rancang bangun sistem pedal power sebagai energi alernatif
advertisement

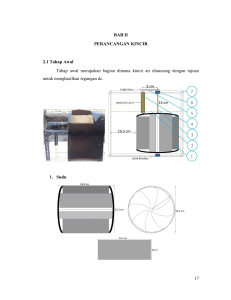
RANCANG BANGUN SISTEM PEDAL POWER SEBAGAI ENERGI ALERNATIF M. Thanthawi Yahya 1,Ir.Moh.Zaenal Effendi,MT.2, M. Machmud Rifadil SST, MT3 1 Mahasiswa Jurusan Teknik Elektro Industri, 2 Dosen Pembimbing pertama, 3 Dosen pembimbing kedua Politeknik Elektronika Negeri Surabaya Institut Teknologi Sepuluh Nopember Surabaya Kampus ITS Sukolilo Surabaya 60111 Telp (+62) 031-59447280 .Fax (+62) 031-5946114 e-mail: [email protected] ABSTRAK Dimana roda sepeda sebangai penggerak yang diputar oleh pedal fungsinya untuk memutar generator. Vasil energi dari generator di simpan dalam sebuah accu, untuk menyuplai beban. Sebelum menyuplai beban di searahkan DC ke AC dengan inverter I phasa dan di step up dengan menggunakan trafo step up untuk menyuplai beban. Sensor tegangan dan sensor arus sebagai indikator untuk setiap plant. Maka akan ketemu berapa daya yang dihasilkan selanjutnya daya tersebut di konversi ke energi untuk mencari nilai kalori maka ketemu berapa kalori yang dihasilkan. Dalam arti berapa tegangan yang dihasilkan maka kalori yang dihasilkan berapa, begitu juga sebaliknya. Dengan menggunakan metode PI yang dikontrol oleh mikrokontroler Atmega 8535. Mengontrol PWM dari Back Converter tegangan yang dihasilkan oleh generator DC. terlalu rendah atau terlalu besar tegangan yang di hasilkan maka PWM mengatur tegangan sesuai dengan nilai shet poin yang diinginkan. Dengan menampilkan nilai kalori, bisa mengetahui berapa kalori yang kita keluarkan untuk mengeluarkan tegangan dan arus pengisian pada aki. arus yang di keluarkan oleh generator sebesar 2 ampere jadi lama pengecesan agar aki menjadi penuh sekitar 13 jam, karena alat ini ditaruh di fasilitas umum,misalnya di tempat fitnes. Di amsumsikan setaiap orang mengayuh sepeda selama 1 jam. Maka pengecesan aki untuk menjadi penuh semakin cepat dari perhitungan. Kata kunci: PWM, generator DC, sensor arus, sensor tegangan, PI, inverter 1 phasa, mikrokontroller ATmega 8535, trafo step - up. I. Dimana Rancang Bangun Sistem Pedal Power Sebagai Energi Alternatif, itu sendiri mempunyai dua manfaat yaitu menghasilkan energi dan juga menyehatkan badan. Karena di saat menjalankan alat tersebut kita mengkayuh pedal sepeda dan sedangkan roda sepeda memutar generator dan generator pun menghasilkan energi listrik selanjutnya di simpan dalam aki (ACCU). Harapan dalam penelitian proyek akhir ini adalah dimana alat ini bisa menjadi sebuah solusi yang tepat untuk mengatasi krisis energi yang dihadapi sekarang. Dan tidak kalah pentingnya bahwa alat ini untuk daerah – daerah yang terpencil yang belum pernah tersentuh oleh listrik sama sekali. PENDAHULUAN Kebutuhan akan sebuah energi sangatlah luar bisa, dari hal sepele sampai besar semuanya menggunakan energi listrik. Contoh kasuh yang kecil adalah setiap kebutuhan rumah tangga sebagian besar sudah menggunakan listrik sebagai sumbernya. Dimana sekarang bahan baku utama (batu bara) untuk membakitkan listrik semakin menipis mungkin 15 tahun atau 20 tahun kedepan semuanya sudah habis. Mungkin tidak bisa dibayangin jika itu habis. Sudah saatnya kita menghemat energi atau mengembangkan energi alternatif yang ramah lingkungan dan juga murah biaya operasionalnya. Dalam proyek akhir ini yang berjudul Rancang Bangun Sistem Pedal Power Sebagai Energi Alternatif. Menjadi salah satu solusi untuk mengatasi masalah diatas. 1 II. Selain dinyatakan dengan Joule, energi listrik dapat dinyatakan juga dengan kalori. DISAIN PERENCANAAN Pada Bab ini di bahas mengenai perencanaan pembuatan alat software dan hadware dari sistem rancang bangun pedal power sebagai energi alternatif. Pada gambar 3.1 merupakan blok diagram keseluruhan sistem. Karena 1 kalori = 4,18 Joule…………………………..…(1) …………………………..(2) Oleh karena itu rumus energy lisrik menjadi : II.1 Perencanaan Converter Gambar 2.1 blok diagram keseluruhan sistem Tugas akhir ini tentang rancang bangun sistem pedal power dimana sistem pada plant ini adalah sebuah generator dikayuh oleh pedal sepeda untuk mengkonversi dari energi gerak menjadi energi listrik. Tegangan yang keluar dari generator masuk ke rangkaian buck converter, disini tegangan yang keluar dari generator di olah tegangannya oleh buck converter menjadi konstan yaitu 14 Volt. Tujuannya untuk bisa mengeces aki karena untuk bisa mengeces aki tegangannya harus di atas tegangan yang ada di nameplate aki tersebut. Kebetulan aki yang dipakai adalah 12 Volt 26 AH. Setelah mengeces aki sampai penuh maka digunakan untuk menyuplai beban yaitu beban resistif (lampu dan kipas angin). Karena tegangan aki DC sedangkan bebannya AC maka diperlukan inverter 1 phasa untuk mengubah tegangan DC menjadi AC kemudian di step up ke 220 Volt dengan menggunakan travo step up. Dengan menggunakan metode PI dimana yang dikontrol adalah sensor tegangan. Tujuannya adalah tegangan yang keluar dari buck converter bisa konstan, walaupun tegangannya besar maka buck converter menurunkan tegangan tersebut menjadi konstan yaitu 14 Volt. Selain sensor tegangan ada juga sensor arus dimana fungsinya untuk monitoring arus yang keluar dari buck converter. Selain itu sensor arus juga berfungsi sebagai pengkali untuk mendapatkan nilai kalori. Menggunakan rumus energi di konversi ke kalori . …………………...(3) Dan Pembuatan Buck AH battray (accu): Tegangan = 220 Volt Beban = - lampu 10 Watt x 2 = 20 Watt - Kipas angin 26 Watt x 1 = 26 Watt Total beban = 46 W Misal : efisiensi inverter = 85% η= Arus Input Inverter: - Asumsi pemakaian 6 jam maka AH battray = 4,4 A x 6 = 26,5 ≈ 27 AH Aki yang di pakai = 12 volt 27AH Asumsi pengecasan aki 10 jam maka - Misal : efisiensi buck converter = 85% Jadi Pout aki= Pinaki=Pin Inverter= Pout Buck Converter = 55 W η= - Disaint buck converter Vin= 15 - 52 V Vout = 14 V Iout= 4,32 A F =25 khz ∆Vo = 0,1% ∆IL = 20% 2 Menentukan kawat AWG: - Gambar rangkaian Di split menjadi 3 sehingga AWG yang dipilih no 22 diameter 0,64 mm - perhitungan rangkaian snubber - Perhitungan duty cycle - perhitungan nilai inductor cara 1. II.2 Cara 2. Perencanaan Dan Pembuatan Inverter Full Bridge Satu Phase Rangkaian inverter ini digunakan untuk merubah tegangan DC keluaran dari full bridge DC-DC converter menjadi tegangan AC sebesar 220 V. Komponen semikonduktor yang digunakan adalah IGBT. Gambar 3.9 menunjukkan gambar rangkaian inverter. Besarnya tegangan yang keluaran inverter bergantung pada sudut penyulutan dari base MOSFET. Pengaturan rangkaian trigger ini dilakukan dengan Pulse Width Modulation (PWM). - Perhitungan capasitor - jumlah lilitan Gambar 2.2 Rangkaian Inverter Full bridge 1 phasa Panjang kawat 3 //delay_us(1); ch2 = 0; ch3 = 0; } else { ch2 = 1; ch3 = 1; //delay_us(1); ch1 = 0; ch4 = 0; Gambar 2.3 Inverter 1 phasa } status = !status; Rangkaian daya Inverter satu fasa jembatan penuh terdiri dari 4 buahsaklar semikonduktor dalam hal ini adalah mosfet. Saklar S1 dan S4 ON-OFF secara bersama-sama demikian juga saklar S2 dan S3. Pada saat saklar S1 dan S4 ON, maka saklar S2 dan S3 OFF. Oleh karena itu pada saat saklar S1 danS4 ON maka tegangan input +VDC akan melewati beban. Dari penjelasan ini dapat digambarkan gelombang keluaran dan tegangan pada saklar semikonduktor seperti ditunjukan pada Gambar 3.8 } II.3 Perencanaan Dan Pembuatan Travo Step Up Dalam pembuat travo step up kali ini dengan inputan 12 Volt dan tegangan ouput 220 Volt. 1. Jenis transformator : Transformator stepup Parameter yang diketahui : Vp = 12 V Is = Vs = 220 V Efisiensi = 80 % 2. Menentukan daya primer dan daya skunder P primer = = = 57,4 VA Menentukan arus primer dan arus skunder 3. 4. Gambar 2.4 keluaran Inverter 1 phasa Program inverter pada mikrokontroler dengan frekuensi 50 Hz: // Timer 0 output compare interrupt service routine interrupt [TIM0_COMP] void timer0_comp_isr(void) { Menentukan Inti Besi (KERN) Panjang inti (b) : Lebar/tinggi inti besi ( h ) : Luas penampang inti (A) : //bit status; ch1 = 0; ch4 = 0; //delay_us(1); ch2 = 0; ch3 = 0; delay_us(10); Berat KERN Berat KERN (dalam =1,5xDaya primerx7,8 gram) = 1,5 if(status) { ch1 = 1; ch4 = 1; x 57,5 x 7,8 = 672,75 gram 4 5. Menghitung jumlah lilitan primer dan skunder Lilitan primer : Lilitan skunder : Gambar 2.5 gambar trafo step up 6. Menentukan ukuran (AWG) Diameter kawat primer ( kawat tembaga ): Gambar 2.6 trafo step up input Diameter kawat skunder ( ) : Maka ukuran kawat yang digunakan adalah 1 mm untuk lilitan primer dan 0,25 mm untuk lilitan skunder 7. Gambar 2.7 trafo step up output II.4 Total kawat AWG yang diperlukan : Keliling Bobin Inti Induktor = = 11,28 cm ≈ 12 cm Jika Toleransi Panjang Kawat = 50% Perencanaan Dan Pembuatan Sensor. A. Sensor Tegangan Sensor tegangan pada plant kali ini menggunakan sensor pembagi tegangan. Komponen utamanya adalah resistor yang di paralel. Untuk prinsip kerja sendiri hanya mengluarkan tegangan pada buck converter. = 720 + 360 c = 1080 cm = 10,80 m Gambar 2.8 rangkaian sensor tegangan = 12660 + 6330 = 18990 cm = 189,90 m Dari perhitungan diatas maka travo step up yang dihasilkan seperti pada gambar di bawah ini: Untuk pembuatan sensor pembagi tegangan dapat dihitung seperti dibawah ini, untuk tegangan input 14 Volt dari keluaran buck converter: 5 B. Sensor Arus Sensor arus ini mengunakan ACS7125A-T yang memiliki kemampuan arus sampai 20 Ampere. Keluaran dari ACS ACS712- 5A-T adalah tegangan dc ripple. Perubahan yang dihasilkan dari keluaran sensor arus ACS ACS712-5A-T ini sangat kecil sekitar 100 mV setiap perubahan 1 Ampere (sesuai data sheet). Pada gambar 3.6 merupakan modul ACS ACS712-5A dan untuk gambar rangkaian sensor arus pada gambar 3.7 Gambar 3.1 alat Sistem pada kontrol pedal power III.1 . Pengujian Sensor Tegangan Sensor tegangan ini menggunakan pembagi tegangan sehingga dilakukan pengujian pada tegangan ke)uaran pada buck converter. Tegangan yang keluar dari buck converter di kontrol oleh mikrokontroller supaya tegangan ang keluar clari buck converter menjadi konstan 14 Volt. Untuk pembuatan alat bisa dilihat Gambar 4.2, sedangkan pengujian sensor tegangan di lihat pada Tabel 3.1 Gambar 2.9 sensor ACS Gambar 2.10 rangkaian sensor arus III. HASIL PENGUJIAN DAN ANALISA Metode pengujian dilakukan dengan cara pengujian setiap alat dan pengujian saat semua alat diintegrasikan balk hardware dan software tegangan, sensor anus, buck converter, inverter 1 phasa, travo step up, mikrokontroller dan pengujian integrasi sistem. Mat sistem pengontrolan pada pedal power, bisa dilihat pada Gambar 3.1 dibawah ini. Gambar 3.2 Rangkaian Sensor Pembagi Tegangan Tabel 3.1 Hasil Pengujian Sensor Tegangan 6 Tabel 3.2 Data nenguiian sensor arus Acs Dari Tabel 3.1 terlihat data hasil pengukuran sensor tegangan yang diukur pada tegangan yang disensor dan tegangan keluaran dari sensor. Pengujian dilakukan dengan memberi tegangan sumber 5 Volt Dc sampai 35 Volt Dc dengan menggunakan power supplay Dc. Pengujian dilakukan dengan mengukur tegangan keluaran dari rangkaian pembagi tegangan. Hasil tegangan keluaran sensor pada saat tegangan 5 Volt maka keluaran tegangan sekitar 1,1 Volt dan pada saat tegangan 35Volt maka keluaran tegangan sekitar 8 Volt yang nantinya digunakan sebagai tegangan sensor yang masuk ke adc. III.2 Pada Tabel 3.2 merupakan hasil pengujian sensor arus. Pengujian ini dilakukan dengan memberikan ants antara 0 sampai dengan 2,9 Ampere. Kelm= sensor anus ini berupa tegangan dc antara 1,915V sampai dengan 2,264 V untuk arus 0 sampai dengan 2,9 Ampere. Untuk melihat hasil pengujian sensor arus pada Tabel 4.2 terlihat dari garfik antara anus terhadap tegangan keluaran sensor mendekati grafik linear yang nantinya akan ditentukan persamaan garis untuk digunakan sebagai persamaan penskalaan. Dan hasil pengujian sensor anus telah didapatkan besamya tegangan dc. Tegangan dc ini digunakan untuk pengolahan nilai pada mikrokontroller. Tegangan dc sebagai tegangan masukkan pada ADC mikrokontroller yang nantinya tegangan dc dikonversi menjadi nilai desimal (adc 8 bit). Nilai ADC ini yang akan diolah untuk penskalaan pada pemrogaman dalam menampilkan parameter arus dan tegangan. Berikut adalah grafik perubahan tegangan output sensor ACS712 terhadap arus yang melewati sensor acs 712: Peugujian Sensor Arus Pengujian sensor dilakukan dengan menggunakan variac sebagai beban. Terdapat tujuh step dalam beban, dimana setiap step bernilai 0.5A, Sensor arus ini dipasang seri terhadap beban. Untuk mengarnbil sinyal arus digunakan sensor anus ACS712 -5A , yang nantinya masuk ADC mikrokontroler. Gambar 3.3 Getombang keluaran sensor arus III.3 tegangan Pengujian Travo Step Up Gambar 3.4 gambar trafo step up 7 Pengujian travo step up dari 12 Volt di step up ke 220 Volt. Tegangan masukan travo step up dari inverter 1 phase. Tapi untuk pengujian kali ini travo step Up diberi sumber variac 1 phasa dengan tegangan output 12 Volt ac, beban yang digunakan adalah lampu 25 watt sampai 80 watt. Berikut ini adalah hasil gelombang pada penyulutan mosfet IRFP460LC. Sedangkan drivernya menggunakan autocoper 4N25. Untuk menyulutan PWM menggunakan mikrokontroller dengan frekuensi 50 Khz. Gambar 3.6 Rangkaian Inverter 1 phasa Gambar 3.5 pengujian trafo step up Data hasil pengujian travo step up dapat dilihat Tabel 3.3 Tabel 3.3 data pengujian trafo step-up Gambar 3.7 Rangkainan Driver Inverter 1 phasa menggunakan autoCoper 4N25. Hasil penyulutan mosfetnya sehesar 50 Khz, dengan menggunakan PWM yang di kontrol oleh mikrokontroller Dad data di atas dapat diambil analisa bahwa travo step up hanya bisa digunakan secara maksimal dengan beban 50 Watt. Karena pada awal pembuatan travo step up di disaint untuk beban 46 Watt dengan arus 0,2 ampere. Gambar 3.8 gelombang penyulutan pada mosfet Chl dan Ch4 dengan volt/div =5 V dan time/div = 5ms III.4 Pengujian Inverter full bridge 1 phasa Pengujian inverter 1 phasa dengan frekuensi 50 Khz yang di kontrol dengan mikrokontroller. Kerja penyulutan inverter itu sendiri seperti saklar on dan off. Di saat Ch1 dan Ch4 on maka Ch2 dan Ch3 off begitu juga sebaliknya apa bila Ch 1 dan Ch4 off maka Ch2 dan Ch3 on. Sedangkan keluaran gelombang inverter berupa gelombang kotak. 8 Data pengujian inverter juga bisa berupa tegangan inputnya di rubah - rubah untuk mengetahui keluaran tegangan inverter. Dengan cara mengubah nifai tegangan input pada inverter dari 5 Volt dc sampai 12 Volt dc. Dapat diketahui nilai tegangan output inverternya berupa tegangan Ac. Menggunakan lampu 40 watt sebagai beban. Data pengujian dapat dilihat pada Tabel 3.4 Gambar 3.9 gelombang penyulutan pada mosfet Ch2 dan Ch3 dengan volt/div = 5 V dan time/div = 5ms Tabel 3.4 basil nenguiian inverter 1 phasa III.5 Pengujian Buck Converter Pengujian buck converter kali ini dari pembuatan dan pengukuran core sampai keluaran tegangan input dan output buck converter. Dengan beban yang berbeda dan tegangan yang berubah - rubah dan jugs duty cycle_nya. Dengan mengguakan mikrokontroller dengan mitode PI dimana tujuannya adalah mengontrol tegangan keluaran buck converter supaya constan 14 Volt. Dalam pengujian kontrolnya sendiri bisa mencapai 14 Volt, walaupun tidak begin' sepurna tapi bisa mencapai tegangan 13,53 sampai 14 Volt. Data basil percobaan untuk percobaan buck converter bisa di lthat Tabel 4.5 dan Tabel 4.6 dari dua tabel tersebut yang membedakan adalah beban dan tegangan penyulutannya. Untuk Tabel 4.5 sumber yang diberik.an langsung dari generator Dc dan datanya bisa di lihat di bawah Tabel 4.6 menggunakan somber dari power suplay dengan tegangan konstan 30 Volt dan menggunakan beban lampu. Gambar 3.10 gelombang output inverter volt/div = 5 V dan time/div = 5ms Gambar 3.11 pengujian inverter dengan sumber power supplay 12 volt Gambar 3.12 pengujian inverter dengan sumber aki 12 Volt 26 Ah. 9 Tabel 3.5 sumber dari generator DC dengan beban aki Dari Tabel diatas bisa dilihat bagaimana basil percabaart dan perhitungan daya yang dipemleh dengan menggunakan beban lampu. Semakin besar nilai Rpm maka semakin besar nilai tegangan dan arusnya begitu juga dengan nilai daya yang dihasilkan. Daya output yang dihasilkan sekitar 0,6 watt sampai III.7 Pengujian Sistem Charger Dengan Control Tabel 3.8 data basil pengecesan dan mementukan kalori yang dihasilkan. Tabel3. 6 sumber dari power supplay dengan beban lampu Tabel 3.8 adalah data basil pengujian secara sistem yang sudah di integrasikan dengan alat - alat yang lainnya. Dengan data Tabel 3.8 untuk arus pengisian aki penuh pada arus maksimum 1.14 Ampere maka aki akan penuh selama 18 jam. Akan habis selama 7 jam dengan beban 45 Watt. Sedang ants pengisian pada arcs minimum 1.02 Ampere aki akan penubh selama 25 jam. Untuk Rpm 1100 membutuhkan kalori sekitar 616.43 dengan arus pengisian maksimal. Aki akan penuh selama 18 jam. III.6 Pengujian Sistem Charger Pengujian kali ini dilakukan untuk mengetahui berapa tegangan yang keluar jika RPM dan tegaangan berubah - ubah berdadarkan kecepatan atau RPM. Dari RPM 300 sampai dengan 1500 RPM. Dengan anus yang besar sekitar 1,2 A maka bisa mengeces aki. Sesuai dengan perhitungan pada disain menentukan buck converter maka Aki yang digunakan adalah 12Voh 26Ah. Data yang diambil berpatokan pada RPM pada motor maka didapat nilai yang di inginkan seperti tegangan input dan output, arus input dan ouput. Lebih lengkapnya bisa dilihat di Tabel 3.7 ditabel ini data yang diambil menggunakan beban lampu. IV. KESIMPULAN kesimpulan yang didapat dari pengujian pada alat serta basil yang didapat dari proses adalah sebagai berikut : • Hasil percobaan diatas bisa diambil kesimpulan dengan menggunakan w= 0,24 x V x I x t maka akan didapat nilai kalori yang di inginkan. • Dengan menggunakan aki 12 Volt 26 AH dengan arus pengecesan sekitar 1,3 A sampai 2 A maka aki tersebut bisa penuh kurang lebih 10 jam. • Kalori yang dihasilkan atau di hitung perdetik jadi kalori maksimal yang dihasilkan sebesar 616.43 kal. Tabel 3.7 data sistem chanter nada buck converter 10 • V. Dengan arus maksimal 1.14 maka arus pengisian selama 18 jam untuk aki menjadi penuh DAFTAR PUSTAKA [1]. Charlotha."Pengontrol Motor DC Sehagai Pengoptimal Torsi", Proyek Akhir EEPIS-ITS, 2007, Surabaya. [2]. Putra Dwi, Hijrah."Optimasi Daya Listrik Pada Perternakan Ayam Potong Dengan Siam ?Control Pi Berbasih Mikrokontroller (Perangkat Lunak)". Proyek Akhir EEPIS-ITS, 2007, Surabaya. [3] H. Jogianto Adi."Konsep Dasar Pemograman Bahasa C". ANDI, 2003, Yogyakarta. [4]. Dwi Hartong:), Thomas Wahyu dan Agung Prasetyo, Y. Wahyu. "Analisa Dan Derain Sistent !Control Dengan Matlap". ANDI, 2002, Yogyakarta. [5]. Andrianto, Heri."Pemograman Mikrokontroller AVR ATMEGA 16 Menggunakan Bahasa C (Code Vision AVRI". INFORMATIICA, 2008, Bandung [6]_ Charlota,"Pengontrol Motor DC Sebagai Pengoptimal Torsi". Proyek Akhir EEPIS-ITS, 2007, Surabaya. 11