. Blok diagram sistem dengan pengendali Pada umumnya sistem kendali dapat dinyatakan dengan persamaan ruang keadaan sebagai berikut [5] : presisi dari kontroler, dan matriks R menyatakan biaya ekonomi dari kontroler. Dengan sinyal kendali u(t) = -Kx(t). Sehingga Performansi sistem menjadi A*P + PA - PBR-1 B*P + Q = 0 · X = Ax + Bu Dimana : x u A B C III. HASIL DAN PEMBAHASAN Simulasi dan hasilnya mengenai = = = = = state vektor vektor kendali matriks state dari sistem matriks input Output Desain sistem kendali optimal dan kemantapan sistem 150 kV interkoneksi sulselbar pada tiap-tiap generator setelah dipasang beban dinamik pada bus tertentu. Data yang digunakan dalam optimal regulator yang berdasarkan pada penelitian ini adalah data load flow beban indeks performansi kuadrat mengacu pada puncak tanggal 10 maret 2008 pukul penentuan elemen Kendali. 19.00 wita pada sistem interkoneksi Kemudian penentuan kendali Sulselbar. Total beban 459,90 MW. optimal u(t) untuk sistem dapat dituliskan Jumlah total bus 150 kV pada sistem sebagai berikut: interkoneksi Sulselbar adalah 23 bus yang matriks vektor terdiri atas 14 bus generator dan 16 bus beban, pada saat pengambilan data jumlah dan dibandingan dengan generator yang generator yang beroperasi adalah 7 unit lainnya sehingga didapatkan nilai matriks yaitu PLTA Bakaru, PLTD Suppa, PLTM diagonal untuk tiap generator , Teppo Pinrang, PLTD Mamuju, PLTGU Sengkang, PLTD Palopo & Masamba, Pembangkit Tello. Pada kondisi sebenarnya dalam satu 1. Simulasi beban statik pada sistem dengan feedback Simulasi ini dilakukan dengan sistem pada beban statik yang diberikan feedback (K) atau pengendali dengan . Gambar 4.10 pembangkit terdapat beberapa generator. menunjukkan hasil simulasi berupa respon Untuk mempermudah pembahasan, maka generator pada sistem dengan beban statik ayunan yang diberikan kendali. antar generator pembangkitan diabaikan. dalam satu Dan karena generator-generator tersebut identik dalam Generator Bakaru satu pembangkit, maka dapat diambil satu Simulasi dengan Pengendali untuk Feedback pada Sistem Rangkaian simulasi yang telah dilakukan dilanjutkan dengan memberikan feedback pada sistem yang nilai feedback Gambar 8. Respon tegangan atau K dihitung dengan metode Linear Quadratic Regulator. Penentuan nilai matriks pembobot Q dan matriks R dilakukan dengan metode trial and error dengan tujuan utama adalah mendapatkan indeks kenerja sistem J yang lebih optimal. dan Simulasi trial error dilakukan untuk menentukan nilai matriks pembobot Q diagonalnya yang nilai matriks ditentukan berdasarkan kapasitas pembangkit yang bekerja dan terinterkoneksi dengan sistem. Menentukan nilai pembobot Q diambil sebuah generator untuk dijadikan referensi Gambar 9. Respon frekuensi Setelah memasang kendali berupa feedback pada sistem dengan beban statik nampak bahwa respon tegangan generator Bakaru sebelum ada feedback peakrespon sebesar 0,17 pu dan mantap pada detik ke 2 sedangkan setelah pemasangan kendali berupa feedback peakrespon menjadi c.3. Nilai Eigen [8] lebih teredam 0.017 pu dan lebih cepat Nilai eigen pada sistem baik statik mencapai mantap pada detik ke 1. Jadi maupun setelah negatif, yang menandakan bahwa sistem pemasangan kendali terjadi peredaman osilasi sekitar 0.153 pu dan dinamik seluruhnya bernilai stabil. mencapai mantap lebih cepat 1 detik. hasil plot real eigen value beban Begitu pula respon frekuensi sebelum ada dinamik menunjukkan adanya pengaruh -4 kendali peakrespon sebesar 2,8 x 10 pu pemberian feedback pada sistem. Pada dan mantap pada detik ke 2,5 dan setelah tabel dipasang kendali peakrespon menjadi pergeseran eigen value dari sumbu khayal -4 4.2 pada λ5 nampak bahwa lebih teredam dengan nilai 0,3 x 10 pu sebelum ada feedback -0.8889 dan setelah dan mantap lebih cepat yaitu pada detik ke ada feedback eigen value bergeser cukup 1. Jadi respon frekuensi teredam sekitar jauh dari sumbu khayal yaitu -4 - 2.5 x 10 pu dan mencapai mantap lebih 29.871. cepat sekitar 1 detik. dengan adanya kendali tertutup pada system osilasi 2. Simulasi beban dinamik dengan feedback 1. pada sistem Generator Bakaru Data ini menunjukkan bahwa akan membuat lebih teredam karena semakin jauh real eigen value negatif dari sumbu khayal berarti osilasi semakin teredam. Tabel 4.2. Eigen value simulasi sistem dengan beban dinamik λ Gambar 10. Respon frekuensi generator Bakaru dengan pengendali LQR Gambar 11. Respon tegangan generator Bakaru dengan pengendali LQR Sebelum Feedback Setelah Feedback λ1 -0.159 -0.1551 λ2 -0.3375 -0.3527 λ3 -0.7279 -0.7296 λ4 -0.8809 -32.0927 λ5 -0.9881 -0.9889 λ6 -0.9909 -0.9905 λ7 -0.9946 -0.9946 λ8 -0.9987 -0.9985 λ9 -1 -1 λ10 -1.0193 -1.0098 λ11 -1.3889 -1.3889 λ12 -1.4286 -1.419 λ13 -1.4286 -1.4286 Quadratic Regulator (LQR). Sistem λ14 -1.4286 -1.4286 yang diberikan kendali (close loop) λ15 -1.4286 -1.4286 membuat λ16 -1.5625 -1.5606 terhadap beban dinamik dan statik λ17 -2.1277 -2.0664 λ18 -10.6383 -10.6383 λ19 -11.4943 -11.4943 λ20 -50.1619 -47.7717 λ21 -50.2647 -50.1865 Begitu λ22 -50.8634 -50.8567 menjadi lebih negative setelah adanya λ23 -51.1156 -51.1132 feedback. λ24 -51.343 -51.8215 λ25 -52.358 -52.367 λ26 -53.5513 -53.5813 pada sistem tanpa kendali (open loop). untuk λ28 -0.5647 + 0.0163i -0.5691 + 0.0174i λ29 -1.0014 - 0.0114i -0.9618 - 0.0149i λ30 -1.0014 + 0.0114i -0.9618 + 0.0149i eigen value mengembangkan penelitian lebih untuk pengembangan selanjutnya adalah sebagai berikut: Hasil penelitian ini masih berupa analisis, dimana nilai feedback yang SIMPULAN DAN SARAN didapatkan untuk aplikasi real di a. Simpulan Setelah melakukan Simulasi dan 150 dengan lanjut. Adapun saran yang dapat digunakan 1. Sulselbar pula b. Saran Setelah melakukan penelitian penting -0.5691 - 0.0174i pada generator mantap (steady state) lebih cepat dari -0.5647 - 0.0163i Analisis respon menjadi lebih teredam dan mencapai λ27 IV. osilasi Sistem kV, Interkoneksi maka lapangan masih membutuhkan perangkat kendali lainnya baik maupun software yang hardware dapat disimpulkan sebagai berikut : dapat diaplikasikan ke sistem, untuk 1. Beban itu diharapkan penelitian lebih lanjut dinamik mempengaruhi kestabilan frekuensi dan tegangan pada agar sistem Interkoneksi Sulselbar 150 kV, diaplikasikan. 2. Perbaikan stabilitas Frekuensi dan 2. kendali Kepada pihak LQR ini pengelolah dapat tenaga tegangan pada sistem dinamik dapat listrik (dalam hal ini PT. PLN dilakukan dengan memberikan kendali Persero) kiranya dapat membantu feedback para peneliti agar kendali ini bisa pada penentuan menggunakan nilai sistem feedback metode dengan (K) Linear direalisasikan pada Interkoneksi Sulselbar. system DAFTAR PUSTAKA [1] Djiteng Marsudi, Ir., Operasi Sistem Tenaga Listrik, Balai Penerbit & Humas ISTN, Jakarta, 1990 [2] Anderson, P.M., Fouad, A.A., Power System Control and Stability, The Iowa State University Press, 1982 [3] Milanovic, J.V. I.A.Hiskens, “Effects of Load Dynamic on Power System Damping”, IEEE Trans on Power System, Vol.10, no.2, May 1995. [4] Milanovic, J.V. I.A.Hiskens, “Load Modelling in Power System Damping”, IEEE Trans on Power System, Vol.10, no.4, May 1995. [5] Ogata, Katsuhiko, Teknik Kontrol Automatik, Jilid 2, Erlangga, Jakarta, 1997 [6] Frank L. Lewis, Optimal Control, Jhon Wiley & Sons. Inc, New York 1986 [7] Jhon, G. Vlachoginnis, FACTS Applications in Load Flow Studies Effect on the Steady State Analysis of the Hellenic Transmission System, IEEE, Electric Power Systems Research, Vol.55, Issue 3, Sept. 2000 [8] Kundur, Prabha, Power System Analisys and Stability, The Iowa State University Press [9] Saadat,Hadi, Power System Analisys, McGraw-Hill International Edition, 1999 [10] Xing, Liqun, A Comparation of Pole Assigment & LQR Design Methods for Multivariable Control for Statcom, A Thesis Requirement for the Degree of Master Science, Fall Semester 2003.